需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Methods Article
直接线性变换,用于拉伸过程中原 位 周围神经应变的测量
摘要
该协议实现了一个立体成像相机系统,该系统使用直接线性变换进行校准,以捕获拉伸周围神经的三维 原位 位移。通过捕获这些位移,可以确定在不同程度的拉伸下诱导的应变,从而通知拉伸损伤阈值,从而推进拉伸依赖性神经修复的科学。
摘要
周围神经在发育、正常关节运动、损伤以及最近接受手术修复时经历生理和非生理拉伸。了解周围神经对拉伸的生物力学反应对于了解它们对不同负荷条件的反应至关重要,因此,对于优化治疗策略和手术干预至关重要。该协议详细描述了立体成像相机系统的校准过程,通过直接线性变换和跟踪拉伸过程中周围神经的三维 原位 组织位移,从校准的立体成像相机系统捕获的视频文件的三维坐标中获得。
根据获得的三维坐标,可以计算出拉伸的周围神经的神经长度、神经长度的变化和随时间的变化百分比应变。使用立体成像摄像头系统提供了一种非侵入性方法,用于捕获拉伸时周围神经的三维位移。直接线性变换可以在拉伸过程中对周围神经长度进行三维重建,以测量应变。目前,还没有使用通过直接线性变换校准的立体成像相机系统研究拉伸周围神经的 原位 应变的方法。捕获拉伸时周围神经的 原位 应变不仅可以帮助临床医生了解过度拉伸时神经损伤的潜在损伤机制,还有助于优化依赖于拉伸诱导干预的治疗策略。论文中描述的方法有可能增强我们对响应拉伸的周围神经生物力学的理解,从而改善神经损伤管理和康复领域的患者预后。
引言
周围神经 (PN) 在发育、生长、正常关节运动、损伤和手术1 过程中经历拉伸。PN 表现出粘弹性,可在正常运动期间保护神经 2,3 并维持其神经纤维的结构健康2。因为 PN 对机械拉伸的反应已被证明取决于神经纤维损伤的类型4、对相邻结缔组织的损伤 2,4 和测试方法(即负荷速率或方向)5,6,7,8,9,10,11,12,13,14,必须区分 PNs 在正常运动范围内和非生理范围内在慢拉伸和快速拉伸速率下的生物力学反应。这可以进一步理解响应拉伸的 PN 损伤机制,并有助于及时和优化干预 1,4,15,16。物理治疗越来越倾向于根据神经生理学和生物力学之间的关系来评估和干预17。通过了解各种施加负载下 PN 生物力学的差异,物理治疗师可以更好地准备修改当前的干预措施17。
响应拉伸的 PN 的可用生物力学数据仍然可变,可归因于测试设备和程序以及伸长数据分析的差异 5,6,7,8,9,10,11,12,13,14,16。此外,在目前可用的文献中,测量三维 (3D) 原位神经位移仍然描述不佳。以前的研究使用立体成像技术来最大限度地提高小关节囊组织移位的 3D 重建的准确性18,19。直接线性变换 (DLT) 技术能够将两个或多个二维 (2D) 视图转换为 3D 真实世界坐标(即以毫米为单位)20,21,22。DLT 为立体成像相机系统提供了一种高精度校准方法,因为它能够精确重建 3D 位置,考虑镜头畸变、相机参数和图像坐标,并允许立体成像相机设置的灵活性 20,21,22。使用 DLT 校准的立体成像摄像系统的研究通常用于研究运动和步态分析22,23。该协议旨在提供一种详细的方法,以使用 DLT 校准的立体成像相机系统和开源跟踪软件22 来确定不同拉伸程度的 PN 的原位应变。
研究方案
描述的所有程序均已获得德雷塞尔大学机构动物护理和使用委员会 (IACUC) 的批准。新生仔猪购自位于美国宾夕法尼亚州的美国农业部 (USDA) 批准的农场。
1. 立体成像系统设置
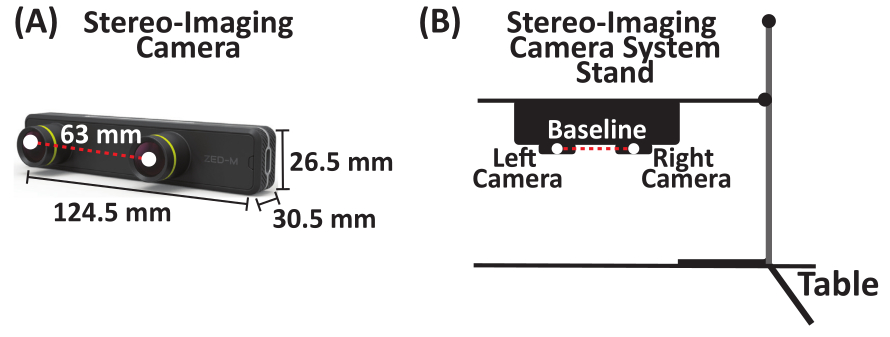
- 将捕获速度高达 100 帧/秒 (FPS) 的立体成像摄像机系统连接到实用支架上。本研究中使用的立体成像相机系统是一个被动立体相机,带有两个水平对齐的相机(称为左相机和右相机),基线相隔 63 毫米(图 1)。

图 1:立体成像相机系统。 (A) 平行立体成像相机系统,两个摄像头(左和右摄像头)相隔,基线为 63 毫米。(B) 立体成像相机系统和支架设置示意图。 请单击此处查看此图的较大版本。
{kind=link}
2. 立体成像系统 DLT Calibration-数字化 3D 控制体积
- 获得三张透明丙烯酸有机玻璃方片(12 英寸 x 12 英寸 x 0.125 英寸)。在每张图纸上,放置一个网格并绘制至少 10 个点,从而在 x、y 和 z 坐标平面的 3D 控制体积上分布至少 30 个点。通过将三张纸堆叠在不同高度来构建 3D 控制体积,以捕获将要记录的最大高度(图 2A)。
- 使用带有脚踏板的数字化器数字化 3D 控制体积上的所有点。通过在 3D 控制立方体上建立原点 (0, 0, 0),定义正 x 和 y 方向,打开文档以保存每个点的数字化 (x, y, z) 坐标(以毫米为单位),并将 (x, y, z) 坐标(以毫米为单位)保存为 *.csv 文件,获取 x、y 和 z 坐标(以毫米为单位)(图 2B)。
注意: (x, y, z) 坐标相对于 3D 控制立方体上设置的原点。 - 使用这些数字化的 (x, y, z) 坐标(以毫米为单位)分别校准立体成像相机系统的左摄像头和右摄像头。

图 2:带脚踏板的 3D 控制体积和数字化器。 (A) 3D 控制体积示意图。(B) 带脚踏板的数字化器组件,用于数字化 3D 控制体积以获得 (x, y, z) 坐标,单位为 mm。简称:3D = 三维。 请单击此处查看此图的较大版本。
{kind=link}
3. 立体成像相机系统标定 - 生成直接线性变换系数
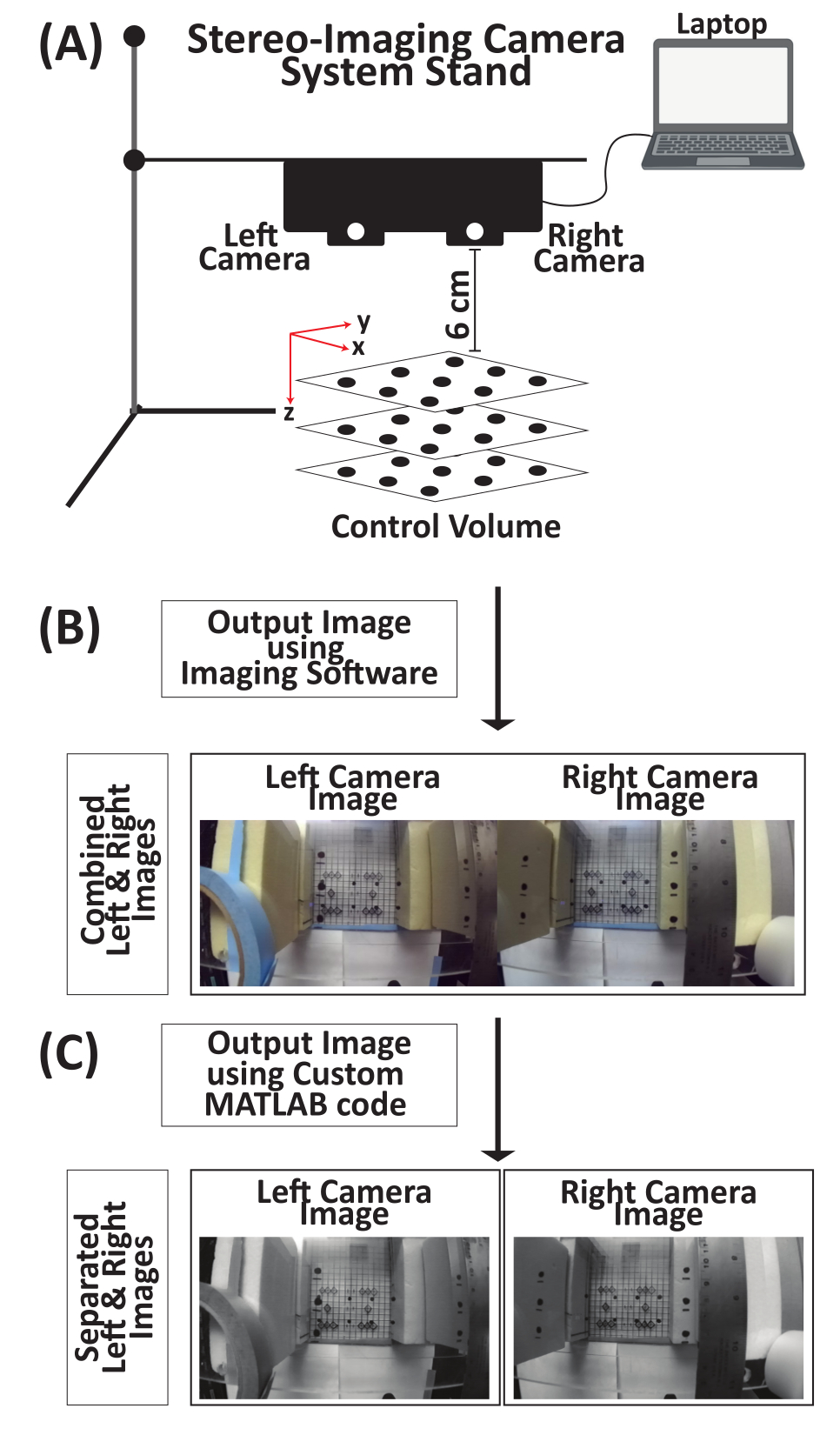
- 将立体成像相机系统连接到实用支架上(图 3A)。
- 将立体成像相机系统放置在 3D 控制体积上方 6 cm 处(图 3A)。
- 通过 USB Type-C 电缆将立体成像摄像机系统连接到笔记本电脑。
- 打开成像软件(参见 材料表)。
- 对 3D 控制体积进行成像。输出图像(补充图 S1)包括左侧和右侧相机视图(图 3B)。
- 运行自定义 MATLAB 代码(补充文件 1),将输出图像分成两个图像,分别是左图像和右图像(分别为图 3C、 补充图 S2 和 补充图 S3)。
- 单击 Run 初始化 DLTcal5.m GUI22 (补充文件 2)。
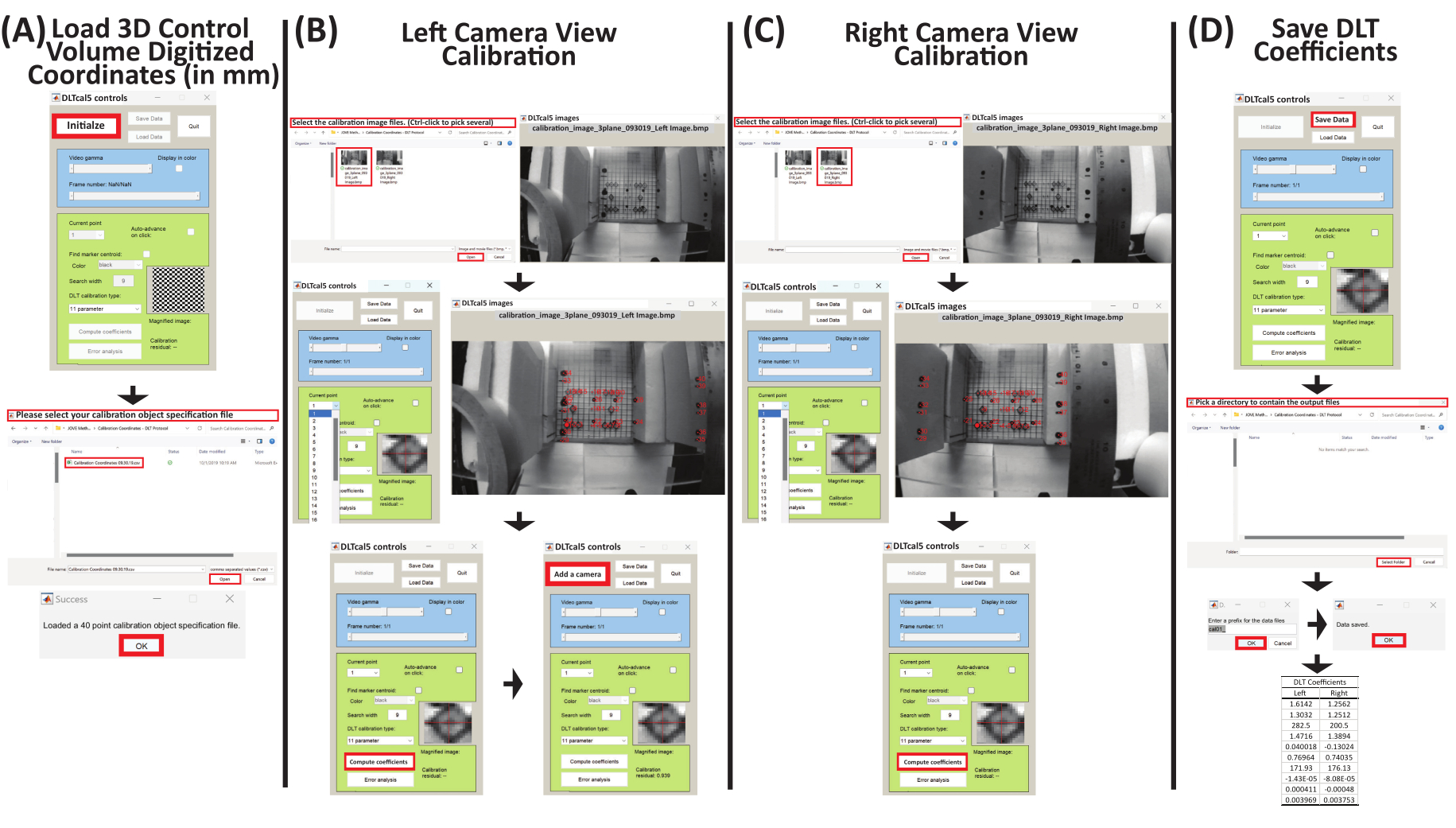
- 单击 DLTcal5 控件窗口上的初始化,选择具有数字化 (x, y, z) 坐标(以 mm 为单位)的 *.csv 文件(图 4A 和补充文件 3)。
- 从立体成像相机系统的第一个视图中选择 3D 控制体积的相应图像(补充图 S2)。对于这个立体成像相机系统,左侧相机视图对应于第一个相机视图(图 4B)。
- 第一个摄像机视图图像(即左摄像机视图)弹出。
- 按照第 2 节中点的数字化顺序选择点,以从左侧相机视图获取 2D 像素坐标(图 4B)。
- 在 DLTcal5 控件窗口中设置当前点,然后单击加载的第一个摄像机视图(即左侧摄像机视图)图像上的相应当前点。
- 选择加载的第一个相机视图上的所有点后,单击 计算系数 以生成左侧相机视图的 11 个 DLT 系数(图 4B)。
- 单击 DLTcal5 控件窗口上的添加相机,然后重复步骤 3.7.2-3.7.6 以生成右侧相机视图(即第二个相机视图)的 11 个 DLT 系数(图 4B、C 和补充图 S3)。
- 单击 DLTcal5 控件窗口上的保存数据以选择将保存输出文件的文件夹(图 4D)。
- 输出文件包括 2D (x, y) 像素坐标(补充文件 4)和立体成像相机系统左右相机视图的相应 11 个 DLT 系数(图 4D 和 补充文件 5)。
- 立体成像摄像系统经过校准。

图 3:使用立体成像相机系统获取三维控制体积图像的示意图,用于直接线性变换校准。 (A) 将立体成像相机系统连接到支架上,然后通过 USB Type-C 电缆将其连接到笔记本电脑。将 3D 控制体积置于立体成像相机系统下方 6 cm 处。(B) 使用成像软件拍摄 3D 控制体积的图像。输出图像是来自左右摄像机的组合图像。(C) 使用自定义 MATLAB 代码,将组合的输出图像分成 3D 控制体积的单独左右图像。简称:3D = 三维。 请单击此处查看此图的较大版本。
{kind=link}

图 4:为立体相机成像系统的左右相机视图生成直接线性变换系数的示意图。(A) 运行 DLTcal5.m22,单击控件窗口上的初始化,然后选择具有 3D 控制体积的数字化 (x, y, z) 坐标(以毫米为单位)的 *.csv 文件。(B) 选择左侧相机视图的校准图像。然后,按照数字化的顺序选择图像上的点。然后,单击 compute coefficients (计算系数) 以生成左侧相机视图的 DLT 系数。接下来,单击 Add camera (添加摄像机) 以重复右侧摄像机视图的步骤。(C) 选择右侧相机视图的校准图像。然后,按照数字化的顺序选择图像上的点。然后,单击 compute coefficients 为右侧摄像机视图生成 DLT 系数。(D) 单击 Save Data 以选择目录以保存左右相机视图的 DLT 系数。输入输出文件的名称,然后单击 OK,DLT 系数将保存为 *.csv 文件。缩写:3D = 三维,DLT = 直接线性变换。请单击此处查看此图的较大版本。
{kind=link}
4. 数据采集
- 将麻醉的新生约克夏仔猪(3-5 天大)置于仰卧位,上肢外展以暴露腋窝区域。在覆盖气管的皮肤和筋膜上做一个中线切口,一直到胸骨的上三分之一。
- 使用钝器解剖露出臂丛神经。
- 将盐水溶液喷在暴露的臂丛神经上,以在测试前、测试中和测试后保持水分。
- 切开臂丛神经 PN 的远端并夹在机械测试装置上。
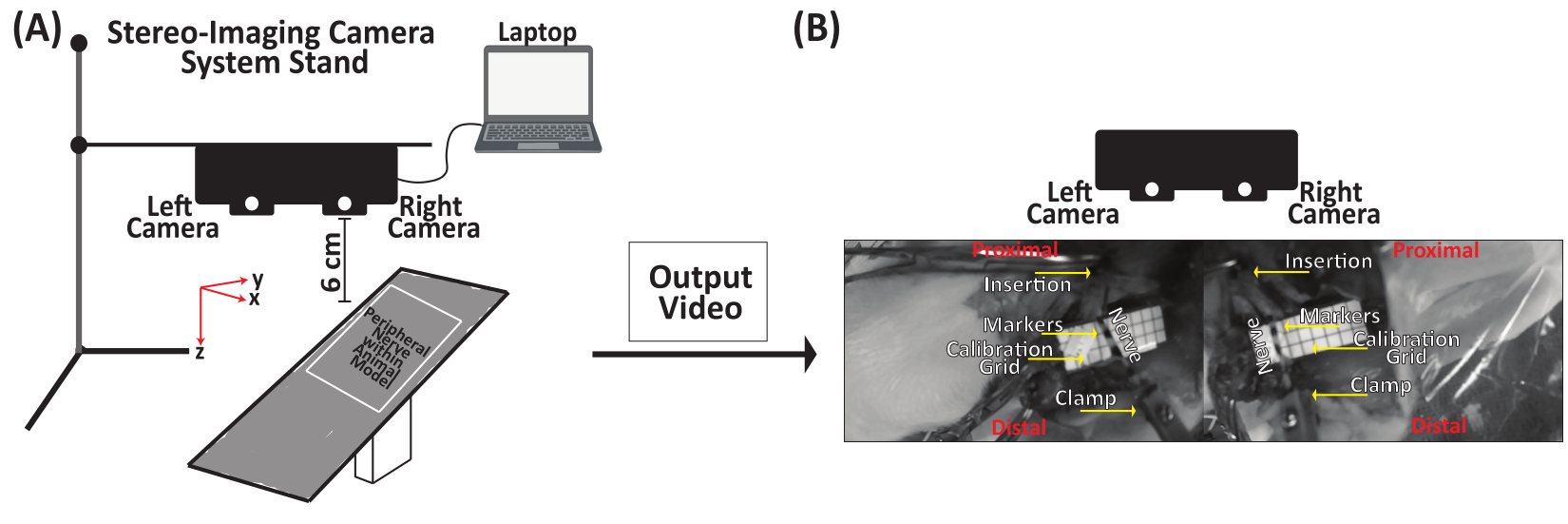
- 将立体成像相机系统连接到实用支架上,将其放置在要拉伸的 PN 上方 6 厘米处,然后通过 USB type-C 电缆将立体成像相机系统连接到笔记本电脑(图 5A)。
- 使用基于墨水的皮肤标记物将标记物放置在插入和夹住部位,并根据神经长度沿 PN 长度放置另外两到四个标记物,用于位移跟踪(图 5B)。
- 将校准网格(即具有 0.5 cm x 0.5 cm 正方形的层压网格)和 1 cm 尺子平放在 PN 下方进行数据分析(图 5B)。
- 记录夹紧后和拉伸前 PN 的初始长度。
- 以 500 mm/min 的位移速率拉伸 PN 至失效或预定拉伸。

图 5:周围神经拉伸数据采集的代表性示意图。 (A) 将立体成像相机系统连接到支架上,然后通过 USB Type-C 电缆将其连接到笔记本电脑。将立体成像摄像头系统放置在周围神经上方 6 cm 处。(B) 周围神经夹在远端的机械装置上。使用基于墨水的皮肤标记物,在插入和夹住部位放置一个标记物,并沿神经长度放置另外两到四个标记物。盐水喷洒在周围神经上,以保持其在测试前、测试中和测试后的水分。 请单击此处查看此图的较大版本。
{kind=link}
5. 数据分析 - 标记轨迹跟踪
- 运行自定义 MATLAB 代码(补充文件 6),将输出视频文件(补充文件 7)分成两个视频文件,即左和右摄像机视频文件(分别为补充文件 8 和 补充文件 9)。
- 点击 跑 要初始化 DLTdv7.m22 图形用户界面 (补充文件 10).
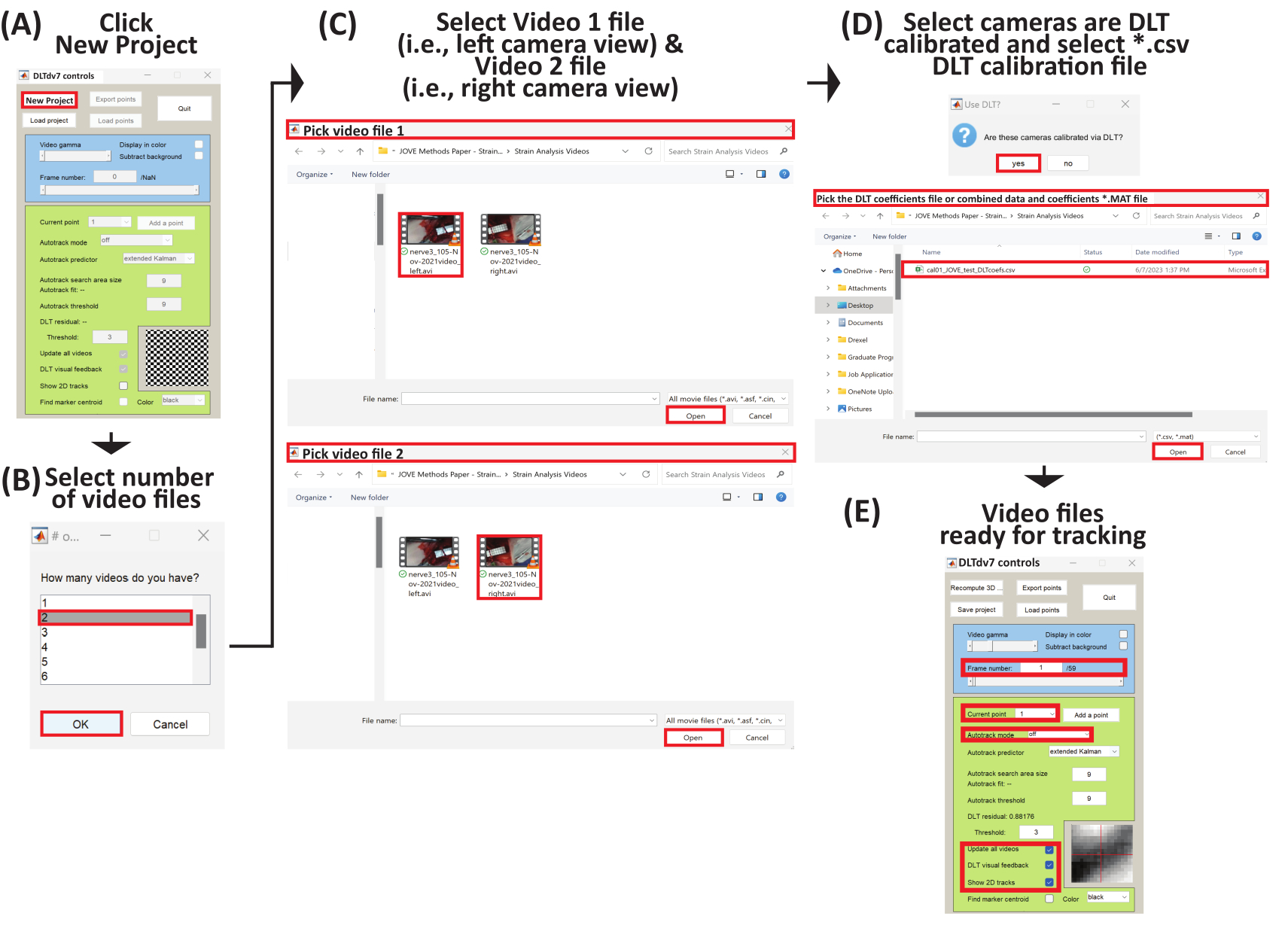
- DLTdv7 控件窗口弹出,并启用了 新项目、加载项目和 退出 按钮(图 6A)。
- 单击 DLTdv7 控件窗口上的 New project 以开始新项目。
- 当弹出对话框时,选择 2 以指示两个视频文件(即左右相机视图)以跟踪拉伸周围神经上的位移标记轨迹(图 6B)。
- 选择第一个视频文件(即 视频 1),这是来自左侧摄像头视图(补充文件 8)的视频文件,然后单击 打开 (图 6C)。然后,选择第二个视频文件(即 视频 2),这是来自右侧摄像机视图的视频文件(补充文件 9),然后单击 打开 (图 6C)。
- 选择两个视频文件后,单击 yes 表示视频文件是从通过 DLT 校准的摄像机视图中获取的。
- 为立体成像相机系统选择相应的 DLT 系数 *.csv 文件(补充文件 5),然后单击 打开 (图 6D)。
- 初始视频帧从两个视频文件中显示, DLTdv7 控件 窗口的其余部分被激活。 新项目 按钮替换为 重新计算 3D 点 按钮, 加载项目 按钮替换为 保存 按钮(图 6E)。
- 在 DLTdv7 控件窗口中,确保帧号为 1,当前点设置为 1,自动跟踪模式关闭,并检查更新所有视频、DLT 视觉反馈和显示 2D 轨道(图 6E)。
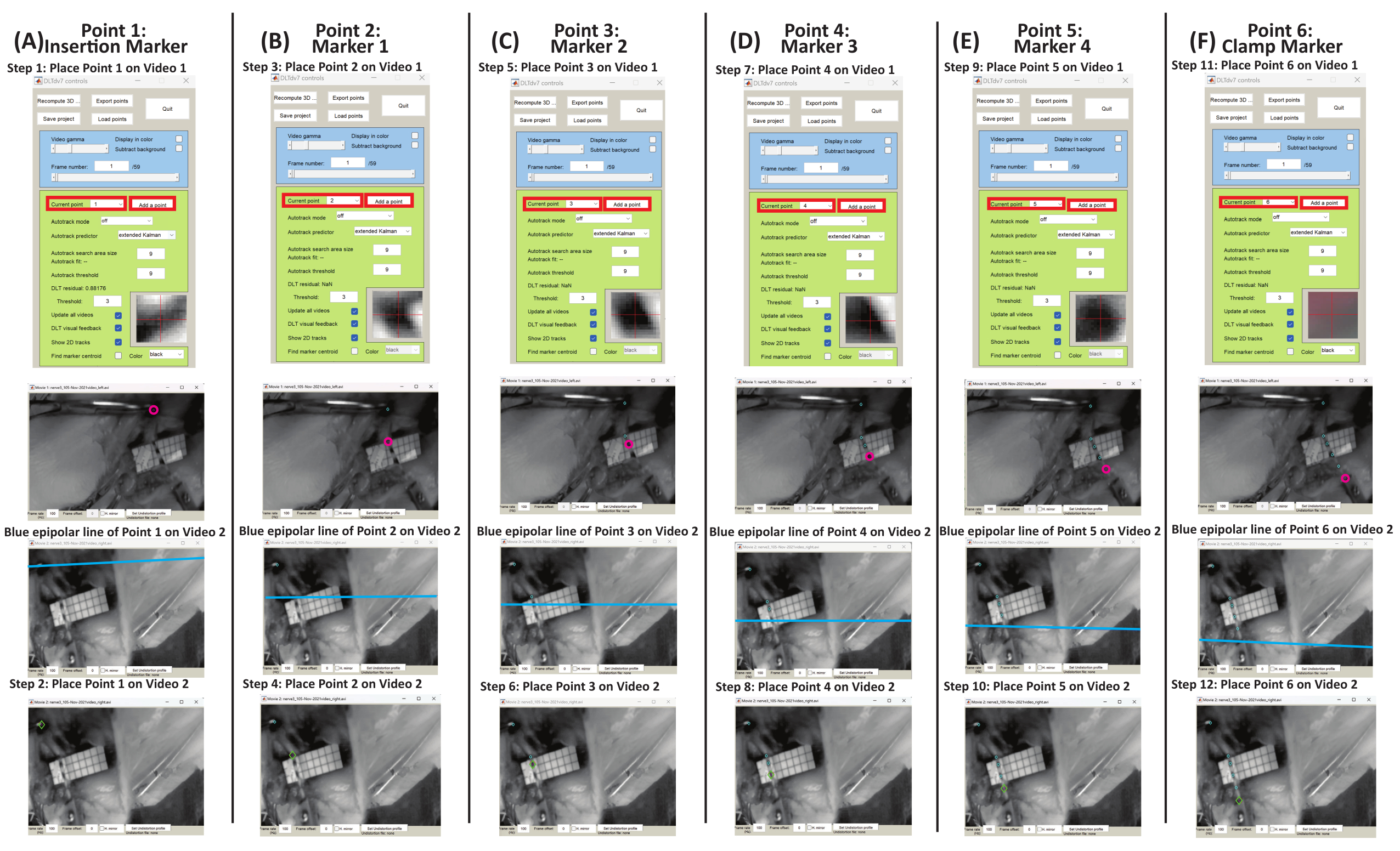
- 确保将跟踪点放置在 PN 的位移标记上,以便 插入标记 对应于点 1, 标记 1 对应于点 2,依此类推,钳制标记是最终点。
- 将点 1 放在视频 1 上的插入标记上(即左摄像机视图视频文件),确保放置的点位于插入标记的中心。使用键盘快捷键(表 1)将放置的点移动到插入标记的中心(图 7A)。
- 由于检查了 DLT 视觉反馈 ,因此在 视频 1 中放置一个点时, 视频 2 中会出现一条蓝色的外极线(即右相机视图视频文件)(图 7)。使用蓝色外极线作为参考,将点 1 放在 视频 2 中的插入标记上。根据需要使用键盘快捷键(表 1)将放置的点移动到插入标记的中心(图 7A)。
- 单击 DLTdv7 控件窗口上的 add a point(添加点),在其他组织标记物上添加点以跟踪其轨迹。请参阅 DLTdv7 控件窗口中的当前点,了解哪个点处于活动状态。
- 单击 add a point。将点 2 放在视频 1 中的标记 1 上。使用蓝色外生线和键盘快捷键将点 2 放在视频 2 中的标记 1 上。继续添加和放置点,首先在视频 1 上,然后在视频 2 上,沿插入点和夹之间神经长度(即最终点)的所有位移标记添加和放置点(图 7B-F)。
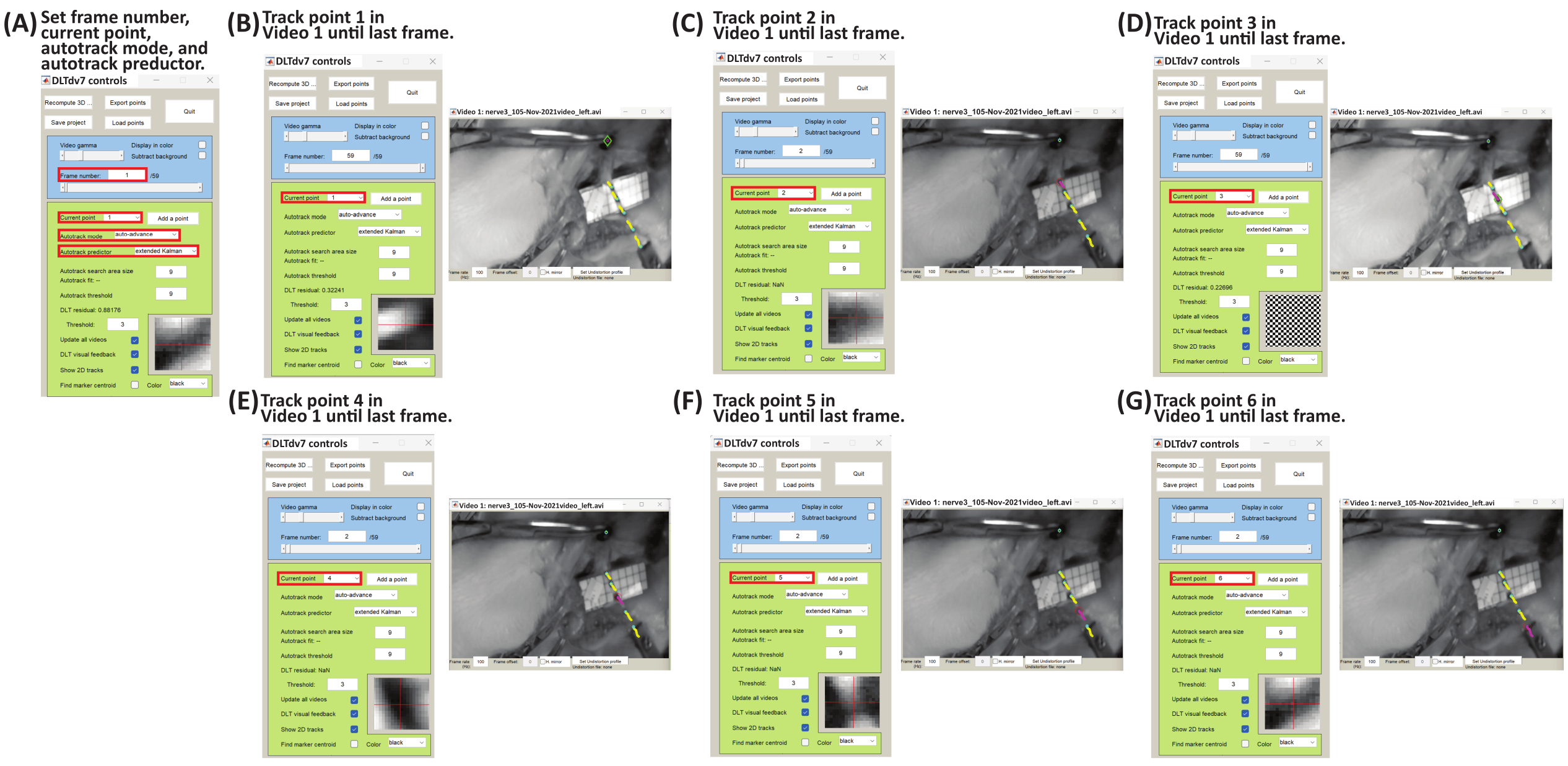
- 将所有初始点放置在视频 1 和视频 2 中(即分别是左和右摄像机视频文件)后,请确保在 DLTdv7 控件窗口中将帧编号设为 1,并将当前点设为 1。
- 在 DLTdv7 控件 窗口中,从下拉菜单中将自动 跟踪模式 更改为 自动前进 ,并从下拉菜单中将自动 跟踪预测器 更改为 扩展卡尔曼 (图 8A)。
- 先完成对 视频 1 中所有放置的点的跟踪,然后在 视频 2 中完成跟踪。通过逐帧左键单击标记的中心来跟踪标记轨迹,直到失败(即周围神经严重断裂之前的帧)或实现预定拉伸的整个视频。
- 在视频 1 中开始跟踪点 1。根据需要放大和缩小(表 1),以确保跟踪位于标记的中心;逐帧单击,直到视频失败或结束(图 8B)。在视频 1 中完成对点 1 的跟踪后,返回到第 1 帧,并从 DLTdv7 控件窗口的下拉菜单中将当前点更改为点 2。上一个跟踪的点将变为浅蓝色,其轨迹将变为黄色。当前点将具有一个绿色菱形和一个粉红色中心。
- 通过逐帧左键单击每个点,直到视频失败或结束,完成对视频 1 中所有点的跟踪(图 8C-G)。
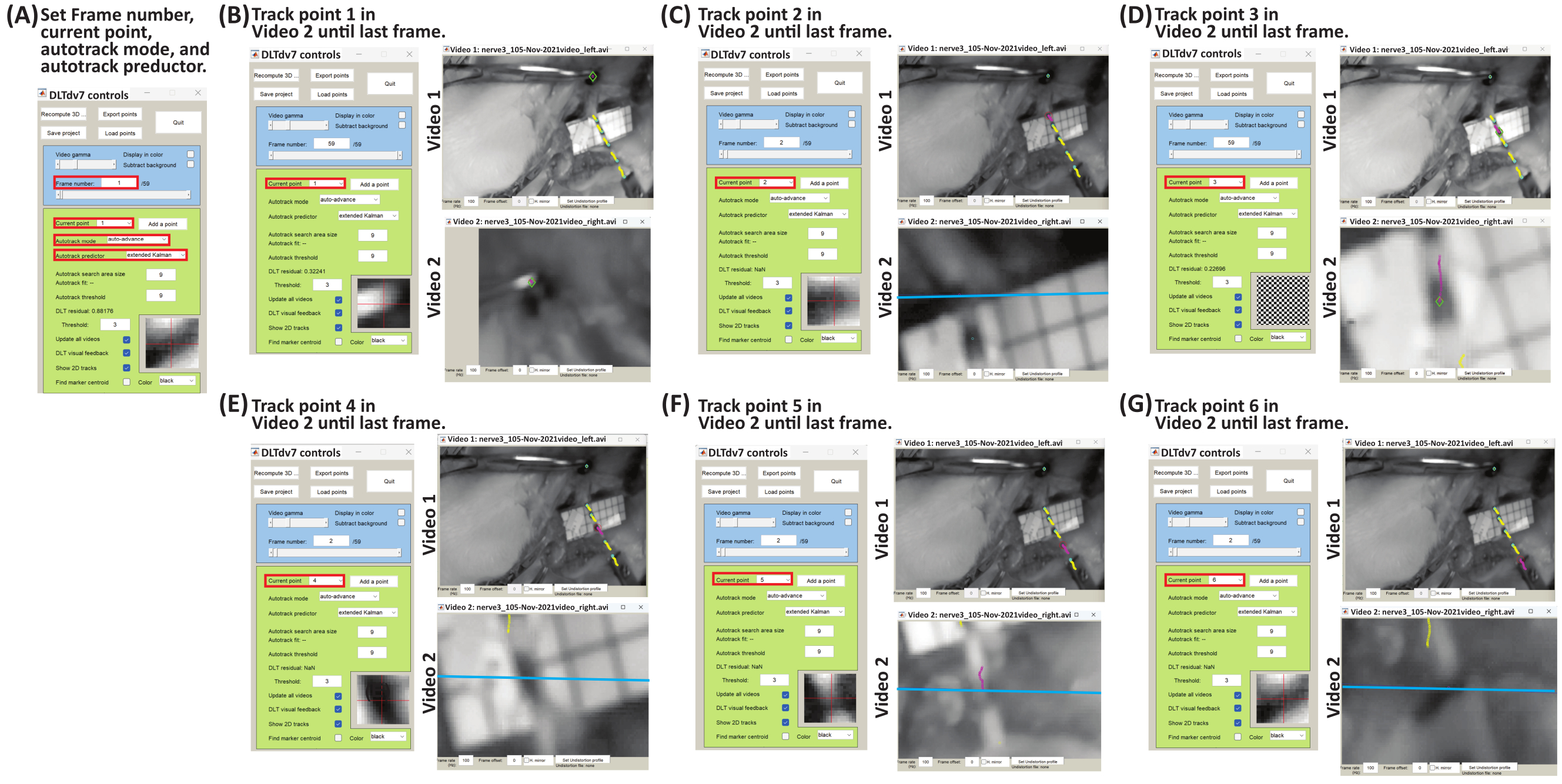
- 在 视频 2 中,使用蓝色外极线跟踪参考 视频 1 的点(图 9)。在 DLTdv7 控件 窗口中,将 帧号 返回 为 1 ,将 当前点 设置为 1,然后在 视频 2 中开始跟踪点 1 的轨迹。
- 按照相同的步骤 (5.2.16-5.2.18) 跟踪 视频 2 中的其余点。
- 在视频 1 和视频 2 中完成跟踪后,单击 DLTdv7 控件窗口上的导出点以导出跟踪点的 (x, y, z) 坐标(以毫米为单位)。
- 弹出一个对话框,选择保存输出文件的目录。单击 目录位置。
- 弹出另一个对话框以设置输出文件的名称。设置输出文件的名称(即 nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_)。
- 弹出另一个对话框。选择将保存 格式 选择 为平面。
- 弹出另一个对话框。选择 no (否) 以计算 95% 置信区间。
- 将弹出最后一个对话框,显示数据已导出并保存,并且四个输出文件将导出到选定的目录位置(补充文件 11、补充文件 12、补充文件 13 和 补充文件 14)。
- 单击 DLTdv7 控件窗口上的 save project,将当前项目(补充文件 15)保存在与输出文件相同的目录中。

图 6:设置新项目以开始三维轨迹跟踪的示意图。 (A) 运行 DLTdv7.m22 并单击 New Project 开始新项目。(B) 选择 2 作为视频文件的数量。(C) 选择 视频 1 文件 (即摄像机左视图),然后选择视频 2 文件(即摄像机右视图)。(D) 选择 "是 ",因为视频文件来自 DLT 校准的立体成像摄像机系统。然后,选择包含 DLT 系数的 *.csv 文件。(E) 所选视频文件现在已准备好进行跟踪。 请单击此处查看此图的较大版本。
{kind=link}
| 键/单击 | 描述 |
| 左键单击 | 跟踪单击的帧中点的轨迹 |
| (+)钥匙 | 在 arount mosue 指针 中 缩放当前视频帧 |
| (-)钥匙 | 通过鼠标 指针 缩放当前视频帧 |
| (i) 键 | 上移点 |
| (j) 键 | 向左移动点 |
| (k) 键 | 向右移动点 |
| (m) 键 | 下移点 |
表 1:用于跟踪点轨迹的键盘和鼠标快捷键。

图 7:使用 DLTdv7.m 在视频 1 和视频 2 的组织标记物上放置初始点的示意图22。(A) 将当前点设置为 1。将点 1 放在视频 1 中的插入标记上。使用视频 2 中的蓝色外侧线,将点 1 放在插入标记上。(B) 将当前点设置为 2。将点 2 放在视频 1 中的标记 1 上。使用视频 2 中的蓝色外极线,将点 2 放在标记 1 上。(C) 将当前点设置为 3。将点 3 放在视频 1 中的标记 2 上。使用视频 2 中的蓝色外侧线,将点 3 放在标记 2 上。(D) 将当前点设置为 4。将点 4 放在视频 1 中的标记 3 上。使用视频 2 中的蓝色外侧线,将点 4 放在标记 3 上。(E) 将当前点设置为 5。将点 5 放在视频 1 中的标记 4 上。使用视频 2 中的蓝色外侧线,将点 5 放在标记 4 上。(F) 将电流点设置为 6。将点 6 放在视频 1 中的夹子标记上。使用视频 2 中的蓝色外极线,将点 6 放在夹标记上。请单击此处查看此图的较大版本。
{kind=link}

图 8:使用 DLTdv7.m 跟踪视频 1 的标记点轨迹示意图22. (A) 将 帧号 设置为 1,将 当前点 设置为 1, 将自动跟踪模式 设置为 自动前进,将自动 跟踪预测器 设置为 扩展卡尔曼。(B) 将 当前点 设置为 1。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪插入标记(即点 1)位移。(C) 将 帧号 设置为 1 ,将 当前点 设置为 2。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪标记 1(即点 2)置换。(D) 将 帧号 设为 1 ,将 当前点 设为 3。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪标记 2(即点 3)置换。(E) 将 帧编号 设置为 1 ,将 当前点 设置为 4。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪标记 3(即点 4)置换。(F) 将 帧号 设为 1 ,将 当前点 设为 5。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪标记 4(即点 5)置换。(G) 将 帧编号 设为 1 ,将 当前点 设为 6。在 视频 1 文件上,通过逐帧左键单击直到最后一帧来开始跟踪钳制标记(即点 6)置换。 请单击此处查看此图的较大版本。
{kind=link}

图 9:使用 DLTdv7.m 跟踪视频 2 的标记点轨迹示意图22. (A) 将 帧号 设置为 1, 将当前点 设置为 1,将自动 跟踪模式 设置为 自动前进, 将自动跟踪预测器 设置为 扩展卡尔曼。(B) 将 当前点 设置为 1。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪插入标记(即点 1)位移。(C) 将 帧号 设置为 1 ,将 当前点 设置为 2。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪标记 1(即点 2)的位移。(D) 将 帧号 设为 1 ,将 当前点 设为 3。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪标记 2(即点 3)的位移。(E) 将 帧编号 设置为 1 ,将 当前点 设置为 4。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪标记 3(即点 4)的位移。(F) 将 帧号 设为 1 ,将 当前点 设为 5。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪标记 4(即点 5)的位移。(G) 将 帧编号 设为 1 ,将 当前点 设为 6。使用 视频 2 文件上的蓝色外极线,通过逐帧左键单击直到最后一帧来开始跟踪钳制标记(即点 6)位移。 请单击此处查看此图的较大版本。
{kind=link}
6. 数据分析-应变分析
- 运行自定义 MATLAB 代码(补充文件 16)以导入跟踪的 3D (x, y, z) 标记轨迹(以毫米为单位)。
- 在 MATLAB 命令窗口中,键入:
percentStrain、deltaLi、lengthNi、filename] = PercentStrain_3D - 填写 破裂时间,例如,如果视频文件有 59 帧,则时间为 0.59 s;输入 跟踪点的数量,然后选择 *_xyzpts.csv 文件,其中包含跟踪的 3D (x, y, z) 轨迹(以毫米为单位)。
- 选择 目录 以保存输出长度与时间的关系(补充图 S4)、长度与时间的变化(补充图 S5)和应变与时间的关系图(补充图 S6)以及包含时间、长度、长度变化和应变的 *.xls 文件 (补充文件 17)。
- 使用公式 1-3 计算长度 (l)、长度变化 (Δl) 和应变百分比:
 (1)
(1)
其中 li是任意时间点任意两个标记之间的距离; x1i, y1i, z1i 是两个标记之一的 3D 坐标; x2i、 y2i、 z2i 是第二个标记的 3D 坐标。 (2)
(2)
其中 li是任意时间点任意两个标记之间的距离, lo 是原始/零时间点任意两个标记之间的距离。 (3)
(3)
其中 Δli是任何时间点两个标记之间的长度变化, lo是原始/零时间点任意两个标记之间的距离。
结果
使用所描述的方法,可以获得各种输出文件。DLTdv7.m *_xyzpts.csv(补充文件 12)包含每个时间范围内每个跟踪点的 (x, y, z) 坐标(以毫米为单位),进一步用于计算拉伸 PN 的长度、长度变化和应变。拉伸 PN 的代表性长度-时间、长度-时间变化和应变-时间图如图 10 所示。拉伸的 PN 有一个插入标记、沿其长度的四个标记和一个由六段组成的夹标记。通过量化拉...
讨论
报告因牵拉损伤而导致周围神经 (PN) 生物力学特性的研究各不相同,这种变化可归因于测试方法,例如测试设备和伸长率分析 5,6,7,8,9,10,11,12,13,14,16,24
披露声明
作者没有需要披露的利益冲突。
致谢
这项研究得到了美国国立卫生研究院 Eunice Kennedy Shriver 国家儿童健康与人类发展研究所的资助,奖号为 R15HD093024 和 R01HD104910A 以及 NSF CAREER 奖1752513号。
材料
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
参考文献
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。