É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
Transformação linear direta para a medição da tensão nervosa periférica in-situ durante o alongamento
Neste Artigo
Resumo
Este protocolo implementa um sistema de câmera de imagem estéreo calibrado usando transformação linear direta para capturar deslocamentos tridimensionais in situ de nervos periféricos alongados. Ao capturar esses deslocamentos, a tensão induzida em vários graus de estiramento pode ser determinada informando os limiares de lesão por estiramento que podem avançar na ciência do reparo nervoso dependente do estiramento.
Resumo
Os nervos periféricos sofrem alongamento fisiológico e não fisiológico durante o desenvolvimento, movimento normal das articulações, lesão e, mais recentemente, durante o reparo cirúrgico. Compreender a resposta biomecânica dos nervos periféricos ao alongamento é fundamental para a compreensão de sua resposta a diferentes condições de carga e, portanto, para otimizar estratégias de tratamento e intervenções cirúrgicas. Este protocolo descreve em detalhes o processo de calibração do sistema de câmeras de imagem estéreo via transformação linear direta e o rastreamento do deslocamento tridimensional do tecido in-situ dos nervos periféricos durante o alongamento, obtido a partir de coordenadas tridimensionais dos arquivos de vídeo capturados pelo sistema de câmera de imagem estéreo calibrado.
A partir das coordenadas tridimensionais obtidas, o comprimento do nervo, a mudança no comprimento do nervo e a porcentagem de tensão em relação ao tempo podem ser calculados para um nervo periférico esticado. O uso de um sistema de câmera de imagem estéreo fornece um método não invasivo para capturar deslocamentos tridimensionais de nervos periféricos quando esticados. A transformação linear direta permite reconstruções tridimensionais do comprimento do nervo periférico durante o alongamento para medir a tensão. Atualmente, não existe metodologia para estudar a deformação in situ de nervos periféricos esticados usando um sistema de câmera de imagem estéreo calibrado por meio de transformação linear direta. Capturar a tensão in-situ dos nervos periféricos quando esticados pode não apenas ajudar os médicos a entender os mecanismos subjacentes de lesão de danos nos nervos quando esticados demais, mas também ajudar a otimizar as estratégias de tratamento que dependem de intervenções induzidas por alongamento. A metodologia descrita no artigo tem o potencial de melhorar nossa compreensão da biomecânica dos nervos periféricos em resposta ao alongamento para melhorar os resultados dos pacientes no campo do gerenciamento e reabilitação de lesões nervosas.
Introdução
Os nervos periféricos (NPs) sofrem alongamento durante o desenvolvimento, crescimento, movimento normal das articulações, lesão e cirurgia1. Os NPs exibem propriedades viscoelásticas para proteger o nervo durante movimentos regulares 2,3 e manter a saúde estrutural de suas fibras nervosas2. Como a resposta do NP ao estiramento mecânico demonstrou depender do tipo de dano às fibras nervosas4, lesões nos tecidos conjuntivos adjacentes 2,4 e abordagens de teste (ou seja, taxa ou direção de carga)5,6,7,8,9,10,11,12,13,14 , é essencial distinguir as respostas biomecânicas dos NPs durante a amplitude normal de movimento versus a amplitude não fisiológica nas taxas de estiramento lento e rápido. Isso pode aprofundar a compreensão do mecanismo de lesão da NP em resposta ao alongamento e auxiliar na intervenção oportuna e otimizada 1,4,15,16. Tem havido uma tendência crescente na fisioterapia de avaliar e intervir com base na relação entre fisiologia nervosa e biomecânica17. Ao compreender as diferenças na biomecânica da NP em várias cargas aplicadas, os fisioterapeutas podem estar mais bem preparados para modificar as intervenções atuais17.
Os dados biomecânicos disponíveis de NPs em resposta ao alongamento permanecem variáveis e podem ser atribuídos a equipamentos e procedimentos de teste e diferenças na análise de dados de alongamento 5,6,7,8,9,10,11,12,13,14,16. Além disso, a medição do deslocamento do nervo in-situ tridimensional (3D) permanece mal descrita na literatura atualmente disponível. Estudos anteriores usaram técnicas de imagem estéreo para maximizar a precisão da reconstrução 3D do deslocamento do tecido das cápsulas articulares facetárias18,19. A técnica de transformação linear direta (DLT) permite a conversão de duas ou mais visualizações bidimensionais (2D) em coordenadas 3D do mundo real (ou seja, em mm) 20 , 21 , 22 . O DLT fornece um método de calibração de alta precisão para sistemas de câmeras de imagem estéreo porque permite a reconstrução precisa de posições 3D, levando em conta a distorção da lente, os parâmetros da câmera e as coordenadas da imagem, e permite flexibilidade na configuração da câmera de imagem estéreo 20,21,22. Estudos usando sistemas de câmeras de imagem estéreo calibrados por DLT são normalmente usados para estudar a análise de locomoção e marcha22,23. Este protocolo visa oferecer uma metodologia detalhada para determinar a deformação in-situ de NPs em vários graus de estiramento usando um sistema de câmera de imagem estéreo calibrado por DLT e um software de rastreamento de código aberto22.
Protocolo
Todos os procedimentos descritos foram aprovados pelo Comitê Institucional de Cuidados e Uso de Animais da Universidade Drexel (IACUC). O leitão neonatal foi adquirido de uma fazenda aprovada pelo Departamento de Agricultura dos Estados Unidos (USDA) localizada na Pensilvânia, EUA.
1. Configuração do sistema de imagem estéreo
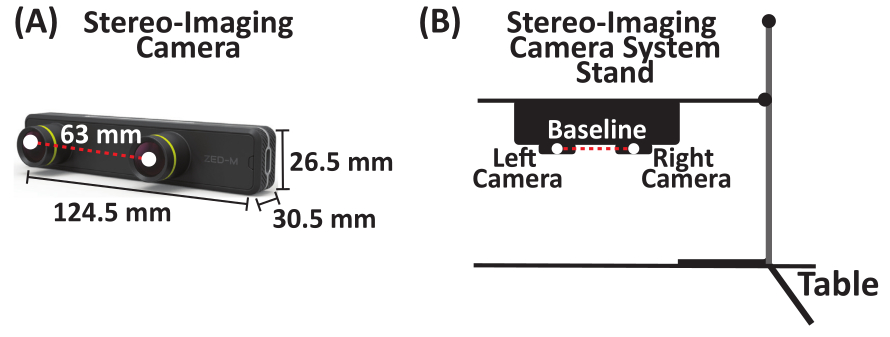
- Conecte um sistema de câmera de imagem estéreo que captura até 100 quadros / s (FPS) a um suporte de utilidade. O sistema de câmera de imagem estéreo usado neste estudo é uma câmera estéreo passiva com duas câmeras alinhadas horizontalmente (chamadas de câmeras esquerda e direita) separadas por uma linha de base de 63 mm (Figura 1).

Figura 1: Sistema de câmera de imagem estéreo. (A) Sistema de câmera de imagem estéreo paralela com duas câmeras (câmeras esquerda e direita) separadas por uma linha de base de 63 mm. (B) Esquema do sistema de câmera de imagem estéreo e configuração do suporte. Clique aqui para ver uma versão maior desta figura.
{kind=link}
2. Sistema de imagem estéreo DLT Calibração - digitalização do volume de controle 3D
- Obtenha três folhas quadradas de acrílico transparente de plexiglass (12 pol x 12 pol x 0,125 pol). Em cada folha, coloque uma grade e desenhe pelo menos 10 pontos, resultando em um mínimo de 30 pontos distribuídos pelo volume de controle 3D nos planos de coordenadas x, y e z. Construa o volume de controle 3D empilhando as três folhas em alturas variadas para capturar a altura máxima do que será gravado (Figura 2A).
- Digitalize todos os pontos no volume de controle 3D usando um digitalizador com pedal. Adquira as coordenadas x, y e z (em mm) (Figura 2B) estabelecendo a origem (0, 0, 0) no cubo de controle 3D, definindo as direções x e y positivas, abrindo um documento para salvar as coordenadas digitalizadas (x, y, z) (em mm) de cada ponto e salvando as coordenadas (x, y, z) (em mm) como um arquivo *.csv.
NOTA: As coordenadas (x, y, z) são relativas à origem definida no cubo de controle 3D. - Use essas coordenadas digitalizadas (x, y, z) (em mm) para calibrar as câmeras esquerda e direita do sistema de câmera de imagem estéreo, respectivamente.

Figura 2: Volume de controle tridimensional e digitalizador com pedal. (A) Esquema do volume de controle 3D. (B) Componentes do digitalizador com pedal usado para digitalizar o volume de controle 3D para obter as coordenadas (x, y, z) em mm. Abreviatura: 3D = tridimensional. Clique aqui para ver uma versão maior desta figura.
{kind=link}
3. Calibração do sistema de câmera de imagem estéreo - geração de coeficientes de transformação linear direta
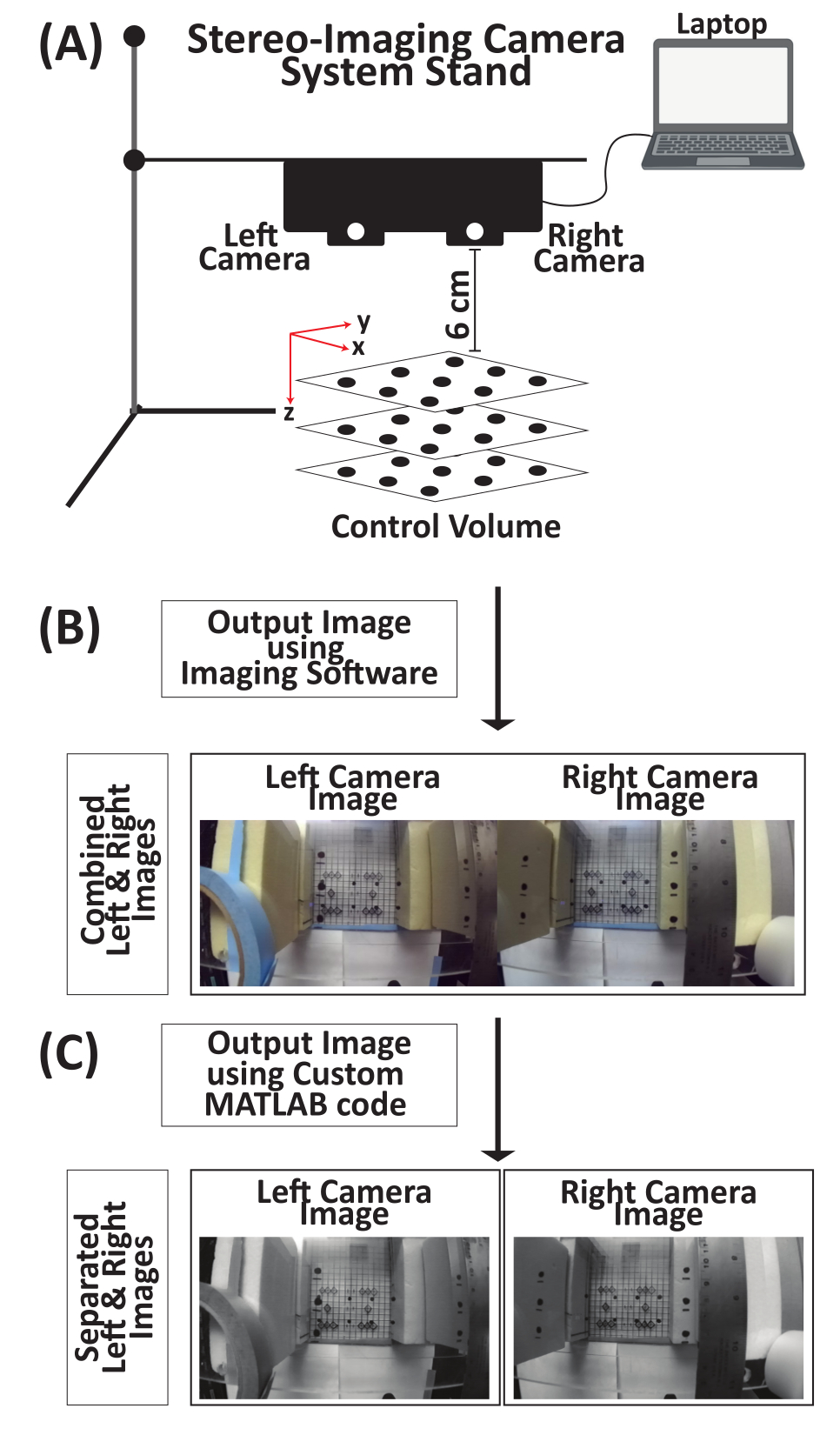
- Conecte o sistema de câmera de imagem estéreo a um suporte de utilitários (Figura 3A).
- Posicione o sistema de câmera de imagem estéreo 6 cm acima do volume de controle 3D (Figura 3A).
- Conecte o sistema de câmera de imagem estéreo a um laptop por meio de um cabo USB tipo C.
- Abra o software de imagem (consulte a Tabela de Materiais).
- Imagem do volume de controle 3D. A imagem de saída (Figura Suplementar S1) inclui as visualizações da câmera esquerda e direita (Figura 3B).
- Execute o código MATLAB personalizado (Supplemental File 1) para separar a imagem de saída em duas imagens, imagens esquerda e direita, respectivamente (Figura 3C, Figuras Suplementares S2 e Figuras Suplementares S3, respectivamente).
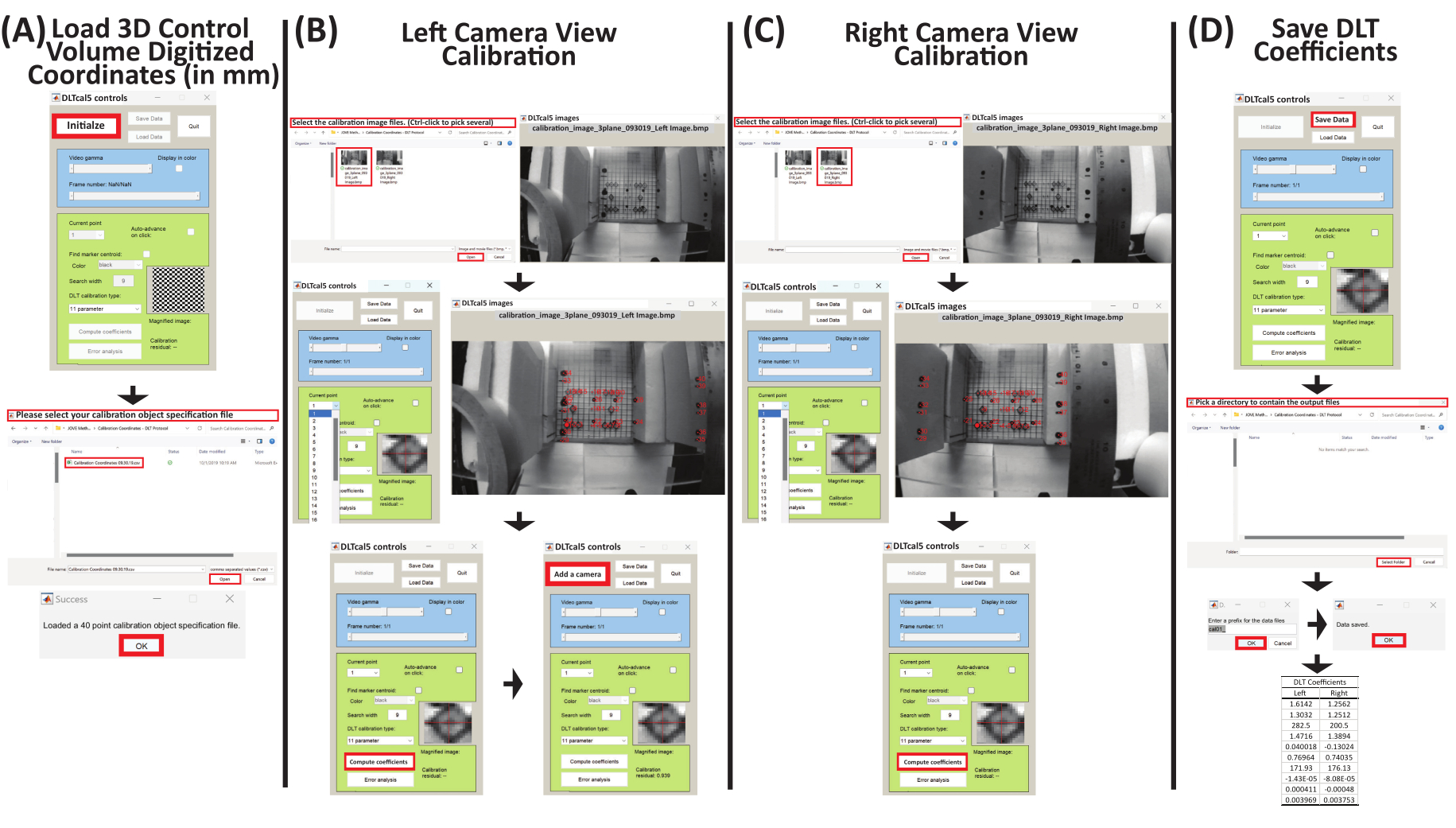
- Clique em Executar para inicializar a GUI 22 do DLTcal5.m (Arquivo Suplementar 2).
- Clique em inicializar na janela de controles DLTcal5 para selecionar o arquivo *.csv com as coordenadas digitalizadas (x, y, z) (em mm) (Figura 4A e Arquivo Suplementar 3).
- Selecione a imagem correspondente do volume de controle 3D na primeira visualização do sistema de câmera de imagem estéreo (Figura Suplementar S2). Para este sistema de câmera de imagem estéreo, a visão esquerda da câmera corresponde à primeira visão da câmera (Figura 4B).
- A primeira imagem de visualização da câmera (ou seja, a visualização da câmera esquerda) aparece.
- Selecione os pontos na ordem em que os pontos foram digitalizados na Seção 2 para obter as coordenadas de pixel 2D da visualização da câmera esquerda (Figura 4B).
- Defina o ponto atual na janela Controles DLTcal5 e clique no ponto atual correspondente na primeira imagem carregada da câmera view (ou seja, esquerda view da câmera).
- Depois de selecionar todos os pontos na primeira visualização da câmera carregada, clique em calcular coeficientes para gerar os 11 coeficientes DLT para a visualização da câmera esquerda (Figura 4B).
- Clique em adicionar uma câmera na janela de controles DLTcal5 e repita as etapas 3.7.2 a 3.7.6 para gerar os 11 coeficientes DLT para a visualização correta da câmera (ou seja, segunda visualização da câmera) (Figura 4B, C e Figura Suplementar S3).
- Clique em salvar dados na janela de controles DLTcal5 para selecionar a pasta onde os arquivos de saída serão salvos (Figura 4D).
- Os arquivos de saída incluem as coordenadas de pixel 2D (x, y) (Arquivo Suplementar 4) e os 11 coeficientes DLT correspondentes para as visualizações de câmera esquerda e direita do sistema de câmera de imagem estéreo (Figura 4D e Arquivo Suplementar 5).
- O sistema de câmera de imagem estéreo é calibrado.

Figura 3: Esquema para adquirir uma imagem do volume de controle tridimensional usando um sistema de câmera de imagem estéreo para calibração de transformação linear direta. (A) Conecte o sistema de câmera de imagem estéreo a um suporte e, em seguida, conecte-o a um laptop por meio de um cabo USB tipo C. Coloque o volume do controle 3D 6 cm sob o sistema de câmera de imagem estéreo. (B) Usando o software de imagem, tire uma imagem do volume de controle 3D. A imagem de saída é uma imagem combinada das câmeras esquerda e direita. (C) Usando um código MATLAB personalizado, a imagem de saída combinada é separada em imagens individuais esquerda e direita do volume de controle 3D. Abreviatura: 3D = tridimensional. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4: Esquema para gerar coeficientes de transformação linear direta para visualizações de câmera esquerda e direita de um sistema de imagem de câmera estéreo. (A) Execute DLTcal5.m22, clique em inicializar na janela de controles e selecione o arquivo *.csv com as coordenadas digitalizadas (x, y, z) (em mm) do volume de controle 3D. (B) Selecione a imagem de calibração da câmera esquerda view. Em seguida, selecione os pontos na imagem na mesma ordem em que foram digitalizados. Em seguida, clique em calcular coeficientes para gerar os coeficientes DLT para a visualização da câmera à esquerda. Em seguida, clique em Adicionar câmera para repetir as etapas para a visualização correta da câmera. (C) Selecione a imagem de calibração da câmera direita view. Em seguida, selecione os pontos na imagem na mesma ordem em que foram digitalizados. Em seguida, clique em calcular coeficientes para gerar os coeficientes DLT para a visualização correta da câmera. (D) Clique em Salvar dados para selecionar o diretório para salvar os coeficientes DLT para as visualizações da câmera esquerda e direita. Insira o nome do arquivo de saída e clique em OK e os coeficientes DLT serão salvos como um arquivo *.csv. Abreviatura: 3D = tridimensional e DLT = transformação linear direta. Clique aqui para ver uma versão maior desta figura.
{kind=link}
4. Aquisição de dados
- Coloque o leitão Yorkshire neonatal anestesiado (3-5 dias de idade) em decúbito dorsal com os membros superiores em abdução para expor a região axilar. Faça uma incisão na linha média através da pele e da fáscia que cobre a traqueia até o terço superior do esterno.
- Use dissecção romba para expor os nervos do plexo braquial.
- Esguiche solução salina no nervo do plexo braquial exposto para mantê-los hidratados antes, durante e após o teste.
- Corte a extremidade distal de um plexo braquial NP e prenda ao aparelho de teste mecânico.
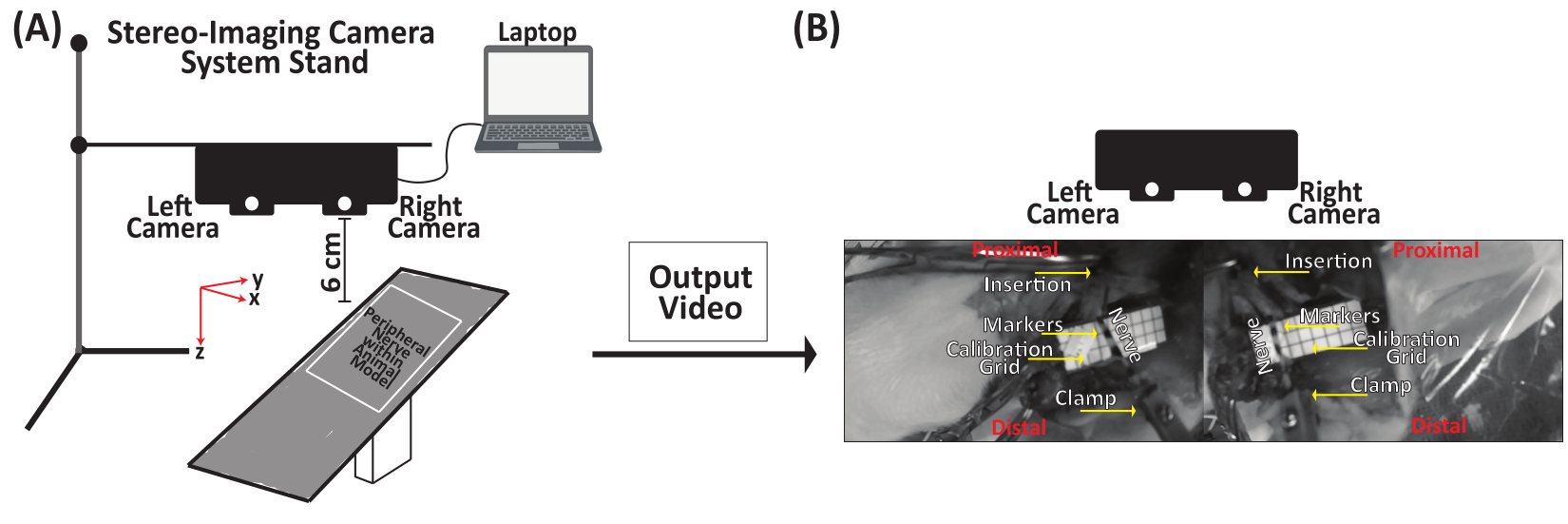
- Conecte o sistema de câmera de imagem estéreo ao suporte de utilitários, coloque-o até 6 cm acima do PN a ser esticado e, em seguida, conecte o sistema de câmera de imagem estéreo a um laptop por meio de um cabo USB tipo C (Figura 5A).
- Use um marcador de pele à base de tinta para colocar marcadores nos locais de inserção e pinça e dois a quatro marcadores adicionais ao longo do comprimento do NP, dependendo do comprimento do nervo, para rastreamento de deslocamento (Figura 5B).
- Coloque uma grade de calibração (ou seja, grade laminada com quadrados de 0,5 cm x 0,5 cm) e uma régua de 1 cm, plana abaixo do PN para análise de dados (Figura 5B).
- Registre o comprimento inicial do NP após o clampeamento e imediatamente antes do alongamento.
- Estique o NP a uma taxa de deslocamento de 500 mm/min até a falha ou um alongamento predeterminado.

Figura 5: Esquema representativo para aquisição de dados de alongamento de nervos periféricos. (A) Conecte o sistema de câmera de imagem estéreo a um suporte e, em seguida, conecte-o a um laptop por meio de um cabo USB tipo C. Coloque o sistema de câmera de imagem estéreo até 6 cm acima do nervo periférico. (B) O nervo periférico é preso à configuração mecânica na extremidade distal. Usando um marcador de pele à base de tinta, coloque um marcador nos locais de inserção e pinça e dois a quatro marcadores adicionais ao longo do comprimento do nervo. A solução salina é esguichada no nervo periférico para mantê-lo hidratado antes, durante e após o teste. Clique aqui para ver uma versão maior desta figura.
{kind=link}
5. Análise de dados - rastreamento de trajetória do marcador
- Execute o código MATLAB personalizado (Arquivo Suplementar 6) para separar o arquivo de vídeo de saída (Arquivo Suplementar 7) em dois arquivos de vídeo, arquivos de vídeo da câmera esquerda e direita (Arquivo Suplementar 8 e Arquivo Suplementar 9, respectivamente).
- Clique Correr para inicializar o DLTdv7.m22 GUI (Arquivo suplementar 10).
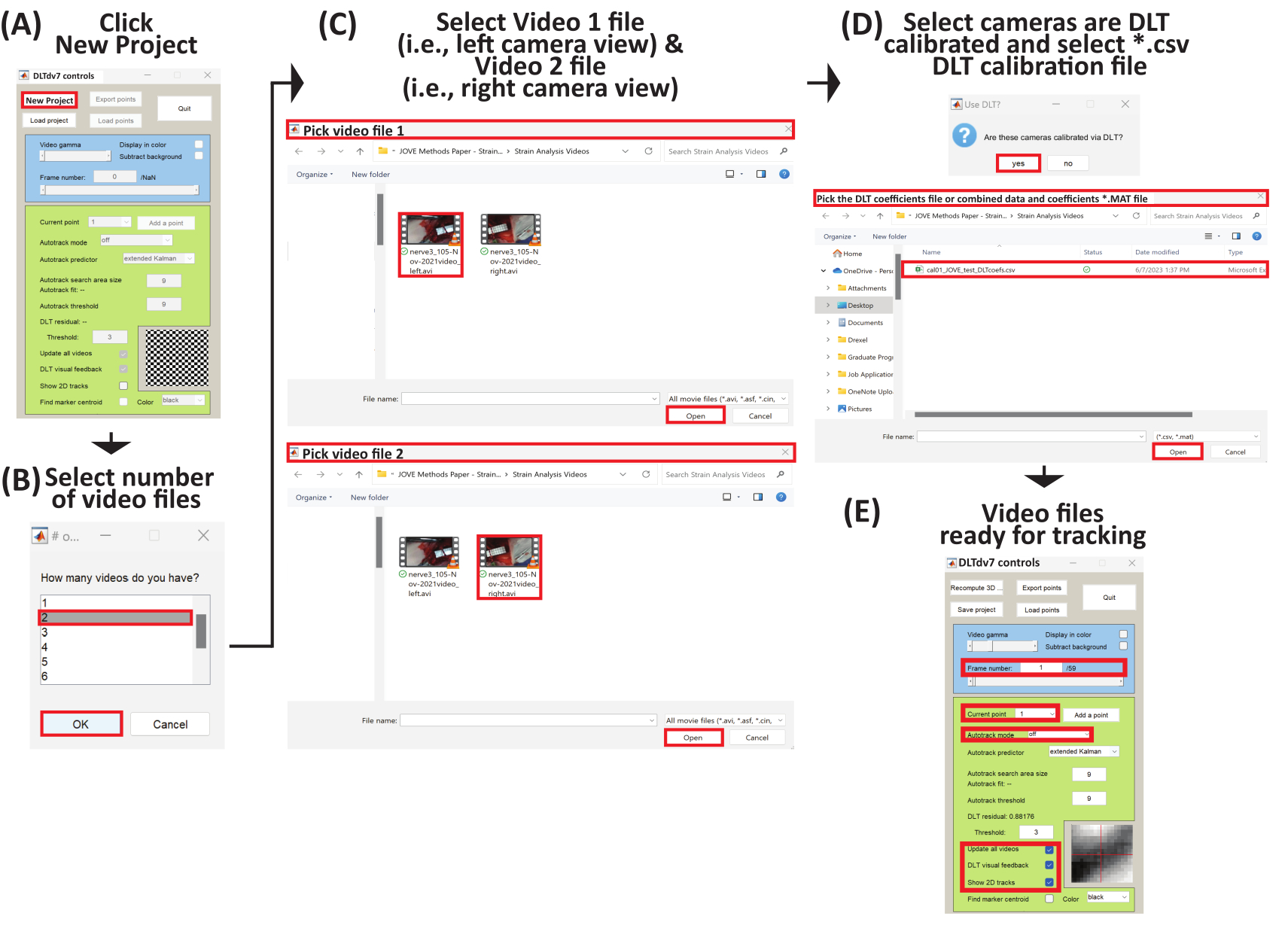
- A janela de controles DLTdv7 é exibida e os botões novo projeto, carregar projeto e sair são ativados (Figura 6A).
- Clique em novo projeto na janela de controles DLTdv7 para iniciar um novo projeto.
- Quando uma caixa de diálogo aparecer, selecione 2 para indicar dois arquivos de vídeo (ou seja, esquerda e direita da câmera views) para rastrear as trajetórias do marcador de deslocamento em um nervo periférico esticado (Figura 6B).
- Selecione o primeiro arquivo de vídeo (ou seja, Vídeo 1), que é o arquivo de vídeo da câmera esquerda view (Supplemental File 8) e clique em abrir (Figura 6C). Em seguida, selecione o segundo arquivo de vídeo (ou seja, Vídeo 2), que é o arquivo de vídeo da câmera direita view (Supplemental File 9) e clique em abrir (Figura 6C).
- Depois que os dois arquivos de vídeo forem selecionados, clique em sim para indicar que os arquivos de vídeo foram adquiridos a partir de visualizações da câmera calibradas via DLT.
- Selecione os coeficientes DLT correspondentes *.csv file (Supplemental File 5) para o sistema de câmera de imagem estéreo e clique em abrir (Figura 6D).
- Os quadros de vídeo iniciais são exibidos a partir de ambos os arquivos de vídeo e o restante da janela de controles DLTdv7 é ativado. O botão novo projeto é substituído pelo botão recalcular pontos 3D e o botão carregar projeto é substituído pelo botão salvar (Figura 6E).
- Na janela de controles DLTdv7 , certifique-se de que o número do quadro esteja em 1, o ponto atual esteja definido como 1, o modo de rastreamento automático esteja desativado e atualize todos os vídeos, o feedback visual DLT e mostre que as trilhas 2D estão marcadas (Figura 6E).
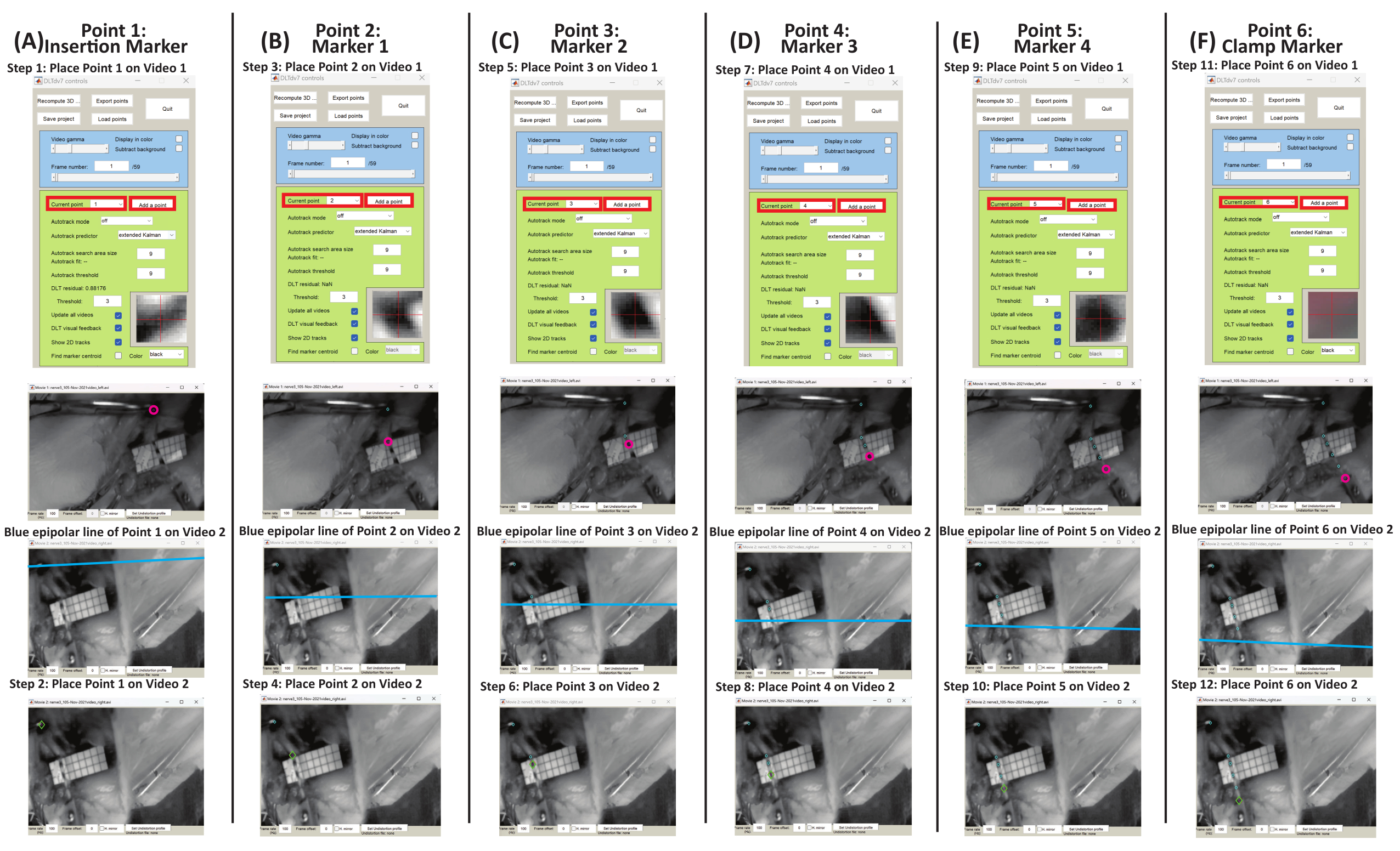
- Certifique-se de que os pontos de rastreamento sejam colocados nos marcadores de deslocamento do PN de modo que o marcador de inserção corresponda ao ponto 1, o marcador 1 corresponda ao ponto 2 e assim por diante, com o marcador de grampo sendo o ponto final.
- Coloque o ponto 1 no marcador de inserção no Vídeo 1 (ou seja, câmera esquerda view arquivo de vídeo) garantindo que o ponto colocado esteja no centro do marcador de inserção. Use atalhos de teclado (Tabela 1) para mover o ponto colocado para o centro do marcador de inserção (Figura 7A).
- Como o feedback visual DLT é verificado, quando um ponto é colocado no Vídeo 1, uma linha epipolar azul aparece no Vídeo 2 (ou seja, o arquivo de vídeo de visualização da câmera direita) (Figura 7). Coloque o ponto 1 no marcador de inserção no Vídeo 2 usando a linha epipolar azul como referência. Use os atalhos de teclado (Tabela 1), conforme necessário, para mover o ponto colocado para o centro do marcador de inserção (Figura 7A).
- Clique em adicionar um ponto na janela de controles DLTdv7 para adicionar pontos nos outros marcadores de tecido para rastrear suas trajetórias. Consulte o ponto atual na janela de controles DLTdv7 para saber qual ponto está ativo.
- Clique em adicionar um ponto. Coloque o ponto 2 no marcador 1 no Vídeo 1. Use a linha epipolar azul e os atalhos de teclado para colocar o ponto 2 no marcador 1 no Vídeo 2. Continue adicionando e colocando pontos, primeiro no Vídeo 1 e depois no Vídeo 2, para todos os marcadores de deslocamento ao longo do comprimento do nervo entre a inserção e a pinça (ou seja, ponto final) (Figura 7B-F).
- Depois que todos os pontos iniciais forem colocados no Vídeo 1 e no Vídeo 2 (ou seja, os arquivos de vídeo da câmera esquerda e direita, respectivamente), verifique se o número do quadro está em 1 e se o ponto atual está definido como 1 na janela de controles DLTdv7 .
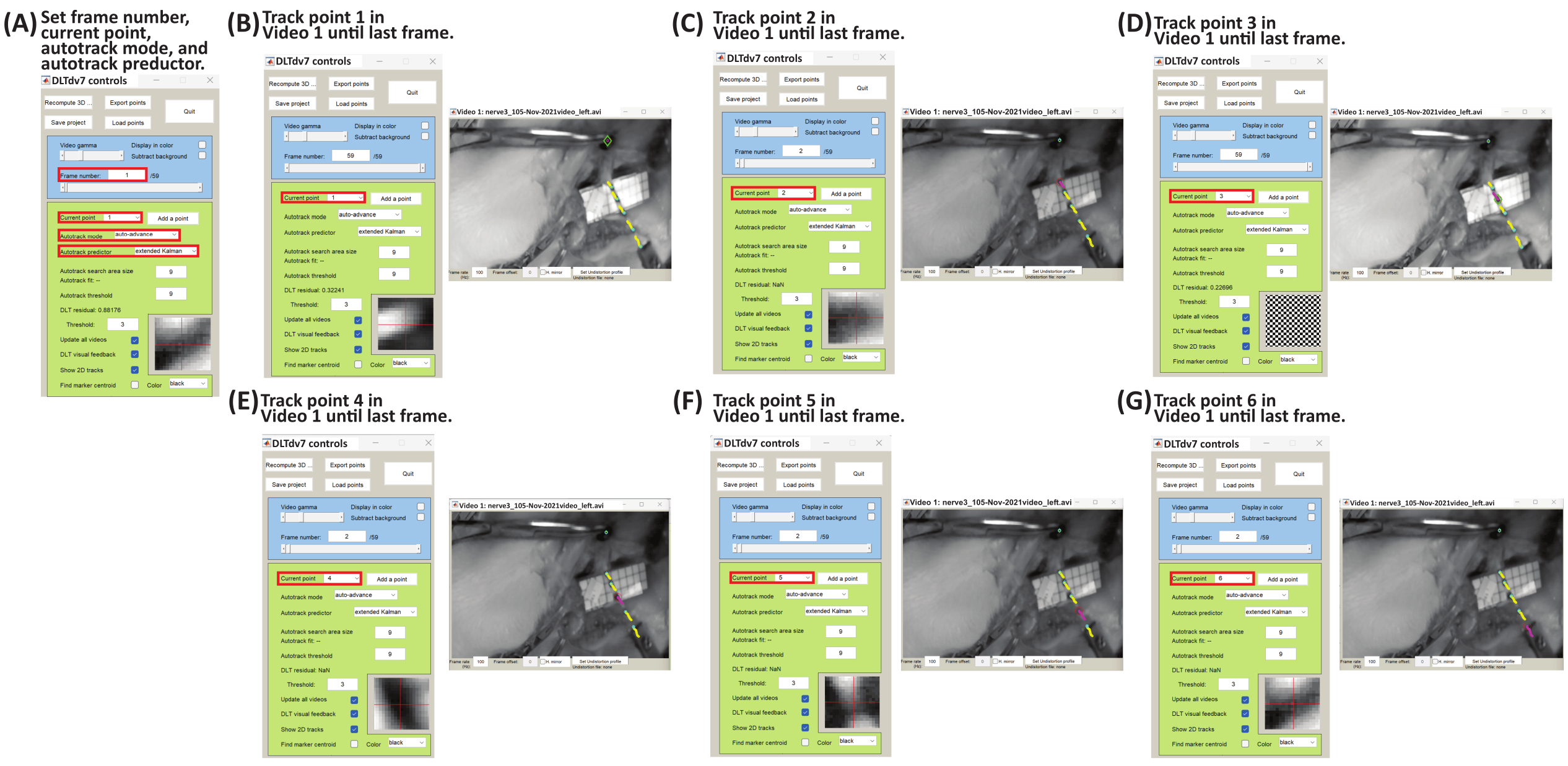
- Na janela de controles DLTdv7 , altere o modo de rastreamento automático para avanço automático no menu suspenso e o preditor de rastreamento automático para Kalman estendido no menu suspenso (Figura 8A).
- Conclua o rastreamento de todos os pontos colocados no Vídeo 1 primeiro e, em seguida, conclua o rastreamento no Vídeo 2. Acompanhe a trajetória do marcador clicando com o botão esquerdo do mouse no centro do marcador quadro a quadro até que a falha (ou seja, quadro antes da ruptura grosseira do nervo periférico) ou a totalidade do vídeo para o alongamento predeterminado seja alcançada.
- Comece o ponto de rastreamento 1 no Vídeo 1. Aumente e diminua o zoom (Tabela 1) conforme desejado para garantir que o rastreamento esteja no centro do marcador; clique quadro a quadro até a falha ou o final do vídeo (Figura 8B). Depois de concluir o rastreamento do ponto 1 no Vídeo 1, retorne ao quadro 1 e altere o ponto atual para o ponto 2 no menu suspenso na janela de controles DLTdv7 . O ponto rastreado anterior ficará azul claro e sua trajetória ficará amarela. O ponto atual terá um losango verde e um centro rosa.
- Conclua o rastreamento de todos os pontos no Vídeo 1 clicando com o botão esquerdo quadro a quadro para cada ponto até a falha ou o final do vídeo (Figura 8C-G).
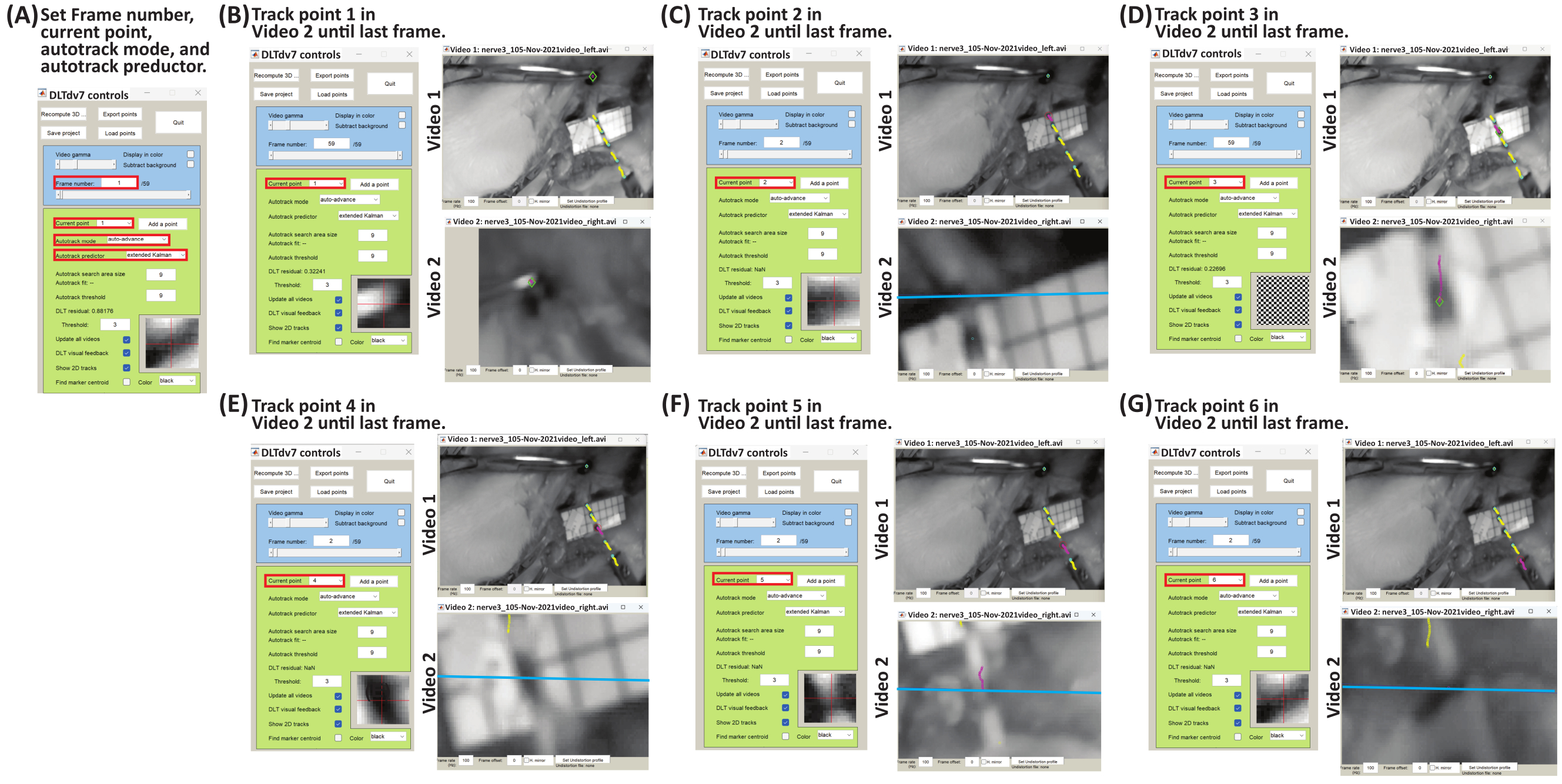
- No Vídeo 2, use a linha epipolar azul para rastrear pontos em referência ao Vídeo 1 (Figura 9). Na janela de controles DLTdv7 , retorne o número do quadro para 1 e defina o ponto atual como 1 e comece a rastrear a trajetória do ponto 1 no Vídeo 2.
- Siga as mesmas etapas (5.2.16-5.2.18) para rastrear os pontos restantes no Vídeo 2.
- Após a conclusão do rastreamento no Vídeo 1 e no Vídeo 2, clique em exportar pontos na janela de controles DLTdv7 para exportar as coordenadas (x, y, z) (em mm) dos pontos rastreados.
- Uma caixa de diálogo aparece para selecionar o diretório onde salvar os arquivos de saída. Clique no local do diretório.
- Outra caixa de diálogo aparece para definir o nome dos arquivos de saída. Defina o nome dos arquivos de saída (ou seja, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- Outra caixa de diálogo aparece. Selecione o formato de salvamento como simples.
- Outra caixa de diálogo é exibida. Selecione não para calcular o intervalo de confiança de 95%.
- Uma caixa de diálogo final é exibida mostrando que os dados são exportados e salvos, e os quatro arquivos de saída são exportados para o local de diretório selecionado (Arquivo Suplementar 11, Arquivo Suplementar 12, Arquivo Suplementar 13 e Arquivo Complementar 14).
- Clique em salvar projeto na janela de controles DLTdv7 para salvar o projeto atual (Arquivo Suplementar 15) no mesmo diretório que os arquivos de saída.

Figura 6: Esquema para configurar um novo projeto para iniciar o rastreamento de trajetória tridimensional. (A) Execute DLTdv7.m22 e clique em Novo projeto para iniciar um novo projeto. (B) Selecione 2 como o número de arquivos de vídeo. (C) Selecione Vídeo 1 file (ou seja, câmera esquerda view) e, em seguida, selecione Vídeo 2 file (ou seja, câmera direita view). (D) Selecione sim , pois os arquivos de vídeo vêm de um sistema de câmera de imagem estéreo calibrado DLT. Em seguida, selecione o arquivo *.csv contendo os coeficientes DLT. (E) Os arquivos de vídeo selecionados agora estão prontos para rastreamento. Clique aqui para ver uma versão maior desta figura.
{kind=link}
| Chave/Clique | Descrição |
| Clique com o botão esquerdo | Rastreia a trajetória de um ponto no quadro clicado |
| (+) Chave | Amplia o quadro de vídeo atual no ponteiro de movimento |
| (-) Chave | Amplia o quadro de vídeo atual para fora do ponteiro mosue |
| (i) Chave | Mover o ponto para cima |
| (j) Chave | Mover ponto para a esquerda |
| (k) Chave | Mover o ponto para a direita |
| (m) Chave | Mover o ponto para baixo |
Tabela 1: Atalhos de teclado e mouse para rastrear a trajetória do ponto.

Figura 7: Esquema para colocar pontos iniciais em marcadores de tecido para Vídeo 1 e Vídeo 2 usando DLTdv7.m22. (A) Defina o ponto atual como 1. Coloque o ponto 1 no marcador de inserção no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 1 no marcador de inserção. (B) Defina o ponto atual como 2. Coloque o ponto 2 no marcador 1 no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 2 no marcador 1. (C) Defina o ponto atual para 3. Coloque o ponto 3 no marcador 2 no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 3 no marcador 2. (D) Defina o ponto atual para 4. Coloque o ponto 4 no marcador 3 no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 4 no marcador 3. (E) Defina o ponto atual para 5. Coloque o ponto 5 no marcador 4 no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 5 no marcador 4. (F) Defina o ponto atual para 6. Coloque o ponto 6 no clamp marcador no Vídeo 1. Usando a linha epipolar azul no Vídeo 2, coloque o ponto 6 no clamp marcador. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 8: Esquema para rastrear trajetórias de pontos de marcação do Vídeo 1 usando DLTdv7.m22. (A) Defina o número do quadro como 1, o ponto atual como 1, o modo de rastreamento automático como avanço automático e o preditor de rastreamento automático como Kalman estendido. (B) Defina o ponto atual como 1. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador de inserção (ou seja, ponto 1) clicando com o botão esquerdo quadro a quadro até o último quadro. (C) Defina o número do quadro como 1 e o ponto atual como 2. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador 1 (ou seja, ponto 2) clicando com o botão esquerdo do mouse quadro a quadro até o último quadro. (D) Defina o número do quadro como 1 e o ponto atual como 3. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador 2 (ou seja, ponto 3) clicando com o botão esquerdo do mouse quadro a quadro até o último quadro. (E) Defina o número do quadro como 1 e o ponto atual como 4. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador 3 (ou seja, ponto 4) clicando com o botão esquerdo quadro a quadro até o último quadro. (F) Defina o número do quadro como 1 e o ponto atual como 5. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador 4 (ou seja, ponto 5) clicando com o botão esquerdo do mouse quadro a quadro até o último quadro. (G) Defina o número do quadro como 1 e o ponto atual como 6. No arquivo Vídeo 1 , comece a rastrear o deslocamento do marcador de grampo (ou seja, ponto 6) clicando com o botão esquerdo quadro a quadro até o último quadro. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 9: Esquema para rastrear trajetórias de pontos de marcação do Vídeo 2 usando DLTdv7.m22. (A) Defina o número do quadro como 1, o ponto atual como 1, o modo de rastreamento automático para avançar automaticamente e o preditor de rastreamento automático para Kalman estendido. (B) Defina o ponto atual como 1. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador de inserção (ou seja, ponto 1) clicando com o botão esquerdo quadro a quadro até o último quadro. (C) Defina o número do quadro como 1 e o ponto atual como 2. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador 1 (ou seja, ponto 2) clicando com o botão esquerdo quadro a quadro até o último quadro. (D) Defina o número do quadro como 1 e o ponto atual como 3. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador 2 (ou seja, ponto 3) clicando com o botão esquerdo quadro a quadro até o último quadro. (E) Defina o número do quadro como 1 e o ponto atual como 4. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador 3 (ou seja, ponto 4) clicando com o botão esquerdo quadro a quadro até o último quadro. (F) Defina o número do quadro como 1 e o ponto atual como 5. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador 4 (ou seja, ponto 5) clicando com o botão esquerdo quadro a quadro até o último quadro. (G) Defina o número do quadro como 1 e o ponto atual como 6. Usando a linha epipolar azul no arquivo Vídeo 2 , comece a rastrear o deslocamento do marcador de grampo (ou seja, ponto 6) clicando com o botão esquerdo quadro a quadro até o último quadro. Clique aqui para ver uma versão maior desta figura.
{kind=link}
6. Análise de deformação de dados
- Execute um código MATLAB personalizado (Arquivo Suplementar 16) para importar as trajetórias do marcador 3D (x, y, z) rastreadas (em mm).
- Na janela de comando do MATLAB, digite:
percentTensão, deltaLi, comprimentoNi, nome do arquivo] = PercentStrain_3D - Insira o tempo de ruptura, por exemplo, se os arquivos de vídeo tiverem 59 quadros, o tempo será de 0,59 s; insira o número de pontos rastreados e selecione o arquivo *_xyzpts.csv, com as trajetórias 3D (x, y, z) rastreadas (em mm).
- Selecione o diretório para salvar os gráficos de comprimento versus tempo de saída (Figura Suplementar S4), alteração no comprimento versus tempo (Figura Suplementar S5) e deformação versus tempo (Figura Suplementar S6) e arquivo *.xls com tempo, comprimento, alteração no comprimento e deformação (Arquivo Suplementar 17).
- Calcule o comprimento (l), a mudança no comprimento (Δl) e a deformação percentual usando as equações 1-3:
 Características (1)
Características (1)
Onde lié a distância entre quaisquer dois marcadores em qualquer ponto de tempo; x1i, y1i, z1i são as coordenadas 3D de um dos dois marcadores; e x2i, y2i, z2i são as coordenadas 3D dos segundos marcadores. (2)
(2)
Onde lié a distância entre quaisquer dois marcadores em qualquer ponto de tempo, e lo é a distância entre quaisquer dois marcadores no ponto de tempo original/zero. Eletrônicos (3)
Eletrônicos (3)
Onde Δlié a mudança no comprimento entre dois marcadores em qualquer ponto de tempo, e loé a distância entre quaisquer dois marcadores no ponto de tempo original/zero.
Resultados
Usando a metodologia descrita, vários arquivos de saída são obtidos. O DLTdv7.m *_xyzpts.csv (Arquivo Suplementar 12) contém as coordenadas (x, y, z) em milímetros de cada ponto rastreado em cada período de tempo que é usado posteriormente para calcular o comprimento, a mudança no comprimento e a deformação do PN esticado. Gráficos representativos de comprimento-tempo, mudança de comprimento-tempo e deformação-tempo de um NP esticado são mostrados na Figura 10...
Discussão
Estudos que relatam propriedades biomecânicas de nervos periféricos (NPs) devido à lesão por estiramento variam, e essa variação pode ser atribuída a metodologias de teste, como equipamento de teste e análise de alongamento 5,6,7,8,9,10,11,12,13,14,16,24
Divulgações
Os autores não têm conflitos de interesse a divulgar.
Agradecimentos
Esta pesquisa foi apoiada por financiamento do Instituto Nacional de Saúde Infantil e Desenvolvimento Humano Eunice Kennedy Shriver dos Institutos Nacionais de Saúde sob o Prêmio Número R15HD093024 e R01HD104910A e Prêmio NSF CAREER Número 1752513.
Materiais
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
Referências
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados