
Method Article
MPI CyberMotion模拟器:一种新型的运动模拟器的执行情况调查三个维度的多感官的路径积分
摘要
介绍一种有效的方式,以获得洞察到人类如何定位自己在三个层面。该方法需要一个运动模拟器运动观察员的方式由传统的模拟器高不可攀的优势。结果证实,被低估了,在水平面运动,垂直运动,而被高估。
摘要
路径积分是自运动是随着时间的推移集成的过程中获得估计当前的位置相对起点1。人类可以做4 2-3视觉,听觉或惯性线索的5只的基础上的整合路径。然而,目前,惯性线索-尤其是动觉-多个线索似乎主宰6-7。在缺乏远见,人类倾向于高估短距离(<5米)和旋转角度(<30°),但低估了较长的5。因此,通过物理空间的运动似乎并不准确代表大脑。
评估在水平面的路径集成大量的工作已经完成,但很少有人知道已知的垂直运动(见3)单从视觉的虚拟运动。原因之一是传统议案模拟器有的议案restric的的小范围特德主要水平面。在这里,我们采取大范围的运动,以评估是否水平和垂直平面之间的整合路径是类似的议案模拟器8-9的优势。路径导航的惯性和视觉线索的相对贡献,同时也评估。
16名观察员坐直改良库卡拟人化的机器人手臂法兰安装一个座位。被操纵的感觉信息,提供视觉(光流,有限的生命星域),前庭动觉(被动的自我运动眼睛闭),或视觉,前庭动觉的议案线索。包括两个部分的长度(1:0.4米,2:1米±0.24米/秒2加速度峰值)水平,矢状和额叶飞机的运动轨迹。两部分的角度是45°或90°。观察家指出,其原产地,通过移动SCRE提出一个头像上叠加的一个箭头恩。
观察员更可能低估了运动在水平面的夹角大小相比垂直面。在额面观察员更容易高估角的大小,而在矢状面有没有这样的偏见。最后,观察员单独前庭动觉信息的基础上回答时的反应较慢。因此,需要根据前庭动觉信息的人的路径整合视觉信息时存在较长。建议的指向是一致的低估和高估的角度,提出分别在水平和垂直平面通过,通过空间自运动神经表示,这可能涉及到的事实,人类的经验运动大多在非对称水平面。
研究方案
1。库卡机器人有限公司
- MPI CyberMotion模拟器由六联合在3-2-1配置的串行机器人( 图1)。它是基于商业库卡Robocoaster(修改后的KR-500配备了一枚500公斤的有效载荷的工业机器人)。物理修改和软件控制结构需要有一个灵活,安全的实验装置,先前已描述,包括运动模拟器的速度和加速度的限制,延迟和传输系统的功能9。从这个先前设置的修改,定义如下。

图1。当前的MPI CyberMotion模拟器工作空间的图形表示。
- 结合横向旋转运动的复杂的运动轨迹是可能MPI CyberMotion模拟器。轴1,4和6 CA连续列印转动。 4对硬件的最终停止在两个方向上的限制,3轴2和5。直线运动的最大射程是强烈依赖从运动开始的位置上。 MPI CyberMotion模拟器最终停止当前的硬件,如表1所示。
轴 范围[度] 最大。速度[deg / s的] 轴1 连续 69 轴2 -128到-48 57 轴3 -45到+92 69 轴4 连续 76 5轴 -58到+58 76 轴6 连续 120
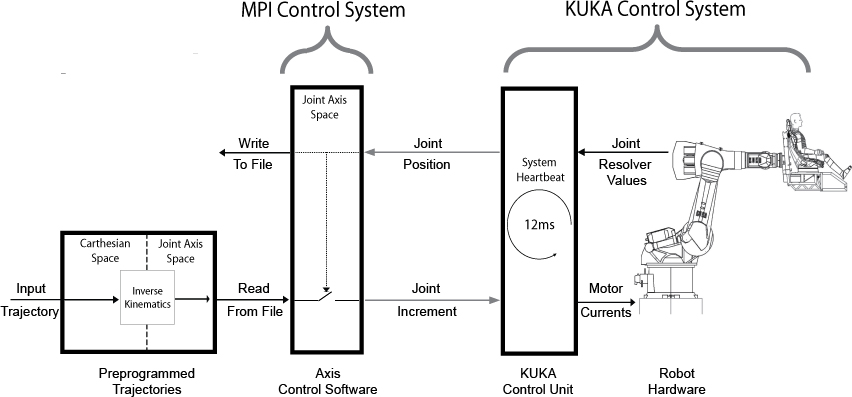
- 前MPI CyberMotion模拟器上进行任何实验,每个实验的运动轨迹,经历了一个库卡模拟PC(办公室PC)上的测试阶段。 “办公电脑”是一个特殊的产品销往库卡模拟真实的机器人手臂,包括相同的操作系统和真正的机器人控制屏幕布局。一个开环配置的MPI CyberMotion模拟器控制系统的示意图,在图2所示。

图2。MPI CyberMotion模拟器开环控制系统原理图概述。 点击这里放大图 。
{kind=link}
- 控制细节tructure可以在这里找到9。总之,开环,如在目前的实验中使用的配置,轨迹是预先设定的输入轨迹在直角坐标系转换通过逆运动学( 图2)关节间隙角度。
- MPI控制系统中读取这些期望关节角增量和发送这些库卡控制系统,电机电流通过执行轴运动。联合解析器值发送到库卡控制系统,目前关节角位置确定为12ms的内部收益率,进而引发未来的合资增量MPI控制系统在从文件读取以及写入目前的联合到磁盘的角度位置。 MPI和KUKA控制系统之间的通信是通过以太网连接使用库卡RSI的协议。
- 配备5点式安全带系统(Schroth谈到)一个赛车座椅(的RECARO杆位)附在底盘WHI通道包括一个脚凳。机箱的安装法兰机器人手臂( 图3a)。实验结果也有可能在一个封闭的机舱座位( 图3b)的参与者。

图3。MPI CyberMotion模拟器设置。 A)配置液晶显示器目前的实验。二)配置要求封闭的机舱与前投影立体显示实验。 C)前投影单色显示屏。 D)头盔显示器。
- 由于在黑暗中进行实验,红外摄像机允许从控制室的视觉监测。
2。可视化
- 多个可视化配置是可能MPI CyberMotion模拟器,包括液晶显示屏,立体声或单声道前投影,头盔显示器( 图3)。对于目前的实验自运动的视觉线索提供一个液晶显示屏放置在前面的人,否则在黑暗中进行测试的观察员50厘米( 图3a)。
- 使用Virtools的4.1软件生成的视觉表现,包括一个随机的,有限的生命时间点场。八个虚拟的单位前,左,右,向上和向下延伸从参与者的角度点(即16×16×8大小的单位)的长方体与20万个大小相等的粒子组成的白色圆圈0.02单位填写在一个黑色的背景前的直径。点随机分布在整个空间(空间内的概率分布均匀)。运动在虚拟单位按比例符合物理运动(1虚拟单位= 1物理米)1比1。
- 每个粒子的两秒钟之前消失,并立即显示在一个空间内随机位置。因此点半改变其在一秒钟内的位置。点之间的距离为0.085和4个单位被显示给参与者(相应的视觉角度:13°和0.3°)。
- 点领域内的运动与物理运动同步接收从MPI控制计算机通过以太网连接使用UDP协议传输的运动轨迹。当通过点场点的移动平均数保持恒定的所有动作。这显示没有绝对规模的,但点光流和运动视差是一个固定大小的领域;寻找小根据它们之间的距离相对观察员。
3。实验设计
- 16名学员,谁是天真的作者之一(MB-C),异常的实验,穿噪音消除耳机配有一个麦克风,让实验者的双向沟通。额外的听觉噪声通过该式耳机连续播放未列明在进一步面具由机器人产生的噪音。
- 与会者用一个定制的操纵杆,配备通过以太网连接使用UDP协议传输数据的响应按钮。
- 两个细分运动的角度为45°或90°。在横向,矢状和额叶飞机的变动包括:向前向右(FR)或向右转(RF),向下远期(DF)的向前或向下(FD)和向下向右(DR)或向右向下(RD),运动( 图4a)。

图4。程序。一)在实验中使用的轨迹示意图。二)提供的信息为每个测试的轨迹类型感官。三)用来指示与会者认为,他们已经从原产地指着任务。rge.jpg“目标=”_blank“>点击这里放大图。
- 提供操纵感觉信息的视觉(光流,有限的生命星域),前庭动觉(被动的自我运动眼睛闭),或视觉和前庭-动觉的议案线索( 图4b)。
- 运动轨迹包括两个部分的长度(1:0.4米,2:1米±0.24米/秒2加速度峰值; 图4b)。轨迹包括翻译。没有旋转的参与者发生。议案前,每个试验,以减少可能出现的干扰,并确保从一个稳定的状态,前庭系统进行了测试,15秒暂停之前,每个轨迹。
- 观察家指出,其原产地,通过移动屏幕上的一个分身( 图4c)上叠加的一个箭头。箭头的运动轨迹的平面约束和控制由T他操纵杆。的化身,是从正面,矢状和水平的观点。观察员被允许使用任何或所有的观点来回答。箭头方向是在随机试验。
- 为指向的任务要求参与者精神转化从自我中心的指向角度到exocentric表示,与会者都指出其原产地之前,实践和实验试验头像的指示。参与者被告知,指出应化身,如果是自己的身体。与会者然后指示指向相对使用的exocentric的测量技术自我的物理目标。例如,参与者被指示,指出他们的圈中途休息之间,并在屏幕上,要求与会者向前和向下的箭头指向相对头像操纵杆。所有与会者都能够执行这些没有表达混乱的任务。
- 每个实验条件下重复3次,并在随机顺序。作为两个独立的3(平面)* 2(角)* 3(方式)重复测量方差分析的因变量签署的错误和响应时间进行了分析。从一个极端离群参与者的响应时间是从分析中删除。
4。代表结果
签署的错误结果是折叠的不同方式和角度,发现这些因素没有显着的主效应。 图5a显示了显着的主效应的运动飞机(F(2,30)= 7.0,P = 0.003)观察员低估角的大小(平均数据比0°以下),在水平面运动(-8.9°,SE 1.8)。在额面观察员平均更可能高估了角的大小(5.3°,SE 2.6),而在矢状面(-0.7°,SE 3.7)有没有这样的偏见。 WHILE的角度和方式的主要影响是不显着,角被发现显着的互动与平面(F(2,30)= 11.1,P <0.001),额面高估运动,通过45°(7.9° SE 2.6)比通过90°(2.8°,SE 2.7),而这样的差异是缺席的其他飞机。此外,模式发现显着的互动与角度(F(2,30)= 4.7,P = 0.017)等,从前庭信息仅通过90°的变动低估明显较大(-4.3°,SE 2.1)相比,视觉(-2.0°,SE 2.4)和前庭和视觉信息的结合(2.3°,SE 2.2)的条件,而这种差异缺席通过45°的变动。没有主体间的效果,重要的是签署的错误(F(1,15)= 0.7,P = 0.432)。 图5b显示响应时间的结果。是一个显着的主效应模式(F(2,28)= 22.6,P <0.001)观察员回应回答时,最慢的基础上前庭动觉信息(11.0 S,SE 1.0)相比,视觉(9.3 S,SE 0.8)和联合(9.0 S,SE 0.8)的条件。也有一个重要的主要影响飞机(F(2,28)= 7.5,P = 0.002)观察员的反应最慢的移动在水平面(10.4 S,SE 1.0)时相比矢状(9.4,0.8 SE )和额叶(9.4 S,SE 0.9)的飞机。有角段或任何相互作用没有显着的主效应。被发现的响应时间(F(1,14)= 129.1,P <0.001)之间的主体作用显着。

图5。结果。整个模式一)签名错误倒塌的测试飞机。 B)响应时间的方式倒塌横跨运动飞机测试。误差棒是+ / - 1 SEM
讨论
通过5移动路径集成以及用来解决观察员发源的一种手段,但很容易的角度,低估已建立。我们的研究结果表明平移,但仅在水平面。在垂直平面的参与者更容易高估的角度动议通过,或有没有偏见。这些结果或许可以解释为什么估计海拔走过的地形往往被夸大了10,也就是为什么一个建筑的不同楼层之间的空间导航是可怜的11。这些结果也可能与球囊的相对比例在已知的不对称来utricule受体(〜0.58)12。响应时间较慢,前庭动觉信息相比,视觉信息是目前的基础上建议,有可能是额外的延迟,与试图确定一个人的起源,仅基于惯性线索可能会涉及到最近的研究表明,前庭感知缓慢相比13-16其他感官。总的来说,我们的结果表明,垂直移动时,其中可能涉及到人类经验的运动大多水平面内的事实,可用于替代战略,确定一个人的起源。此外,很少经历而连续翻译,他们最常发生在矢状面 - 误差是最小的 - 例如,当我们走向自动扶梯和移动。虽然实验后的采访,没有反映出不同的策略之间的飞机,实验应该探索这种可能性。使用额外程度的自由,较长的路径,用身体不同取向的相对重力,以及使用角度较大的领域,现在可能与MPI CyberMotion模拟器轨迹的实验计划,以进一步探讨在三个层面的整合路径的性能。
披露声明
没有利益冲突的声明。
致谢
MPI博士后的奖学金MB-C和商标;韩国救国阵线(R31-2008-000-10008-0),红磡湾。卡尔Beykirch,迈克尔Kerger约阿希姆唐普德技术援助和科学讨论。
材料
戴尔24“1920x1200的液晶显示屏(有效场的观点掩盖到1200×1200)
UDP通讯定制的操纵杆
参考文献
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。