
Method Article
MPI CyberMotion Simulator: la mise en œuvre d'un simulateur de mouvement Novel pour étudier l'intégration multisensorielle chemin en trois dimensions
Dans cet article
Résumé
Un moyen efficace pour mieux comprendre comment les êtres humains eux-mêmes de naviguer en trois dimensions est décrite. La méthode tire parti d'un simulateur de mouvement capable de se déplacer de façon observateurs inaccessibles par des simulateurs traditionnels. Les résultats confirment que le mouvement dans le plan horizontal est sous-estimée, tandis que le mouvement vertical est surestimé.
Résumé
L'intégration Path est un processus dans lequel l'auto-mouvement est intégré au fil du temps pour obtenir une estimation de sa position actuelle par rapport à un point de départ 1. Les êtres humains peuvent faire de l'intégration basée sur un chemin exclusivement sur visuelle 2-3, auditive 4, ou des indices d'inertie 5. Cependant, avec des indices multiples indices présents, d'inertie - en particulier kinesthésique - semblent dominer 6-7. En l'absence de vision, les humains ont tendance à surestimer les courtes distances (<5 m) et les angles de rotation (<30 °), mais sous-estiment les plus longues 5. Mouvement dans l'espace physique ne semble donc pas être représenté avec précision par le cerveau.
Un travail important a été fait sur l'évaluation de l'intégration chemin dans le plan horizontal, mais on sait peu sur le mouvement vertical (voir 3 pour un mouvement virtuel à partir de la vision seule). Une raison à cela est que les simulateurs de mouvement traditionnels ont une petite gamme de mouvement restrictionsTed essentiellement sur le plan horizontal. Ici, nous profitons d'un simulateur de mouvement 8-9 avec une large gamme de mouvement afin d'évaluer si l'intégration chemin est similaire entre les plans horizontaux et verticaux. Les contributions relatives des repères inertiels et visuel pour la navigation chemin ont également été évalués.
16 observateurs assis dans un siège vertical monté sur la bride d'un bras robot anthropomorphique à jour KUKA. L'information sensorielle a été manipulé en fournissant des repères visuels de mouvement (flux optique, limitée champ d'étoiles de la vie), vestibulaire-kinesthésique (mouvements d'auto passive avec les yeux fermés), ou visuelle et vestibulaire-kinesthésique. Trajectoires du Mouvement à l'horizontale, plans sagittal et frontal se composait de deux longueurs de segments (1er: 0,4 m, 2ème étage: 1 m; ± 0,24 m / s 2 accélération maximale). L'angle des deux segments était soit de 45 ° ou 90 °. Observateurs ont souligné à leur origine en déplaçant une flèche qui se superpose à un avatar présenté sur le SCREfr.
Les observateurs étaient plus susceptibles de sous-estimer la taille d'angle pour le mouvement dans le plan horizontal par rapport aux plans verticaux. Dans les observateurs plan frontal étaient plus susceptibles de surestimer la taille angle alors qu'il n'y avait pas de biais par exemple dans le plan sagittal. Enfin, les observateurs ont répondu plus lent lorsque vous répondez sur la base des informations vestibulaires-kinesthésique seul. Intégration de chemin humaines basée sur vestibulaire-kinesthésique information à elle seule prend donc plus de temps que lorsque l'information visuelle est présente. Ce pointage est compatible avec sous-estimer et de surestimer l'un angle a traversé dans les plans horizontal et vertical, respectivement, suggère que la représentation neuronale de l'auto-mouvement dans l'espace est non-symétrique qui peut se rapporter au fait que l'expérience du mouvement humain la plupart du temps au sein de la plan horizontal.
Protocole
1. La société KUKA Roboter GmbH
- Le simulateur de CyberMotion MPI se compose d'un robot à six conjointe série dans une configuration 3-2-1 (figure 1). Il est basé sur le message publicitaire Robocoaster KUKA (KR une modification-500 robot industriel avec une charge utile de 500 kg). Les modifications physiques et la structure de contrôle du logiciel nécessaires pour disposer d'une configuration flexible et sûr expérimentales ont déjà été décrites, y compris la vitesse du simulateur de mouvement et les limites d'accélération, et les retards et la fonction de transfert du système 9. Modifications de cette configuration précédente sont définis ci-dessous.

Figure 1. Représentation graphique de l'espace de travail actuel CyberMotion MPI Simulator.
- Profils de mouvement complexes qui combinent des mouvements latéraux avec des rotations sont possibles avec le simulateur CyberMotion MPI. Axes 1, 4 et 6 ca n en rotation continue. 4 paires de matériel butées limite axe 2, 3 et 5 dans les deux directions. La portée maximale des mouvements linéaires est fortement dépendant de la position à partir de laquelle le mouvement commence. Le matériel actuel des butées du simulateur CyberMotion MPI sont présentés dans le tableau 1.
Axe Gamme [deg] Max. vitesse [deg / s] Axe 1 Continu 69 Axe 2 -128 À -48 57 Axe 3 -45 À 92 69 Axe 4 Continu 76 Axe 5 -58 À 58 76 Axe 6 Continu 120
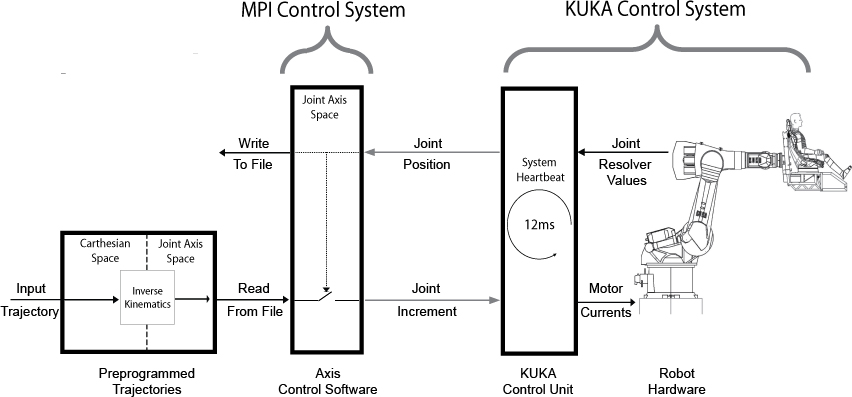
- Avant toute expérience est réalisée sur le simulateur de CyberMotion MPI, chaque trajectoire de mouvement expérimental subit une phase de test sur un PC de simulation KUKA (PC de bureau). Le "PC de bureau" est un produit spécial vendu par la société KUKA qui simule le bras du robot réel et inclut le système d'exploitation identiques et présentation de l'écran de contrôle que le robot réel. Une vue d'ensemble schématique du système de contrôle du simulateur CyberMotion MPI pour une configuration en boucle ouverte est montré dans la figure 2.

Figure 2. Vue d'ensemble schématique du système de contrôle en boucle ouverte du simulateur CyberMotion MPI. Cliquez ici pour agrandir la figure .
{kind=link}
- Les détails de la commande structure peut être trouvé ici 9. En bref, pour une configuration en boucle ouverte telle que celle utilisée dans l'expérience actuelle, les trajectoires sont pré-programmés par la conversion des trajectoires d'entrée en coordonnées cartésiennes à des angles spatiaux conjoints à travers la cinématique inverse (Figure 2).
- Système de commande MPI lit dans ces incréments angulaires souhaitées communes et envoie ces au système de commande pour effectuer des mouvements KUKA axe par les courants du moteur. Les valeurs du résolveur conjointes sont envoyés au système de contrôle KUKA qui détermine les positions actuelles angle de l'articulation à un taux interne de 12ms, ce qui à son tour déclencher la prochaine augmentation conjointe à être lu dans le dossier par le système de contrôle MPI ainsi que d'écrire l'articulation actuelle positions angulaires sur le disque. La communication entre le MPI et des systèmes de contrôle KUKA est par une connexion Ethernet en utilisant le protocole KUKA-RSI.
- Un siège voiture de course (RECARO pôle position) équipé d'un point de 5-système de ceinture de sécurité (Schroth) est fixé à un châssis whiCH comprend un repose-pied. Le châssis est monté sur la bride du bras de robot (figure 3a). Des expériences sont également possibles par les participants au sein des sièges d'une cabine fermée (Figure 3b).

Figure 3. Configuration MPI Simulator CyberMotion. a) Configuration de l'expérimentation en cours avec écran LCD. b) de configuration pour des expériences nécessitant une cabine fermée avec affichage de projection stéréo avant. c) d'affichage mono avant la projection. d) chef d'affichage monté.
- Comme l'expérience est effectuée dans l'obscurité, les caméras infrarouges permettent un contrôle visuel de la salle de contrôle.
2. Visualisation
- Configurations de visualisation multiples sont possibles avec le simulateur CyberMotion MPI y compris LCD, stéréo ou mono de projection frontale, et les affichages tête montés (Figure 3). Pour le courantindices expérience visuelle à l'auto-mouvement sont fournies par un écran LCD (figure 3a) placé à 50 cm en face des observateurs qui ont été testées par ailleurs dans l'obscurité.
- La présentation visuelle a été généré en utilisant Virtools 4.1 du logiciel et se composait d'un hasard, la durée de vie limitée point-champ. Un parallélépipède qui s'étend huit unités virtuelles à l'avant, à droite, à gauche, vers le haut et vers le bas à partir du point de vue du participant (c.-à-, 16 x 16 x 8 unités de la taille) a été rempli avec 200.000 particules de taille égale constitués de cercles blancs 0,02 unités de diamètre en face d'un fond noir. Les points ont été distribués au hasard dans l'espace (distribution de probabilité homogène au sein de l'espace). Mouvement dans les unités virtuelles a été mise à l'échelle pour correspondre 1 à 1 avec le mouvement physique (1 unité = 1 mètre virtuelle physique).
- Chaque particule a été montré pendant deux secondes avant de disparaître et vous indique immédiatement à nouveau à un endroit aléatoire dans l'espace. Ainsi, la moitié des points ont changé leurposition à l'intérieur d'une seconde. Dots entre une distance de 0,085 et 4 unités ont été affichés aux participants (correspondants des angles visuels: 13 ° et 0,3 °).
- Mouvement dans le domaine de dot a été synchronisé avec le mouvement physique en recevant des trajectoires de mouvement à partir de l'ordinateur de contrôle MPI transmis par une connexion Ethernet en utilisant le protocole UDP. Lors du déplacement à travers le point-champ, le nombre moyen de points est resté constant pour tous les mouvements. Cet affichage n'a fourni aucune échelle de taille absolue, mais le flux optique et de la parallaxe de mouvement sous forme de points étaient des sphères avec une taille fixe; cherchez plus petite en fonction de leur distance par rapport à l'observateur.
3. Conception expérimentale
- 16 participants, qui étaient naïfs à l'expérience, à l'exception d'un auteur (MB-C), portait un casque anti-bruit équipés d'un microphone pour permettre une communication bidirectionnelle avec l'expérimentateur. Le bruit auditif supplémentaire a été constamment joué par le headpho nda au bruit masque supplémentaire produite par le robot.
- Les participants ont utilisé un joystick sur mesure équipé de boutons de réponse avec les données transmises par une connexion Ethernet en utilisant le protocole UDP.
- L'angle des deux segments du mouvement était soit de 45 ° ou 90 °. Mouvements à l'horizontale, plans sagittal et frontal se composait de: l'avant-droite (FR) ou vers la droite vers l'avant (RF), la baisse de l'avant-(DF) ou vers l'avant-vers le bas (FD), et vers le bas vers la droite-(DR) ou vers la droite- à la baisse (RD) des mouvements respectivement (figure 4a).

Figure 4. Procédure. Représentation schématique a) des trajectoires utilisées dans l'expérience. b) L'information sensorielle pour chaque type de trajectoire testée. c) Soulignant tâche utilisé pour indiquer l'origine de l'endroit où les participants pensaient qu'ils avaient quitté.rge.jpg "target =" _blank "> Cliquez ici pour agrandir la figure.
- L'information sensorielle a été manipulé en fournissant visuelle (le flux optique, limitée champ d'étoiles de la vie), vestibulaire-kinesthésique (mouvements d'auto passive avec les yeux fermés), ou des indices de mouvement visuelles et vestibulaires-kinesthésique (figure 4b).
- Trajectoires du Mouvement se composait de deux longueurs de segments (1er: 0,4 m, 2ème étage: 1 m; accélération ± 0,24 m / s pic 2; la figure 4b). Trajectoires se composait de seulement la traduction. Pas de rotations des participants a eu lieu. Pour réduire les interférences possibles du mouvement avant chaque essai et s'assurer que le système vestibulaire a été testé à partir d'un état d'équilibre, une pause de 15 s précédé chaque trajectoire.
- Observateurs ont souligné à leur origine en déplaçant une flèche qui se superpose à un avatar présenté sur l'écran (Figure 4c). Mouvement de la flèche a été contraint au plan de la trajectoire et contrôlé par til joystick. L'avatar a été présenté à partir de points de vue frontale, sagittale et horizontale. Les observateurs ont été autorisés à utiliser tout ou partie des points de vue pour répondre. L'orientation de départ de la flèche a été randomisé entre les essais.
- Comme la tâche de pointage nécessaire aux participants de transformer mentalement leur point de vue de pointage à partir d'un égocentrique à une représentation exocentrique, les participants ont reçu des instructions sur la façon de signaler à leur origine par référence à l'avatar avant la pratique et des essais expérimentaux. Les participants ont été informés que de pointage doit être fait comme si l'avatar était leur propre corps. Les participants ont ensuite été chargé de pointer vers des cibles physiques relatifs à l'auto en utilisant la technique de mesure exocentrique. Par exemple, les participants ont été invités à pointer vers le joystick se reposer sur leurs genoux à mi-chemin entre eux et l'écran, ce qui exigeait que les participants à souligner la flèche vers l'avant et vers le bas par rapport à l'avatar. Tous les participants étaient en mesure d'effectuer cestâches sans exprimer la confusion.
- Chaque condition expérimentale a été répétée 3 fois et présentés dans un ordre aléatoire. Signé erreur et le temps de réponse ont été analysées comme variables dépendantes dans deux 3 séparée (plan) * 2 (angle) * 3 (modalité) à mesures répétées ANOVA. Les temps de réponse d'un participant des valeurs aberrantes extrêmes ont été retirés de l'analyse.
4. Les résultats représentatifs
L'erreur signés sont effondrés dans les modalités et les angles que pas d'effets significatifs principaux ont été trouvés pour ces facteurs. La figure 5a montre l'effet principal significatif du plan de déplacement (F (2,30) = 7,0, p = 0,003), où des observateurs sous-estimer la taille d'angle ( les données moyennes de moins de 0 °) pour le mouvement dans le plan horizontal (-8,9 °, en soi 1,8). Dans les observateurs plan frontal étaient plus susceptibles, en moyenne, à surestimer la taille angle (5,3 °, soi 2.6), alors qu'il n'y avait pas de biais par exemple dans le plan sagittal (-0,7 °, soi 3.7). Wheffets principaux ile d'angle et les modalités ne sont pas significatifs, l'angle a été trouvé de façon significative interagir avec plan (F (2,30) = 11,1, p <0,001) tels que des surestimations dans le plan frontal sont plus grands pour les mouvements à 45 ° (7,9 ° , soi 2.6) que par 90 ° (2,8 °, soi 2.7), tandis que un tel écart était absent pour les autres avions. En outre, la modalité a été trouvé de façon significative interagir avec angle (F (2,30) = 4,7, p = 0,017) de telle sorte que des sous-estimations de l'information vestibulaire seul pour les mouvements de 90 ° ont été significativement plus importante (-4,3 °, soi 2.1) par rapport à le visuel (-2,0 °, en soi 2,4) et de l'information visuelle et vestibulaire combinés (2,3 °, 2,2 soi) des conditions, tandis tels écarts sont absents pour les mouvements de 45 °. Aucune différence significative entre l'effet des sujets à l'erreur était signé (F (1,15) = 0,7, p = 0,432). La figure 5b montre les résultats de temps de réponse. Il y avait un effet significatif principal demodalité (F (2,28) = 22,6, p <0,001) plus lent où les observateurs ont répondu en répondant basée sur vestibulaire-kinesthésique information à elle seule (11,0 s, soi 1,0) par rapport au visuel (9,3 s, soi 0,8) et combinée (9,0 S, SE 0,8). conditions Il y avait également un effet principal significatif du plan (F (2,28) = 7,5, p = 0,002) où les observateurs le plus lent a répondu lors de son déplacement dans le plan horizontal (10,4 s, soi 1,0) par rapport à la sagittale (9,4 s, 0,8 soi ) et les frontales (9,4 s, soi 0,9) avions. Il n'y avait pas d'effet significatif principale de l'angle de segment ou des interactions. Une importante entre l'effet des sujets a été trouvé pour le temps de réponse (F (1,14) = 129.1, p <0,001).

Figure 5. Résultats. une erreur) Signé s'est effondré dans la modalité pour les avions testés. b) Le temps de réponse s'est effondré à travers des plans de déplacement pour les modalitéstesté. Les barres d'erreur est de + / - 1 sem
Discussion
Intégration de chemin a été bien établi en tant que moyen utilisé pour résoudre où un observateur originaire, mais est sujette à des sous-estimations de l'un angle a déménagé à 5. Nos résultats montrent que ce mouvement de translation pour, mais seulement dans le plan horizontal. Dans les plans verticaux participants sont plus enclins à surestimer l'angle déplacé à travers ou qui n'ont pas du tout parti pris. Ces résultats pourraient expliquer pourquoi les estimations de l'élévation traversé-dessus d'un terrain ont tendance à être exagérées 10 et aussi pourquoi la navigation spatiale entre les différents étages d'un bâtiment est pauvre 11. Ces résultats peuvent également être liées à des asymétries connus dans la proportion relative de saccule à utricule récepteurs (~ 0,58) 12. Temps de réponse plus lent sur la base de vestibulo-kinesthésique seule information par rapport à quand l'information visuelle est présente suggère qu'il peut y avoir des retards supplémentaires associés à essayer de déterminer l'origine son en fonction des indications d'inertie seule, ce quipeuvent se rapporter à des études récentes montrant que la perception vestibulaire est lente par rapport aux autres sens 13-16. Dans l'ensemble de nos résultats suggèrent que des stratégies alternatives pour déterminer l'origine son peut être utilisé lors du déplacement vertical qui peut se rapporter au fait que l'expérience du mouvement humain la plupart du temps dans le plan horizontal. En outre, tandis que les traductions séquentielles sont rarement connu qu'ils ne se produisent plus souvent dans le plan sagittal - où les erreurs sont minimes - comme lorsque nous marchons vers et déplacer sur un escalator. Alors que l'après-expérience entrevues n'ont pas le reflet de stratégies différentes entre les plans, les expériences devraient explorer cette possibilité. Des expériences avec des trajectoires en utilisant degrés de liberté supplémentaires, des chemins plus longs, avec le corps par rapport à la gravité orienté différemment, ainsi que l'utilisation de grands champs de vision qui sont désormais possible avec le simulateur CyberMotion MPI sont prévues pour étudier plus avant les performances intégration de chemin en trois dimensions.
Déclarations de divulgation
Pas de conflits d'intérêt déclarés.
Remerciements
MPI Postdoc allocations de détachement pour MB-C et MC; coréenne NRF (R31-2008-000-10008-0) à HHB. Merci à Karl Beykirch, Michael Kerger & Joachim Tesch d'assistance technique et la discussion scientifique.
matériels
KUKA KR 500 Heavy Duty robot industriel
Dell 24 "1920x1200 LCD (efficace sur le terrainde vue masquée à 1200 x 1200)
Personnalisé construit avec joystick communication UDP
Références
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.