Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Прямое линейное преобразование для измерения деформации периферических нервов in situ во время растяжения
В этой статье
Резюме
Этот протокол реализует систему стереокамер, откалиброванную с использованием прямого линейного преобразования для захвата трехмерных смещений in-situ растянутых периферических нервов. Захватывая эти смещения, можно определить деформацию, вызванную при различной степени растяжения, что информирует о пороговых значениях травм при растяжении, которые могут продвинуть науку о восстановлении нервов, зависящих от растяжения.
Аннотация
Периферические нервы подвергаются физиологическому и нефизиологическому растяжению во время развития, нормального движения суставов, травм, а в последнее время и во время хирургического вмешательства. Понимание биомеханической реакции периферических нервов на растяжение имеет решающее значение для понимания их реакции на различные условия нагрузки и, таким образом, для оптимизации стратегий лечения и хирургических вмешательств. В этом протоколе подробно описан процесс калибровки стереокамеры с помощью прямого линейного преобразования и отслеживания трехмерного смещения периферических нервов в тканях in-situ во время растяжения, полученного из трехмерных координат видеофайлов, захваченных откалиброванной стереокамерой.
По полученным трехмерным координатам можно рассчитать длину нерва, изменение длины нерва и процент деформации по времени для растянутого периферического нерва. Использование стереокамеры обеспечивает неинвазивный метод захвата трехмерных смещений периферических нервов при растяжении. Прямое линейное преобразование позволяет трехмерно реконструировать длину периферических нервов во время растяжения для измерения деформации. В настоящее время не существует методологии для изучения деформации растянутых периферических нервов in situ с использованием стереокамеры, откалиброванной с помощью прямого линейного преобразования. Учет деформации периферических нервов in situ при растяжении может не только помочь клиницистам в понимании основных механизмов повреждения нервов при чрезмерном растяжении, но и помочь оптимизировать стратегии лечения, основанные на вмешательствах, вызванных растяжением. Методология, описанная в статье, может улучшить наше понимание биомеханики периферических нервов в ответ на растяжение для улучшения результатов лечения пациентов в области лечения и реабилитации при повреждении нервов.
Введение
Периферические нервы (ПН) подвергаются растяжению во время развития, роста, нормальной подвижности суставов, травм и хирургических операций1. ПН проявляют вязкоупругие свойства для защиты нерва при регулярных движениях 2,3 и поддержания структурного здоровья его нервных волокон2. Поскольку было показано, что реакция ПН на механическое растяжение зависит от типа повреждения нервных волокон4, повреждений прилегающих соединительных тканей 2,4 и подходов к тестированию (т.е. скорости или направления нагрузки)5,6,7,8,9,10,11,12,13,14важно различать биомеханические реакции ПН при нормальном диапазоне движений от нефизиологического диапазона как при медленном, так и при быстром растяжении. Это может способствовать пониманию механизма повреждения ПН в ответ на растяжение и помочь в своевременном и оптимизированном вмешательстве 1,4,15,16. В физиотерапии наблюдается растущая тенденция к оценке и вмешательству на основе взаимосвязи между физиологией нервов и биомеханикой. Понимая различия в биомеханике ПН при различных прикладываемых нагрузках, физиотерапевты могут быть лучше подготовлены к модификации текущих вмешательств17.
Имеющиеся биомеханические данные ПН в ответ на растяжение остаются непостоянными и могут быть отнесены к испытательному оборудованию и процедурам, а также различиям в анализе данных удлинения 5,6,7,8,9,10,11,12,13,14,16. Кроме того, измерение трехмерного (3D) смещения нерва in situ остается плохо описанным в доступной в настоящее время литературе. В предыдущих исследованиях использовались методы стереовизуализации для максимальной точности 3D-реконструкции смещения тканей капсул фасеточных суставов18,19. Метод прямого линейного преобразования (DLT) позволяет преобразовывать два или более двумерных (2D) вида в 3D-координаты реального мира (т.е. в мм)20,21,22. DLT обеспечивает высокоточный метод калибровки для систем стереоизображений, поскольку он позволяет точно реконструировать 3D-положения с учетом искажений объектива, параметров камеры и координат изображения, а также обеспечивает гибкость при настройке стереокамер 20,21,22. Исследования с использованием откалиброванных DLT стереокамер обычно используются для изучения локомоции и анализа походки22,23. Этот протокол призван предложить подробную методологию для определения деформации ПН in situ при различной степени растяжения с использованием откалиброванной DLT системы стереокамер и программного обеспечения для слежения с открытым исходным кодом22.
протокол
Все описанные процедуры были одобрены Комитетом по уходу за животными и их использованию (IACUC) Университета Дрекселя. Неонатальный поросенок был приобретен на ферме, одобренной Министерством сельского хозяйства США (USDA), расположенной в Пенсильвании, США.
1. Настройка системы стереоизображения
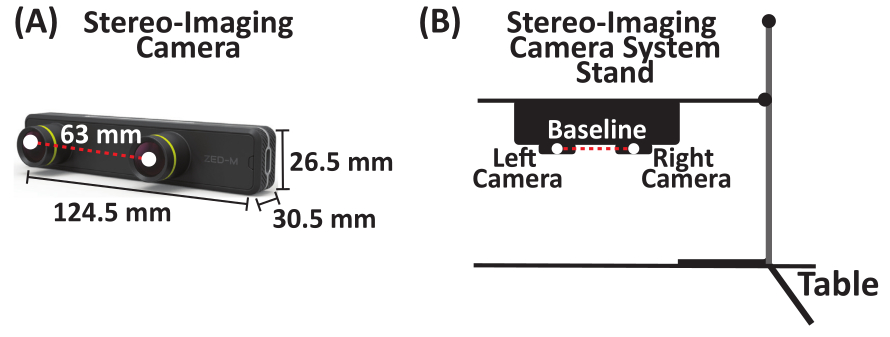
- Прикрепите стереокамеру, которая снимает до 100 кадров в секунду (FPS), к подставке. Система стереокамер, используемая в этом исследовании, представляет собой пассивную стереокамеру с двумя горизонтально выровненными камерами (называемыми левой и правой камерами), разделенными базовой линией 63 мм (рис. 1).

Рисунок 1: Система стереокамер . (A) Параллельная система стереокамер с двумя камерами (левая и правая камеры), разделенными базовой линией 63 мм. (B) Схема системы стереокамер и установки стойки. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
2. Система стереовизуализации DLT Калибровка-оцифровка громкости 3D управления
- Получите три прозрачных квадратных листа акрилового плексигласа (12 дюймов x 12 дюймов x 0,125 дюйма). На каждом листе поместите сетку и нарисуйте не менее 10 точек, в результате чего минимум 30 точек будут распределены по объему 3D-управления в плоскостях координат x, y и z. Постройте объем 3D-управления, сложив три листа на разной высоте, чтобы захватить максимальную высоту того, что будет записано (рис. 2A).
- Оцифруйте все точки на громкости 3D управления с помощью дигитайзера с ножной педалью. Получение координат x, y и z (в мм) (рис. 2B) путем установления начала координат (0, 0, 0) на 3D-кубе управления, определения положительных направлений x и y, открытия документа для сохранения оцифрованных (x, y, z) координат (в мм) каждой точки и сохранения координат (x, y, z) (в мм) в виде файла *.csv.
ПРИМЕЧАНИЕ: Координаты (x, y, z) относятся к заданному началу координат в 3D-кубе управления. - Используйте эти оцифрованные координаты (x, y, z) (в мм) для калибровки левой и правой камер стереокамеры соответственно.

Рисунок 2: Трехмерное управление громкостью и дигитайзер с ножной педалью. (A) Схема 3D регулировки громкости. (B) Компоненты дигитайзера с ножной педалью используются для оцифровки 3D управления объемом для получения координат (x, y, z) в мм. Сокращение: 3D = трехмерный. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
3. Калибровка системы стереокамер - генерация коэффициентов прямого линейного преобразования
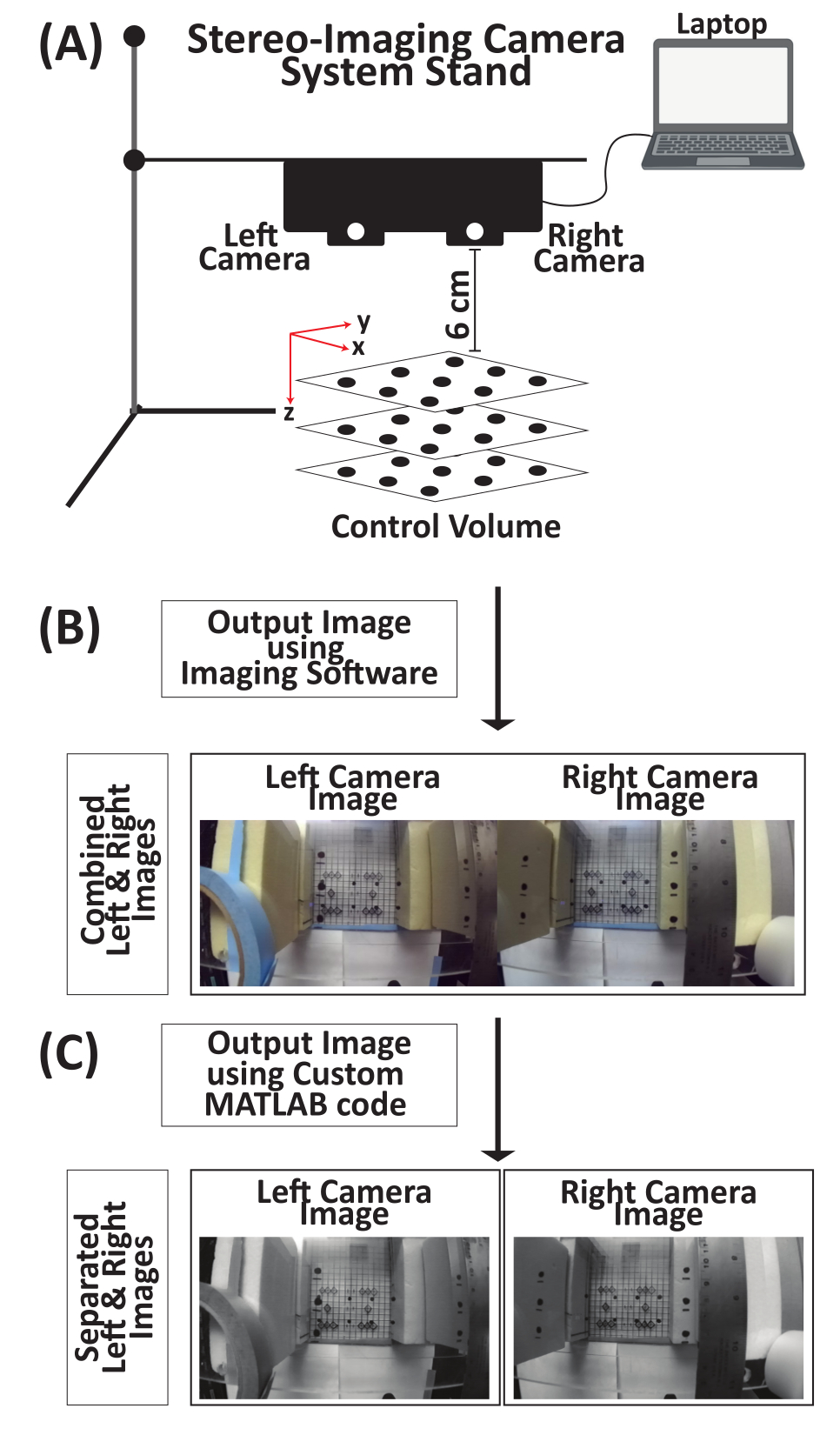
- Прикрепите стереокамеру к подставке (рис. 3A).
- Расположите стереокамеру на расстоянии 6 см выше громкости 3D-регулятора (рис. 3A).
- Подключите стереокамеру к ноутбуку с помощью кабеля USB type-C.
- Откройте программное обеспечение для обработки изображений (см. Таблицу материалов).
- Визуализируйте объем 3D-управления. Выходное изображение (дополнительный рисунок S1) включает в себя как левый, так и правый вид камеры (рисунок 3B).
- Запустите пользовательский код MATLAB (дополнительный файл 1), чтобы разделить выходное изображение на два изображения, левое и правое изображения соответственно (рисунок 3C, дополнительные рисунки S2 и дополнительные рисунки S3 соответственно).
- Нажмите кнопку «Выполнить», чтобы инициализировать графический интерфейс DLTcal5.m22 (дополнительный файл 2).
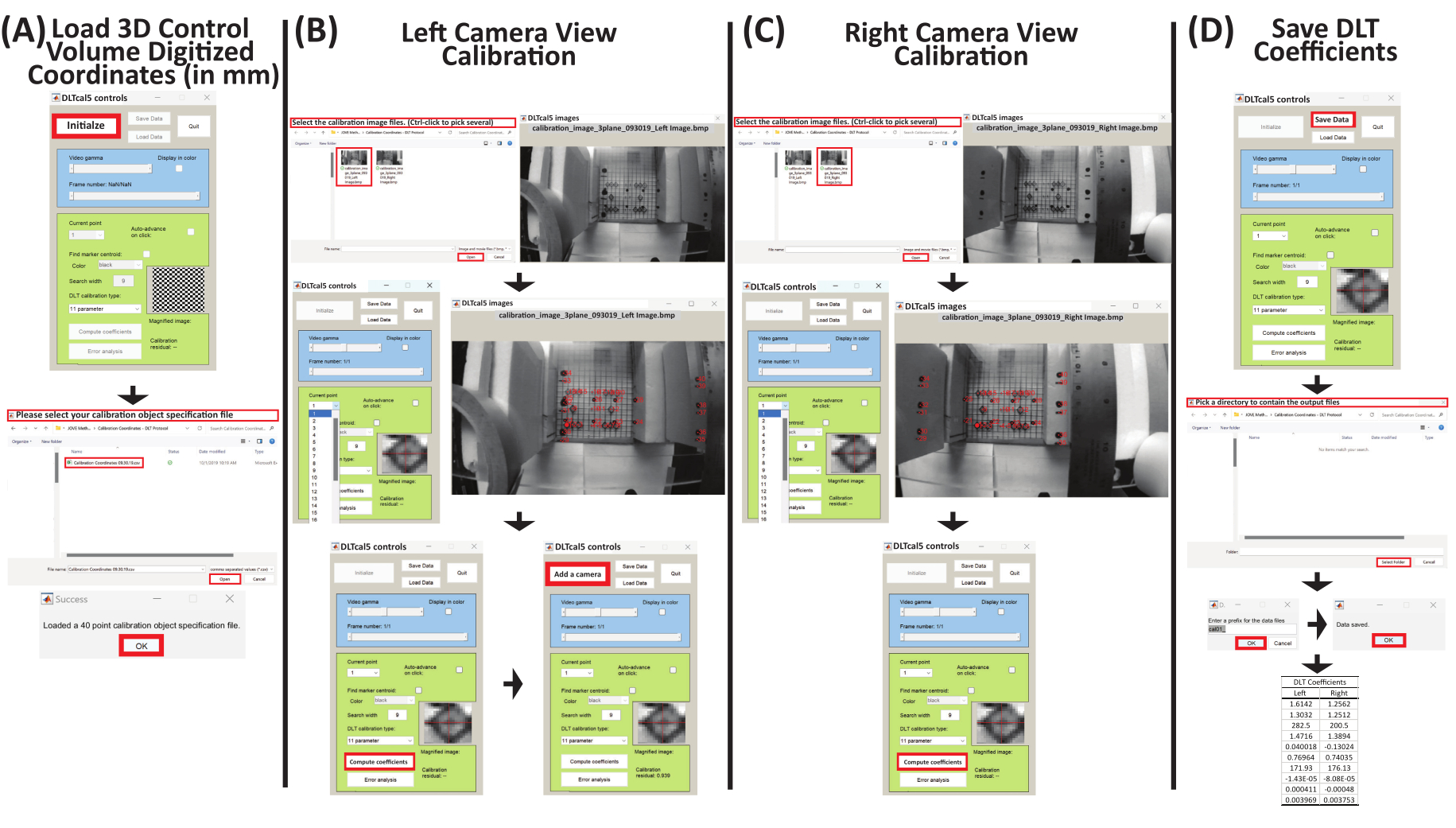
- Нажмите кнопку «Инициализировать» в окне элементов управления DLTcal5 , чтобы выбрать файл *.csv с оцифрованными (x, y, z) координатами (в мм) (рисунок 4A и дополнительный файл 3).
- Выберите соответствующее изображение регулировки громкости 3D на первом снимке стереокамеры (дополнительный рисунок S2). Для этой системы стереокамер вид с левой камеры соответствует виду с первой камеры (рис. 4B).
- Появляется первое изображение с камеры (т.е. вид с левой камеры).
- Выберите точки в порядке их оцифровки в разделе 2, чтобы получить координаты 2D-пикселей с левого вида камеры (рис. 4B).
- Установите текущую точку в окне DLTcal5 Controls и нажмите на соответствующую текущую точку на загруженном изображении первого вида камеры (т.е. вида левой камеры).
- После выбора всех точек на загруженном первом виде камеры нажмите кнопку «Вычислить коэффициенты », чтобы получить 11 коэффициентов DLT для вида с левой камеры (рис. 4B).
- Нажмите кнопку «Добавить камеру» в окне элементов управления DLTcal5 и повторите шаги 3.7.2-3.7.6, чтобы сгенерировать 11 коэффициентов DLT для правого вида камеры (т. е. второго вида камеры) (рисунок 4B, C и дополнительный рисунок S3).
- Нажмите кнопку "Сохранить данные " в окне управления DLTcal5 , чтобы выбрать папку, в которой будут сохранены выходные файлы (рисунок 4D).
- Выходные файлы включают координаты 2D (x, y) пикселей (Дополнительный файл 4) и соответствующие 11 коэффициентов DLT для левого и правого видов камеры стереокамеры (Рисунок 4D и Дополнительный файл 5).
- Система стереокамер откалибрована.

Рисунок 3: Схема получения трехмерного управляющего объема с помощью стереокамеры для прямой калибровки линейного преобразования. (A) Прикрепите стереокамеру к подставке, а затем подключите ее к ноутбуку с помощью кабеля USB type-C. Поместите регулятор громкости 3D на расстоянии 6 см под системой стереокамеры. (B) С помощью программного обеспечения для обработки изображений сделайте изображение 3D-объема управления. Выходное изображение представляет собой объединенное изображение с левой и правой камер. (C) С помощью пользовательского кода MATLAB объединенное выходное изображение разделяется на отдельные левое и правое изображения 3D-регуляторного объема. Сокращение: 3D = трехмерный. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}

Рисунок 4: Схема для генерации коэффициентов прямого линейного преобразования для левого и правого видов камеры системы визуализации стереокамеры. (A) Запустите DLTcal5.m22, нажмите кнопку «Инициализировать » в окне управления и выберите файл *.csv с оцифрованными (x, y, z) координатами (в мм) объема 3D-управления. (B) Выберите калибровочное изображение для вида с левой камеры. Затем выберите точки на изображении в том же порядке, в котором они были оцифрованы. Затем нажмите кнопку Вычислить коэффициенты , чтобы создать коэффициенты DLT для вида с левой камеры. Затем нажмите « Добавить камеру », чтобы повторить шаги для правого вида камеры. (C) Выберите калибровочное изображение для правого вида камеры. Затем выберите точки на изображении в том же порядке, в котором они были оцифрованы. Затем нажмите кнопку « Вычислить коэффициенты », чтобы создать коэффициенты DLT для правого вида камеры. (D) Нажмите «Сохранить данные », чтобы выбрать каталог для сохранения коэффициентов DLT для левого и правого видов камеры. Введите имя выходного файла и нажмите OK , и коэффициенты DLT будут сохранены в виде файла *.csv. Сокращение: 3D = трехмерное и DLT = прямое линейное преобразование. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
4. Сбор данных
- Поместите обезболенного новорожденного йоркширского поросенка (в возрасте 3-5 дней) в положение лежа на спине, отведя верхние конечности, чтобы обнажить подмышечную область. Сделайте разрез по средней линии через кожу и фасцию, прилегающую к трахее, вплоть до верхней трети грудины.
- Используйте тупое рассечение, чтобы обнажить нервы плечевого сплетения.
- Распылите солевой раствор на открытый нерв плечевого сплетения, чтобы сохранить гидратацию до, во время и после тестирования.
- Разрежьте дистальный конец плечевого сплетения PN и прижмите к механическим испытательным аппаратам.
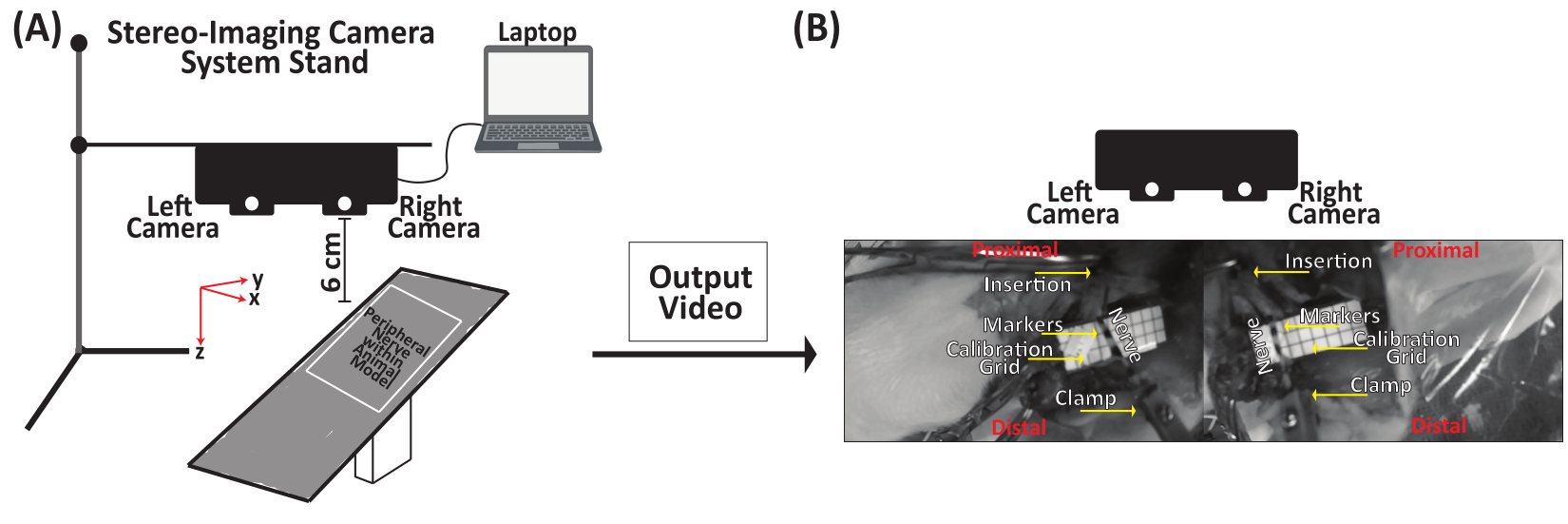
- Прикрепите стереокамеру к подставке, разместите ее на высоте до 6 см над растягиваемым PN, а затем подключите стереокамеру к ноутбуку с помощью кабеля USB Type-C (рис. 5A).
- Используйте кожный маркер на основе чернил для размещения маркеров на местах введения и зажима, а также дополнительные два-четыре маркера по длине ПН в зависимости от длины нерва для отслеживания смещения (рис. 5B).
- Поместите калибровочную сетку (т. е. ламинированную сетку с квадратами 0,5 см x 0,5 см) и линейку 1 см под PN для анализа данных (рис. 5B).
- Запишите начальную длину PN после зажима и непосредственно перед растяжением.
- Растягивайте PN со скоростью смещения 500 мм/мин до разрушения или заданного растяжения.

Рисунок 5: Репрезентативная схема для сбора данных о растяжении периферических нервов. (A) Прикрепите стереокамеру к подставке, а затем подключите ее к ноутбуку с помощью кабеля USB type-C. Разместите стереокамеру на расстоянии до 6 см над периферическим нервом. (B) Периферический нерв зажимается к механической установке на дистальном конце. Используя кожный маркер на основе чернил, поместите маркер на места введения и зажима и еще два-четыре маркера по длине нерва. Физиологический раствор впрыскивается на периферический нерв для поддержания его гидратации до, во время и после тестирования. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
5. Анализ данных - отслеживание траектории маркера
- Запустите пользовательский код MATLAB (Supplemental File 6), чтобы разделить выходной видеофайл (Supplemental File 7) на два видеофайла: видеофайлы левой и правой камеры (Supplemental File 8 и Supplemental File 9 соответственно).
- Щелчок Бежать для инициализации DLTdv7.m22 Графический интерфейс пользователя (Дополнительный файл 10).
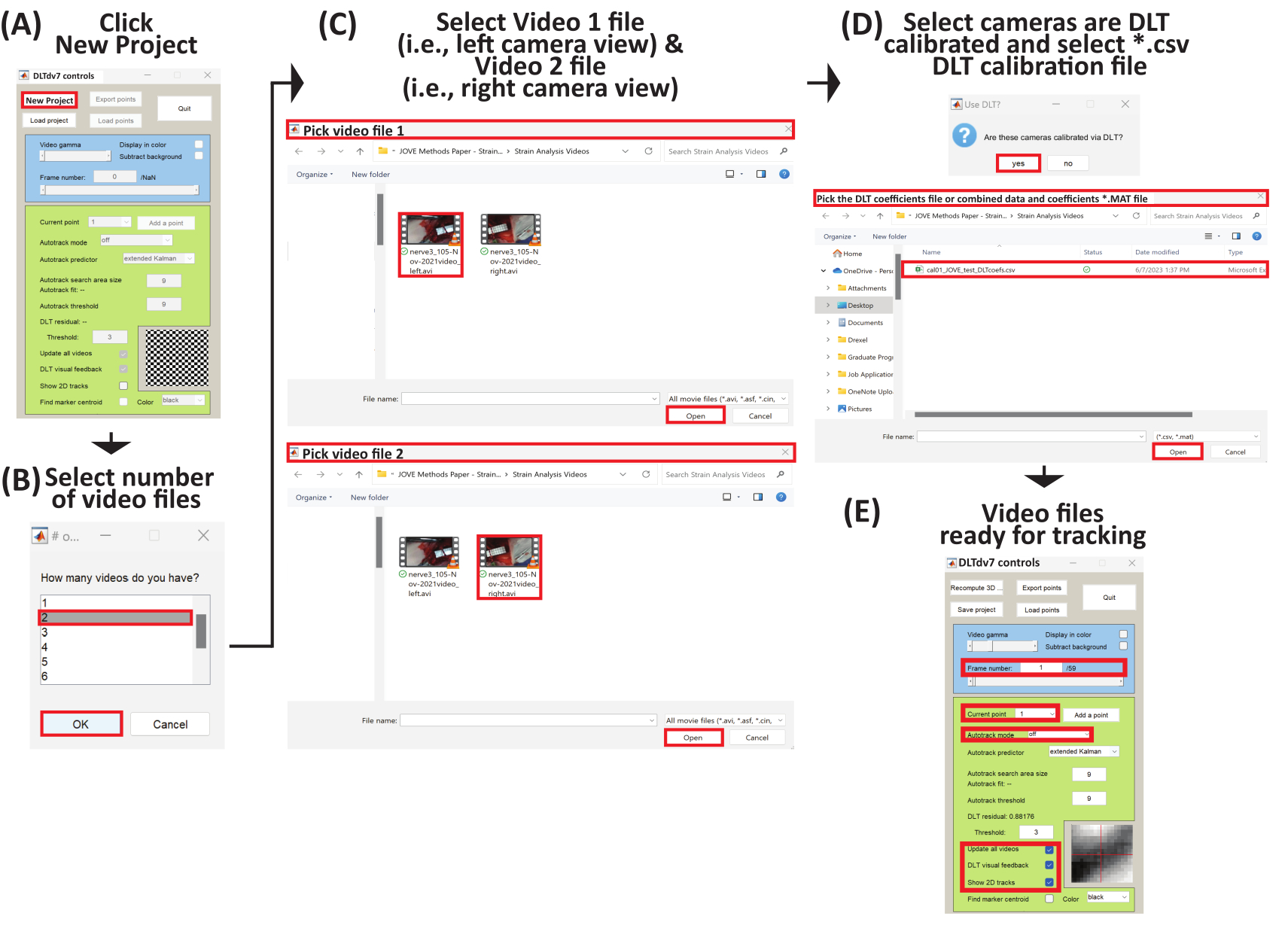
- Появится всплывающее окно элементов управления DLTdv7, в котором будут включены кнопки «Новый проект», «Загрузить проект» и «Выйти из него» (рис. 6A).
- Нажмите кнопку «Создать проект» в окне элементов управления DLTdv7 , чтобы начать новый проект.
- Когда появится диалоговое окно, выберите 2 , чтобы указать два видеофайла (т. е. вид левой и правой камеры) для отслеживания траекторий маркера смещения на растянутом периферическом нерве (рис. 6B).
- Выберите первый видеофайл (т.е. Видео 1), который является видеофайлом с левого вида камеры (Дополнительный файл 8), и нажмите «Открыть » (Рисунок 6C). Затем выберите второй видеофайл (т. е. Видео 2), который является видеофайлом с правой камеры (Дополнительный файл 9), и нажмите «Открыть » (Рисунок 6C).
- После выбора двух видеофайлов нажмите «Да », чтобы указать, что видеофайлы были получены с камер, откалиброванных с помощью DLT.
- Выберите соответствующие коэффициенты DLT *.csv файл (Дополнительный файл 5) для системы стереокамер и нажмите кнопку «Открыть » (Рисунок 6D).
- Исходные видеокадры отображаются из обоих видеофайлов, а остальная часть окна управления DLTdv7 активируется. Кнопка «Новый проект » заменена на кнопку «Пересчитать 3D-точки », а кнопка «Загрузить проект » заменена на кнопку «Сохранить » (рисунок 6E).
- В окне элементов управления DLTdv7 убедитесь, что номер кадра равен 1, текущая точка установлена на 1, режим автослежения выключен, и обновите все видео, визуальная обратная связь DLT и отображение 2D-дорожек установлены (рис. 6E).
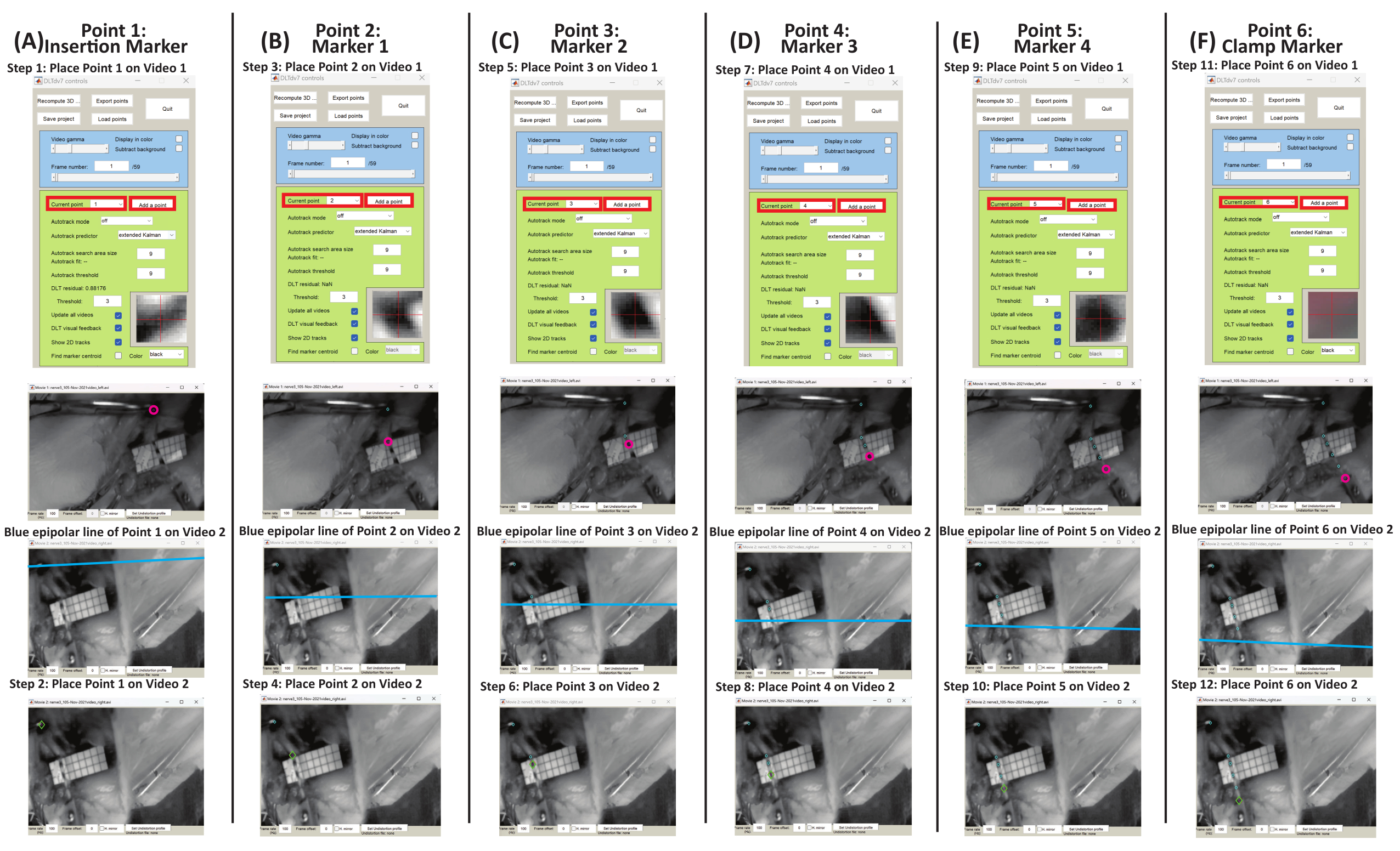
- Убедитесь, что точки слежения расположены на маркерах смещения PN таким образом, чтобы маркер вставки соответствовал точке 1, маркер 1 соответствовал точке 2 и т. д., при этом маркер зажима является конечной точкой.
- Поместите точку 1 на маркер вставки на видео 1 (т. е. на видеофайле с видом левой камеры), убедившись, что размещенная точка находится в центре маркера вставки. С помощью сочетаний клавиш (Таблица 1) переместите размещенную точку в центр маркера вставки (Рисунок 7A).
- Поскольку визуальная обратная связь DLT проверяется, при размещении точки на видео 1 на видео 2 (т. е. видеофайле с правой камеры) появляется синяя эпиполярная линия (рис. 7). Поместите точку 1 на маркер вставки на видео 2, используя синюю эпиполярную линию в качестве эталона. При необходимости используйте сочетания клавиш (Таблица 1), чтобы переместить размещенную точку к центру маркера вставки (Рисунок 7A).
- Нажмите кнопку «Добавить точку» в окне элементов управления DLTdv7 , чтобы добавить точки на других маркерах тканей для отслеживания их траекторий. Обратитесь к текущей точке в окне элементов управления DLTdv7 , чтобы узнать, какая точка активна.
- Нажмите кнопку Добавить точку. Поместите точку 2 на маркер 1 на видео 1. Используйте синюю эпиполярную линию и сочетания клавиш, чтобы поместить точку 2 на маркер 1 на видео 2. Продолжайте складывать и расставлять точки, сначала на видео 1, а затем на видео 2, для всех маркеров смещения по длине нерва между введением и зажимом (т.е. конечная точка) (рис. 7B-F).
- После того, как все начальные точки размещены в Видео 1 и Видео 2 (т. е. в видеофайлах левой и правой камеры соответственно), убедитесь, что номер кадра равен 1 , а текущая точка установлена на 1 в окне управления DLTdv7 .
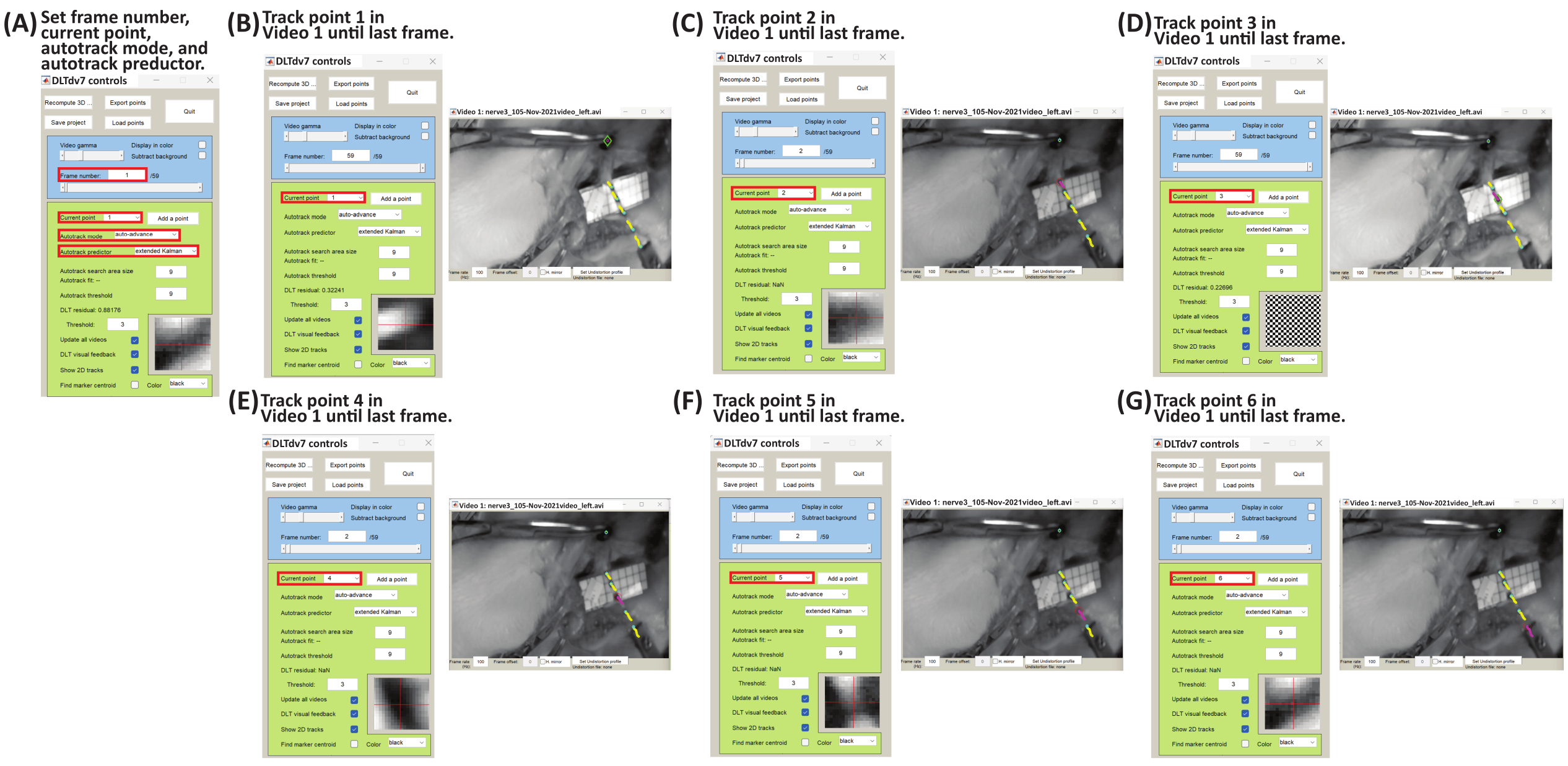
- В окне элементов управления DLTdv7 измените режим автослежения на автопереход из выпадающего меню и предиктор автослежения на расширенный Калман из выпадающего меню (рис. 8A).
- Сначала завершите отслеживание всех размещенных точек в Видео 1 , а затем завершите отслеживание в Видео 2. Отслеживайте траекторию маркера, щелкая левой кнопкой мыши по центру маркера кадр за кадром до тех пор, пока не будет достигнут провал (т.е. кадр до полного разрыва периферического нерва) или всего видео для заданного растяжения.
- Начните отслеживание точки 1 на видео 1. При необходимости увеличивайте и уменьшайте масштаб (Таблица 1), чтобы убедиться, что отслеживание находится в центре маркера; нажимайте кадр за кадром до отказа или окончания видео (рисунок 8B). После завершения слежения за точкой 1 на видео 1 вернитесь к кадру 1 и измените текущую точку на точку 2 из выпадающего меню на окне управления DLTdv7 . Предыдущая отслеживаемая точка станет светло-голубой, а ее траектория — желтой. Текущая точка будет иметь зеленый ромб и розовый центр.
- Завершите отслеживание всех точек на видео 1, щелкая левой кнопкой мыши кадр за кадром для каждой точки до отказа или окончания видео (рис. 8C-G).
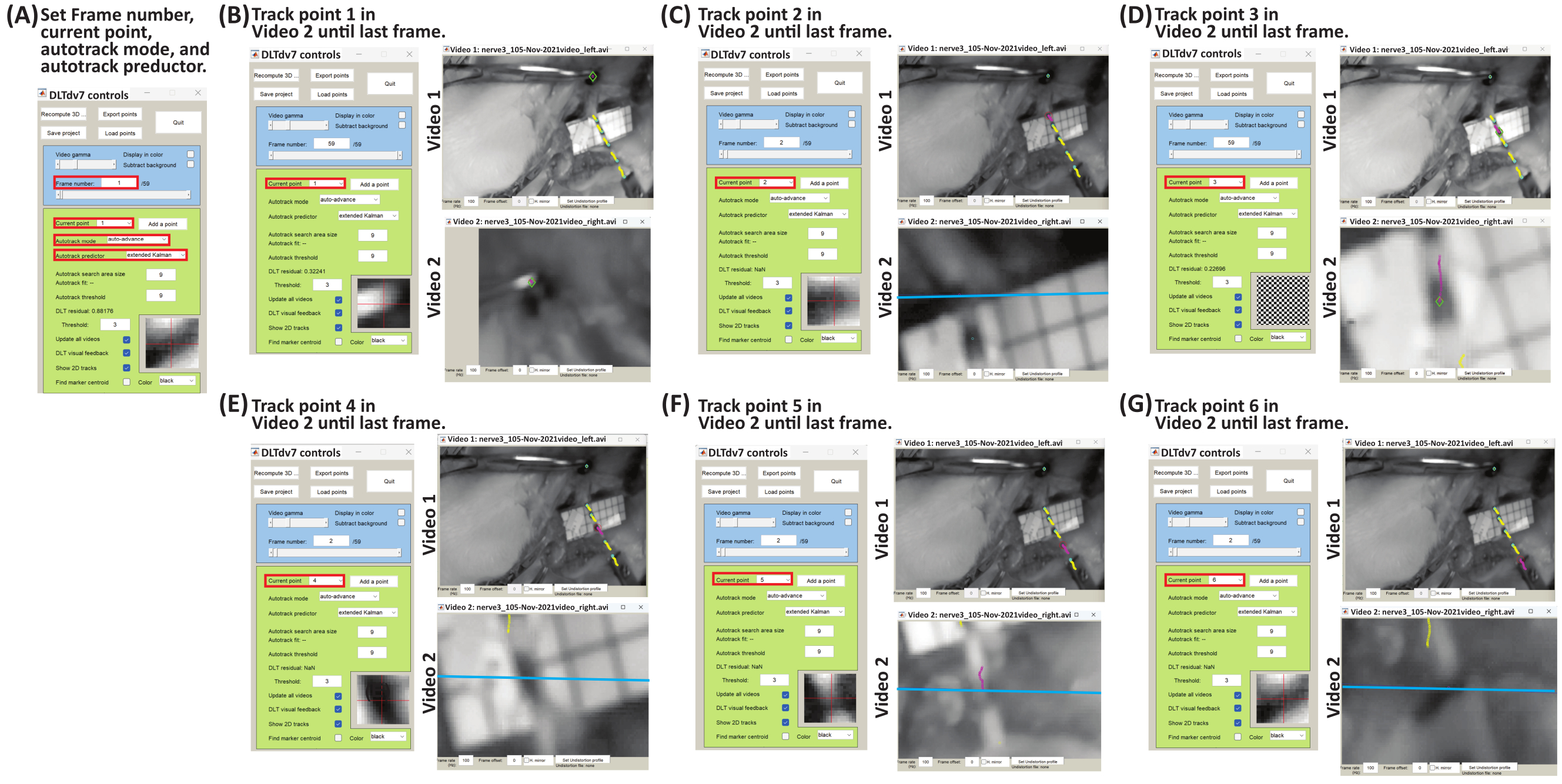
- На видео 2 используйте синюю эпиполярную линию для отслеживания точек относительно видео 1 (рисунок 9). В окне управления DLTdv7 верните номер кадра в 1 и установите текущую точку в 1, а затем начните отслеживание траектории точки 1 в видео 2.
- Выполните те же шаги (5.2.16-5.2.18), чтобы отследить оставшиеся точки в Видео 2.
- После завершения отслеживания в Видео 1 и Видео 2 нажмите кнопку Экспорт точек в окне управления DLTdv7 , чтобы экспортировать координаты (x, y, z) (в мм) отслеживаемых точек.
- Появится диалоговое окно для выбора каталога, в котором будут сохранены выходные файлы. Нажмите на расположение каталога.
- Появляется еще одно диалоговое окно для установки имен выходных файлов. Задайте имя выходных файлов (например, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- Появляется еще одно диалоговое окно. Выберите формат сохранения как плоский.
- Появится еще одно диалоговое окно. Выберите «нет», чтобы рассчитать 95% доверительный интервал.
- Появляется последнее диалоговое окно, в котором показано, что данные экспортированы и сохранены, а четыре выходных файла экспортированы в выбранное расположение каталога (Дополнительный файл 11, Дополнительный файл 12, Дополнительный файл 13 и Дополнительный файл 14).
- Нажмите кнопку "Сохранить проект " в окне элементов управления DLTdv7 , чтобы сохранить текущий проект (дополнительный файл 15) в том же каталоге, что и выходные файлы.

Рисунок 6: Схема для настройки нового проекта, чтобы начать отслеживание трехмерной траектории. (A) Запустите DLTdv7.m22 и нажмите кнопку Новый проект , чтобы начать новый проект. (B) Выберите 2 в качестве количества видеофайлов. (C) Выберите файл Video 1 (т. е. вид с левой камеры), а затем выберите Video 2 file (т. е. вид с правой камеры). (D) Выберите «Да », так как видеофайлы поступают с откалиброванной стереокамеры DLT. Затем выберите файл *.csv, содержащий коэффициенты DLT. (E) Выбранные видеофайлы теперь готовы к отслеживанию. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
| Клавиша/Щелчок | Описание |
| Щелчок левой кнопкой мыши | Траектория траектории точки в кадре, по которой кликнули |
| (+) Ключ | Увеличивает текущий видеокадр в указателе |
| (-) Ключ | Увеличивает текущий кадр видео по указателю mosue |
| (i) Ключ | Переместить точку вверх |
| j) Ключ | Переместить точку влево |
| k) Ключ | Переместить точку вправо |
| m) Ключ | Переместить точку вниз |
Таблица 1: Сочетания клавиш и мыши для траектории точки слежения.

Рисунок 7: Схема размещения начальных точек на маркерах тканей для Видео 1 и Видео 2 с помощью DLTdv7.m22. (A) Установите текущую точку равной 1. Поместите точку 1 на маркер вставки на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 1 на маркер введения. (B) Установите текущую точку на 2. Поместите точку 2 на маркер 1 на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 2 на маркер 1. (C) Установите текущее значение 3. Поместите точку 3 на маркер 2 на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 3 на маркер 2. (D) Установите текущую точку на 4. Поместите точку 4 на маркер 3 на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 4 на маркер 3. (E) Установите текущее значение 5. Поместите точку 5 на маркер 4 на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 5 на маркер 4. (F) Установите текущую точку на 6. Поместите точку 6 на маркер зажима на видео 1. Используя синюю эпиполярную линию на видео 2, поместите точку 6 на маркер зажима. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}

Рисунок 8: Схема отслеживания траекторий маркерных точек Видео 1 с помощью DLTdv7.m22. (A) Установите номер кадра равным 1, текущую точку равным 1, режим автослежения — автопродвижением, а автотрек-предиктор — расширенным Калманом. (B) Установите текущую точку равной 1. В файле Video 1 начните отслеживать смещение маркера вставки (т.е. точки 1), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (C) Установите номер кадра на 1 и текущую точку на 2. В файле Video 1 начните отслеживание смещения маркера 1 (т.е. точки 2), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (D) Установите номер кадра на 1 и текущую точку на 3. В файле Video 1 начните отслеживание смещения маркера 2 (т.е. точки 3), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (E) Установите номер кадра на 1 и текущую точку на 4. В файле Video 1 начните отслеживание смещения маркера 3 (т.е. точки 4), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (F) Установите номер кадра на 1 и текущую точку на 5. На файле Video 1 начните отслеживание смещения маркера 4 (т.е. точки 5), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (G) Установите номер кадра на 1 и текущую точку на 6. В файле Видео 1 начните отслеживание смещения маркера зажима (т.е. точки 6), кликая левой кнопкой мыши кадр за кадром до последнего кадра. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}

Рисунок 9: Схема траектории маркерных точек видео 2 с помощью DLTdv7.m22. (A) Установите номер кадра на 1, текущую точку на 1, режим автослежения на автопродвижение, а автотрек предиктора на расширенный Калман. (B) Установите текущую точку равной 1. Используя синюю эпиполярную линию в файле Video 2 , начните отслеживать смещение маркера вставки (т.е. точки 1), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (C) Установите номер кадра на 1 и текущую точку на 2. Используя синюю эпиполярную линию на файле Video 2 , начните отслеживать смещение маркера 1 (т.е. точки 2), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (D) Установите номер кадра на 1 и текущую точку на 3. Используя синюю эпиполярную линию на файле Video 2 , начните отслеживать смещение маркера 2 (т.е. точки 3), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (E) Установите номер кадра на 1 и текущую точку на 4. Используя синюю эпиполярную линию на файле Video 2 , начните отслеживать смещение маркера 3 (т.е. точки 4), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (F) Установите номер кадра на 1 и текущую точку на 5. Используя синюю эпиполярную линию в файле Video 2 , начните отслеживать смещение маркера 4 (т.е. точки 5), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. (G) Установите номер кадра на 1 и текущую точку на 6. Используя синюю эпиполярную линию на файле Video 2 , начните отслеживать смещение маркера зажима (т.е. точки 6), щелкая левой кнопкой мыши кадр за кадром до последнего кадра. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
6. Анализ данных - деформационный анализ
- Запустите пользовательский код MATLAB (Дополнительный файл 16) для импорта отслеживаемых траекторий 3D-маркеров (x, y, z) (в мм).
- В командном окне MATLAB введите:
percentStrain, deltaLi, lengthNi, filename] = PercentStrain_3D - Введите время разрыва, например, если в видеофайлах 59 кадров, то время равно 0,59 с; введите количество отслеживаемых точек, и выберите файл *_xyzpts.csv, с отслеживаемыми 3D (x, y, z) траекториями (в мм).
- Выберите каталог для сохранения графиков зависимости длины от времени (дополнительный рисунок S4), изменения длины в зависимости от времени (дополнительный рисунок S5) и зависимости деформации от времени (дополнительный рисунок S6), а также файл *.xls со временем, длиной, изменением длины и деформацией (дополнительный файл 17).
- Рассчитайте длину (l), изменение длины (Δl) и процент деформации, используя уравнения 1-3:
 (1)
(1)
Где li— расстояние между любыми двумя маркерами в любой момент времени; x1i, y1i, z1i — 3D координаты одного из двух маркеров; и x2i, y2i, z2i — 3D координаты вторых маркеров. (2)
(2)
Где li— расстояние между любыми двумя маркерами в любой момент времени, а lo — расстояние между любыми двумя маркерами в исходной/нулевой точке времени. (3)
(3)
Где Δli— изменение длины между двумя маркерами в любой момент времени, а lo— расстояние между любыми двумя маркерами в исходной/нулевой точке времени.
Результаты
С помощью описанной методики получаются различные выходные файлы. DLTdv7.m *_xyzpts.csv (Supplemental File 12) содержит координаты (x, y, z) в миллиметрах каждой отслеживаемой точки на каждом временном интервале, которые в дальнейшем используются для вычисления длины, изменения длины и деформации ?...
Обсуждение
Исследования, сообщающие о биомеханических свойствах периферических нервов (ПН) из-за растяжения, варьируются, и эти различия могут быть связаны с методологиями тестирования, такими как испытательное оборудование и анализ удлинения 5,6,7,8,9,10,11,12,13,14,16,24 <...
Раскрытие информации
У авторов нет конфликта интересов, который можно было бы раскрыть.
Благодарности
Это исследование было поддержано финансированием Национального института детского здоровья и развития человека имени Юнис Кеннеди Шрайвер Национальных институтов здравоохранения под названием Award Number R15HD093024 и R01HD104910A и NSF CAREER Award Award Number 1752513.
Материалы
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
Ссылки
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеThis article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены