Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Germe Sırasında In-Situ Periferik Sinir Gerinişinin Ölçümü için Doğrudan Doğrusal Dönüşüm
Bu Makalede
Özet
Bu protokol, gerilmiş periferik sinirlerin üç boyutlu yerinde yer değiştirmelerini yakalamak için doğrudan doğrusal dönüşüm kullanılarak kalibre edilmiş bir stereo görüntüleme kamera sistemi uygular. Bu yer değiştirmeleri yakalayarak, değişen derecelerde gerilmenin neden olduğu gerilme belirlenebilir ve gerilmeye bağlı sinir onarımı bilimini ilerletebilecek gerilme yaralanma eşikleri hakkında bilgi verilebilir.
Özet
Periferik sinirler gelişim, normal eklem hareketi, yaralanma ve daha yakın zamanda cerrahi onarım geçirirken fizyolojik ve fizyolojik olmayan gerilmeye uğrar. Periferik sinirlerin gerilmeye karşı biyomekanik tepkisini anlamak, farklı yükleme koşullarına verdikleri yanıtın anlaşılması ve dolayısıyla tedavi stratejilerinin ve cerrahi müdahalelerin optimize edilmesi için kritik öneme sahiptir. Bu protokol, kalibre edilmiş stereo görüntüleme kamera sistemi tarafından yakalanan video dosyalarının üç boyutlu koordinatlarından elde edilen, doğrudan doğrusal dönüşüm ve gerilme sırasında periferik sinirlerin üç boyutlu yerinde doku yer değiştirmesinin izlenmesi yoluyla stereo görüntüleme kamera sisteminin kalibrasyon sürecini ayrıntılı olarak açıklamaktadır.
Elde edilen üç boyutlu koordinatlardan, gerilmiş bir periferik sinir için sinir uzunluğu, sinir uzunluğundaki değişim ve zamana göre gerilme yüzdesi hesaplanabilir. Stereo görüntüleme kamera sistemi kullanmak, gerildiğinde periferik sinirlerin üç boyutlu yer değiştirmelerini yakalamak için invaziv olmayan bir yöntem sağlar. Doğrudan doğrusal dönüşüm, gerilmeyi ölçmek için gerilme sırasında periferik sinir uzunluğunun üç boyutlu rekonstrüksiyonlarını mümkün kılar. Şu anda, doğrudan doğrusal dönüşüm yoluyla kalibre edilmiş bir stereo görüntüleme kamera sistemi kullanarak gerilmiş periferik sinirlerin yerinde zorlanmasını incelemek için hiçbir metodoloji mevcut değildir. Gerildiğinde periferik sinirlerin yerinde gerilmesini yakalamak, klinisyenlere yalnızca aşırı gerildiğinde sinir hasarının altında yatan yaralanma mekanizmalarını anlamada yardımcı olmakla kalmaz, aynı zamanda gerilmeye bağlı müdahalelere dayanan tedavi stratejilerini optimize etmeye de yardımcı olur. Makalede açıklanan metodoloji, sinir yaralanması yönetimi ve rehabilitasyonu alanında hasta sonuçlarını iyileştirmek için gerilmeye yanıt olarak periferik sinir biyomekaniği anlayışımızı geliştirme potansiyeline sahiptir.
Giriş
Periferik sinirler (PN'ler) gelişim, büyüme, normal eklem hareketi, yaralanma ve ameliyat sırasında gerilmeye uğrar1. PN'ler,düzenli hareketler 2,3 sırasında siniri korumak ve sinir liflerinin yapısal sağlığını korumakiçin viskoelastik özellikler gösterir 2. Mekanik gerilmeye PN yanıtının, sinir lifi hasarınıntipine 4, bitişik bağ dokularındaki yaralanmalara 2,4 ve test yaklaşımlarına (yani yükleme hızı veya yönü) bağlı olduğu gösterilmiştir5,6,7,8,9,10,11,12,13,14PN'lerin normal hareket aralığı sırasındaki biyomekanik tepkilerini hem yavaş hem de hızlı esneme hızlarında fizyolojik olmayan aralığa karşı ayırt etmek önemlidir. Bu, gerilmeye yanıt olarak PN yaralanma mekanizmasının daha iyi anlaşılmasını sağlayabilir ve zamanında ve optimize edilmiş müdahaleye yardımcı olabilir 1,4,15,16. Fizik tedavide sinir fizyolojisi ve biyomekanik arasındaki ilişkiye dayalı olarak değerlendirme ve müdahale etme eğilimi giderek artmaktadır17. Uygulanan çeşitli yüklerde PN biyomekaniğindeki farklılıkları anlayarak, fizyoterapistler mevcut müdahaleleri değiştirmek için daha iyi hazırlanabilirler17.
Gerilmeye yanıt olarak PN'lerin mevcut biyomekanik verileri değişken kalır ve test ekipmanı ve prosedürlerine ve uzama veri analizindeki farklılıklara atfedilebilir 5,6,7,8,9,10,11,12,13,14,16. Ayrıca, üç boyutlu (3D) in-situ sinir yer değiştirmesinin ölçülmesi, şu anda mevcut literatürde yetersiz bir şekilde tanımlanmıştır. Önceki çalışmalar, faset eklem kapsüllerinin doku yer değiştirmesinin 3D rekonstrüksiyonunun doğruluğunu en üst düzeye çıkarmak için stereo görüntüleme tekniklerini kullanmıştır18,19. Doğrudan doğrusal dönüşüm (DLT) tekniği, iki veya daha fazla iki boyutlu (2B) görüntünün 3B gerçek dünya koordinatlarına (yani mm cinsinden) dönüştürülmesini sağlar20,21,22. DLT, 3D konumların hassas bir şekilde yeniden yapılandırılmasını sağladığı, lens bozulmasını, kamera parametrelerini ve görüntü koordinatlarını hesaba kattığı ve stereo görüntüleme kamerası kurulumunda esnekliğe izin verdiği için stereo görüntüleme kamera sistemleri için yüksek hassasiyetli bir kalibrasyon yöntemi sağlar 20,21,22. DLT ile kalibre edilmiş stereo görüntüleme kamera sistemlerini kullanan çalışmalar tipik olarak hareket ve yürüyüş analizini incelemek için kullanılır22,23. Bu protokol, DLT ile kalibre edilmiş bir stereo görüntüleme kamera sistemi ve açık kaynaklı bir izleme yazılımı22 kullanarak değişen gerilme derecelerinde PN'lerin yerinde suşunu belirlemek için ayrıntılı bir metodoloji sunmayı amaçlamaktadır.
Protokol
Açıklanan tüm prosedürler Drexel Üniversitesi Kurumsal Hayvan Bakımı ve Kullanımı Komitesi (IACUC) tarafından onaylanmıştır. Yenidoğan domuz yavrusu, ABD'nin Pennsylvania eyaletinde bulunan Amerika Birleşik Devletleri Tarım Bakanlığı (USDA) onaylı bir çiftlikten satın alındı.
1. Stereo görüntüleme sistemi kurulumu
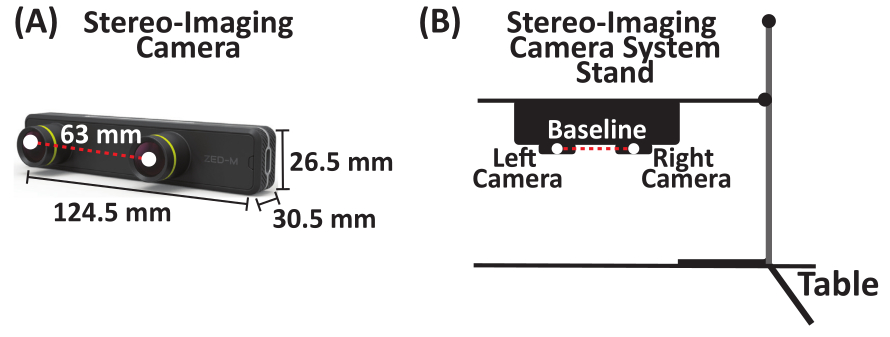
- 100 kare/sn'ye (FPS) kadar çekim yapabilen bir stereo görüntüleme kamera sistemini bir yardımcı standa bağlayın. Bu çalışmada kullanılan stereo görüntüleme kamera sistemi, 63 mm'lik bir taban çizgisi ile ayrılmış, yatay olarak hizalanmış iki kameraya (sol ve sağ kameralar olarak adlandırılır) sahip pasif bir stereo kameradır (Şekil 1).

Resim 1: Stereo görüntüleme kamera sistemi. (A) 63 mm'lik bir taban çizgisi ile ayrılmış iki kameralı (sol ve sağ kameralar) paralel stereo görüntüleme kamera sistemi. (B) Stereo görüntüleme kamera sistemi ve stand kurulumunun şeması. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
2. Stereo görüntüleme sistemi DLT Kalibrasyonu, 3D kontrol hacmini sayısallaştırıyor
- Üç şeffaf akrilik pleksiglas kare levha (12 inç x 12 inç x 0,125 inç) elde edin. Her sayfaya bir ızgara yerleştirin ve en az 10 nokta çizin, böylece x, y ve z koordinat düzlemlerinde 3B kontrol hacmine en az 30 nokta dağıtılsın. Kaydedilecek olanın maksimum yüksekliğini yakalamak için üç sayfayı farklı yüksekliklerde istifleyerek 3D kontrol hacmini oluşturun (Şekil 2A).
- Ayak pedallı bir sayısallaştırıcı kullanarak 3D kontrol ses seviyesindeki tüm noktaları sayısallaştırın. 3D kontrol küpünde orijini (0, 0, 0) belirleyerek, pozitif x ve y yönlerini tanımlayarak, sayısallaştırılmış (x, y, z) koordinatları (mm cinsinden) kaydetmek için bir belge açarak x, y ve z koordinatlarını (mm cinsinden) elde edin (Şekil 2B) her noktanın ve (x, y, z) koordinatları (mm cinsinden) bir *.csv dosyası olarak kaydedin.
NOT: (x, y, z) koordinatları, 3D kontrol küpünde ayarlanan başlangıç noktasına göredir. - Stereo görüntüleme kamera sisteminin sırasıyla sol ve sağ kameralarını kalibre etmek için bu sayısallaştırılmış (x, y, z) koordinatları (mm cinsinden) kullanın.

Şekil 2: Ayak pedallı üç boyutlu kontrol ses seviyesi ve sayısallaştırıcı. (A) 3D kontrol hacminin şeması. (B) Mm cinsinden (x, y, z) koordinatları elde etmek için 3D kontrol sesini sayısallaştırmak için kullanılan ayak pedallı sayısallaştırıcı bileşenleri. Kısaltma: 3D = üç boyutlu. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
3. Stereo görüntüleme kamera sistemi kalibrasyonu-doğrudan doğrusal dönüşüm katsayılarının üretilmesi
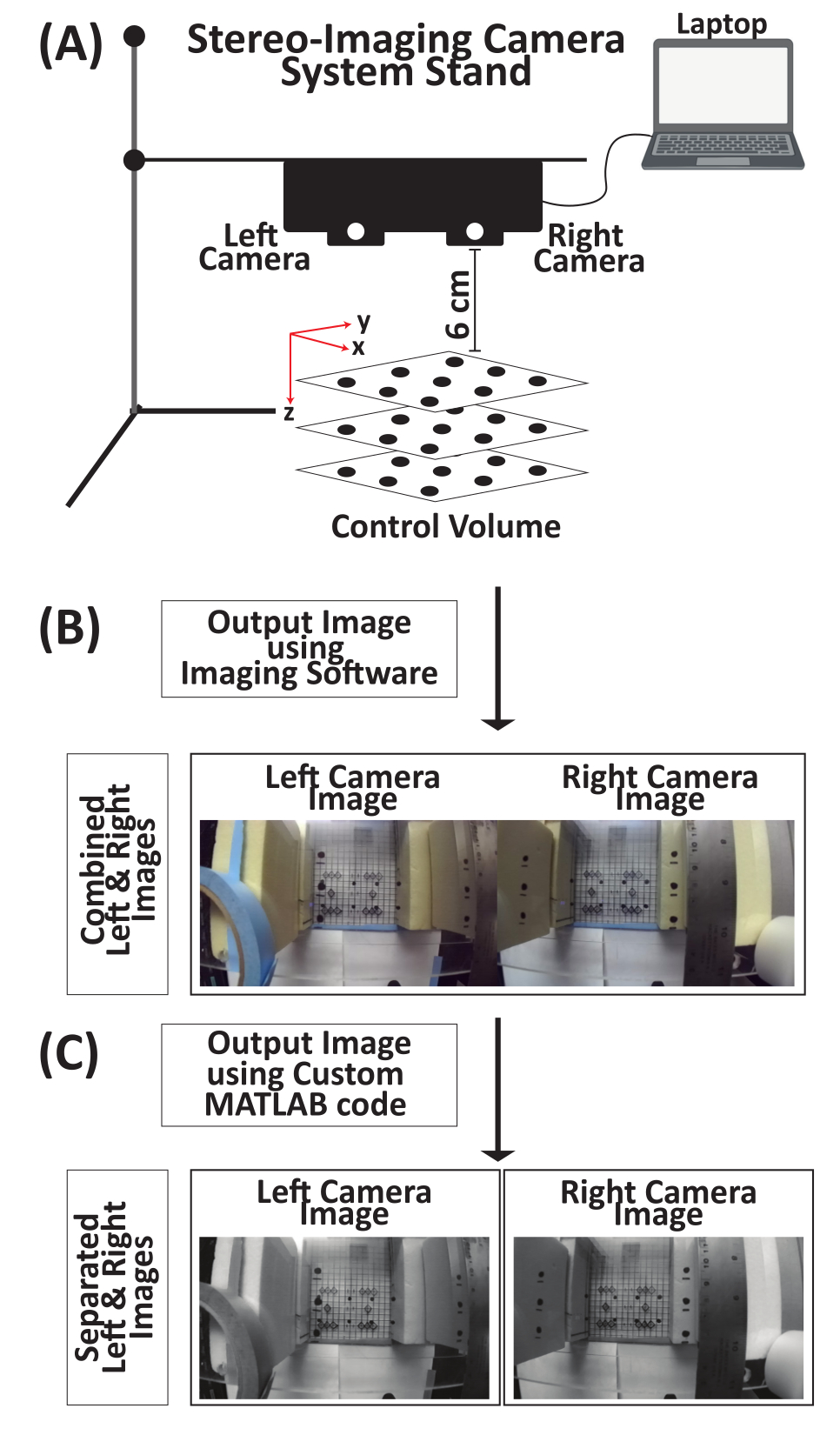
- Stereo görüntüleme kamera sistemini bir yardımcı program standına takın (Şekil 3A).
- Stereo görüntüleme kamera sistemini 6D kontrol ses seviyesinin 3 cm üzerine yerleştirin (Şekil 3A).
- Stereo görüntüleme kamera sistemini bir USB Type-C kablosuyla bir dizüstü bilgisayara bağlayın.
- Görüntüleme yazılımını açın (Malzeme Tablosuna bakın).
- 3D kontrol ses düzeyini görüntüleyin. Çıktı görüntüsü (Ek Şekil S1) hem sol hem de sağ kamera görünümlerini içerir (Şekil 3B).
- Çıktı görüntüsünü sırasıyla sol ve sağ görüntüler olmak üzere iki görüntüye ayırmak için özel MATLAB kodunu (Ek Dosya 1) çalıştırın (sırasıyla Şekil 3C, Ek Şekiller S2 ve Ek Şekiller S3).
- DLTcal5.m GUI22'yi (Ek Dosya 2) başlatmak için Çalıştır'a tıklayın.
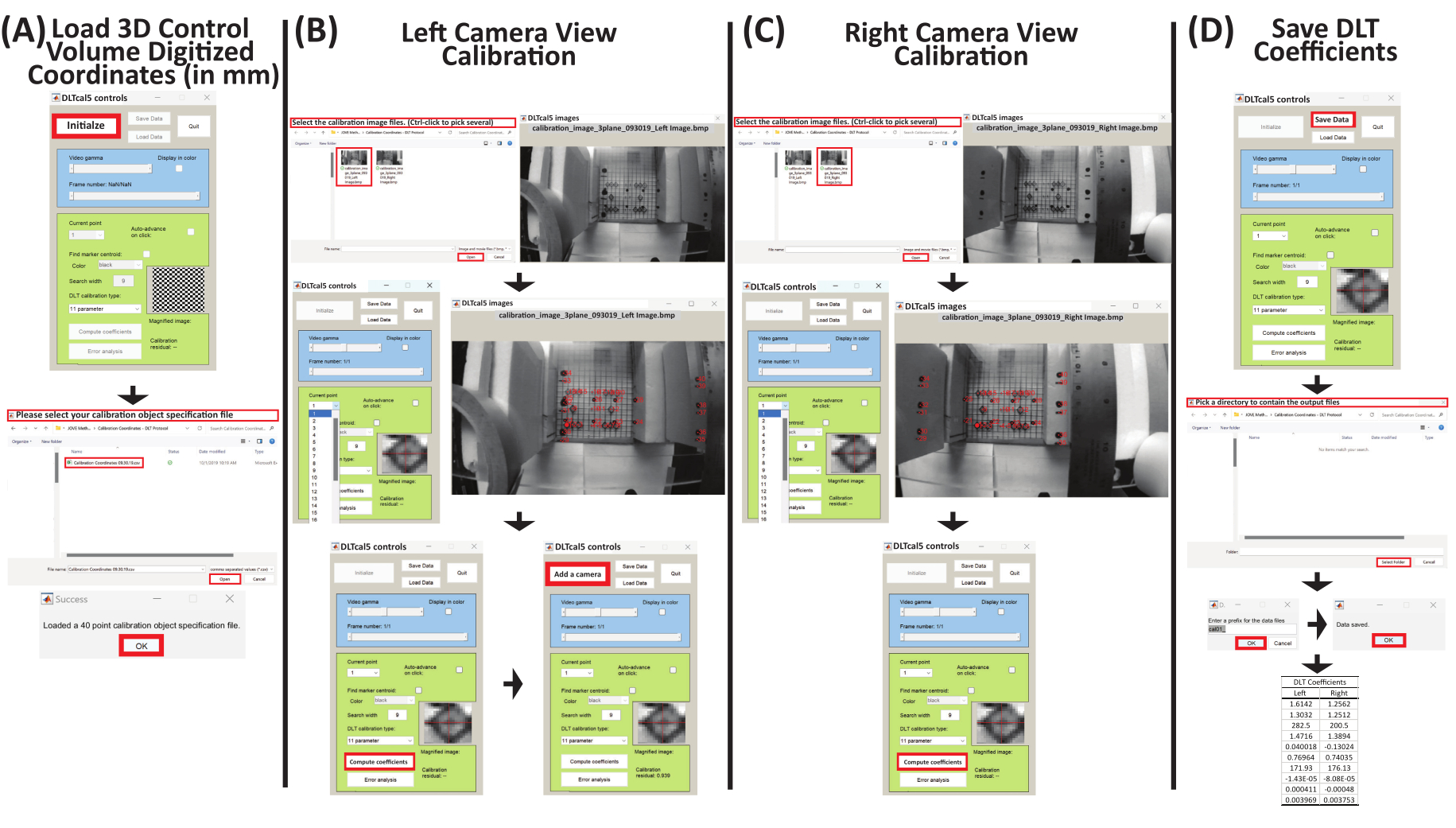
- Sayısallaştırılmış (x, y, z) koordinatları (mm cinsinden) olan *.csv dosyasını seçmek için DLTcal5 kontrolleri penceresinde başlat'a tıklayın (Şekil 4A ve Ek Dosya 3).
- Stereo görüntüleme kamera sisteminin ilk görünümünden 3D kontrol ses seviyesinin ilgili görüntüsünü seçin (Ek Şekil S2). Bu stereo görüntüleme kamera sistemi için, sol kamera görüntüsü ilk kamera görüntüsüne karşılık gelir (Şekil 4B).
- İlk kamera görünümü görüntüsü (yani sol kamera görünümü) açılır.
- Sol kamera görünümünden 2B piksel koordinatlarını elde etmek için Bölüm 2'de noktaların sayısallaştırılma sırasına göre noktaları seçin (Şekil 4B).
- DLTcal5 Kontrolleri penceresinde geçerli noktayı ayarlayın ve yüklenen ilk kamera görünümünde (yani sol kamera görünümü) görüntüsünde karşılık gelen geçerli noktaya tıklayın.
- Yüklenen ilk kamera görünümündeki tüm noktaları seçtikten sonra, sol kamera görünümü için 11 DLT katsayısını oluşturmak için hesaplama katsayılarına tıklayın (Şekil 4B).
- DLTcal5 kontrolleri penceresinde bir kamera ekle'ye tıklayın ve doğru kamera görünümü (yani ikinci kamera görünümü) için 11 DLT katsayısını oluşturmak için 3.7.2-3.7.6 adımlarını tekrarlayın (Şekil 4B, C ve Ek Şekil S3).
- Çıktı dosyalarının kaydedileceği klasörü seçmek için DLTcal5 kontrolleri penceresinde verileri kaydet'e tıklayın (Şekil 4D).
- Çıktı dosyaları, stereo görüntüleme kamera sisteminin sol ve sağ kamera görünümleri için 2D (x, y) piksel koordinatlarını (Ek Dosya 4) ve karşılık gelen 11 DLT katsayısını içerir (Şekil 4D ve Ek Dosya 5).
- Stereo görüntüleme kamera sistemi kalibre edilmiştir.

Şekil 3: Doğrudan doğrusal dönüşüm kalibrasyonu için bir stereo görüntüleme kamera sistemi kullanarak üç boyutlu kontrol hacminin bir görüntüsünü elde etmek için şematik. (A) Stereo görüntüleme kamera sistemini bir standa takın ve ardından bir USB Type-C kablosuyla bir dizüstü bilgisayara bağlayın. 3D kontrol sesini stereo görüntüleme kamera sisteminin 6 cm altına yerleştirin. (B) Görüntüleme yazılımını kullanarak 3D kontrol ses düzeyinin bir görüntüsünü alın. Çıktı görüntüsü, sol ve sağ kameralardan gelen birleşik bir görüntüdür. (C) Özel bir MATLAB kodu kullanılarak, birleştirilmiş çıktı görüntüsü, 3D kontrol hacminin ayrı sol ve sağ görüntülerine ayrılır. Kısaltma: 3D = üç boyutlu. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: Bir stereo kamera görüntüleme sisteminin sol ve sağ kamera görüntüleri için doğrudan doğrusal dönüşüm katsayıları oluşturmak için şematik. (A) DLTcal5.m22'yi çalıştırın, kontroller penceresinde başlat'a tıklayın ve 3D kontrol hacminin sayısallaştırılmış (x, y, z) koordinatlarını (mm cinsinden) içeren *.csv dosyasını seçin. (B) Sol kameranın kalibrasyon görüntüsünü seçin. Ardından, görüntüdeki noktaları sayısallaştırıldıkları sırayla seçin. Ardından, sol kamera görünümü için DLT katsayılarını oluşturmak üzere hesaplama katsayıları'na tıklayın. Ardından, doğru kamera görünümü için adımları tekrarlamak üzere Kamera ekle'yi tıklayın. (C) Sağ kamera görüntüsünün kalibrasyon görüntüsünü seçin. Ardından, görüntüdeki noktaları sayısallaştırıldıkları sırayla seçin. Ardından, doğru kamera görünümü için DLT katsayılarını oluşturmak üzere katsayıları hesapla'ya tıklayın. (D) Sol ve sağ kamera görünümleri için DLT katsayılarının kaydedileceği dizini seçmek için Verileri Kaydet'e tıklayın. Çıktı dosyasının adını girin ve Tamam'a tıklayın, DLT katsayıları bir *.csv dosyası olarak kaydedilir. Kısaltma: 3D = üç boyutlu ve DLT = doğrudan doğrusal dönüşüm. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
4. Veri toplama
- Anestezi uygulanmış yenidoğan Yorkshire domuz yavrusunu (3-5 günlük), aksiller bölgeyi açığa çıkarmak için abdüksiyonda üst ekstremiteler olacak şekilde sırtüstü pozisyonda yerleştirin. Deri ve fasya boyunca trakeanın üzerinden sternumun üst üçte birlik kısmına kadar orta hat insizyonu yapın.
- Brakiyal pleksus sinirlerini ortaya çıkarmak için künt diseksiyon kullanın.
- Test öncesinde, sırasında ve sonrasında susuz kalmalarını sağlamak için açıkta kalan brakiyal pleksus sinirine tuzlu su çözeltisi sıkın.
- Brakiyal pleksus PN'nin distal ucunu kesin ve mekanik test aparatına kelepçeleyin.
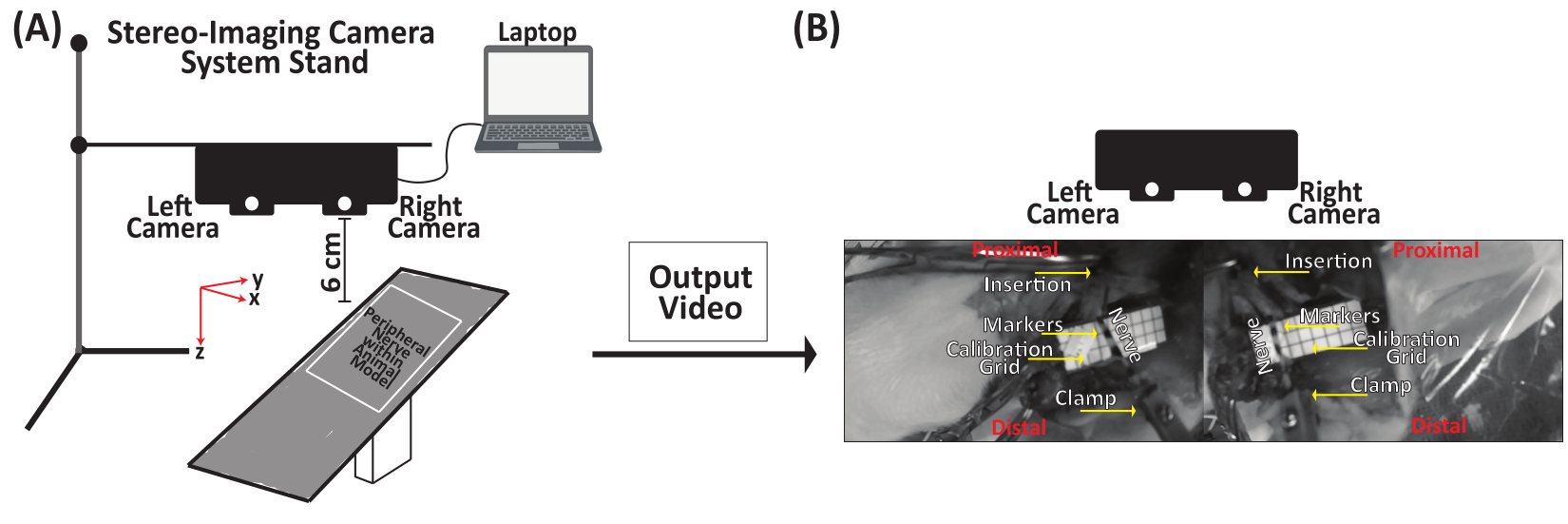
- Stereo görüntüleme kamera sistemini yardımcı standa takın, gerilecek PN'nin 6 cm yukarısına kadar yerleştirin ve ardından stereo görüntüleme kamera sistemini bir USB Type-C kablosuyla bir dizüstü bilgisayara bağlayın (Şekil 5A).
- Yerleştirme ve kenetlenme bölgelerine işaretleyiciler yerleştirmek için mürekkep bazlı bir cilt işaretleyici ve yer değiştirme takibi için sinir uzunluğuna bağlı olarak PN'nin uzunluğu boyunca ek iki ila dört işaretleyici kullanın (Şekil 5B).
- Veri analizi için PN'nin altına düz bir şekilde bir kalibrasyon ızgarası (yani 0,5 cm x 0,5 cm kareli lamine ızgara) ve 1 cm'lik bir cetvel yerleştirin (Şekil 5B).
- Sıkıştırmadan sonra ve germeden hemen önce PN'nin ilk uzunluğunu kaydedin.
- PN'yi 500 mm/dak'lık bir yer değiştirme hızında arızaya veya önceden belirlenmiş bir esnemeye kadar gerin.

Şekil 5: Periferik sinir gerilmesinin veri alımı için temsili şema. (A) Stereo görüntüleme kamera sistemini bir standa takın ve ardından bir USB Type-C kablosuyla bir dizüstü bilgisayara bağlayın. Stereo görüntüleme kamera sistemini periferik sinirin 6 cm yukarısına kadar yerleştirin. (B) Periferik sinir, distal uçtaki mekanik düzeneğe klemplenir. Mürekkep bazlı bir cilt işaretleyici kullanarak, yerleştirme ve sıkıştırma bölgelerine bir işaretleyici ve sinir uzunluğu boyunca iki ila dört işaretleyici daha yerleştirin. Test öncesinde, sırasında ve sonrasında nemli kalması için periferik sinirin üzerine salin püskürtülür. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
5. Veri analizi-işaretleyici yörünge takibi
- Çıkış video dosyasını (Ek Dosya 7) sol ve sağ kamera video dosyaları (sırasıyla Ek Dosya 8 ve Ek Dosya 9) olmak üzere iki video dosyasına ayırmak için özel MATLAB kodunu (Ek Dosya 6) çalıştırın.
- Tık Koşmak başlatmak için DLTdv7.m22 GUI (Ek Dosya 10).
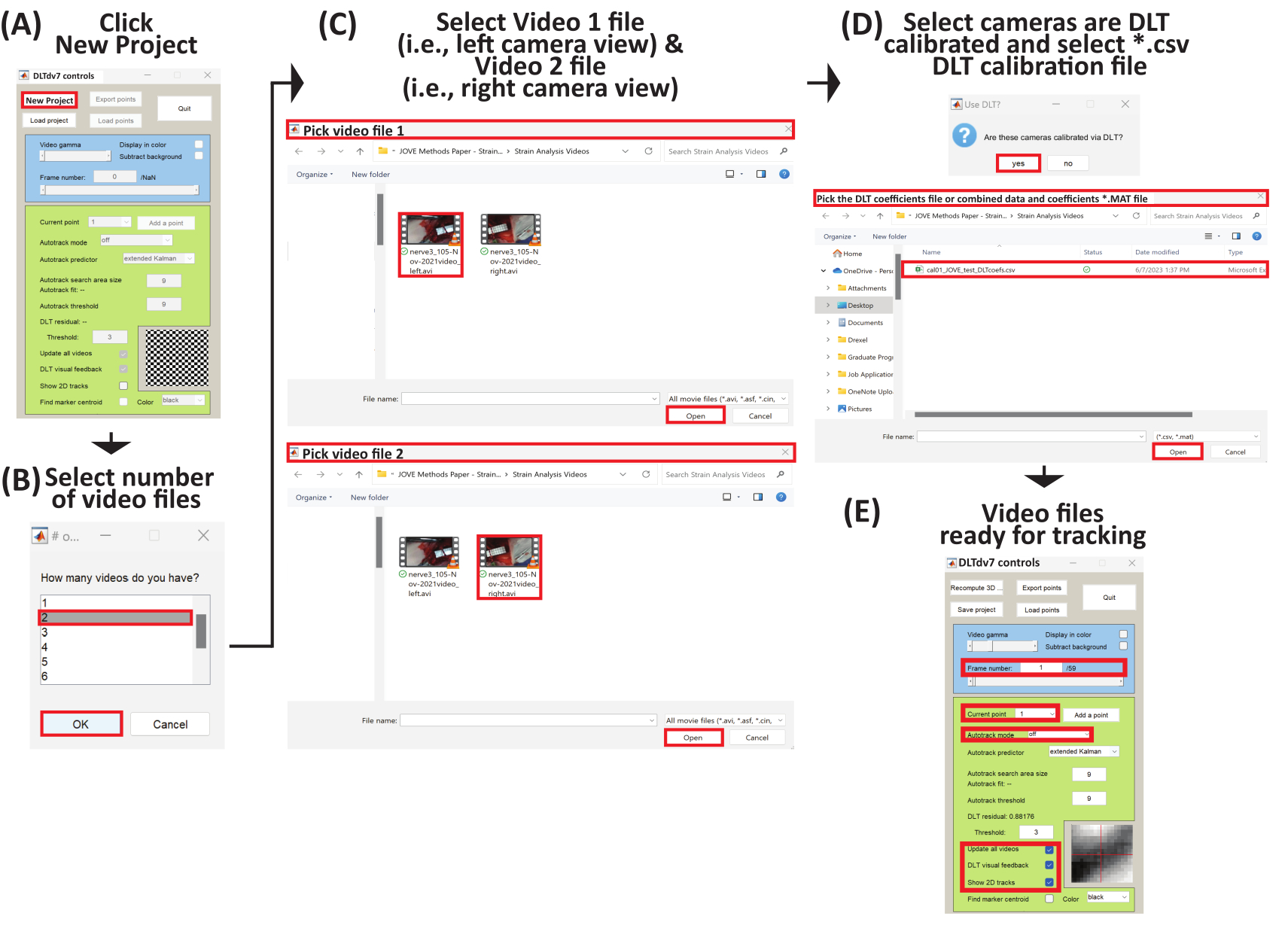
- DLTdv7 denetimleri penceresi açılır ve yeni proje, projeyi yükle ve çık düğmeleri etkinleştirilir (Şekil 6A).
- Yeni bir projeye başlamak için DLTdv7 kontrolleri penceresinde yeni proje'ye tıklayın.
- Bir iletişim kutusu açıldığında, gerilmiş bir periferik sinir üzerindeki yer değiştirme işaretleyici yörüngelerini izlemek için iki video dosyasını (yani sol ve sağ kamera görünümleri) belirtmek için 2'yi seçin (Şekil 6B).
- Sol kamera görünümünden (Ek Dosya 8) video dosyası olan ilk video dosyasını (yani Video 1) seçin ve aç'a tıklayın (Şekil 6C). Ardından, sağ kamera görünümünden (Ek Dosya 9) video dosyası olan ikinci video dosyasını (yani Video 2) seçin ve aç'a tıklayın (Şekil 6C).
- İki video dosyası seçildikten sonra, video dosyalarının DLT aracılığıyla kalibre edilen kamera görünümlerinden alındığını belirtmek için evet'e tıklayın.
- Stereo görüntüleme kamera sistemi için ilgili DLT katsayılarını *.csv dosyasını (Ek Dosya 5) seçin ve aç'a tıklayın (Şekil 6D).
- İlk video kareleri her iki video dosyasından da görüntülenir ve DLTdv7 kontrol penceresinin geri kalanı etkinleştirilir. Yeni proje düğmesi, 3B noktaları yeniden hesapla düğmesiyle değiştirilir ve proje yükle düğmesi, kaydet düğmesiyle değiştirilir (Şekil 6E).
- DLTdv7 kontrolleri penceresinde, kare numarasının 1 olduğundan, geçerli noktanın 1 olarak ayarlandığından, otomatik izleme modunun kapalı olduğundan emin olun ve tüm videoları, DLT görsel geri bildirimini güncelleyin ve 2D parçaları göster kontrol edildi (Şekil 6E).
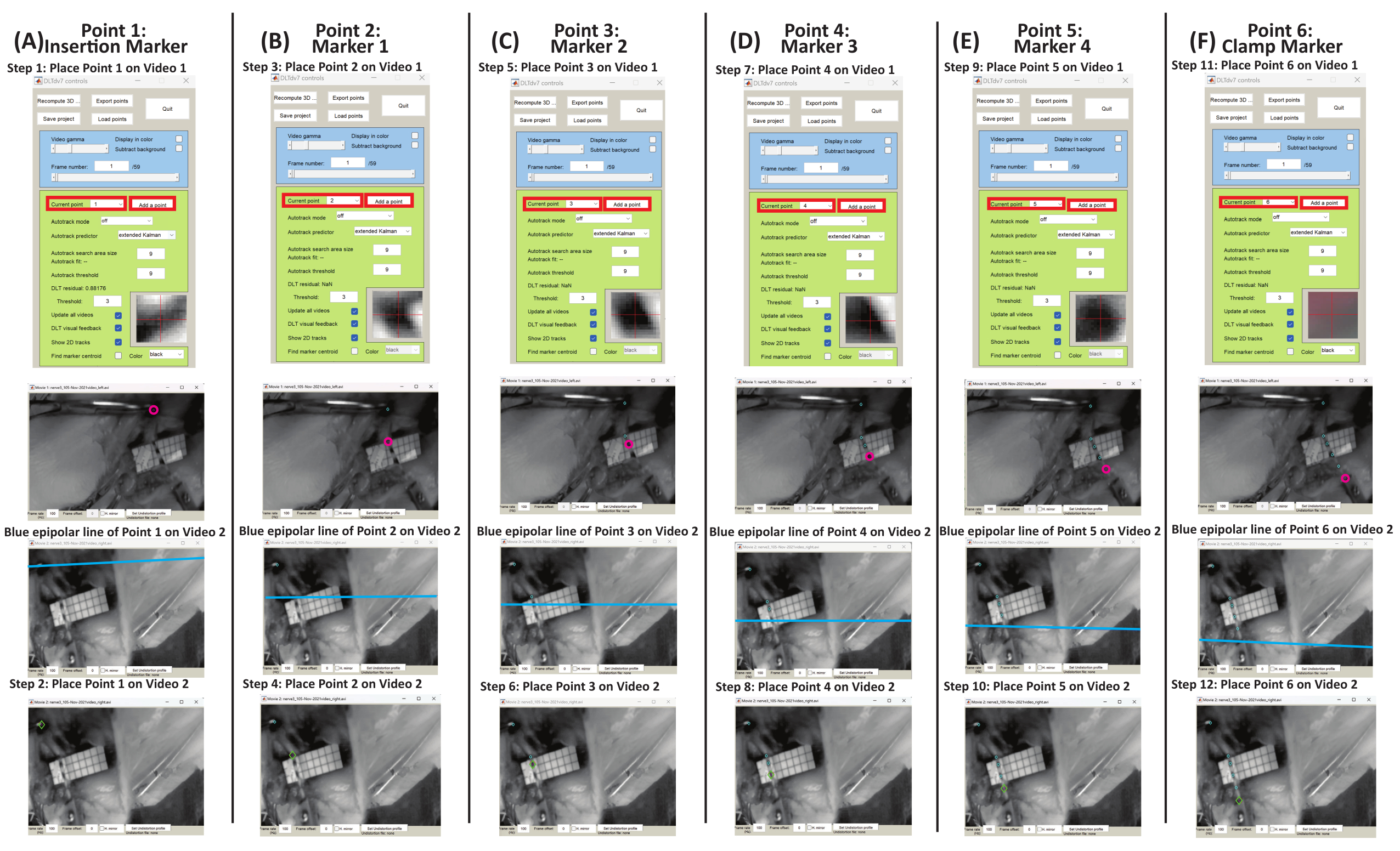
- İzleme noktalarının PN'nin yer değiştirme işaretleyicileri üzerine, yerleştirme işaretleyicisi 1. noktaya, işaretleyici 1 2. noktaya karşılık gelecek ve kelepçe işaretleyicisi son nokta olacak şekilde yerleştirildiğinden emin olun.
- 1. noktayı Video 1'deki ekleme işaretçisine yerleştirin (yani, sol kamera view video file) yerleştirilen noktanın ekleme işaretçisinin merkezinde olduğundan emin olun. Yerleştirilen noktayı ekleme işaretçisinin merkezine taşımak için klavye kısayollarını (Tablo 1) kullanın (Şekil 7A).
- DLT görsel geri bildirimi kontrol edildiğinden, Video 1'e bir nokta yerleştirildiğinde, Video 2'de mavi bir epipolar çizgi belirir (yani, sağ kamera view video dosyası) (Şekil 7). Mavi epipolar çizgiyi referans olarak kullanarak Video 1'deki ekleme işaretçisine 2. noktayı yerleştirin. Yerleştirilen noktayı ekleme işaretçisinin merkezine taşımak için klavye kısayollarını (Tablo 1) gerektiği gibi kullanın (Şekil 7A).
- Yörüngelerini izlemek üzere diğer doku işaretleyicilerine nokta eklemek için DLTdv7 kontrolleri penceresinde nokta ekle'ye tıklayın. Hangi noktanın etkin olduğunu öğrenmek için DLTdv7 kontrolleri penceresindeki geçerli noktaya bakın.
- Nokta ekle'yi tıklayın. 2. noktayı Video 1'deki işaretçi 1'e yerleştirin. Video 2'de 2. noktayı 1. işarete yerleştirmek için mavi epipolar çizgiyi ve klavye kısayollarını kullanın. Yerleştirme ve klemp arasındaki sinirin uzunluğu boyunca tüm yer değiştirme belirteçleri için önce Video 1'de ve ardından Video 2'de (yani son nokta) nokta eklemeye ve yerleştirmeye devam edin (Şekil 7B-F).
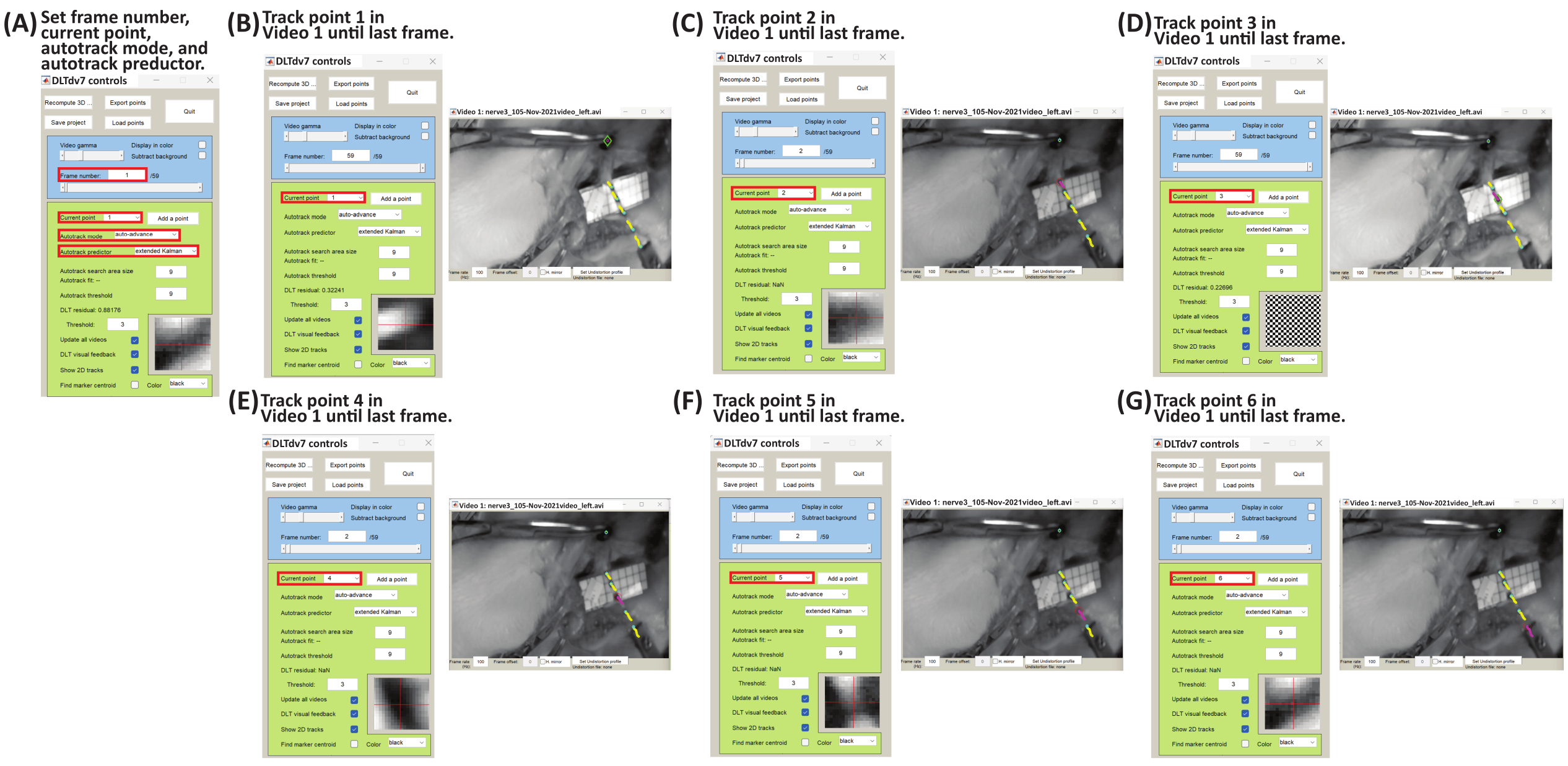
- Tüm başlangıç noktaları Video 1 ve Video 2'ye (yani sırasıyla sol ve sağ kamera video dosyaları) yerleştirildikten sonra, DLTdv7 kontrolleri penceresinde kare numarasının 1 olduğundan ve geçerli noktanın 1 olarak ayarlandığından emin olun.
- DLTdv7 kontrolleri penceresinde, açılır menüden otomatik izleme modunu otomatik ilerleme olarak ve otomatik izleme tahmincisini açılır menüden genişletilmiş Kalman olarak değiştirin (Şekil 8A).
- Önce Video 1'de yerleştirilen tüm noktaların takibini tamamlayın ve ardından Video 2'de izlemeyi tamamlayın. Arızaya (yani, periferik sinirin büyük yırtılmasından önceki kare) veya önceden belirlenmiş esneme için videonun tamamı elde edilene kadar işaretleyicinin ortasına kare kare sol tıklayarak işaretleyici yörüngesini izleyin.
- Video 1'deki 1. noktayı izlemeye başlayın. İzlemenin işaretçinin merkezinde olduğundan emin olmak için istediğiniz gibi yakınlaştırın ve uzaklaştırın (Tablo 1); videonun hatası veya sonuna kadar kare kare tıklayın (Şekil 8B). Video 1'de 1. noktanın takibini tamamladıktan sonra, 1. kareye dönün ve DLTdv7 kontrolleri penceresindeki açılır menüden geçerli noktayı 2. nokta olarak değiştirin. Önceki izlenen nokta açık maviye dönecek ve yörüngesi sarıya dönecektir. Mevcut nokta yeşil bir elmasa ve pembe bir merkeze sahip olacak.
- Videonun arızalanmasına veya sonuna kadar her nokta için kare kare sol tıklayarak Video 1'deki tüm noktaların izlenmesini tamamlayın (Şekil 8C-G).
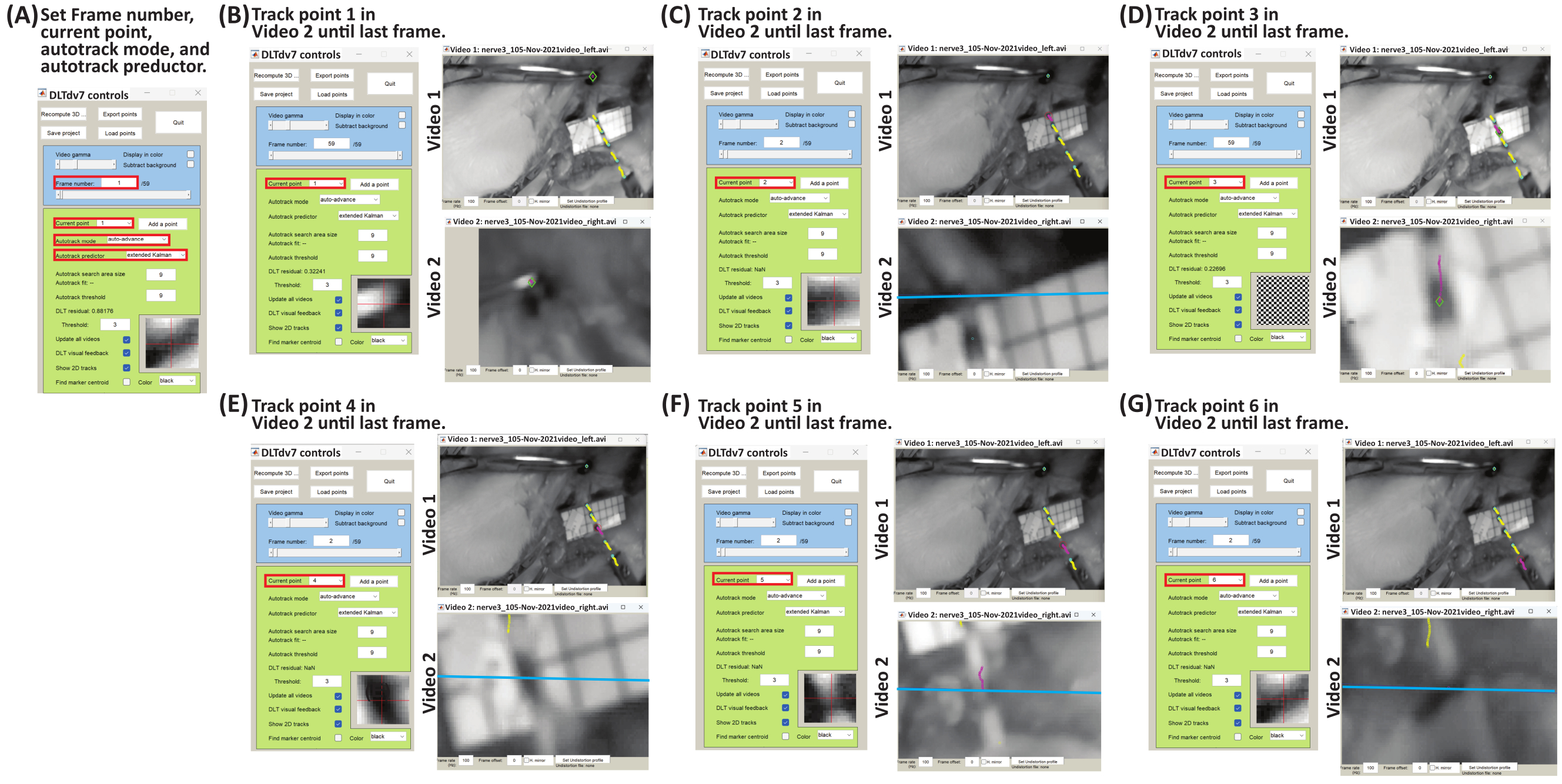
- Video 2'de, Video 1'e referans olarak noktaları izlemek için mavi epipolar çizgiyi kullanın (Şekil 9). DLTdv7 kontrolleri penceresinde, kare numarasını 1'e döndürün ve geçerli noktayı 1 olarak ayarlayın ve Video 2'de nokta 1'in yörüngesini izlemeye başlayın.
- Video 2'de kalan noktaları izlemek için aynı adımları (5.2.16-5.2.18) izleyin.
- Video 1 ve Video 2'de izleme tamamlandıktan sonra, izlenen noktaların (x, y, z) koordinatlarını (mm cinsinden) dışa aktarmak için DLTdv7 kontrolleri penceresinde noktaları dışa aktar'a tıklayın.
- Çıktı dosyalarının kaydedileceği dizini seçmek için bir iletişim kutusu açılır. Dizin konumuna tıklayın.
- Çıktı dosyalarının adını ayarlamak için başka bir iletişim kutusu açılır. Çıktı dosyalarının adını ayarlayın (yani, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- Başka bir diyalog kutusu açılır. Kaydetme biçimini düz olarak seçin.
- Başka bir iletişim kutusu açılır. %95 güven aralığını hesaplamak için hayır'ı seçin.
- Verilerin dışa aktarıldığını ve kaydedildiğini gösteren son bir iletişim kutusu açılır ve dört çıktı dosyası seçilen dizin konumuna (Ek Dosya 11, Ek Dosya 12, Ek Dosya 13 ve Ek Dosya 14) dışa aktarılır.
- Geçerli projeyi (Ek Dosya 15) çıktı dosyalarıyla aynı dizine kaydetmek için DLTdv7 kontrolleri penceresinde projeyi kaydet'e tıklayın.

Şekil 6: Üç boyutlu yörünge izlemeye başlamak için yeni bir proje oluşturmak için şematik. (A) DLTdv7.m22'yi çalıştırın ve yeni bir projeye başlamak için Yeni Proje'ye tıklayın. (B) Video dosyası sayısı olarak 2'yi seçin. (C) Video 1 dosyasını (yani sol kamera görünümü) ve ardından Video 2 dosyasını (yani sağ kamera görünümü) seçin. (D) Video dosyaları DLT kalibre edilmiş bir stereo görüntüleme kamera sisteminden geldiği için evet'i seçin. Ardından, DLT katsayılarını içeren *.csv dosyasını seçin. (E) Seçilen video dosyaları artık izlenmeye hazırdır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
| Tuş/Tıklama | Açıklama |
| Sol Tıklama | Tıklanan karedeki bir noktanın yörüngesini izler |
| (+) Anahtar | Mevcut video karesini arount mosue işaretçisinde yakınlaştırır |
| (-) Anahtar | Geçerli video karesini uzaklaştırır ve işaretçiyi uzaklaştırır |
| (i) Anahtar | Noktayı yukarı taşıma |
| (j) Anahtar | Noktayı sola taşı |
| (k) Anahtar | Noktayı sağa taşı |
| (m) Anahtar | Noktayı aşağı taşıma |
Tablo 1: İzleme noktası yörüngesi için klavye ve fare kısayolları.

Şekil 7: DLTdv7.m22 kullanılarak Video 1 ve Video 2 için doku işaretleyicilerine başlangıç noktaları yerleştirmek için şematik. (A) Geçerli noktayı 1 olarak ayarlayın. Video 1'deki ekleme işaretçisinin üzerine 1. noktayı yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 1. noktayı yerleştirme işaretçisine yerleştirin. (B) Geçerli noktayı 2 olarak ayarlayın. 2. noktayı Video 1'deki işaretçi 1'e yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 2. noktayı işaretçi 1'e yerleştirin. (C) Geçerli noktayı 3 olarak ayarlayın. 3. noktayı Video 1'deki işaretçi 2'ye yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 3. noktayı işaretçi 2'ye yerleştirin. (D) Geçerli noktayı 4 olarak ayarlayın. Video 1'deki işaretçi 3'e 4. noktayı yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 4. noktayı işaretçi 3'e yerleştirin. (E) Geçerli noktayı 5 olarak ayarlayın. 5. noktayı Video 1'deki 4 numaralı işarete yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 5. noktayı işaretçi 4'e yerleştirin. (F) Akım noktasını 6 olarak ayarlayın. 6. noktayı Video 1'deki kelepçe işaretleyicisine yerleştirin. Video 2'deki mavi epipolar çizgiyi kullanarak, 6 noktasını cl'ye yerleştirin.amp işaretleyici. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 8: DLTdv7.m22 kullanılarak Video 1'in işaret noktası yörüngelerini izlemek için şematik. (A) Kare numarasını 1'e, geçerli noktayı 1'e, otomatik izleme modunu otomatik ilerlemeye ve otomatik izleme tahmincisini genişletilmiş Kalman'a ayarlayın. (B) Geçerli noktayı 1 olarak ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak ekleme işaretçisinin (yani nokta 1) yer değiştirmesini izlemeye başlayın. (C) Çerçeve numarasını 1 ve geçerli noktayı 2 olarak ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak işaretçi 1'in (yani nokta 2) yer değiştirmesini izlemeye başlayın. (D) Çerçeve numarasını 1 ve geçerli noktayı 3 olarak ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak işaretçi 2'nin (yani nokta 3) yer değiştirmesini izlemeye başlayın. (E) Çerçeve numarasını 1'e ve geçerli noktayı 4'e ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak işaretçi 3'ün (yani nokta 4) yer değiştirmesini izlemeye başlayın. (F) Çerçeve numarasını 1 ve geçerli noktayı 5 olarak ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak işaretçi 4'ün (yani nokta 5) yer değiştirmesini izlemeye başlayın. (G) Çerçeve numarasını 1 ve geçerli noktayı 6 olarak ayarlayın. Video 1 dosyasında, son kareye kadar kare kare sol tıklayarak kelepçe işaretleyicisinin (yani nokta 6) yer değiştirmesini izlemeye başlayın. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 9: DLTdv7.m22 kullanılarak Video 2'nin işaret noktası yörüngelerini izlemek için şematik. (A) Kare numarasını 1'e, geçerli noktayı 1'e, otomatik izleme modunu otomatik ilerlemeye ve otomatik izleme tahmincisini genişletilmiş Kalman'a ayarlayın. (B) Geçerli noktayı 1 olarak ayarlayın. Video 2 dosyasındaki mavi epipolar çizgiyi kullanarak, son kareye kadar kare kare sol tıklayarak ekleme işaretçisinin (yani nokta 1) yer değiştirmesini izlemeye başlayın. (C) Çerçeve numarasını 1 ve geçerli noktayı 2 olarak ayarlayın. Video 2 dosyasındaki mavi epipolar çizgiyi kullanarak, son kareye kadar kare kare sol tıklayarak işaretçi 1'in (yani nokta 2) yer değiştirmesini izlemeye başlayın. (D) Çerçeve numarasını 1 ve geçerli noktayı 3 olarak ayarlayın. Video 2 dosyasındaki mavi epipolar çizgiyi kullanarak, son kareye kadar kare kare sol tıklayarak işaretçi 2'nin (yani nokta 3) yer değiştirmesini izlemeye başlayın. (E) Çerçeve numarasını 1'e ve geçerli noktayı 4'e ayarlayın. Video 2 dosyasındaki mavi epipolar çizgiyi kullanarak, son kareye kadar kare kare sol tıklayarak işaretçi 3'ün (yani nokta 4) yer değiştirmesini izlemeye başlayın. (F) Çerçeve numarasını 1 ve geçerli noktayı 5 olarak ayarlayın. Video 2 dosyasındaki mavi epipolar çizgiyi kullanarak, son kareye kadar kare kare sol tıklayarak işaretçi 4'ün (yani nokta 5) yer değiştirmesini izlemeye başlayın. (G) Çerçeve numarasını 1 ve geçerli noktayı 6 olarak ayarlayın. Video 2'deki mavi epipolar çizgiyi kullanarak file, son kareye kadar kare kare sol tıklayarak kelepçe işaretleyicisinin (yani nokta 6) yer değiştirmesini izlemeye başlayın. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
6. Veri analizi-gerinim analizi
- İzlenen 3B (x, y, z) işaretçi yörüngelerini (mm cinsinden) içe aktarmak için özel bir MATLAB kodu (Ek Dosya 16) çalıştırın.
- MATLAB komut penceresinde şunu yazın:
yüzdeStrain, deltaLi, lengthNi, dosyaadı] = PercentStrain_3D - Kopma süresini girin, örneğin, video dosyalarında 59 kare varsa, süre 0,59 saniyedir; izlenen noktaların sayısını girin ve izlenen 3B (x, y, z) yörüngeleri (mm cinsinden) ile *_xyzpts.csv dosyasını seçin.
- Çıktı uzunluğuna karşı zamana karşı (Ek Şekil S4), uzunluk ve zamana karşı değişiklik (Ek Şekil S5) ve gerinim ve zaman (Ek Şekil S6) grafiklerini ve *.xls dosyasını zaman, uzunluk, uzunluk değişikliği ve gerinim (Ek Dosya 17) ile kaydetmek için dizini seçin.
- Denklem 1-3'ü kullanarak uzunluğu (l), uzunluktaki değişimi (Δl) ve yüzde gerinimini hesaplayın:
 (1)
(1)
Burada li, herhangi bir zaman noktasında herhangi iki işaret arasındaki mesafedir; x1i, y1i, z1i , iki işaretleyiciden birinin 3B koordinatlarıdır; ve x2i, y2i, z2i , ikinci işaretçilerin 3B koordinatlarıdır. (2)
(2)
Burada li, herhangi bir zaman noktasında herhangi iki işaret arasındaki mesafedir ve lo , orijinal/sıfır zaman noktasında herhangi iki işaret arasındaki mesafedir. (3)
(3)
Burada Δli, herhangi bir zaman noktasında iki işaretçi arasındaki uzunluk değişikliğidir ve lo, orijinal/sıfır zaman noktasında herhangi iki işaretçi arasındaki mesafedir.
Sonuçlar
Açıklanan metodoloji kullanılarak, çeşitli çıktı dosyaları elde edilir. DLTdv7.m *_xyzpts.csv (Ek Dosya 12), gerilmiş PN'nin uzunluğunu, uzunluğundaki değişikliği ve gerinimini hesaplamak için daha fazla kullanılan her zaman diliminde izlenen her noktanın milimetre cinsinden (x, y, z) koordinatlarını içerir. Gerilmiş bir PN'nin temsili uzunluk-zaman, uzunluk-zamandaki değişim ve gerinim-zaman grafikleri Şekil 10'da gösterilmektedir. Gerilmiş PN'nin...
Tartışmalar
Gerilme yaralanması nedeniyle periferik sinirlerin (PN'ler) biyomekanik özelliklerini bildiren çalışmalar değişiklik gösterir ve bu varyasyon, test ekipmanı ve uzama analizi gibi test metodolojilerine atfedilebilir 5,6,7,8,9,10,11,12,13,14,16,24
Açıklamalar
Yazarların açıklanacak herhangi bir çıkar çatışması yoktur.
Teşekkürler
Bu araştırma, Ulusal Sağlık Enstitüleri'nin Eunice Kennedy Shriver Ulusal Çocuk Sağlığı ve İnsan Gelişimi Enstitüsü'nün R15HD093024 ve R01HD104910A numaralı Ödül ve 1752513 numaralı NSF KARİYER Ödülü kapsamında finanse edilmesiyle desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
Referanslar
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır