
Method Article
MPI Simulator CyberMotion: יישום Simulator תנועה חדשנית לחקר האינטגרציה נתיב רב חושיים בשלושה ממדים
In This Article
Summary
הדרך היעילה להשגת תובנות לגבי האופן שבו בני אדם לנווט את עצמם בשלושה ממדים מתואר. השיטה מנצלת את סימולטור תנועה מסוגל לנוע משקיפים בדרכים בלתי ניתנות להשגה על ידי סימולטורים מסורתיים. תוצאות מאשרים כי התנועה במישור האופקי זוכים להערכה, ואילו תנועה אנכית זכה להערכה מופרזת.
Abstract
שילוב השביל הוא תהליך שבו עצמי בתנועה משולב לאורך זמן על מנת לקבל הערכה לגבי המיקום הנוכחי של האדם ביחס לנקודת המוצא 1. בני אדם יכולים לעשות אינטגרציה נתיב מבוסס אך ורק על 2-3 חזותי, שמיעתי 4, או רמזים אינרציה 5. עם זאת, עם רמזים רבים בהווה, רמזים אינרציה - kinaesthetic במיוחד - נראה לשלוט 6-7. בהיעדר חזון, בני אדם נוטים להפריז בהערכת מרחקים קצרים (פחות מ 5 מ ') וזוויות מפנה (<30 °), אבל אלה כבר לזלזל 5. תנועה במרחב הפיזי ולכן לא נראה להיות מיוצג באופן מדויק על ידי המוח.
עבודה נרחבת נעשה על הערכת אינטגרציה נתיב במישור האופקי, אבל מעט מאוד ידוע על תנועה אנכית (ראה 3 לתנועה וירטואלי מחזון בלבד). אחת הסיבות לכך היא כי סימולטורים תנועה מסורתיים יש מגוון קטן של תנועה restricטד בעיקר במישור האופקי. כאן אנו מנצלים את סימולטור תנועה 8-9 עם מגוון גדול של התנועה כדי להעריך האם שילוב נתיב דומה בין מטוסים אופקיים ואנכיים. התרומות היחסיות של אינרציה רמזים חזותיים עבור ניווט נתיב נבדקו גם.
16 צופים ישבה זקופה במושב רכוב על מקורבות של הזרוע שונה KUKA רובוט דמוי אדם. מידע חושי היה לטפל על ידי מתן רמזים חזותיים Motion (אופטי הזרימה, תחום מוגבל כוכב לכל החיים), שיווי המשקל, kinaesthetic (תנועה פסיבית עצמי בעיניים עצומות), או ויזואלית שיווי המשקל, kinaesthetic. מסלולי תנועה בין, מישורים אופקיים sagittal ו חזיתית מורכבת משני אורכי (קטע 1: 0.4 מ ', 2: 1 מ'; ± 0.24 m / s 2 האצת השיא). זווית בין שני פלחי היה או 45 מעלות או 90 מעלות. משקיפים הצביע חזרה מוצאם על ידי הזזת החץ היה על גבי הסמל האישי המוצג screen.
משקיפים נטו להמעיט בגודל זווית התנועה במישור האופקי לעומת המטוסים אנכיים. ב המשקיפים המטוס חזיתית נטו יותר להעריך גודל הזווית בזמן שאין הטיה כזו במישור sagittal. לבסוף, צופים הגיב לאט יותר כאשר לענות על סמך המידע שיווי המשקל, kinaesthetic לבד. שילוב נתיב האנושי מבוסס על מידע שיווי המשקל, kinaesthetic לבד ולכן לוקח זמן רב יותר כאשר המידע החזותי קיים. זה מצביע עולה בקנה אחד עם הערכת יתר להמעיט ו 1 זווית עברה דרך של מטוסים אופקי ואנכי בהתאמה, עולה כי ייצוג עצבי של תנועה עצמית בחלל היא לא סימטרית אשר עשוי להתייחס לעובדה כי בני האדם בתנועה ניסיון בעיקר בתוך אופקי למטוס.
Protocol
1. KUKA Roboter בע"מ
- סימולטור CyberMotion MPI מורכבת רובוט שש משותפת סדרתי בתצורת 3-2-1 (איור 1). היא מבוססת על מסחר KUKA Robocoaster (שונה KR-500 רובוט תעשייתי עם מטען 500 ק"ג). השינויים הפיזיים מבנה השליטה תוכנה המאפשרת לנו התקנה ניסיונית גמישה ובטוחה בעבר תיאר, כולל סימולטור של מהירות תנועה ומגבלות תאוצה, ועל העיכובים ותפקוד העברה של מערכת 9. שינויים של ההתקנה הקודמת זה מוגדרים להלן.

באיור 1. ייצוג גרפי של מרחב Simulator הנוכחית MPI CyberMotion עבודה.
- פרופילים תנועה מורכבים המשלבים תנועות צדדיים עם סיבובים אפשריים עם סימולטור CyberMotion MPI. צירים 1, 4 ו - 6 של CA n לסובב ברציפות. 4 זוגות של חומרה סוף מפסיק גבול ציר 2, 3 ו -5 בשני הכיוונים. הטווח המרבי של תנועות לינאריות תלויה מאוד על המיקום שממנו התנועה מתחילה. החומרה הנוכחית סוף מפסיק של סימולטור CyberMotion MPI מוצגים בטבלה 1.
ציר טווח [מעלות] מקס. מהירות [מעלות / s] ציר 1 רציף 69 ציר 2 -128 ל -48 57 ציר 3 -45 עד 92 69 ציר 4 רציף 76 ציר 5 -58 עד 58 76 ציר 6 רציף 120
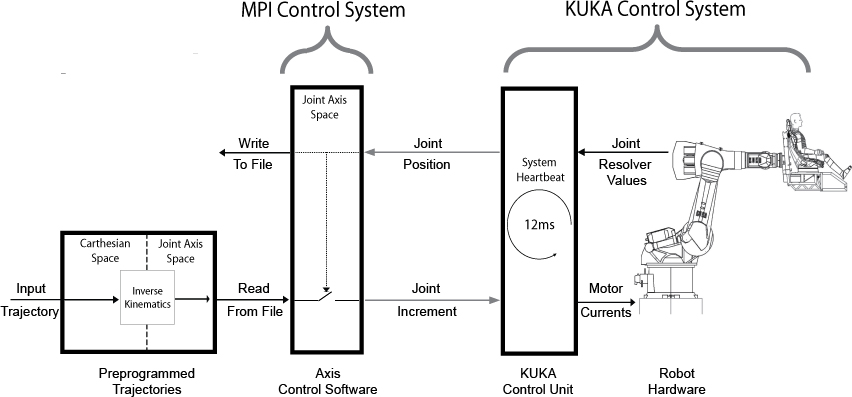
- לפני כל ניסוי מתבצע על סימולטור CyberMotion MPI, כל מסלול תנועה ניסיוני עובר שלב בדיקות במחשב סימולציה KUKA (PC Office). "מחשב משרדי" הוא מוצר מיוחד נמכר על ידי KUKA המדמה את זרוע הרובוט אמיתי וכולל את מערכת ההפעלה זהה המסך פריסת השליטה כמו רובוט אמיתי. סקירה סכמטית של מערכת השליטה Simulator CyberMotion MPI עבור תצורת פתוח הלולאה מוצגת באיור 2.

איור 2. סקירה סכמטית של מערכת פתוחה לולאה השליטה Simulator CyberMotion MPI. לחץ כאן דמות גדולה .
{kind=link}
- את פרטי הביקורת שלtructure ניתן למצוא כאן 9. בקיצור, עבור תצורה פתוחה לולאה כמו שהיה פעם בניסוי הנוכחי, מסלולים הם מתוכנתים מראש על ידי המרת מסלולים קלט בקואורדינטות קרטזיות את זוויות שטח משותפים באמצעות קינמטיקה ההופכי (איור 2).
- מערכת בקרת MPI קורא האלה במרווחים הרצויים זווית משותפת ושולחת אותם למערכת בקרת KUKA לבצע תנועות ציר דרך זרמים רכב. ערכים משותפים מזהה נשלחים מערכת הבקרה KUKA הקובע את העמדות הנוכחיות זווית משותפת בקצב הפנימי של 12ms, אשר בתורו לגרום תוספת משותפת הבא יש לקרוא מקובץ על ידי מערכת הבקרה MPI, כמו גם לכתוב משותף הנוכחי עמדות זווית בדיסק. תקשורת בין MPI ו KUKA מערכות בקרת היא על ידי חיבור Ethernet באמצעות KUKA-RSI פרוטוקול.
- במושב racecar (מיקום RECARO פולני) מצויד 5 נקודות חגורת בטיחות המערכת (Schroth) מצורף WHI מארזפרק כוללת הדום. המארז הוא רכוב על מקורבות של זרוע רובוט (איור 3 א). ניסויים גם אפשרי על ידי המשתתפים ישיבה בתוך התא הסגור (איור 3 ב).

איור 3. Simulator MPI ההתקנה CyberMotion. א) תצורה עבור הניסוי הנוכחי עם תצוגת LCD. ב) תצורת לניסויים הדורשים תא סגור עם מסך תחזית מול סטריאו. ג) היטל החזית מונו התצוגה. ד) ראש רכוב התצוגה.
- כמו הניסוי מתבצע בחשיכה, מצלמות אינפרא אדום לאפשר מעקב ויזואלי מחדר הבקרה.
2. ראיה
- תצורות להדמיה מרובות אפשרי עם סימולטור CyberMotion MPI כולל LCD, מערכת סטריאו או מונו הקרנת הקדמי, מציג ראש רכוב (איור 3). עבור הנוכחירמזים חזותיים הניסוי כדי תנועה עצמית מסופקים על ידי תצוגת LCD (איור 3 א) ממוקם 50 ס"מ מול הפקחים שהיו שנבדקו אחרת בחושך.
- מצגת ויזואלית נוצר באמצעות Virtools 4.1 תוכנה כלל אקראי, שדה נקודה מוגבלת בזמן החיים. קוביות הארכת שמונה יחידות וירטואליות קדימה, ימינה, שמאלה, כלפי מעלה וכלפי מטה מנקודת המבט של המשתתפים (כלומר, 16 x 16 x 8 יחידות בגודל) היה מלא 200,000 חלקיקים גודל זהות המורכב עיגולים לבנים 0.02 יחידות בקוטר מול רקע שחור. הנקודות חולקו באופן אקראי על פני שטח (התפלגות הומוגנית במרחב). התנועה ביחידות וירטואליות היה לשנותם כדי להתאים 1-1 בתנועה פיזית (1 יחידת וירטואלית = 1 מטר פיזית).
- כל חלקיק הוצגה למשך שתי שניות לפני ההיעלמות ומיד מופיע שוב במיקום אקראי במרחב. לפיכך מחצית הנקודות שלהם השתנההמיקום בתוך 2 1. בין נקודות במרחק של 0.085 ו - 4 יחידות הוצגו בפני המשתתפים (זוויות ראייה המתאימים: 13 מעלות ו -0.3 מעלות).
- התנועה בתוך השדה נקודה היה מסונכרן עם תנועה פיזית על ידי קבלת מסלולי תנועה ממחשב הבקרה MPI מועברת על ידי חיבור Ethernet באמצעות פרוטוקול UDP. בעת מעבר דרך שדה נקודה המספר הממוצע של נקודות נשאר קבוע כל התנועות. תצוגה זו סיפקה לא בקנה מידה גודל מוחלט, אבל זרימת הראייה פרלקסה תנועה כנקודות היו כדורים בעלי גודל קבוע, מסתכל על פי המרחק קטן יחסית לצופה שלהם.
3. עיצוב ניסיוני
- 16 משתתפים, שהיו תמימים להתנסות למעט מחבר אחד (MB-C), לבש מבטל רעשים אוזניות מצויד במיקרופון כדי לאפשר תקשורת דו כיוונית עם הנסיין. רעש שמיעתי נוסף נוגן ללא הרף דרך headpho נס לרעש מסכת נוספת מיוצר על ידי רובוט.
- המשתתפים השתמשו ג'ויסטיק בנוי מותאם אישית מצויד כפתורים תגובה עם הנתונים המועברים על ידי חיבור Ethernet באמצעות פרוטוקול UDP.
- הזווית של שני פלחי התנועה היה או 45 מעלות או 90 מעלות. תנועות מטוסים, אופקיים sagittal ו חזיתית כללה: קדימה, ימינה (FR) או ימינה, קדימה (RF), כלפי מטה קדימה (DF) או קדימה כלפי מטה (FD), וכלפי מטה, ימינה (DR) או ימינה, כלפי מטה (RD) תנועות בהתאמה (איור 4 א).

איור 4. נוהל. א) Schematic ייצוג של מסלולי השתמשו בניסוי. ב) מידע חושי סיפק לכל סוג המסלול נבדק. ג) הצבעה משימה משמש לציון מקור שבו המשתתפים חשבו שהם עברה.rge.jpg "target =" _blank "> לחץ כאן דמות גדולה.
- מידע חושי היה לטפל על ידי מתן חזותית (זרימת הראייה, שדה כוכבים מוגבלת לכל החיים), שיווי המשקל, kinaesthetic (תנועה פסיבית עצמי בעיניים עצומות), או רמזים חזותיים שיווי המשקל והתנועה, kinaesthetic (איור 4 ב).
- מסלולי התנועה מורכבת משני אורכי (קטע 1: 0.4 מ ', 2: 1 מ'; ± 0.24 m / s 2 האצת שיא; איור 4 ב). מסלולי כלל התרגום בלבד. אין סיבובים של המשתתפים עלה. כדי להפחית הפרעות תנועה אפשרית לפני כל ניסוי ולוודא כי מערכת שיווי המשקל נבדק החל ממצב יציב, הפסקה של 15 קדמה כל המסלול.
- משקיפים הצביע חזרה מוצאם על ידי הזזת החץ היה על גבי הסמל הציג על המסך (איור 4C). התנועה של החץ היה מוגבל למישור מסלול ונשלט על ידי tהוא ג'ויסטיק. הסמל הוצג מנקודות מבט הקדמיות, sagittal ואופקיים. משקיפים הורשו להשתמש נקודות מבט או לכל לענות. כיוון התחלתי של החץ היה אקראי על פני ניסויים.
- כל משימה מצביע נדרש המשתתפים נפשית להפוך את נקודת המבט שלהם מצביע אגוצנטרי לייצוג exocentric, המשתתפים קיבלו הוראות כיצד להצביע חזרה מוצאם ביחס אישי לפני תרגול וניסויים הניסוי. למשתתפים נאמר כי הצבעה צריכה להיעשות כאילו היו סמל הגוף שלהם. המשתתפים קיבלו הוראה ואז להצביע על מטרות פיזיות יחסית עצמית בשיטת המדידה exocentric. לדוגמה, המשתתפים קיבלו הוראה להצביע על הג'ויסטיק מונח על הברכיים שלהם בחצי הדרך בינם לבין המסך, אשר נדרשים המשתתפים להצביע על החץ קדימה ולמטה ביחס אישי. כל המשתתפים היו מסוגלים לבצע פעולות אלהמשימות מבלי להביע בלבול.
- כל תנאי הניסוי חזר על עצמו 3 פעמים והציג בסדר אקראי. שגיאה חתום זמן התגובה נותחו כמו משתנים תלויים ב 2 3 נפרדים (מטוס) * 2 (זווית) * 3 (שיטת) חזר אמצעים ANOVA. זמני תגובה של אחד המשתתפים מהוות מקרה קיצוני קיצוני הוסרו בניתוח.
4. נציג תוצאות
תוצאות שגיאה חתומות התמוטט על פני שיטות וזוויות כמו תופעות עיקריות משמעותיים נמצאו גורמים אלה. ציור 5a מראה את ההשפעה העיקרית משמעותית של תנועת המטוס (F (2,30) = 7.0, p = 0.003), שם צופים בהערכת גודל הזווית ( נתונים ממוצעים פחות ° 0) לתנועה במישור האופקי (-8.9 °, 1.8 SE). ב המשקיפים המטוס הקדמיות היו בסבירות גבוהה יותר בממוצע להפריז בהערכת גודל הזווית (5.3 °, SE 2.6), בעוד שאין הטיה כזו במישור sagittal (-0.7 °, 3.7 SE). ש"שההשפעות העיקריות של איל זווית לערוץ לא היו משמעותיים, זווית נמצאה משמעותית אינטראקציה עם המטוס (F (2,30) = 11.1, p <0.001) כך מגזים במישור הקדמי היה גדול יותר עבור תנועות דרך 45 מעלות (7.9 ° , se 2.6) מאשר דרך 90 מעלות (2.8 מעלות, SE 2.7), תוך התאמה כזו נעדר עבור מטוסים אחרים. בנוסף, שיטת נמצאה אינטראקציה משמעותית עם זווית (F (2,30) = 4.7, p = 0.017) כך ממעיט בהערכת המידע של שיווי המשקל לבד התנועות באמצעות 90 ° היה גדול יותר באופן משמעותי (-4.3 °, SE 2.1) לעומת חזותית (-2.0 °, SE 2.4) ומידע שיווי המשקל ויזואלית בשילוב (2.3 °, SE 2.2) התנאים, ואילו סתירות כאלה נעדרו לתנועות באמצעות 45 °. לא משמעותי בין השפעת הנושאים היה לטעות חתם (F (1,15) = 0.7, p = 0.432). איור 5 ב 'מראה את השעה תוצאות התגובה. היה ההשפעה העיקרית משמעותילערוץ (F (2,28) = 22.6, p <0.001), שם צופים הגיב האיטי ביותר כאשר לענות על סמך המידע שיווי המשקל, kinaesthetic בלבד (11.0 S, SE 1.0) לעומת חזותית (9.3 S, SE 0.8) ומשולבים (9.0 ים, SE 0.8) התנאים. היה גם אפקט עיקרי משמעותי של המטוס (F (2,28) = 7.5, p = 0.002), שם צופים הגיב האיטי ביותר כאשר עבר במישור האופקי (10.4 S, SE 1.0) לעומת sagittal (9.4 S, SE 0.8 ) ואת הקדמיות (9.4 S, SE 0.9) מטוסים. לא היתה השפעה משמעותית הראשי של זווית קטע או כל האינטראקציות. משמעותי בין השפעת נושאים נמצא על זמן התגובה (F (1,14) = 129.1, p <0.001).

איור 5. תוצאות. השגיאה) חתמה התמוטט על שיטת על המטוסים שנבדקו. ב) זמן תגובה התמוטט על פני מטוסים התנועה את שיטותנבדק. ברים שגיאה הם + / - 1 SEM
Discussion
שילוב נתיב הוקם גם האמצעים הננקטים לפתור שבו הצופה מקורו אבל נוטה ממעיט בהערכת של 1 זווית עברה עד 5. התוצאות שלנו מראות את זה לתנועה translational אבל רק בתוך המישור האופקי. ב המטוסים אנכיים המשתתפים נוטים להעריך יתר על המידה זווית עבר דרך או אין הטיה כלל. תוצאות אלה עשויות להסביר מדוע אומדני העלאת חצו יתר השטח נוטים להגזים 10 וגם למה ניווט מרחבית בין הקומות השונות של הבניין הוא עני 11. תוצאות אלה עשויות גם להיות קשור סימטריות הידועים בשיעור היחסי של שקיק כדי utricule קולטנים (~ 0.58) 12. זמן תגובה איטי יותר המבוסס על מידע שיווי המשקל, kinaesthetic בלבד לעומת כאשר מידע חזותי קיים עולה כי ייתכנו עיכובים נוספים הקשורים בניסיון לקבוע מקור של 1 על פי רמזים אינרציה בלבד, אשריכול להתייחס מחקרים אחרונים מראים כי תפיסת שיווי המשקל הוא איטי בהשוואה לחושים אחרים 13-16. בסך הכל התוצאות שלנו מראים כי אסטרטגיות חלופיות לקביעת מקור של 1 ניתן להשתמש בעת מעבר אנכי אשר עשוי להתייחס לעובדה כי בני האדם בתוך התנועה ניסיון בעיקר במישור האופקי. יתר על כן, בעוד תרגומים עוקבים מנוסים לעתים נדירות הם מתרחשים בדרך כלל במישור sagittal - שם שגיאות הן מינימליות - למשל כאשר אנו ללכת לכיוון המדרגות הנעות ולהמשיך הלאה. בעוד שלאחר הניסוי ראיונות לא משקפים אסטרטגיות שונות בין המטוסים, ניסויים צריך לחקור את האפשרות הזאת. ניסויים עם מסלולים באמצעות מעלות נוספות של חופש, שבילים ארוכים יותר, עם גוף יחסית חוקיים שונה הכבידה, כמו גם באמצעות שדות גדולים של נוף אשר ניתן כיום עם סימולטור CyberMotion MPI מתוכננים להמשיך לחקור שילוב ביצועים נתיב בשלושה ממדים.
Disclosures
אין ניגוד עניינים הצהיר.
Acknowledgements
MPI פוסט דוקטורט מלגות ל MB-C ו-TM, קוריאה NRF (R31-2008-000-10008-0) ל HHB. הודות קרל Beykirch, מיכאל Kerger & יואכים Tesch לקבלת סיוע טכני הדיון המדעי.
Materials
KUKA KR 500 Heavy Duty רובוט תעשייתי
Dell 24 "1920x1200 תצוגת LCD (שדה יעילמבט רעולי פנים אל 1200 x 1200)
ג'ויסטיק בנוי מותאם אישית עם UDP תקשורת
References
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved