
Method Article
MPI CyberMotion Simulator: Implementazione di un simulatore di movimento Novel per Indagare l'integrazione multisensoriale Percorso in tre dimensioni
In questo articolo
Riepilogo
Un modo efficace per ottenere informazioni sul modo in cui gli esseri umani stessi navigare in tre dimensioni è descritto. Il metodo si avvale di un simulatore di movimento in grado di muoversi osservatori in modi irraggiungibili dai simulatori tradizionali. I risultati confermano che il movimento nel piano orizzontale è sottostimato, mentre il movimento verticale è sovrastimato.
Abstract
Path integrazione è un processo in cui è integrato auto-movimento nel tempo per ottenere una stima della propria posizione corrente rispetto ad un punto di partenza 1. Gli esseri umani possono fare il percorso di integrazione basata esclusivamente sul 2-3 visiva, uditiva 4 o 5 segnali inerziali. Tuttavia, con spunti più attuali, spunti inerziali - in particolare cinestetica - sembrano dominare 6-7. In assenza di visione, gli esseri umani tendono a sovrastimare le distanze brevi (<5 m) e angoli di tornitura (<30 °), ma sottovalutano quelle più lunghe 5. Il movimento attraverso lo spazio fisico pertanto non sembra essere accuratamente rappresentato dal cervello.
Un'ampia attività è stata effettuata sulla valutazione percorso di integrazione nel piano orizzontale, ma poco è noto riguardo movimento verticale (vedi punto 3 per il movimento virtuale dalla visione da solo). Una ragione di ciò è che i simulatori di movimento tradizionali hanno una piccola gamma di movimento restrizioniTed principalmente al piano orizzontale. Qui ci avvaliamo di un simulatore motion 8-9 con una vasta gamma di movimenti per valutare se l'integrazione percorso è simile tra piani orizzontali e verticali. I contributi relativi dei segnali inerziali e visivi per il percorso di navigazione sono stati valutati.
16 osservatori a sedere in una sede montato sulla flangia di un braccio di robot antropomorfo KUKA modificato. Informazioni sensoriali è stato manipolato, fornendo spunti visivi in movimento (flusso ottico, campo stellare durata limitata), vestibolare-cinestetica (movimento autonomo passiva con gli occhi chiusi), o visivo e vestibolare-cinestetica. Traiettorie di movimento in orizzontale, piano sagittale e frontale composto da due lunghezze di segmento (1: 0,4 m, 2 °: 1 m; ± 0,24 m / s 2 accelerazione di picco). L'angolo delle due segmenti era o 45 ° o 90 °. Gli osservatori indicò la loro origine, spostando una freccia che è stato sovrapposto un avatar presentato sul scheren.
Osservatori erano più probabili a sottostimare dimensione angolo per il movimento nel piano orizzontale rispetto ai piani verticali. Negli osservatori piano frontale erano più propensi a sopravvalutare le dimensioni angolo, mentre non vi era alcuna distorsione tale nel piano sagittale. Infine, gli osservatori hanno risposto più lentamente quando si risponde sulla base di vestibolo-cinestetica le informazioni da solo. Percorso di integrazione umana basata sulla vestibolo-cinestetica sola informazione assume quindi più rispetto a quando le informazioni visive è presente. Questo è coerente con puntamento sottovalutare e sovrastima del solo angolo è mossa attraverso sui piani orizzontale e verticale, rispettivamente, suggerisce che la rappresentazione neurale di auto-movimento attraverso lo spazio non è simmetrica, che può riferirsi al fatto che l'esperienza umani movimento prevalentemente all'interno piano orizzontale.
Protocollo
1. KUKA Roboter GmbH
- Il simulatore CyberMotion MPI consiste di sei giunto robot seriale in una configurazione 3-2-1 (Figura 1). Si basa sul commerciale KUKA Robocoaster (uno modificato KR-500 robot industriale con un carico 500 kg). Le modifiche fisiche e la struttura di controllo software necessari per avere una configurazione flessibile e sicuro sperimentale sono stati precedentemente descritti, anche la velocità del simulatore di movimento e dei limiti di accelerazione, ed i ritardi e la funzione di trasferimento del sistema 9. Modifiche di questa configurazione precedente vengono di seguito definiti.

Figura 1. Rappresentazione grafica della corrente spazio di lavoro CyberMotion Simulator MPI.
- Profili di movimento complessi che combinano i movimenti laterali con rotazioni sono possibili con il Simulatore CyberMotion MPI. Assi 1, 4 e 6 ca n ruotare in modo continuo. 4 coppie di hardware dei finecorsa limite asse 2, 3 e 5 in entrambe le direzioni. La portata massima di movimenti lineari è fortemente dipendente dalla posizione dalla quale ha inizio la circolazione. L'hardware corrente fine-corsa del simulatore CyberMotion MPI sono mostrati nella Tabella 1.
Asse Gamma [deg] Max. velocità [deg / s] Asse 1 Continuo 69 Asse 2 Da -128 a -48 57 Asse 3 Da -45 a 92 69 Asse 4 Continuo 76 Asse 5 Da -58 a 58 76 Asse 6 Continuo 120
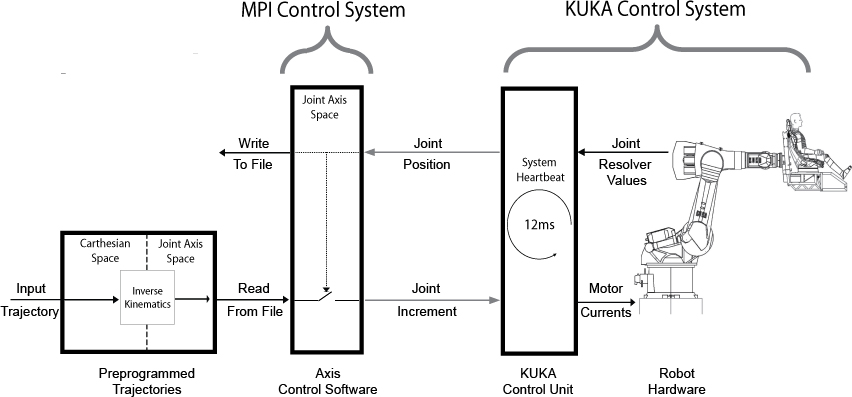
- Prima di qualsiasi esperimento eseguito sulla Simulator CyberMotion MPI, ogni traiettoria di movimento sperimentale, subisce una fase di test su un PC di simulazione KUKA (PC Office). Il "PC Office" è un prodotto venduto da KUKA che simula il braccio vero e proprio robot e include il sistema operativo e lo schermo identico layout di controllo come il robot reale. Una panoramica schematica del sistema di controllo del simulatore CyberMotion MPI per una configurazione ad anello aperto viene mostrato nella Figura 2.

Figura 2. Schema del sistema a ciclo aperto di controllo del simulatore CyberMotion MPI. Clicca qui per ingrandire la figura .
{kind=link}
- I dettagli della s controllo dellatruttura possono essere trovate qui 9. In breve, per una configurazione ad anello aperto come quello utilizzato nell'esperimento corrente, traiettorie sono pre-programmati convertendo traiettorie di ingresso in coordinate cartesiane di angoli spaziali comuni grazie alla cinematica inversa (Figura 2).
- Il sistema di controllo MPI legge in questi incrementi angolari desiderati comuni e invia questi al sistema di controllo KUKA per eseguire movimenti degli assi tramite correnti del motore. I valori comuni resolver vengono inviati al sistema di controllo KUKA che determina le posizioni attuali angolo comuni ad un tasso interno di 12ms, che a sua volta innescare il successivo incremento giunto da leggere dal file dal sistema di controllo MPI così come scrivere l'articolazione attuale posizioni angolari su disco. La comunicazione tra il MPI e KUKA sistemi di controllo è quello di una connessione Ethernet utilizzando il protocollo di KUKA-RSI.
- Un sedile da corsa (RECARO Pole Position), dotato di 5 punti Cintura di sicurezza del sistema (Schroth) è collegato a un telaio WHIch comprende un poggiapiedi. Il telaio è montato sulla flangia del braccio del robot (Figura 3a). Gli esperimenti sono anche possibili partecipanti sedili all'interno di una cabina chiusa (Figura 3b).

Figura 3. Installazione CyberMotion MPI Simulator. a) per l'esperimento di configurazione corrente con display LCD. b) Configurazione per esperimenti che richiedono una cabina chiusa con display frontale stereo proiezione. c) proiezione frontale del display mono. d) Capo display montato.
- Come viene eseguito l'esperimento al buio, le telecamere ad infrarossi permettono il controllo visivo dalla sala di controllo.
2. Visualizzazione
- Configurazioni di visualizzazione multiple sono possibili con il simulatore CyberMotion MPI tra LCD, stereo o mono proiezione frontale, e display montati la testa (Figura 3). Per la correnteesperimento segnali visivi per auto-moto sono forniti da un display LCD (figura 3a) posta a 50 cm di distanza degli osservatori che sono stati testati altrimenti al buio.
- La presentazione visiva è stata generata utilizzando il software Virtools 4,1 e consisteva di uno casuale, tempo di vita limitato dot-campo. Un cuboide estende otto unità virtuali al fronte, destra, sinistra, verso l'alto e verso il basso dal punto di vista del partecipante (cioè, 16 x 16 x 8 unità) è stata riempita con particelle di dimensioni uguali 200.000 costituiti da cerchi bianchi 0,02 unità di diametro fronte di uno sfondo nero. I punti sono stati casualmente distribuiti attraverso lo spazio (distribuzione di probabilità omogenea nello spazio). Il movimento in unità virtuali è scalata a corrispondere 1 a 1 con il movimento fisico (1 unità virtuale = 1 metro fisico).
- Ogni particella è stato mostrato per due secondi prima di sparire e subito mostrando di nuovo in una posizione casuale nello spazio. Così metà dei punti cambiatoposizione entro un secondo. Dots una distanza compresa fra 0,085 e 4 unità sono state esposte ai partecipanti (corrispondenti angoli di visuale: 13 ° e 0,3 °).
- Il movimento nel campo dot è stato sincronizzato con il movimento fisico ricevendo traiettorie di movimento dal computer di controllo MPI trasmesso da una connessione Ethernet utilizzando il protocollo UDP. Quando si sposta attraverso il dot-campo il numero medio di puntini rimasta costante per tutti i movimenti. Questo display non ha fornito alcuna scala assoluta grandezza, ma il flusso ottico e parallasse di movimento come punti erano sfere con una dimensione fissa, guardando più piccoli in base alla loro distanza rispetto all'osservatore.
3. Experimental Design
- 16 partecipanti, che erano naïve per l'esperimento con l'eccezione di un autore (MB-C), portavano a cancellazione di rumore cuffie dotate di un microfono per consentire una comunicazione bidirezionale con lo sperimentatore. Uditivi del rumore aggiuntivo è stato continuamente giocato attraverso il headpho nes al rumore maschera supplementare prodotta dal robot.
- I partecipanti usato un joystick personalizzato costruito dotato di pulsanti di risposta con i dati trasmessi da una connessione Ethernet utilizzando il protocollo UDP.
- L'angolo dei due segmenti di circolazione era o 45 ° o 90 °. I movimenti orizzontali, nei piani sagittale e frontale composto da: forward-destra (FR) o verso destra, in avanti (RF), verso il basso in avanti (DF) o in avanti, verso il basso (FD), e verso il basso-destra (CD) o verso destra, verso il basso (RD) i movimenti rispettivamente (Figura 4a).

Figura 4. Procedura. a) Rappresentazione schematica delle traiettorie utilizzate nell'esperimento. b) L'informazione sensoriale previsto per ogni tipo di traiettoria testato. c) Indicando compito usato per indicare l'origine di cui i partecipanti pensato che si erano trasferiti da.rge.jpg "target =" _blank "> Clicca qui per ingrandire la figura.
- Informazioni sensoriali è stato manipolato, fornendo visiva (flusso ottico, campo stellare durata limitata), vestibolare-cinestetica (movimento autonomo passiva con gli occhi chiusi), o segnali di movimento visivo e vestibolare-cinestetica (Figura 4b).
- Traiettorie del movimento era costituito da due lunghezze di segmento (1: 0,4 m, 2 °: 1 m; ± 0,24 m / s 2 accelerazione di picco, la figura 4b). Traiettorie consisteva di traduzione solo. Non rotazioni dei partecipanti verificato. Per ridurre la possibilità di interferenze di movimento prima di ogni processo e garantire che il sistema vestibolare è stato testato a partire da uno stato stazionario, a 15 s di pausa preceduto ogni traiettoria.
- Gli osservatori indicò la loro origine, spostando una freccia che è stato sovrapposto un avatar presentato sullo schermo (Fig. 4c). Il movimento della freccia è stato costretto a piano la traiettoria e controllato da tha joystick. L'avatar è stato presentato da punti di vista frontale, sagittale e orizzontale. Gli osservatori hanno permesso di usare o tutti i punti di vista per rispondere. L'orientamento iniziale della freccia è stato randomizzato nei trial.
- Come il compito richiesto ai partecipanti che punta a trasformare il loro punto di vista mentale che punta da una egocentrica ad una rappresentazione esocentrica, i partecipanti hanno ricevuto istruzioni su come puntare di nuovo alla loro origine con riferimento alla prima avatar pratica e prove sperimentali. I partecipanti hanno detto che punta dovrebbe essere come se l'avatar fosse proprio corpo. I partecipanti sono stati quindi istruiti per puntare agli obiettivi fisici relativi al sé con la tecnica esocentrica misura. Ad esempio, i partecipanti sono stati istruiti per puntare al joystick appoggiato sulle gambe a metà strada tra loro e lo schermo, che ha richiesto ai partecipanti di puntare la freccia avanti e in basso rispetto al avatar. Tutti i partecipanti erano in grado di eseguire questecompiti senza esprimere confusione.
- Ogni condizione sperimentale è stato ripetuto 3 volte e presentati in ordine casuale. Firmato errori e tempi di risposta sono stati analizzati come variabili dipendenti in due separati 3 (piano) * 2 (angolo) * 3 (modalità) ANOVA a misure ripetute. I tempi di risposta da un partecipante outlier estremo sono stati rimossi da analisi.
4. Risultati rappresentativi
Risultati di errore firmati sono crollati tra le modalità e gli angoli come principali effetti significativi sono stati trovati per questi fattori. Figura 5a mostra l'effetto principale significativo del piano di movimento (F (2,30) = 7.0, p = 0,003) in cui gli osservatori sottovalutato dimensioni angolo ( dati medi inferiori a 0 °) per il movimento nel piano orizzontale (-8,9 °, se 1,8). Negli osservatori piano frontale erano più propensi a sopravvalutare in media dimensione angolo (5,3 °, se 2.6), mentre non c'era una simile parzialità nel piano sagittale (-0,7 °, SE 3.7). While effetti principali di angolo e modalità non erano significative, angolo è risultata significativamente interagire con piano (F (2,30) = 11,1, p <0,001) in modo tale che sopravvaluta sul piano frontale erano più grandi per i movimenti di 45 ° (7,9 ° , se 2.6) che attraverso 90 ° (2,8 °, se 2.7), mentre una simile discrepanza era assente per gli altri piani. Inoltre, è stato trovato modalità di interagire significativamente con angolo (F (2,30) = 4.7, p = 0,017) in modo tale che sottostima di informazioni vestibolari solo per i movimenti di 90 ° erano significativamente più grandi (-4,3 °, se 2.1) rispetto al la visuale (-2,0 °, SE 2.4) e le informazioni vestibolari e visive combinato (2,3 °, se 2.2) condizioni, mentre tali discrepanze erano assenti per i movimenti fino a 45 °. Nessun effetto significativo tra i soggetti è stato firmato per l'errore (F (1,15) = 0.7, p = 0,432). Figura 5b mostra i risultati tempo di risposta. C'è stato un significativo effetto principale dimodalità (F (2,28) = 22.6, p <0,001) dove gli osservatori hanno risposto più lento quando si risponde sulla base di vestibolo-cinestetica sola informazione (11,0 s, se 1,0) rispetto a quello visivo (9,3 s, se 0,8) e combinato (9,0 S, SE 0,8) condizioni. C'è stato anche un significativo effetto principale del piano (F (2,28) = 7.5, p = 0,002) dove gli osservatori hanno risposto più lento quando viene spostato sul piano orizzontale (10,4 s, se 1.0) rispetto al sagittale (9,4 s, se 0,8 ) e frontali (9,4 s, se 0,9) aerei. Non c'era alcun effetto significativo principale di angolo di segmento o di eventuali interazioni. Un effetto significativo tra soggetti è stato trovato per tempo di risposta (F (1,14) = 129,1, p <0,001).

Figura 5. Risultati. a) errore Firmato crollato attraverso modalità per gli aerei testati. b) Tempo di risposta piani crollato in movimento per le modalitàtestato. Le barre di errore è + / - 1 sem
Discussione
L'integrazione del percorso è stato ben definito come un mezzo utilizzato per risolvere in cui un osservatore origine, ma è incline a sottostime di un angolo si è spostato a 5. I nostri risultati mostrano questo per il movimento traslatorio, ma solo nel piano orizzontale. Nei piani verticali partecipanti hanno più probabilità di sovrastimare l'angolo spostato attraverso o non hanno alcuna polarizzazione affatto. Questi risultati possono spiegare perché le stime di elevazione attraversato-over terreno tendono ad essere esagerate 10 e anche il motivo per la navigazione spaziale tra diversi piani di un edificio è scarsa 11. Questi risultati possono anche essere collegati a asimmetrie noti nella proporzione relativa al sacculo utricule recettori (~ 0,58) 12. Tempo di risposta più lento in base a vestibolo-cinestetica informazioni solo rispetto a quando l'informazione visiva è presente suggerisce che ci possono essere ulteriori ritardi legati al tentativo di determinare l'origine proprio in base a segnali inerziali, che da solapossono riguardare studi recenti mostrano che la percezione vestibolare è lento rispetto agli altri sensi 13-16. Nel complesso i nostri risultati suggeriscono che le strategie alternative per determinare l'origine proprio può essere utilizzato quando si muove verticalmente che possono riguardare il fatto che l'esperienza umani movimento principalmente all'interno del piano orizzontale. Inoltre, mentre le traduzioni sequenziali sono raramente sperimentato si verificano più spesso nel piano sagittale - in cui gli errori sono minimi - come quando ci dirigiamo verso e passare una scala mobile. Mentre post-esperimento interviste non riflettono differenti strategie tra i piani, gli esperimenti devono esplorare questa possibilità. Esperimenti con traiettorie con gradi di libertà, percorsi più lunghi, con il relativo corpo in modo diverso orientato alla gravità, oltre ad utilizzare campi più grandi di vista, che sono ora possibile con il simulatore CyberMotion MPI sono previste per approfondire l'integrazione delle prestazioni percorso in tre dimensioni.
Divulgazioni
Non ci sono conflitti di interesse dichiarati.
Riconoscimenti
MPI Postdoc di assegni per MB-C e TM; coreano NRF (R31-2008-000-10008-0) a HHB. Grazie a Karl Beykirch, Michael Kerger & Joachim Tesch per l'assistenza tecnica e la discussione scientifica.
Materiali
KUKA KR 500 Heavy Duty Industrial Robot
Dell 24 "1920x1200 lcd display (campo effettivodi vista mascherata per 1200 x 1200)
Personalizzato joystick costruito con comunicazione UDP
Riferimenti
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati