
Method Article
MPI CyberMotion Simulator: Implementierung eines neuartigen Motion Simulator zu Multisensorische Pfadintegration in drei Dimensionen erforschen
In diesem Artikel
Zusammenfassung
Eine effiziente Möglichkeit, Einblick, wie Menschen navigieren sich in drei Dimensionen gewinnen wird beschrieben. Das Verfahren nutzt eine Bewegungssimulator Lage ist, sich Beobachter in einer Weise, unerreichbar von traditionellen Simulatoren. Die Ergebnisse bestätigen, dass Bewegung in der horizontalen Ebene unterschätzt wird, während die vertikale Bewegung wird überschätzt.
Zusammenfassung
Pfad Integration ist ein Prozess, in dem Selbst-Bewegung über die Zeit integriert wird, um eine Schätzung eines aktuellen Position relativ zu einem Startpunkt 1 zu erhalten. Der Mensch kann tun Pfadintegration ausschließlich auf visuelle 2-3, auditive 4 oder 5 auf der Grundlage Inertial-Cues. Allerdings mit mehreren Cues vorhanden, inertialer Information - besonders kinästhetischen - scheinen zu dominieren 6-7. In Ermangelung einer Vision, neigen Menschen zu kurze Entfernungen (<5 m) und Drehwinkel (<30 °) zu überschätzen, aber unterschätzen längeren 5. Bewegung durch physische Raum erscheint daher nicht genau im Gehirn repräsentiert werden.
Umfangreiche Arbeit ist auf die Bewertung Pfadintegration in der horizontalen Ebene getan worden, aber wenig über vertikale Bewegung (siehe 3 für virtuelle Bewegung von der Vision allein) bekannt. Ein Grund dafür ist, dass die traditionellen Bewegungs-Simulatoren haben einen kleinen Bewegungsspielraum Einschränkungenten hauptsächlich auf der horizontalen Ebene. Hier profitieren Sie von einem Bewegungssimulator 9.8 mit einer großen Palette von Bewegung zu beurteilen, ob Pfadintegration ähnlich zwischen horizontalen und vertikalen Ebenen ist. Die relativen Beiträge der trägen und visuelle Hinweise für Pfad-Navigation wurden ebenfalls erfasst.
16 Beobachter richtete sich in einem Sitz angebracht ist, um den Flansch eines modifizierten KUKA anthropomorphen Roboterarm. Sensorische Informationen wurden durch die Bereitstellung visueller (optischen Flusses, begrenzte Lebensdauer Sterne-Feld), vestibulär-kinästhetischen (passive Bewegung selbst mit geschlossenen Augen) oder visuelle und vestibulär-kinästhetischen Bewegungsreize manipuliert. Bewegungsbahnen in der horizontalen, Sagittal-und Frontalebene bestand aus zwei Segmentlängen (1.: 0,4 m, 2.: 1 m; ± 0,24 m / s 2 Peak-Beschleunigung). Der Winkel der beiden Segmente war entweder 45 ° oder 90 °. Beobachter wiesen zu ihrem Ursprung zurück, indem Sie einen Pfeil, der auf einem Avatar auf dem SCRE präsentiert überlagert wurdeen.
Beobachter waren eher Winkelgröße für eine Bewegung zu unterschätzen in der horizontalen Ebene im Vergleich zu den vertikalen Ebenen. In der Frontalebene Beobachter waren eher Winkel Größe überschätzen, während es keine solche Voreingenommenheit in der Sagittalebene. Schließlich reagierte Beobachter langsamer bei der Beantwortung basierend auf vestibulär-kinästhetischen Informationen allein. Menschliche Pfadintegration auf vestibulär-kinästhetischen Informationen basieren allein dadurch länger dauert als wenn visuelle Information vorhanden ist. Das zeigt im Einklang mit Unterschätzung und Überschätzung der Winkel ist durch ein in den horizontalen und vertikalen Ebene bewegt bzw. ist, legt nahe, dass die neuronale Repräsentation des Selbst-Bewegung durch den Raum nicht symmetrisch ist, die möglicherweise auf die Tatsache, dass Menschen Erfahrungen Bewegung meist innerhalb der Beziehung horizontalen Ebene.
Protokoll
1. KUKA Roboter GmbH
- Das MPI CyberMotion Simulator besteht aus einem Sechs-Joint serielle Roboter in einer 3-2-1 Konfiguration (Abbildung 1). Es basiert auf dem kommerziellen KUKA Robocoaster (ein modifiziertes KR-500 Industrieroboter mit einer 500 kg Nutzlast) basiert. Die physikalischen Veränderungen und die Software-Steuerung Struktur benötigt wird, um eine flexible und sichere Versuchsaufbau haben, wurden bisher beschrieben, einschließlich der Bewegungssimulator die Geschwindigkeit und Beschleunigung Einschränkungen, und die Verzögerungen und Übertragungsfunktion des Systems 9. Änderungen von dieser vorherigen Setup sind nachstehend definiert.

Abbildung 1. Grafische Darstellung der aktuellen MPI CyberMotion Simulator Arbeitsbereich.
- Komplexe Bewegungsprofile, die seitlichen Bewegungen verbinden sich mit Drehungen sind möglich mit dem MPI CyberMotion Simulator. Achsen 1, 4 und 6 ca. n kontinuierlich zu drehen. 4 Paar Hardware Endanschläge Grenze Axis 2, 3 und 5 in beiden Richtungen. Die maximale Reichweite von linearen Bewegungen ist stark abhängig von der Position, aus der die Bewegung beginnt. Die aktuelle Hardware Endanschläge des MPI CyberMotion Simulator sind in Tabelle 1 dargestellt.
Achse Messbereich [deg] Max. Geschwindigkeit [° / s] Achse 1 Kontinuierlich 69 Schwerpunkt 2 -128 Bis -48 57 Schwerpunkt 3 -45 Bis 92 69 Axis 4 Kontinuierlich 76 Achse 5 -58 Bis +58 76 Achse 6 Kontinuierlich 120
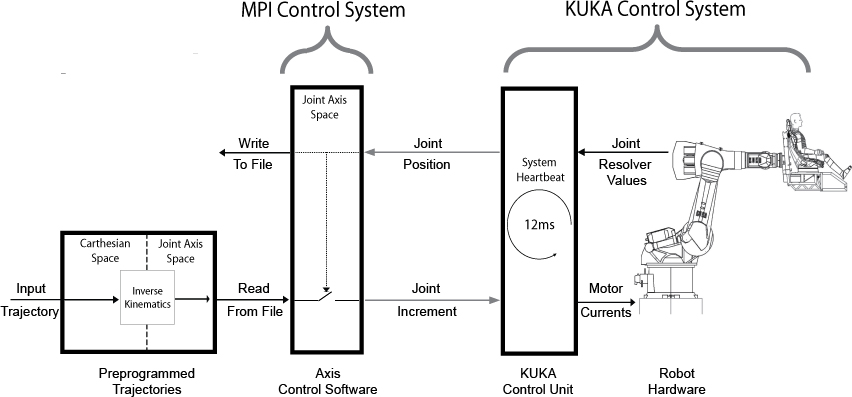
- Vor jedem Experiment am MPI CyberMotion Simulator durchgeführt wird, wird jede experimentelle Bewegungsbahn eine Testphase auf einer Simulation KUKA PC (Office-PC). Das "Office PC" ist ein spezielles Produkt von KUKA, die den realen Roboterarm simuliert und beinhaltet die gleiche Betriebssystem und die Kontrolle Bildschirm-Layout wie die reale Roboter verkauft. Ein schematischer Überblick über die Steuerung des MPI CyberMotion Simulator für Open-Loop-Konfiguration ist in 2 gezeigt.

Abbildung 2. Schematischer Überblick über die Open-Loop-Steuerung des MPI CyberMotion Simulator. Klicken Sie hier für eine größere Abbildung .
{kind=link}
- Die Details der Steuerung struktur finden Sie hier 9 gefunden werden. In Kürze, eine Open-Loop-Konfiguration wie die in der aktuellen Experiment verwendet werden, sind Trajektorien vorprogrammierten durch Umsetzen von Eingangsdaten Trajektorien in kartesischen Koordinaten in Gelenkraum Winkel durch inverse Kinematik (2).
- Die MPI-Steuerung liest in diesen gewünschten Gelenkwinkel Schritten und sendet diese an der KUKA Steuerung zu Achsbewegungen über Motorströme durchzuführen. Gemeinsame Resolver-Werte werden in der KUKA Steuerung, die die aktuellen Gelenkwinkel Positionen bestimmt, an einem internen Zinsfuß von 12 ms, was wiederum lösen die nächsten gemeinsamen Zuwachs an von Datei, die vom MPI-Steuerung gelesen werden gesendet als auch schreiben, die aktuelle gemeinsame Winkelpositionen auf die Festplatte. Die Kommunikation zwischen dem MPI und KUKA Steuerung ist durch eine Ethernet-Verbindung mit dem KUKA-RSI-Protokoll.
- Ein Rennwagen Sitz (RECARO Pole Position) mit einem 5-Punkt-Sicherheitsgurt-System (Schroth) ausgestattet ist, an einem Chassis befestigt which eine Fußstütze. Das Chassis ist mit dem Flansch des Roboterarms (3a) angebracht ist. Experimente sind auch von Sitzplätzen Teilnehmer innerhalb einer geschlossenen Kabine (Abbildung 3b) möglich.

Abbildung 3. MPI CyberMotion Simulator-Setup. a) Konfiguration für aktuelle Experiment mit LCD-Display. b) Konfiguration für Experimente erfordern eine geschlossene Kabine mit Front-Projektion Stereo-Anzeige. c) Aufprojektion Mono-Display. d) Head-Mounted-Display.
- Da das Experiment in der Dunkelheit durchgeführt wird, erlauben Infrarot-Kameras Video-Überwachung der von der Leitwarte aus.
2. Visualisierung
- Mehrere Visualisierung Konfigurationen sind möglich mit dem MPI CyberMotion Simulator wie LCD, Stereo oder Mono Frontprojektion und Head Mounted Displays (Abbildung 3). Für das laufendeExperiment visuelle Hinweise zur Selbst-Bewegung werden von einem LCD-Display (Abbildung 3a) platziert 50 cm vor der Beobachter, die sonst in der Dunkelheit getestet wurden zur Verfügung gestellt.
- Die visuelle Darstellung wurde unter Verwendung Virtools 4.1-Software und bestand aus einer zufälligen, begrenzte Lebensdauer Punkt-Feld. Quaderförmiger sich acht virtuelle Einheiten nach vorne, rechts, links, oben und unten aus der Sicht des Teilnehmers (dh 16 x 16 x 8 Einheiten) wurde mit 200.000 gleich Teilchen, bestehend aus weißen Kreisen 0,02 Einheiten gefüllt im Durchmesser vor einem schwarzen Hintergrund. Die Punkte wurden nach dem Zufallsprinzip durch den Raum (homogene Wahrscheinlichkeitsverteilung innerhalb des Raumes) verteilt. Die Bewegung in virtuellen Einheiten skaliert wurde zu 1 zu 1 entsprechen mit körperlicher Bewegung (1 virtuelle Einheit = 1 physikalische Meter).
- Jedes Teilchen wurde für zwei Sekunden vor dem Verschwinden gezeigt und sofort zeigt sich wieder an einem beliebigen Ort innerhalb des Raumes. So die Hälfte der Punkte verändert ihrePosition innerhalb einer Sekunde. Punkte zwischen einem Abstand von 0,085 und 4 Einheiten wurden den Teilnehmern (: 13 ° und 0,3 ° entsprechenden Blickwinkel) angezeigt.
- Bewegung innerhalb der dot-Feld wurde mit körperlicher Bewegung durch den Empfang Bewegungsprofile von der MPI-Kontrolle durch Computer eine Ethernet-Verbindung über das UDP-Protokoll übertragen synchronisiert. Wenn sich durch den Punkt-Feld die durchschnittliche Anzahl der Punkte waren für alle Bewegungen konstant. Diese Anzeige sofern keine absolute Größe Maßstab, aber optischen Fluss und Bewegung Parallaxe als Punkte waren Sphären mit einer festen Größe; suchen kleineren nach ihrem Abstand relativ zum Beobachter.
3. Experimentelles Design
- 16 Teilnehmer, die naiv zu dem Experiment mit der Ausnahme von einem Autor (MB-C) waren, trug Noise-Cancelling-Kopfhörer mit einem Mikrofon, um Zwei-Wege-Kommunikation mit dem Experimentator erlauben. Zusätzliche akustische Rauschen wurde kontinuierlich durch den Kopfhörern gespielt nes weiteren Maske Lärm durch den Roboter produziert.
- Die Teilnehmer verwendet einen speziell angefertigten Joystick mit Tasten Antwort mit Daten über ein Ethernet-Verbindung über das UDP-Protokoll übertragen ausgestattet.
- Der Winkel der beiden Segmente Bewegung war entweder 45 ° oder 90 °. Bewegungen in horizontaler, Sagittal-und Frontalebene bestand aus: die Zukunft nach rechts (FR) oder rechts-vorwärts (RF), nach unten-vorne (DF) oder vorwärts-abwärts (FD), und nach unten-rechts (DR) oder rechts- nach unten (RD) Bewegungen (Abbildung 4a).

Abbildung 4. Geschäftsordnung. a) Schematische Darstellung der Bahnen in dem Experiment verwendet. b) sensorische Informationen für jede Flugbahn typgeprüft zur Verfügung gestellt. c) Zeigen Aufgabe verwendet werden, um die Herkunft von denen die Teilnehmer dachten, sie hätten aus bewegt zeigen.rge.jpg "target =" _blank "> Klicken Sie hier für eine größere Abbildung.
- Sensorische Informationen wurden durch die Bereitstellung manipuliert visuellen (optischen Flusses, begrenzte Lebensdauer Sterne-Bereich), vestibulär-kinästhetischen (passive Bewegung selbst mit geschlossenen Augen) oder visuelle und vestibulär-kinästhetischen Bewegungsreize (Abb. 4b).
- Bewegungstrajektorien bestand aus zwei Segmentlängen (1.: 0,4 m, 2.: 1 m; ± 0,24 m / s 2 Spitzenbeschleunigung; Abbildung 4b). Trajectories bestand aus nur Übersetzung. Keine Drehungen der Teilnehmer vor. Um mögliche Störungen durch Bewegung vor jedem Versuch zu reduzieren und sicherzustellen, dass das vestibuläre System getestet wurde, ausgehend von einem stabilen Zustand, ging eine 15 s Pause jede Flugbahn.
- Beobachter wiesen zu ihrem Ursprung zurück, indem Sie einen Pfeil, der auf einen Avatar auf dem Bildschirm (Abbildung 4c) präsentiert überlagert wurde. Die Bewegung des Pfeils wurde, um die Flugbahn der Ebene eingeschränkt und kontrolliert von ter Joystick. Der Avatar wurde von Frontal-, Sagittal und horizontale Blickwinkel präsentiert. Beobachter durften einzelne oder alle Standpunkte zu verwenden, um zu antworten. Das Ausgangsmaterial Orientierung des Pfeils wurde randomisiert in den Studien.
- Wie das Aufzeigen Aufgabe erforderte die Teilnehmer geistig verwandeln ihre Perspektive zeigt aus einer egozentrischen zu einem exozentrisch Darstellung wurden die Teilnehmer Anleitungen zum Punkt zurück zu ihrem Ursprung mit Verweis auf den Avatar vor der Praxis und experimentelle Studien gegeben. Die Teilnehmer erfuhren, dass zeigen werden sollten, als ob der Avatar waren ihren eigenen Körper werden. Die Teilnehmer wurden dann angewiesen, um physische Ziele in Bezug auf das Selbst mit dem exozentrisch Messverfahren hinweisen. Zum Beispiel wurden die Teilnehmer instruiert, auf dem Joystick ruhen sich auf ihren Schoß auf halbem Weg zwischen sich und der Bildschirm, die Teilnehmer auf den Pfeil nach vorne und unten relativ zu den avatar gewünschten Punkt. Alle Teilnehmer waren in der Lage, diese auszuführenAufgaben ohne Ausdruck Verwirrung.
- Jede Versuchsbedingung wurde 3-mal wiederholt und in zufälliger Reihenfolge präsentiert. Unterschrieben Fehler und Reaktionszeit wurden als abhängige Variablen in zwei getrennten 3 (Flugzeug) * 2 (Winkel) * 3 (Modalität) ANOVA mit wiederholten Messungen analysiert. Reaktionszeiten von einem Extrem Ausreißer Teilnehmer wurden von der Analyse entfernt.
4. Repräsentative Ergebnisse
Unterschrieben Fehler Ergebnisse werden über die Modalitäten und Winkel zusammengebrochen, da keine signifikanten Haupteffekte für diesen Faktoren gefunden wurden. 5a zeigt die signifikanten Haupteffekt der Bewegungsebene (F (2,30) = 7.0, p = 0,003), wo Beobachtern unterschätzt Winkel Größe ( Durchschnittswerte weniger als 0 °) für eine Bewegung in der horizontalen Ebene (-8,9 °, sich 1.8). In der Frontalebene Beobachter waren eher durchschnittlich, um Winkel Größe (5,3 °, SE 2,6) zu überschätzen, während es keine solche Voreingenommenheit in der Sagittalebene (-0,7 °, SE 3,7). While Haupteffekte des Winkels und der Modalität waren nicht signifikant, wurde Winkel signifikant mit dem Flugzeug zu interagieren (F (2,30) = 11,1, p <0,001), so daß Überschätzung in der Frontalebene größer waren für Bewegungen um 45 ° (7,9 ° , SE 2.6) als um 90 ° (2,8 °, sich 2.7), während eine solche Diskrepanz abwesend den anderen Ebenen ist. Darüber hinaus wurde Modalität signifikant mit Winkel zu interagieren (F (2,30) = 4,7, p = 0,017), so daß Unterschätzung von vestibulären Information allein für Bewegungen um 90 ° deutlich größer waren (-4,3 °, SE 2.1) gegenüber die visuelle (-2,0 °, SE 2,4) und vestibuläre und visuelle Informationen kombiniert (2,3 °, SE 2.2) Bedingungen, während die solche Abweichungen fehlten für Bewegungen bis 45 °. Kein signifikanter Effekt war zwischen den Fächern für signierte Fehler (F (1,15) = 0,7, p = 0,432). 5b zeigt die Reaktionszeit Ergebnisse. Es gab einen signifikanten Haupteffekt derModalität (F (2,28) = 22,6, p <0,001), wo Beobachter reagierten langsamsten bei der Beantwortung basierend auf vestibulär-kinästhetischen Informationen allein (11,0 S, Se 1,0) im Vergleich zur visuellen (9,3 S, Se 0,8) und kombinierte (9,0 S, Se 0,8) Bedingungen. Es wurde auch eine signifikante Haupteffekt der Ebene (F (2,28) = 7,5, p = 0,002), wo Beobachter reagiert am langsamsten, wenn in der horizontalen Ebene (10,4 S, Se 1.0) bewegt im Vergleich zu der Sagittalebene (9,4 s, SE 0.8 ) und den frontalen (9,4 S, Se 0,9) Ebenen. Es gab keinen signifikanten Haupteffekt der Segment Winkel oder es Wechselwirkungen. Ein signifikanter Effekt wurde zwischen Subjekten bezüglich der Reaktionszeiten (F (1,14) = 129,1, p <0,001) gefunden.

Abbildung 5. Ergebnisse. a) Signed Fehler zusammengebrochen über Modalität für die Flugzeuge getestet. b) Ansprechzeit zusammengebrochen über Bewegungsebenen für die Modalitätengetestet. Fehlerbalken sind + / - 1 SEM
Diskussion
Path-Integration wurde auch als ein Mittel benutzt, um zu lösen, wo ein Beobachter stammten, sondern neigt zu einer Unterschätzung des Winkels ein etabliert hat über 5 bewegt. Unsere Ergebnisse zeigen, das für eine Translationsbewegung, sondern nur in der horizontalen Ebene. In den vertikalen Ebenen Teilnehmer sind eher überschätzen die Winkel bewegt durch oder haben keinen Bias überhaupt. Diese Ergebnisse könnten erklären, warum die Schätzungen der Höhe über Gelände-verfahren zu übertrieben werden 10 neigen und auch, warum räumlichen Navigation zwischen den verschiedenen Stockwerken eines Gebäudes ist schlecht 11. Diese Ergebnisse können auch mit bekannten Asymmetrien in dem Anteil, der Sacculus an Rezeptoren (~ 0,58) 12 utricule stehen. Langsamere Reaktionszeit basierend auf vestibulär-kinästhetischen Informationen allein im Vergleich zu, wenn visuelle Informationen vorhanden suggeriert, dass es möglicherweise zusätzliche Verzögerungen mit dem Versuch, seine Herkunft auf inertialer Information basiert allein bestimmen verbunden sein, welchekann auf neuere Studien zeigen, dass die vestibuläre Wahrnehmung beziehen wird langsam zu den anderen Sinnen 13-16 verglichen. Insgesamt deuten die Ergebnisse an, dass alternative Strategien für die Bestimmung eigenen Ursprung verwendet werden, wenn vertikal bewegt was zu der Tatsache, dass Menschen Erfahrungen Bewegung meist innerhalb der horizontalen Ebene beziehen. Während weiterhin sequentielle Übersetzungen sind selten erlebt sie am häufigsten auftreten, in der Sagittalebene - wo Fehler sind minimal - wie wenn wir in Richtung zu gehen und auf einer Rolltreppe bewegen. Während Post-Experiment Interviews nicht unbedingt haben verschiedene Strategien unter den Flugzeugen, sollten Experimente erforschen diese Möglichkeit. Experimente mit Trajektorien mit zusätzlichen Freiheitsgrade, längere Wege, mit dem Körper unterschiedlich orientierten Verhältnis zur Schwerkraft, sowie mit größeren Sichtfelder, die heute mit dem MPI CyberMotion Simulator möglich sind geplant, um weiter zu untersuchen Pfadintegration Leistung in drei Dimensionen.
Offenlegungen
Keine Interessenskonflikte erklärt.
Danksagungen
MPI Postdoc Stipendien für MB-C und TM; koreanischen NRF (R31-2008-000-10008-0) zu HHB. Dank Karl Beykirch, Michael Kerger & Joachim Tesch, um technische Unterstützung und wissenschaftliche Diskussion.
Materialien
KUKA KR 500 Heavy Duty Industrial Robot
Dell 24 "1920x1200 LCD-Display (effektive Feldder Blick maskiert, um 1200 x 1200)
Maßarbeit Joystick mit UDP-Kommunikation
Referenzen
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten