Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Transformación lineal directa para la medición de la tensión de los nervios periféricos in situ durante el estiramiento
En este artículo
Resumen
Este protocolo implementa un sistema de cámara de imagen estereoscópica calibrado mediante transformación lineal directa para capturar desplazamientos tridimensionales in situ de nervios periféricos estirados. Al capturar estos desplazamientos, se puede determinar la tensión inducida en diversos grados de estiramiento, informando los umbrales de lesión por estiramiento que pueden avanzar en la ciencia de la reparación nerviosa dependiente del estiramiento.
Resumen
Los nervios periféricos experimentan un estiramiento fisiológico y no fisiológico durante el desarrollo, el movimiento normal de las articulaciones, las lesiones y, más recientemente, mientras se someten a una reparación quirúrgica. Comprender la respuesta biomecánica de los nervios periféricos al estiramiento es fundamental para comprender su respuesta a diferentes condiciones de carga y, por lo tanto, para optimizar las estrategias de tratamiento y las intervenciones quirúrgicas. Este protocolo describe en detalle el proceso de calibración del sistema de cámara de imagen estereoscópica mediante transformación lineal directa y el seguimiento del desplazamiento tridimensional del tejido in situ de los nervios periféricos durante el estiramiento, obtenido a partir de las coordenadas tridimensionales de los archivos de vídeo capturados por el sistema de cámara de imagen estereoscópica calibrado.
A partir de las coordenadas tridimensionales obtenidas, se puede calcular la longitud del nervio, el cambio en la longitud del nervio y el porcentaje de deformación con respecto al tiempo para un nervio periférico estirado. El uso de un sistema de cámara de imagen estereoscópica proporciona un método no invasivo para capturar desplazamientos tridimensionales de los nervios periféricos cuando se estiran. La transformación lineal directa permite reconstrucciones tridimensionales de la longitud de los nervios periféricos durante el estiramiento para medir la deformación. En la actualidad, no existe una metodología para estudiar la deformación in situ de los nervios periféricos estirados utilizando un sistema de cámara de imagen estereoscópica calibrado mediante transformación lineal directa. Capturar la tensión in situ de los nervios periféricos cuando se estiran no solo puede ayudar a los médicos a comprender los mecanismos de lesión subyacentes del daño nervioso cuando se estiran demasiado, sino que también ayuda a optimizar las estrategias de tratamiento que se basan en intervenciones inducidas por el estiramiento. La metodología descrita en el artículo tiene el potencial de mejorar nuestra comprensión de la biomecánica de los nervios periféricos en respuesta al estiramiento para mejorar los resultados de los pacientes en el campo del tratamiento y la rehabilitación de lesiones nerviosas.
Introducción
Los nervios periféricos (NP) se estiran durante el desarrollo, el crecimiento, el movimiento normal de las articulaciones, las lesionesy la cirugía. Las NP muestran propiedades viscoelásticas para proteger el nervio durante los movimientos regulares 2,3 y mantener la salud estructural de sus fibras nerviosas2. Debido a que se ha demostrado que la respuesta de la NP al estiramiento mecánico depende del tipo de daño de las fibras nerviosas4, las lesiones a los tejidos conectivos adyacentes 2,4 y los enfoques de prueba (es decir, la tasa o dirección de carga)5,6,7,8,9,10,11,12,13,14, es esencial distinguir las respuestas biomecánicas de las NP durante el rango normal de movimiento frente al rango no fisiológico a velocidades de estiramiento lentas y rápidas. Esto puede mejorar la comprensión del mecanismo de lesión de la NP en respuesta al estiramiento y ayudar a una intervención oportuna y optimizada 1,4,15,16. Ha habido una tendencia creciente en fisioterapia a evaluar e intervenir a partir de la relación entre la fisiología nerviosa y la biomecánica17. Al comprender las diferencias en la biomecánica de la NP a diversas cargas aplicadas, los fisioterapeutas pueden estar mejor preparados para modificar las intervenciones actuales17.
Los datos biomecánicos disponibles de las NP en respuesta al estiramiento siguen siendo variables y pueden atribuirse a los equipos y procedimientos de prueba y a las diferencias en el análisis de datos de elongación 5,6,7,8,9,10,11,12,13,14,16. Además, la medición tridimensional (3D) del desplazamiento nervioso in situ sigue estando mal descrita en la literatura actualmente disponible. Estudios previos han utilizado técnicas de imagen estereoscópica para maximizar la precisión de la reconstrucción 3D del desplazamiento tisular de las cápsulas de las articulaciones facetarias18,19. La técnica de transformación lineal directa (DLT) permite la conversión de dos o más vistas bidimensionales (2D) a coordenadas 3D del mundo real (es decir, en mm)20,21,22. DLT proporciona un método de calibración de alta precisión para sistemas de cámaras de imagen estereoscópica porque permite la reconstrucción precisa de las posiciones 3D, teniendo en cuenta la distorsión de la lente, los parámetros de la cámara y las coordenadas de la imagen, y permite flexibilidad en la configuración de la cámara de imagen estereoscópica 20,21,22. Los estudios que utilizan sistemas de cámaras estereoscópicas calibrados por DLT se utilizan normalmente para estudiar el análisis de la locomoción y la marcha22,23. Este protocolo tiene como objetivo ofrecer una metodología detallada para determinar la deformación in situ de las NP en diversos grados de estiramiento utilizando un sistema de cámara de imagen estereoscópica calibrado por DLT y un software de seguimiento de código abierto22.
Protocolo
Todos los procedimientos descritos fueron aprobados por el Comité Institucional de Cuidado y Uso de Animales (IACUC) de la Universidad de Drexel. El lechón neonatal fue adquirido de una granja aprobada por el Departamento de Agricultura de los Estados Unidos (USDA) ubicada en Pensilvania, EE. UU.
1. Configuración del sistema de imagen estereoscópica
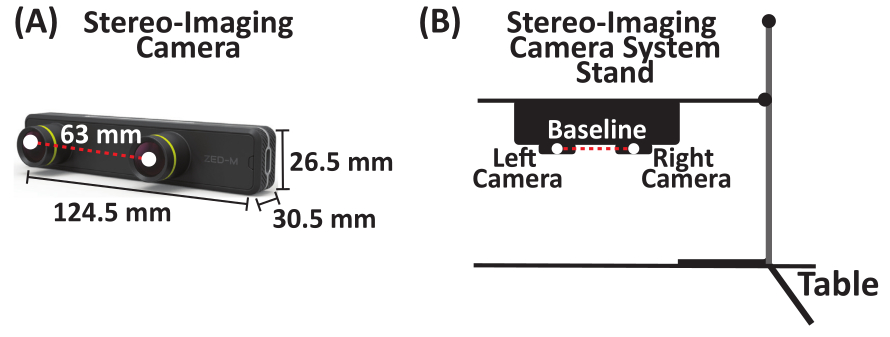
- Conecte un sistema de cámara de imagen estéreo que capture hasta 100 fotogramas por segundo (FPS) a un soporte utilitario. El sistema de cámaras estereoscópicas utilizado en este estudio es una cámara estereoscópica pasiva con dos cámaras alineadas horizontalmente (denominadas cámaras izquierda y derecha) separadas por una línea de base de 63 mm (Figura 1).

Figura 1: Sistema de cámaras de imagen estereoscópica. (A) Sistema de cámara de imagen estereoscópica en paralelo con dos cámaras (cámara izquierda y derecha) separadas por una línea de base de 63 mm. (B) Esquema del sistema de cámara de imagen estereoscópica y la configuración del soporte. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
2. Sistema de imagen estereoscópica DLT Calibración-digitalización del volumen de control 3D
- Obtenga tres láminas cuadradas de plexiglás acrílico transparente (12 pulgadas x 12 pulgadas x 0,125 pulgadas). En cada hoja, coloque una cuadrícula y dibuje al menos 10 puntos, lo que da como resultado un mínimo de 30 puntos distribuidos por el volumen de control 3D en los planos de coordenadas x, y y z. Construya el volumen de control 3D apilando las tres hojas a diferentes alturas para capturar la altura máxima de lo que se registrará (Figura 2A).
- Digitalice todos los puntos del volumen de control 3D utilizando un digitalizador con pedal. Adquiera las coordenadas x, y y z (en mm) (Figura 2B) estableciendo el origen (0, 0, 0) en el cubo de control 3D, definiendo las direcciones x e y positivas, abriendo un documento para guardar las coordenadas digitalizadas (x, y, z) (en mm) de cada punto y guardando las coordenadas (x, y, z) (en mm) como un archivo *.csv.
NOTA: Las coordenadas (x, y, z) son relativas al origen establecido en el cubo de control 3D. - Utilice estas coordenadas digitalizadas (x, y, z) (en mm) para calibrar las cámaras izquierda y derecha del sistema de cámaras de imagen estereoscópica, respectivamente.

Figura 2: Volumen de control tridimensional y digitalizador con pedal. (A) Esquema del volumen de control 3D. (B) Componentes del digitalizador con pedal utilizado para digitalizar el volumen de control 3D para obtener coordenadas (x, y, z) en mm. Abreviatura: 3D = tridimensional. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
3. Calibración del sistema de cámaras de imagen estereoscópica-generación de coeficientes de transformación lineal directa
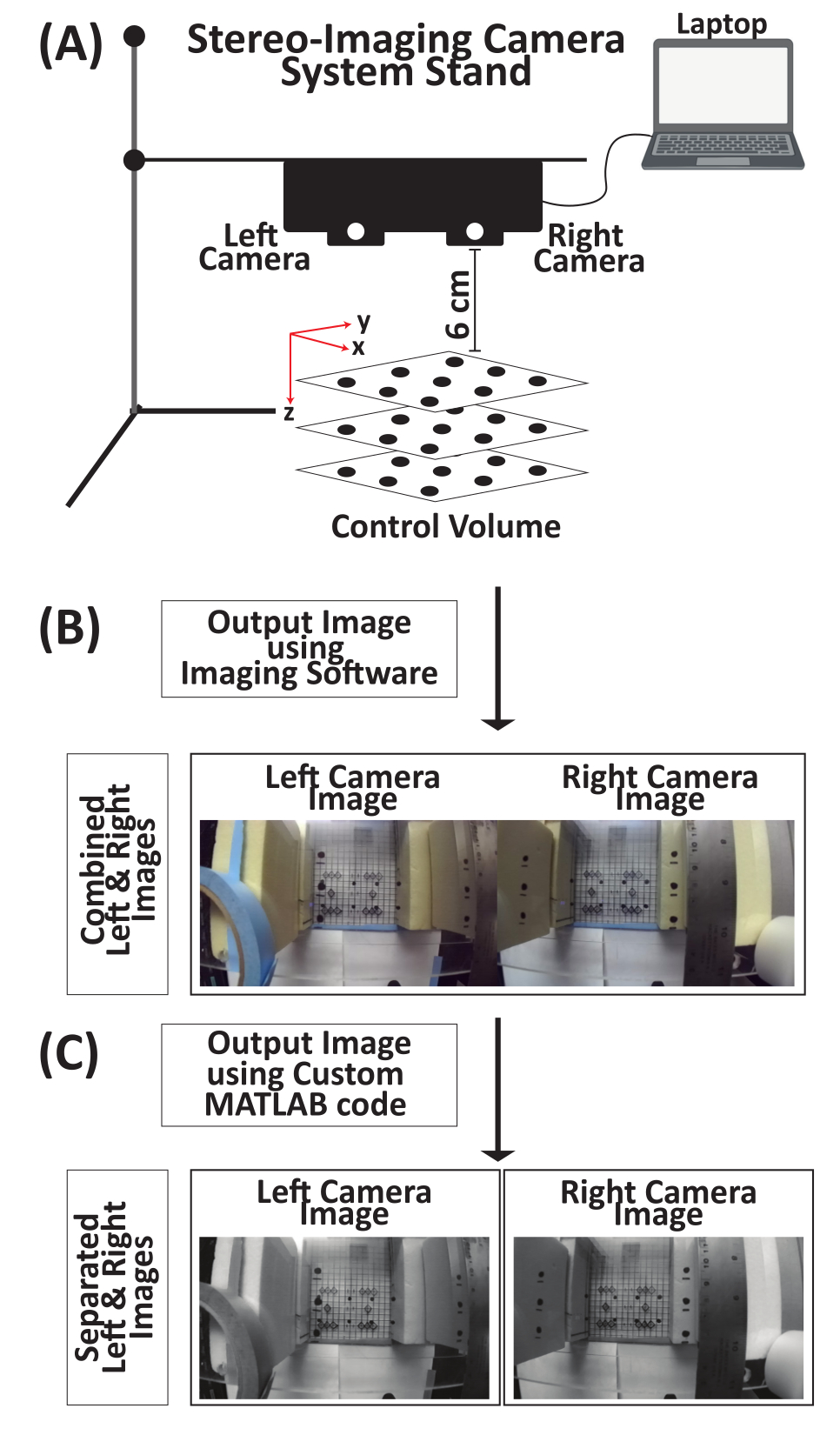
- Conecte el sistema de cámara de imágenes estereoscópicas a un soporte de utilidad (Figura 3A).
- Coloque el sistema de cámara de imagen estereoscópica a 6 cm por encima del volumen de control 3D (Figura 3A).
- Conecte el sistema de cámara de imagen estéreo a una computadora portátil a través de un cable USB tipo C.
- Abra el software de imágenes (consulte la Tabla de materiales).
- Imagine el volumen de control 3D. La imagen de salida (Figura complementaria S1) incluye las vistas de la cámara izquierda y derecha (Figura 3B).
- Ejecute el código personalizado de MATLAB (archivo complementario 1) para separar la imagen de salida en dos imágenes, imágenes izquierda y derecha, respectivamente (Figura 3C, Figuras complementarias S2 y Figuras complementarias S3, respectivamente).
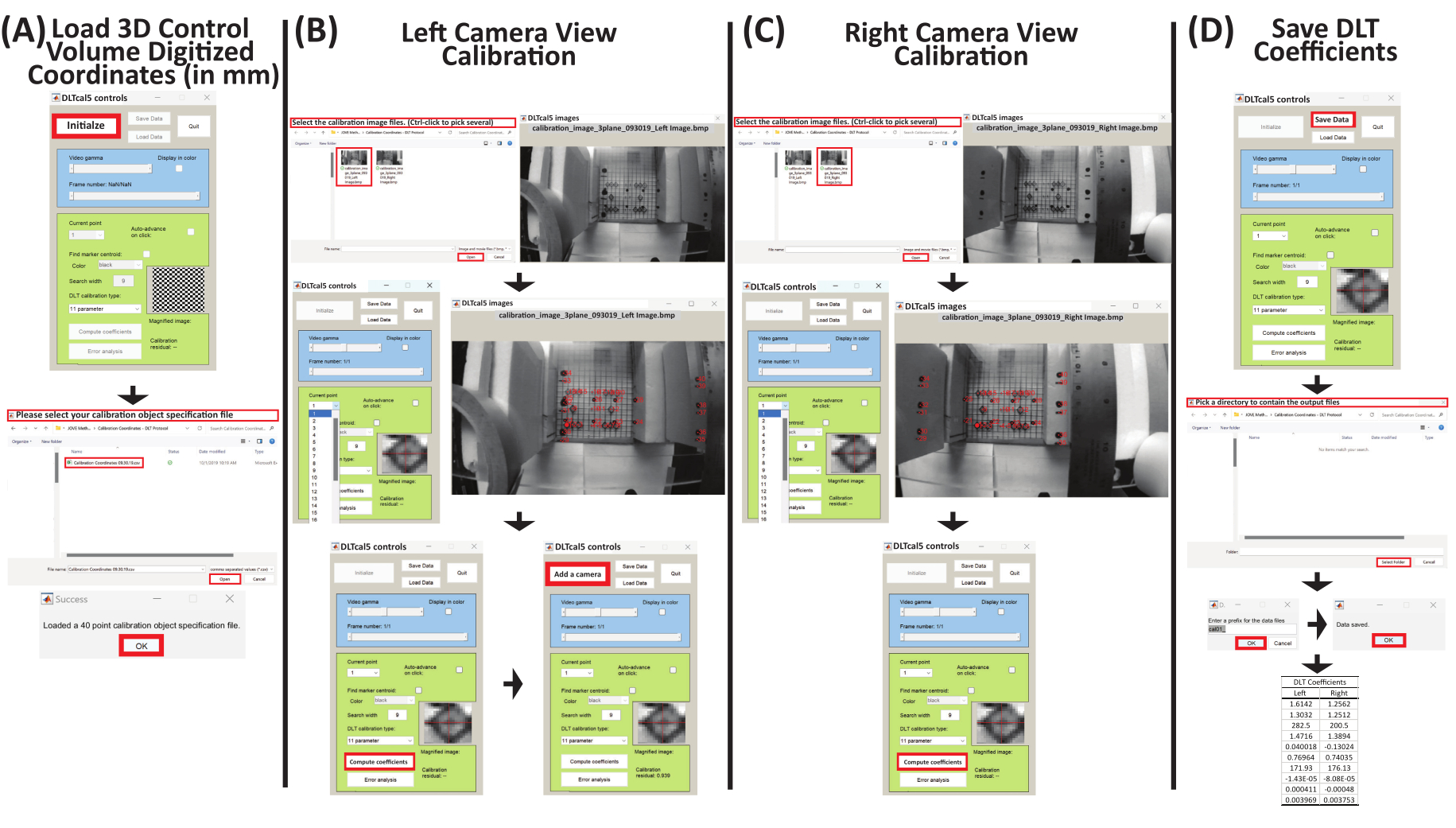
- Haga clic en Ejecutar para inicializar la GUI 22 de DLTcal5.m (archivo complementario 2).
- Haga clic en inicializar en la ventana de controles de DLTcal5 para seleccionar el archivo *.csv con las coordenadas digitalizadas (x, y, z) (en mm) (Figura 4A y Archivo complementario 3).
- Seleccione la imagen correspondiente del volumen de control 3D de la primera vista del sistema de cámara de imagen estereoscópica (Figura complementaria S2). Para este sistema de cámara de imagen estereoscópica, la vista de la cámara izquierda corresponde a la primera vista de la cámara (Figura 4B).
- Aparece la primera imagen de la vista de la cámara (es decir, la vista de la cámara izquierda).
- Seleccione los puntos en el orden en que se digitalizaron en la Sección 2 para obtener las coordenadas de píxeles 2D de la vista de la cámara izquierda (Figura 4B).
- Establezca el punto actual en la ventana de controles de DLTcal5 y haga clic en el punto actual correspondiente en la primera imagen cargada de la vista de cámara (es decir, la vista de la cámara izquierda).
- Después de seleccionar todos los puntos en la primera vista de cámara cargada, haga clic en calcular coeficientes para generar los 11 coeficientes DLT para la vista de cámara izquierda (Figura 4B).
- Haga clic en agregar una cámara en la ventana de controles de DLTcal5 y repita los pasos 3.7.2-3.7.6 para generar los 11 coeficientes DLT para la vista de cámara correcta (es decir, la segunda vista de cámara) (Figura 4B, C y Figura complementaria S3).
- Haga clic en guardar datos en la ventana de controles de DLTcal5 para seleccionar la carpeta donde se guardarán los archivos de salida (Figura 4D).
- Los archivos de salida incluyen las coordenadas de píxeles 2D (x, y) (Archivo complementario 4) y los 11 coeficientes DLT correspondientes para las vistas de cámara izquierda y derecha del sistema de cámara de imagen estéreo (Figura 4D y archivo complementario 5).
- El sistema de cámara de imagen estereoscópica está calibrado.

Figura 3: Esquema para adquirir una imagen de volumen de control tridimensional utilizando un sistema de cámara de imagen estereoscópica para la calibración de transformación lineal directa. (A) Conecte el sistema de cámara de imagen estereoscópica a un soporte y luego conéctelo a una computadora portátil a través de un cable USB tipo C. Coloque el volumen de control 3D a 6 cm debajo del sistema de cámara estereoscópica. (B) Usando el software de imágenes, tome una imagen del volumen de control 3D. La imagen de salida es una imagen combinada de las cámaras izquierda y derecha. (C) Utilizando un código de MATLAB personalizado, la imagen de salida combinada se separa en imágenes individuales izquierda y derecha del volumen de control 3D. Abreviatura: 3D = tridimensional. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Esquema para generar coeficientes de transformación lineal directa para vistas de cámara izquierda y derecha de un sistema de imágenes de cámara estereoscópica. (A) Ejecute DLTcal5.m22, haga clic en inicializar en la ventana de controles y seleccione el archivo *.csv con las coordenadas digitalizadas (x, y, z) (en mm) del volumen de control 3D. (B) Seleccione la imagen de calibración de la vista izquierda de la cámara. A continuación, seleccione los puntos de la imagen en el mismo orden en que se digitalizaron. A continuación, haga clic en calcular coeficientes para generar los coeficientes DLT para la vista de cámara izquierda. A continuación, haga clic en Agregar cámara para repetir los pasos para la vista de cámara correcta. (C) Seleccione la imagen de calibración de la vista de cámara derecha. A continuación, seleccione los puntos de la imagen en el mismo orden en que se digitalizaron. A continuación, haga clic en calcular coeficientes para generar los coeficientes DLT para la vista de cámara derecha. (D) Haga clic en Guardar datos para seleccionar el directorio para guardar los coeficientes DLT para las vistas de cámara izquierda y derecha. Introduzca el nombre del archivo de salida y haga clic en Aceptar y los coeficientes DLT se guardarán como un archivo *.csv. Abreviatura: 3D = tridimensional y DLT = transformación lineal directa. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
4. Adquisición de datos
- Colocar el lechón Yorkshire neonatal anestesiado (3-5 días de edad) en posición supina con las extremidades superiores en abducción para exponer la región axilar. Haga una incisión en la línea media a través de la piel y la fascia que recubre la tráquea hasta el tercio superior del esternón.
- Use la disección roma para exponer los nervios del plexo braquial.
- Rocíe solución salina sobre el nervio del plexo braquial expuesto para mantenerlos hidratados antes, durante y después de la prueba.
- Corte el extremo distal de un plexo braquial PN y sujételo al aparato de prueba mecánica.
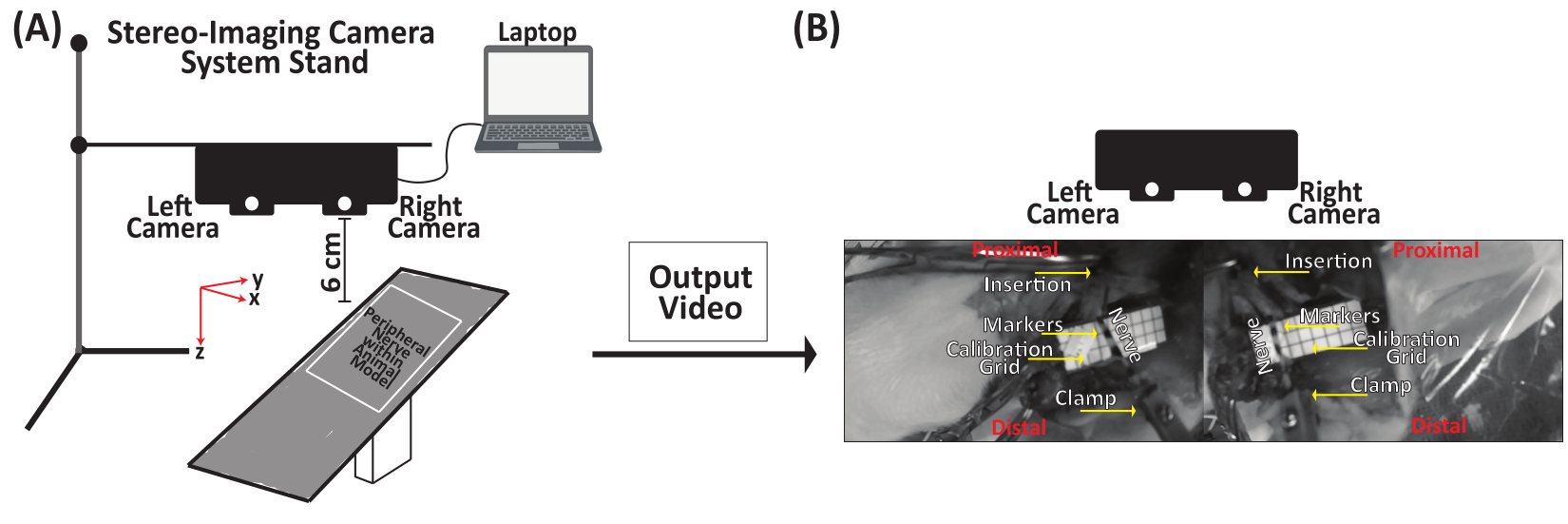
- Conecte el sistema de cámara de imagen estereoscópica al soporte utilitario, colóquelo hasta 6 cm por encima de la PN que se va a estirar y, a continuación, conecte el sistema de cámara de imagen estereoscópica a una computadora portátil a través de un cable USB tipo C (Figura 5A).
- Utilice un marcador cutáneo a base de tinta para colocar marcadores en los sitios de inserción y pinza y de dos a cuatro marcadores adicionales a lo largo de la NP dependiendo de la longitud del nervio, para el seguimiento del desplazamiento (Figura 5B).
- Coloque una cuadrícula de calibración (es decir, una cuadrícula laminada con cuadrados de 0,5 cm x 0,5 cm) y una regla de 1 cm, plana debajo de la NP para el análisis de datos (Figura 5B).
- Registre la longitud inicial de la NP después de la pinza y justo antes del estiramiento.
- Estire el PN a una velocidad de desplazamiento de 500 mm/min hasta el fallo o un estiramiento predeterminado.

Figura 5: Esquema representativo para la adquisición de datos del estiramiento de los nervios periféricos. (A) Conecte el sistema de cámara de imagen estereoscópica a un soporte y luego conéctelo a una computadora portátil a través de un cable USB tipo C. Coloque el sistema de cámara estereoscópica hasta 6 cm por encima del nervio periférico. (B) El nervio periférico se sujeta a la configuración mecánica en el extremo distal. Usando un marcador de piel a base de tinta, coloque un marcador en los sitios de inserción y sujeción y de dos a cuatro marcadores adicionales a lo largo de la longitud del nervio. La solución salina se rocía sobre el nervio periférico para mantenerlo hidratado antes, durante y después de la prueba. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
5. Análisis de datos: seguimiento de la trayectoria del marcador
- Ejecute el código personalizado de MATLAB (Archivo complementario 6) para separar el archivo de vídeo de salida (Archivo complementario 7) en dos archivos de vídeo, archivos de vídeo de la cámara izquierda y derecha (Archivo complementario 8 y Archivo complementario 9, respectivamente).
- Clic Correr Para inicializar el archivo DLTdv7.m22 GUI (Legajo Complementario 10).
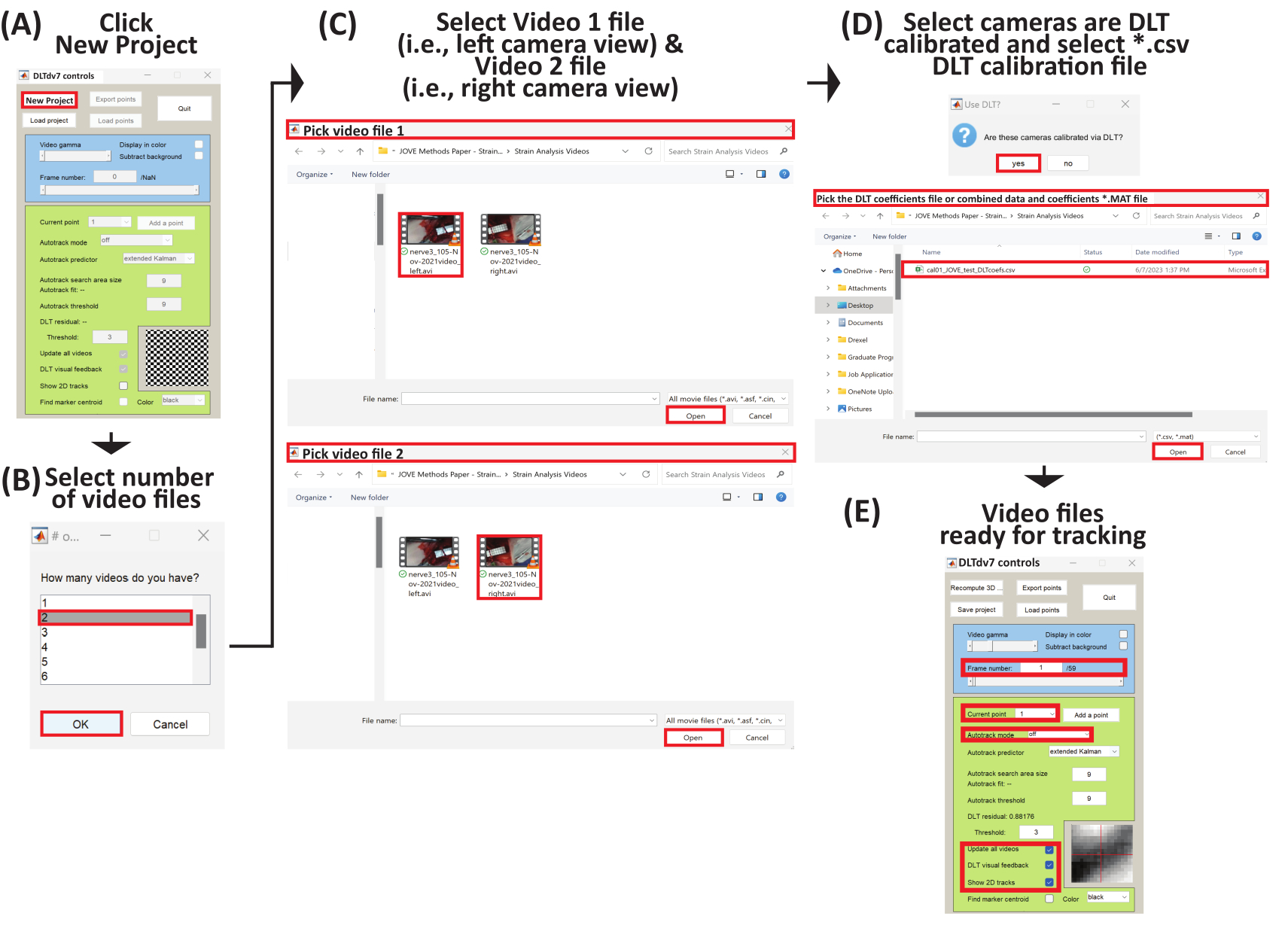
- Aparece la ventana de controles DLTdv7 y se habilitan los botones nuevo proyecto, cargar proyecto y salir (figura 6A).
- Haga clic en nuevo proyecto en la ventana de controles DLTdv7 para comenzar un nuevo proyecto.
- Cuando aparezca un cuadro de diálogo, seleccione 2 para indicar dos archivos de video (es decir, vistas de cámara izquierda y derecha) para rastrear las trayectorias de los marcadores de desplazamiento en un nervio periférico estirado (Figura 6B).
- Seleccione el primer archivo de video (es decir, Video 1), que es el archivo de video de la vista de cámara izquierda (Archivo complementario 8), y haga clic en abrir (Figura 6C). A continuación, seleccione el segundo archivo de vídeo (es decir, Vídeo 2), que es el archivo de vídeo de la vista de cámara derecha (Archivo complementario 9), y haga clic en Abrir (Figura 6C).
- Una vez seleccionados los dos archivos de vídeo, haga clic en Sí para indicar que los archivos de vídeo se adquirieron a partir de vistas de cámara calibradas mediante DLT.
- Seleccione los coeficientes DLT correspondientes *.csv archivo (Archivo suplementario 5) para el sistema de cámara de imagen estereoscópica y haga clic en abrir (Figura 6D).
- Los fotogramas de vídeo iniciales se muestran desde ambos archivos de vídeo y se activa el resto de la ventana de controles DLTdv7 . El botón de nuevo proyecto se reemplaza por el botón de recalcular puntos 3D y el botón de carga de proyecto se reemplaza por el botón de guardar (Figura 6E).
- En la ventana de controles de DLTdv7 , asegúrese de que el número de fotograma esté en 1, que el punto actual esté establecido en 1, que el modo de seguimiento automático esté desactivado y que la actualización de todos los vídeos, la retroalimentación visual de DLT y la visualización de pistas 2D estén activadas (Figura 6E).
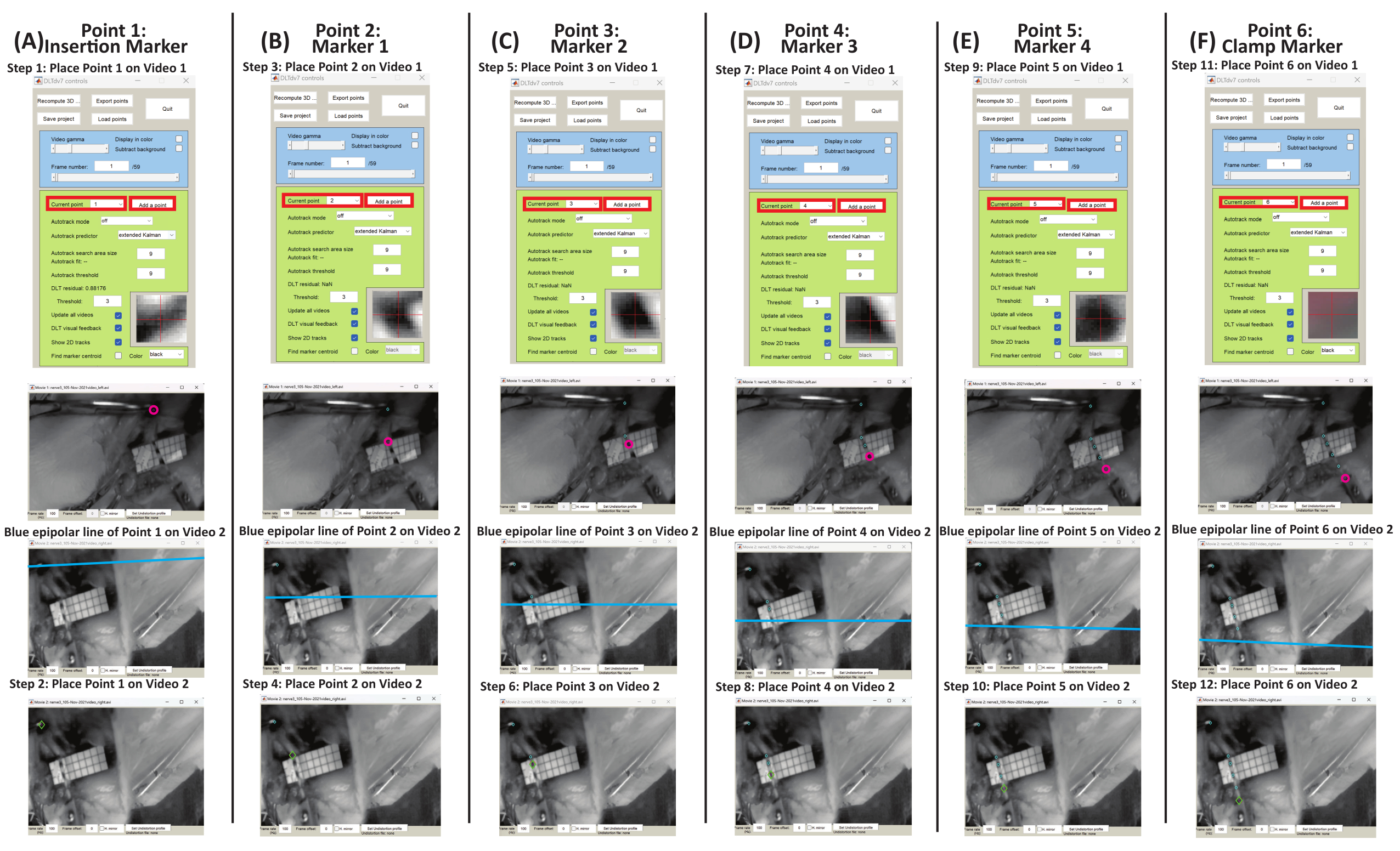
- Asegúrese de que los puntos de seguimiento estén colocados en los marcadores de desplazamiento de la PN de modo que el marcador de inserción corresponda al punto 1, el marcador 1 al punto 2, y así sucesivamente, siendo el marcador de abrazadera el punto final.
- Coloque el punto 1 en el marcador de inserción en el vídeo 1 (es decir, el archivo de vídeo de la vista de la cámara izquierda) asegurándose de que el punto colocado esté en el centro del marcador de inserción. Utilice los métodos abreviados de teclado (Tabla 1) para mover el punto colocado al centro del marcador de inserción (Figura 7A).
- Debido a que se verifica la retroalimentación visual de DLT , cuando se coloca un punto en el Video 1, aparece una línea epipolar azul en el Video 2 (es decir, el archivo de video de vista de la cámara derecha) (Figura 7). Coloque el punto 1 en el marcador de inserción en el vídeo 2 utilizando la línea epipolar azul como referencia. Utilice los métodos abreviados de teclado (Tabla 1), según sea necesario, para mover el punto colocado al centro del marcador de inserción (Figura 7A).
- Haga clic en agregar un punto en la ventana de controles DLTdv7 para agregar puntos en los otros marcadores de tejido para realizar un seguimiento de sus trayectorias. Consulte el punto actual en la ventana de controles DLTdv7 para saber qué punto está activo.
- Haga clic en Agregar un punto. Coloque el punto 2 en el marcador 1 en el video 1. Utilice la línea epipolar azul y los métodos abreviados de teclado para colocar el punto 2 en el marcador 1 en el vídeo 2. Continúe agregando y colocando puntos, primero en el Video 1 y luego en el Video 2, para todos los marcadores de desplazamiento a lo largo de la longitud del nervio entre la inserción y la pinza (es decir, el punto final) (Figura 7B-F).
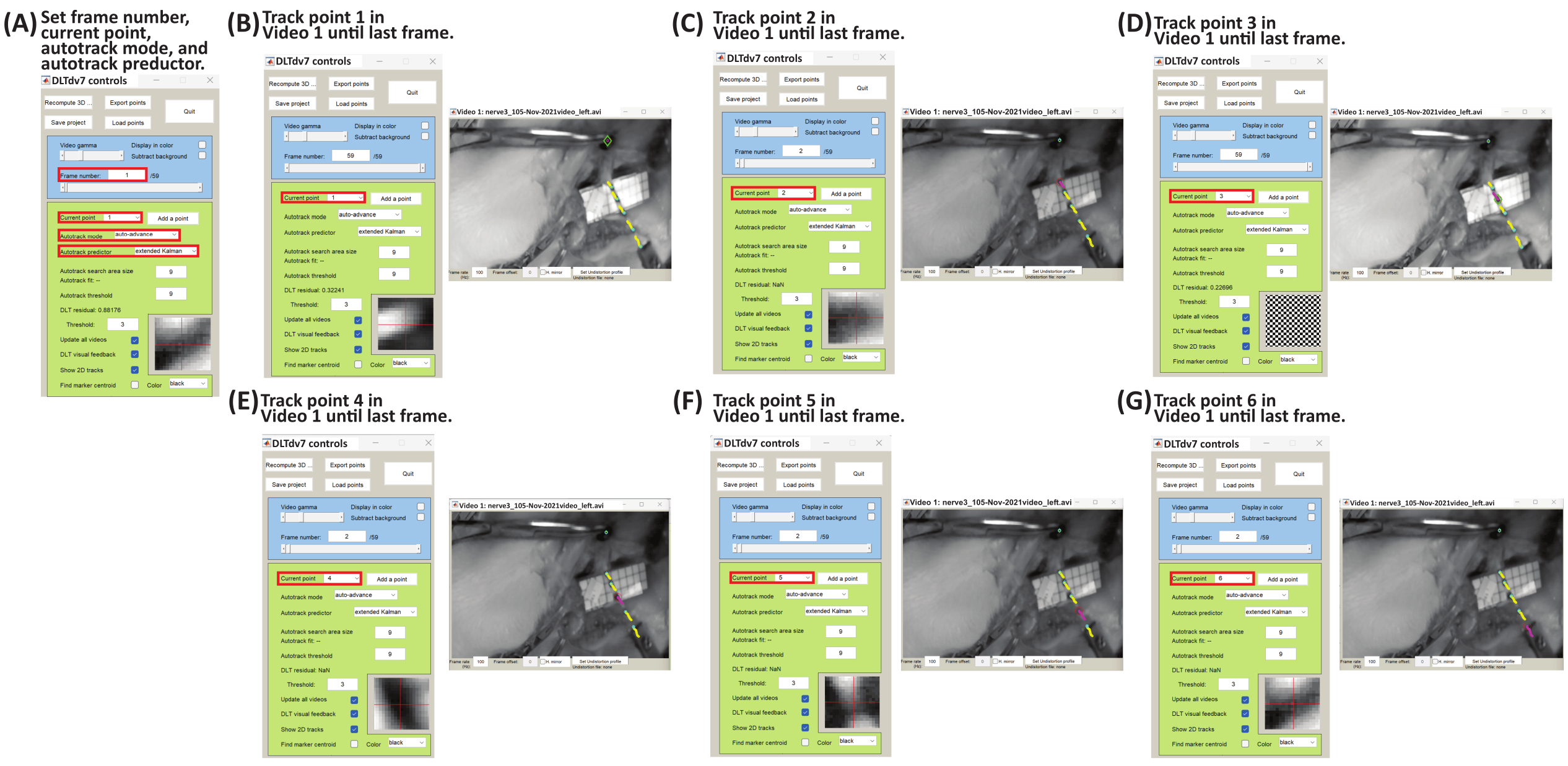
- Una vez que todos los puntos iniciales se hayan colocado en el vídeo 1 y el vídeo 2 (es decir, los archivos de vídeo de la cámara izquierda y derecha, respectivamente), asegúrese de que el número de fotograma esté en 1 y que el punto actual esté establecido en 1 en la ventana de controles de DLTdv7 .
- En la ventana de controles de DLTdv7 , cambie el modo de seguimiento automático a avance automático en el menú desplegable y el predictor de seguimiento automático a Kalman extendido en el menú desplegable (Figura 8A).
- Complete primero el seguimiento de todos los puntos colocados en el vídeo 1 y, a continuación, complete el seguimiento en el vídeo 2. Siga la trayectoria del marcador haciendo clic con el botón izquierdo en el centro del marcador fotograma a fotograma hasta que se produzca un fallo (es decir, fotograma antes de la ruptura macroscópica del nervio periférico) o la totalidad del vídeo durante un estiramiento predeterminado.
- Comience a rastrear el punto 1 en el video 1. Acérquese y aléjese (Tabla 1) según lo desee para asegurarse de que el seguimiento esté en el centro del marcador; haga clic fotograma a fotograma hasta que se produzca el error o el final del vídeo (Figura 8B). Después de completar el seguimiento del punto 1 en el vídeo 1, vuelva al fotograma 1 y cambie el punto actual al punto 2 desde el menú desplegable de la ventana de controles de DLTdv7 . El punto rastreado anterior se volverá azul claro y su trayectoria se volverá amarilla. El punto actual tendrá un diamante verde y un centro rosa.
- Complete el seguimiento de todos los puntos del vídeo 1 haciendo clic con el botón izquierdo fotograma a fotograma de cada punto hasta el fallo o el final del vídeo (Figura 8C-G).
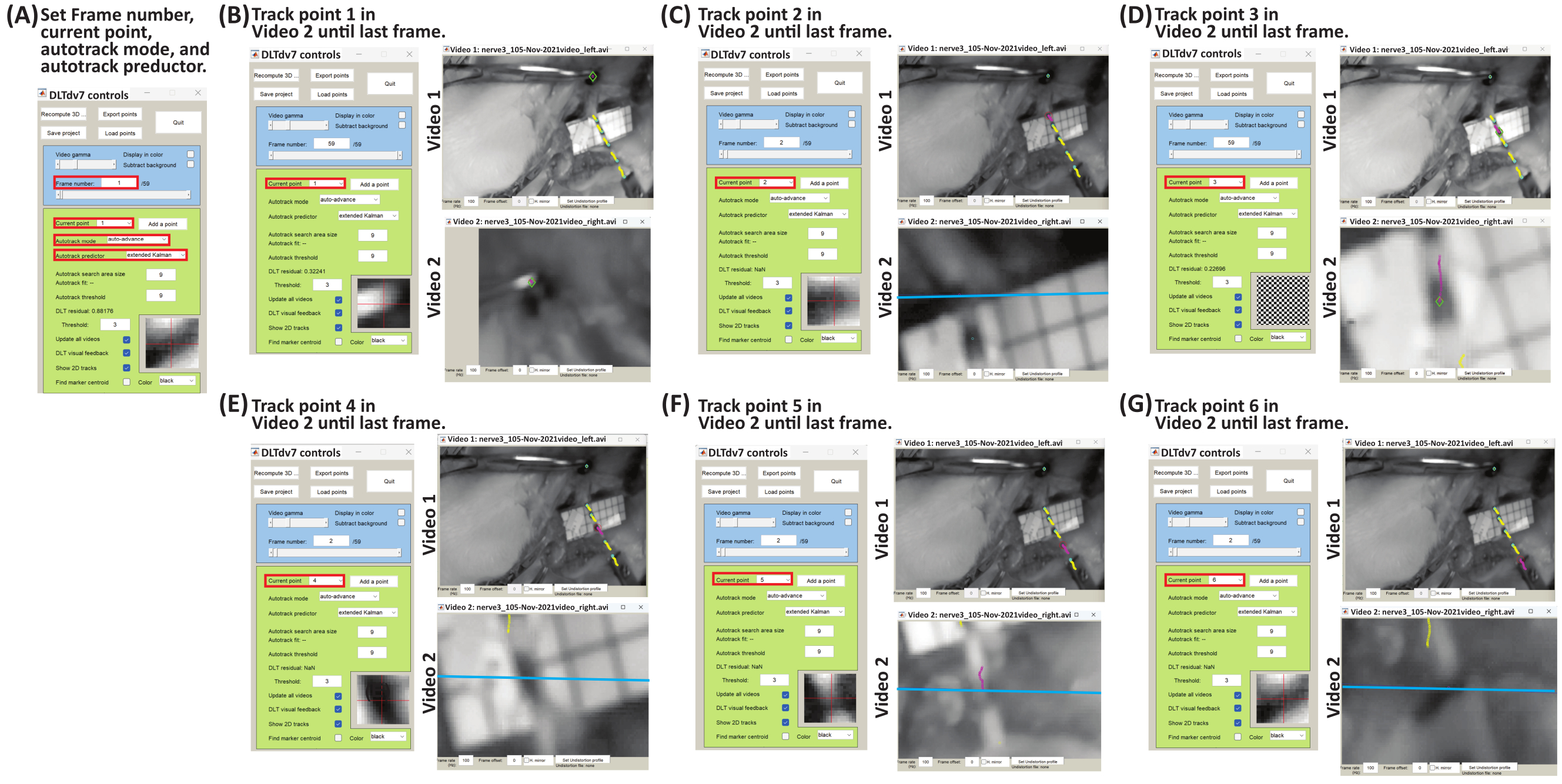
- En el video 2, use la línea epipolar azul para rastrear puntos en referencia al video 1 (Figura 9). En la ventana de controles DLTdv7 , devuelva el número de fotograma a 1 y establezca el punto actual en 1, y comience a realizar el seguimiento de la trayectoria del punto 1 en el vídeo 2.
- Siga los mismos pasos (5.2.16-5.2.18) para realizar un seguimiento de los puntos restantes en el vídeo 2.
- Una vez completado el seguimiento en Vídeo 1 y Vídeo 2, haga clic en exportar puntos en la ventana de controles DLTdv7 para exportar las coordenadas (x, y, z) (en mm) de los puntos de seguimiento.
- Aparecerá un cuadro de diálogo para seleccionar el directorio donde guardar los archivos de salida. Haga clic en la ubicación del directorio.
- Aparece otro cuadro de diálogo para establecer el nombre de los archivos de salida. Establezca el nombre de los archivos de salida (es decir, nerve1_101-Jan-2001videoanalyzed_cal09.30_trial1_).
- Aparece otro cuadro de diálogo. Seleccione el formato de guardado como plano.
- Aparece otro cuadro de diálogo. Seleccione no para calcular el intervalo de confianza del 95%.
- Aparece un cuadro de diálogo final que muestra que los datos se exportan y guardan, y los cuatro archivos de salida se exportan a la ubicación del directorio seleccionado (Archivo complementario 11, Archivo complementario 12, Archivo complementario 13 y Archivo complementario 14).
- Haga clic en Guardar proyecto en la ventana de controles DLTdv7 para guardar el proyecto actual (archivo complementario 15) en el mismo directorio que los archivos de salida.

Figura 6: Esquema para configurar un nuevo proyecto para comenzar el seguimiento de trayectorias tridimensionales. (A) Ejecute DLTdv7.m22 y haga clic en Nuevo proyecto para comenzar un nuevo proyecto. (B) Seleccione 2 como el número de archivos de video. (C) Seleccione el archivo de vídeo 1 (es decir, la vista de la cámara izquierda) y, a continuación, seleccione el archivo de vídeo 2 (es decir, la vista de la cámara derecha). (D) Seleccione sí, ya que los archivos de vídeo proceden de un sistema de cámara de imagen estéreo calibrado con DLT. A continuación, seleccione el archivo *.csv que contiene los coeficientes DLT. (E) Los archivos de vídeo seleccionados ya están listos para el seguimiento. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
| Tecla/Clic | Descripción |
| Clic izquierdo | Rastrea la trayectoria de un punto en el fotograma en el que se hace clic |
| (+) Llave | Amplía el fotograma de vídeo actual en el puntero de mosue |
| (-) Llave | Aleja el fotograma de vídeo actual alrededor del puntero de mosue |
| (i) Clave | Mover el punto hacia arriba |
| j) Clave | Mover punto a la izquierda |
| k) Clave | Mover punto a la derecha |
| m) Clave | Mover punto hacia abajo |
Tabla 1: Atajos de teclado y ratón para el seguimiento de la trayectoria del punto.

Figura 7: Esquema para colocar los puntos iniciales en los marcadores de tejido para el Vídeo 1 y el Vídeo 2 utilizando DLTdv7.m22. (A) Establezca el punto actual en 1. Coloque el punto 1 en el marcador de inserción en el vídeo 1. Usando la línea epipolar azul en el video 2, coloque el punto 1 en el marcador de inserción. (B) Establezca el punto actual en 2. Coloque el punto 2 en el marcador 1 en el video 1. Usando la línea epipolar azul en el video 2, coloque el punto 2 en el marcador 1. (C) Establezca el punto actual en 3. Coloque el punto 3 en el marcador 2 en el video 1. Usando la línea epipolar azul en el video 2, coloque el punto 3 en el marcador 2. (D) Establezca el punto actual en 4. Coloque el punto 4 en el marcador 3 en el video 1. Usando la línea epipolar azul en el video 2, coloque el punto 4 en el marcador 3. (E) Establezca el punto actual en 5. Coloque el punto 5 en el marcador 4 en el video 1. Usando la línea epipolar azul en el video 2, coloque el punto 5 en el marcador 4. (F) Establezca el punto actual en 6. Coloque el punto 6 en el marcador de abrazadera en el video 1. Usando la línea epipolar azul en el video 2, coloque el punto 6 en el marcador de abrazadera. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 8: Esquema para el seguimiento de las trayectorias de los puntos de marcador del vídeo 1 utilizando DLTdv7.m22. (A) Establezca el número de fotograma en 1, el punto actual en 1, el modo de seguimiento automático en avance automático y el predictor de seguimiento automático en Kalman extendido. (B) Establezca el punto actual en 1. En el archivo de vídeo 1 , comience a realizar un seguimiento del desplazamiento del marcador de inserción (es decir, el punto 1) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (C) Establezca el número de trama en 1 y el punto actual en 2. En el archivo de vídeo 1 , comience a realizar un seguimiento del desplazamiento del marcador 1 (es decir, el punto 2) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (D) Establezca el número de trama en 1 y el punto actual en 3. En el archivo de vídeo 1 , comience a rastrear el desplazamiento del marcador 2 (es decir, el punto 3) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (E) Establezca el número de trama en 1 y el punto actual en 4. En el archivo de vídeo 1 , comience a rastrear el desplazamiento del marcador 3 (es decir, el punto 4) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (F) Establezca el número de trama en 1 y el punto actual en 5. En el archivo de vídeo 1 , comience a rastrear el desplazamiento del marcador 4 (es decir, el punto 5) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (G) Establezca el número de trama en 1 y el punto actual en 6. En el archivo de vídeo 1 , comience a seguir el desplazamiento del marcador de sujeción (es decir, el punto 6) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 9: Esquema para el seguimiento de las trayectorias de los puntos de marcador del vídeo 2 utilizando DLTdv7.m22. (A) Establezca el número de fotograma en 1, el punto actual en 1, el modo de seguimiento automático en avance automático y el predictor de seguimiento automático en Kalman extendido. (B) Establezca el punto actual en 1. Con la línea epipolar azul del archivo de vídeo 2 , comience a seguir el desplazamiento del marcador de inserción (es decir, el punto 1) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (C) Establezca el número de trama en 1 y el punto actual en 2. Usando la línea epipolar azul en el archivo de video 2 , comience a rastrear el desplazamiento del marcador 1 (es decir, el punto 2) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (D) Establezca el número de trama en 1 y el punto actual en 3. Utilizando la línea epipolar azul del archivo de vídeo 2 , comience a rastrear el desplazamiento del marcador 2 (es decir, el punto 3) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (E) Establezca el número de trama en 1 y el punto actual en 4. Utilizando la línea epipolar azul del archivo de vídeo 2 , comience a rastrear el desplazamiento del marcador 3 (es decir, el punto 4) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (F) Establezca el número de trama en 1 y el punto actual en 5. Con la línea epipolar azul del archivo de vídeo 2 , comience a rastrear el desplazamiento del marcador 4 (es decir, el punto 5) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. (G) Establezca el número de trama en 1 y el punto actual en 6. Usando la línea epipolar azul en el archivo de video 2 , comience a rastrear el desplazamiento del marcador de sujeción (es decir, el punto 6) haciendo clic con el botón izquierdo fotograma a fotograma hasta el último fotograma. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
6. Análisis de datos-análisis de deformación
- Ejecute un código de MATLAB personalizado (archivo complementario 16) para importar las trayectorias de los marcadores 3D (x, y, z) rastreadas (en mm).
- En la ventana de comandos de MATLAB, escriba:
porcentajeTensión, deltaLi, longitudNi, nombre de archivo] = PercentStrain_3D - Introduzca el tiempo de ruptura, por ejemplo, si los archivos de vídeo tienen 59 fotogramas, el tiempo es de 0,59 s; introduzca el número de puntos rastreados y seleccione el archivo *_xyzpts.csv, con las trayectorias 3D (x, y, z) rastreadas (en mm).
- Seleccione el directorio para guardar los gráficos de longitud de salida frente al tiempo (Figura complementaria S4), el cambio en la longitud frente al tiempo (Figura complementaria S5) y la deformación en función del tiempo (Figura complementaria S6) y el archivo *.xls con el tiempo, la longitud, el cambio en la longitud y la deformación (Archivo complementario 17).
- Calcule la longitud (l), el cambio en la longitud (Δl) y el porcentaje de deformación utilizando las ecuaciones 1-3:
 (1)
(1)
Donde lies la distancia entre dos marcadores cualesquiera en cualquier punto del tiempo; x1i, y1i, z1i son las coordenadas 3D de uno de los dos marcadores; y x2i, y2i, z2i son las coordenadas 3D de los segundos marcadores. (2)
(2)
Donde lies la distancia entre dos marcadores cualesquiera en cualquier punto de tiempo, y lo es la distancia entre dos marcadores cualesquiera en el punto de tiempo original/cero. (3)
(3)
Donde Δlies el cambio de longitud entre dos marcadores en cualquier punto de tiempo, y loes la distancia entre dos marcadores cualesquiera en el punto de tiempo original/cero.
Resultados
Utilizando la metodología descrita, se obtienen varios archivos de salida. El DLTdv7.m *_xyzpts.csv (Archivo complementario 12) contiene las coordenadas (x, y, z) en milímetros de cada punto rastreado en cada período de tiempo que se utiliza para calcular la longitud, el cambio de longitud y la deformación del PN estirado. En la Figura 10 se muestran gráficas representativas de tiempo-longitud, cambio en el tiempo-longitud y tiempo de deformación de una PN estirada. El...
Discusión
Los estudios que informan sobre las propiedades biomecánicas de los nervios periféricos (NP) debido a la lesión por estiramiento varían, y esa variación puede atribuirse a las metodologías de prueba, como el equipo de prueba y el análisis de elongación 5,6,7,8,9,10,11,12,13,14,16,24
Divulgaciones
Los autores no tienen conflictos de intereses que revelar.
Agradecimientos
Esta investigación fue financiada por el Instituto Nacional de Salud Infantil y Desarrollo Humano Eunice Kennedy Shriver de los Institutos Nacionales de Salud bajo el Premio Número R15HD093024 y R01HD104910A y el Premio CAREER Número 1752513 de NSF.
Materiales
| Name | Company | Catalog Number | Comments |
| Clear Acrylic Plexiglass Square Sheet | W W Grainger Inc | BULKPSACR9 | Construct three-dimensional control volume |
| Stereo-imaging camera system - ZED Mini Stereo Camera | StereoLabs Inc. | N/A | N/A |
| Imaging Software - ZED SDK | StereoLabs Inc. | N/A | N/A |
| Maintence Software - CUDA 12 | StereoLabs Inc. | N/A | Download to run ZED SDK |
| Camera stand - Cast Iron Triangular Support Stand with Rod | Telrose VWR Choice | 76293-346 | N/A |
| MicroSribe G2 Digitizer with Immersion Foot Pedal | SUMMIT Technology Group | N/A | N/A |
| Proramming Software - MATLAB | Mathworks | N/A | version 2019A or newer |
| DLTcal5.m | Hedrick lab | N/A | Open Source |
| DLTdv7.m | Hedrick lab | N/A | Open Source |
Referencias
- Bueno, F. R., Shah, S. B. Implications of tensile loading for the tissue engineering of nerves. Tissue Engineering Part B: Reviews. 14 (3), 219-233 (2008).
- Grewal, R., Xu, J., Sotereanos, D. G., Woo, S. L. Biomechanical properties of peripheral nerves. Hand Clinics. 12 (2), 195-204 (1996).
- Papagiannis, G., et al. Biomechanical behavior and viscoelastic properties of peripheral nerves subjected to tensile stress: common injuries and current repair techniques. Critical Reviews in Physical and Rehabilitation Medicine. 32 (3), 155-168 (2020).
- Castaldo, J., Ochoa, J. Mechanical injury of peripheral nerves. Fine structure and dysfunction. Clinics in Plastic Surgery. 11 (1), 9-16 (1984).
- Singh, A. Extent of impaired axoplasmic transport and neurofilament compaction in traumatically injured axon at various strains and strain rates. Brain Injury. 31 (10), 1387-1395 (2017).
- Singh, A., Kallakuri, S., Chen, C., Cavanaugh, J. M. Structural and functional changes in nerve roots due to tension at various strains and strain rates: an in-vivo study. Journal of Neurotrauma. 26 (4), 627-640 (2009).
- Singh, A., Lu, Y., Chen, C., Kallakuri, S., Cavanaugh, J. M. A new model of traumatic axonal injury to determine the effects of strain and displacement rates. Stapp Car Crash Journal. 50, 601 (2006).
- Singh, A., Lu, Y., Chen, C., Cavanaugh, J. M. Mechanical properties of spinal nerve roots subjected to tension at different strain rates. Journal of Biomechanics. 39 (9), 1669-1676 (2006).
- Singh, A., Shaji, S., Delivoria-Papadopoulos, M., Balasubramanian, S. Biomechanical responses of neonatal brachial plexus to mechanical stretch. Journal of Brachial Plexus and Peripheral Nerve Injury. 13 (01), e8-e14 (2018).
- Zapałowicz, K., Radek, A. Mechanical properties of the human brachial plexus. Neurologia I Neurochirurgia Polska. 34, 89-93 (2000).
- Zapałowicz, K., Radek, A. . Annales Academiae Medicae Stetinensis. 51 (2), 11-14 (2005).
- Zapałowicz, K., Radek, M. The distribution of brachial plexus lesions after experimental traction: a cadaveric study. Journal of Neurosurgery: Spine. 29 (6), 704-710 (2018).
- Kawai, H., et al. Stretching of the brachial plexus in rabbits. Acta Orthopaedica Scandinavica. 60 (6), 635-638 (1989).
- Marani, E., Van Leeuwen, J., Spoor, C. The tensile testing machine applied in the study of human nerve rupture: a preliminary study. Clinical Neurology and Neurosurgery. 95, 33-35 (1993).
- Lee, S. K., Wolfe, S. W. Peripheral nerve injury and repair. JAAOS-Journal of the American Academy of Orthopaedic Surgeons. 8 (4), 243-252 (2000).
- Rickett, T., Connell, S., Bastijanic, J., Hegde, S., Shi, R. Functional and mechanical evaluation of nerve stretch injury. Journal of Medical Systems. 35, 787-793 (2011).
- Topp, K. S., Boyd, B. S. Structure and biomechanics of peripheral nerves: nerve responses to physical stresses and implications for physical therapist practice. Physical Therapy. 86 (1), 92-109 (2006).
- Lu, Y., Chen, C., Kallakuri, S., Patwardhan, A., Cavanaugh, J. M. Development of an in vivo method to investigate biomechanical and neurophysiological properties of spine facet joint capsules. European Spine Journal. 14 (6), 565-572 (2005).
- Kallakuri, S., et al. Tensile stretching of cervical facet joint capsule and related axonal changes. European Spine Journal. 17 (4), 556-563 (2008).
- Abdel-Aziz, Y. I., Karara, H. M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry. Photogrammetric Engineering & Remote Sensing. 81 (2), 103-107 (2015).
- Pourcelot, P., Audigié, F., Degueurce, C., Geiger, D., Denoix, J. M. A method to synchronise cameras using the direct linear transformation technique. Journal of Biomechanics. 33 (12), 1751-1754 (2000).
- Hedrick, T. L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinspiration & Biomimetics. 3 (3), 034001 (2008).
- Chen, L., Armstrong, C. W., Raftopoulos, D. D. An investigation on the accuracy of three-dimensional space reconstruction using the direct linear transformation technique. Journal of Biomechanics. 27 (4), 493-500 (1994).
- Singh, A., Magee, R., Balasubramanian, S. Methods for in vivo biomechanical testing on brachial plexus in neonatal piglets. Journal of Visualized Experiments. (154), e59860 (2019).
- Black, J., Ellis, T. Multi camera image tracking. Image and Vision Computing. 24 (11), 1256-1267 (2006).
- Cardenas-Garcia, J. F., Yao, H. G., Zheng, S. 3D reconstruction of objects using stereo imaging. Optics and Lasers in Engineering. 22 (3), 193-213 (1995).
- Mahan, M. A., Yeoh, S., Monson, K., Light, A. Rapid stretch injury to peripheral nerves: biomechanical results. Neurosurgery. 85 (1), E137-E144 (2019).
- Rydevik, B. L., et al. An in vitro mechanical and histological study of acute stretching on rabbit tibial nerve. Journal of Orthopaedic Research. 8 (5), 694-701 (1990).
- Mahan, M. A., Warner, W. S., Yeoh, S., Light, A. Rapid-stretch injury to peripheral nerves: implications from an animal model. Journal of Neurosurgery. 133 (5), 1537-1547 (2019).
- Singh, A., Ferry, D., Balasubramanian, S. Efficacy of clinical simulation based training in biomedical engineering education. Journal of Biomechanical Engineering. 141 (12), 121011-121017 (2019).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados