
Method Article
MPI CyberMotionシミュレータ:三次元的に多感覚パスの統合を調査するための新しいモーションシミュレータの実装
要約
人間は三次元で自分自身を移動する方法への洞察を得るための効率的な方法が記載されている。方法は、従来のシミュレータによって実現不可能な方法でオブザーバーを移動させることができるモーションシミュレータを利用しています。結果は、垂直方向の動きが過大評価されている間、水平面での動きが、過小評価されていることを確認します。
要約
パスの統合は、出発点1に対して1の現在位置の推定値を得るために時間をかけて統合された自己運 動プロセスである。人間は視覚2-3、聴覚4、または慣性合図5に排他的に基づいてパスの統合を行うことができます。しかし、現在の複数のキューで、慣性手がかり-特にkinaestheticは- 6-7を支配するように見える。ビジョンの不在で、人間は5短距離(<5メートル)と回転角度(<30°)を過大評価するが、長いものを過小評価する傾向にある。物理的な空間での移動は、したがって、正確に脳で表されていないようです。
大規模な作業は、水平面内でパスの統合を評価する上で行われていますが、少し縦の動き(ビジョン単独でから仮想移動のために3を参照)について知られている。この理由の1つは、従来のモーションシミュレータは、モーションrestricの狭い範囲を持っていることです主に水平面にテッド。ここでは、パスの統合は、水平と垂直面の間に類似しているかどうかを評価する動きの大きい範囲でモーションシミュレータ8-9を活用しています。パスのナビゲーションのための慣性力と視覚的な手がかりの相対的な寄与も評価した。
16オブザーバーは変更されたKUKA関節ロボットアームのフランジに取り付けられた座席に直立座っていた。感覚情報は、視覚(光の流れ、限られた寿命のスターフィールド)、(目を閉じパッシブ自己運動)前庭 - kinaesthetic、または視覚と前庭-kinaesthetic運動の手がかりを提供することによって操作された。水平、矢状面と前頭面内の運動の軌跡は、2つのセグメントの長さ(;±0.24 m / s 2でピーク時の加速度1メートル:0.4メートル、2月1日)から成っていた。 2つのセグメントの角度は45°または90°のどちらかでした。オブザーバーは、screに提示アバターに重畳された矢印を移動することによって、その起源に戻って指摘したEN。
オブザーバは、垂直面に比べて水平面内で移動のための角度のサイズを過小評価する傾向があった。矢状面ではそのようなバイアスがなかった間、前頭面のオブザーバーの角度サイズを過大評価する傾向があった。単独で前庭-kinaesthetic情報に基づいて応答するときに最後に、オブザーバーが遅く答えた。前庭-kinaesthetic情報のみに基づいてヒトの経路の統合は、このように視覚情報が存在しているときよりも時間がかかります。ポインティングは、それぞれの角度一つ水平方向および垂直方向の面に貫通移動して過小評価と過大評価と一致している内にほとんど事実、人間の経験の動きに関連する可能性がある空間を介して自己運動の神経表現が非対称的であることを示唆している水平面。
プロトコル
1。 KUKAロボット社
- MPIのCyberMotionシミュレータは3-2-1の構成( 図1)の6つの関節シリアルロボットで構成されています。それは、商業KUKAロボコースター(500 kgのペイロードで変更されたKR-500産業用ロボット)に基づいています。柔軟かつ安全な実験のセットアップを持っているために必要な物理的な変更や、ソフトウェアの制御構造は、以前のモーションシミュレータの速度と加速度の制限、遅延やシステム9の伝達関数を含め、記載されている。この前の設定からの変更は以下のように定義されています。

図1現在のMPI CyberMotionシミュレータのワークスペースをグラフィカルに表現。
- 回転して横方向の動きを組み合わせた複雑なモーションプロファイルは、MPIのCyberMotionシミュレータで可能です。軸1、4、6、CA n個連続して回転させます。ハードウェアの4ペアが両方の方向に制限は2軸、3と5を終了停止します。直線運動の最大範囲は運動が始まり、そこからの位置に強く依存している。現在のハードウェアのMPI CyberMotionシミュレータのエンドを停止し、 表1に示されています。
軸 範囲[deg]の マックス。速度[deg / s]で 1軸 連続的な 69 2軸 -128〜-48 57 3軸 -45〜92 69 第4軸 連続的な 76 5軸 -58〜+58 76 6軸 連続的な 120
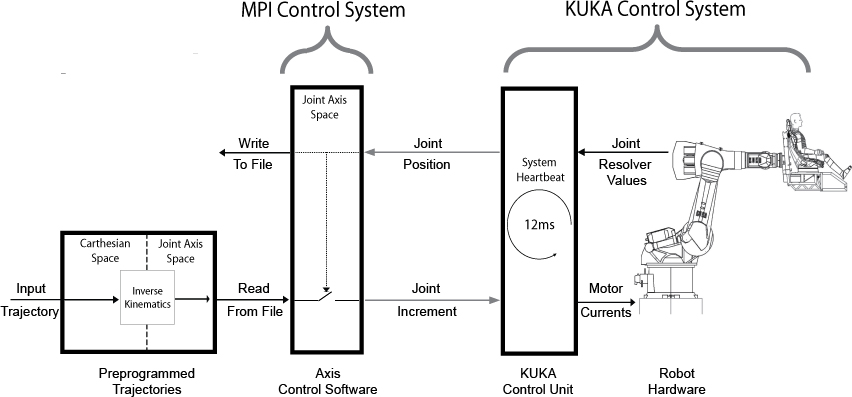
- すべての実験はMPIのCyberMotionシミュレータ上で実行される前に、各実験の運動軌跡は、KUKAのシミュレーションPC(事務所PC)上のテスト段階を経る。 "オフィスのPCは"本物のロボットアームをシミュレートし、実ロボットと同じオペレーティングシステムおよび制御画面レイアウトが含まれていますKUKAが販売する特別な製品です。オープン·ループ構成のためのMPI CyberMotionシミュレータの制御システムの概略を図2に示します。

図2 MPI CyberMotionシミュレータの開ループ制御システムの回路図の概要。 拡大図はここをクリック 。
{kind=link}
- コントロールsの詳細tructureここでは9見つけることができます。簡単に言えば、そのような現在の実験で使用されているような開ループ構成では、軌道はインバースキネマティクス( 図2)を介して関節裂隙角にデカルト座標での入力軌跡を変換することにより、あらかじめプログラムされています。
- MPIの制御システムは、これらの所望の関節角度の単位で読み込み、モータ電流を介して軸の動きを実行するためにKUKA制御システムにこれらを送信します。ジョイントリゾルバの値が順番にMPI制御システムによってファイルから読み込まれる次のジョイント増加を引き起こすだけでなく、現在のジョイントを作成する12msの内部収益率、少なくとも現在の関節角度の位置を決定するKUKAコントロールシステムに送信されます。ディスクへの角度の位置。 MPIとKUKA制御システム間の通信は、KUKA-RSIプロトコルを使用してイーサネット接続によるものである。
- 5点シートベルトシステム(シュロス)を搭載したレースカーシート(RECAROポールポジション)は、シャーシWHIに接続されているchはフットレストが含まれています。シャーシは、ロボットアーム( 図3a)のフランジに取り付けられている。実験は、密閉キャビン( 図3b)内の座席の参加者によっても可能です。

図3:MPIのCyberMotionシミュレータのセットアップ。 LCDディスプレイで現在の実験のために1)の構成。前面投影ステレオディスプレイで囲まれたキャビンを必要とする実験のためのb)の構成。 c)のフロントプロジェクションモノが表示されます。 d)のヘッドマウントディスプレイ。
- 実験は暗闇の中で行われているように、赤外線カメラは、制御室からの視覚監視を可能にします。
2。可視化
- 複数の可視化構成では、LCD、ステレオまたはモノラルのフロントプロジェクション、ヘッドマウントディスプレイ( 図3)を含むMPI CyberMotionシミュレータで可能です。電流の自己運 動の実験視覚的な手がかりは、特に暗所でテストされたオブザーバーの前面に50センチメートルを置か液晶ディスプレイ( 図3a)によって提供されます。
- 視覚的なプレゼンテーションは、Virtoolsの4.1ソフトウェアを使用して生成され、ランダム、限られた人生の時間のドットフィールドから成っていた。参加者の視点(すなわち、16×16のサイズ×8台)から正面、右、左、上方と下方に8つの仮想ユニットを拡張する直方体は、白丸の0.02台からなる20万同じサイズの粒子を充填した黒い背景の前に直径インチドットがランダムにスペース(空間内の均一な確率分布)に分散された。仮想ユニットの動きは、物理的な動き(1仮想ユニット= 1物理メートル)と1対1で対応するようにスケーリングされました。
- 各粒子が消失する前に、2秒間表示され、すぐに空間内のランダムな場所に再び表示されました。したがって、ドットの半分は、変更され、その1秒以内に位置。 0.085と4単位の距離の間にドットが参加者(13°と0.3°に対応する視覚的な角度)に表示されていました。
- ドットフィールド内の移動は、UDPプロトコルを使用してEthernet接続によって送信されたMPIの制御コンピュータからの動きの軌跡を受信することによって、物理的な動きと同期されていました。ドットフィールドを介して移動する際のドット数の平均はすべての動きに一定とどまった。このディスプレイには絶対的な大きさのスケールを提供しませんが、ドットのように光の流れと運動視差は、固定サイズの球体であった。観察者に相対的な距離に応じて、小さい方を探して。
3。実験計画
- 著者の一人(MB-C)を除いて、実験にナイーブであった16人の参加者は、実験者との双方向通信を可能にするためにマイクを搭載したノイズキャンセリングヘッドフォンを身に着けていた。追加の聴覚ノイズが連続してheadphoを通して演奏されたロボットによって生成され、さらにマスクノイズのファミコン。
- 参加者は、UDPプロトコルを使用してEthernet接続によって送信されるデータと応答ボタンを搭載したカスタム構築されたジョイスティックを使用していました。
- 2運動のセグメントの角度は45°または90°のどちらかでした。水平、矢状面と前頭面の動きは、から成っていた:前方右(FR)または右フォワード(RF)、下向きのフォワード(DF)または(FD)前方下向きにし、下向きの右(DR)または右 - それぞれ下方(RD)の動き( 図4a)。

図4の手順。実験に用いた軌跡の1)模式図。 b)の感覚情報がテストされた各軌跡タイプのために提供した。 c)の参加者がどこから移動したと思ったどこの起源を示すために使用するタスクを指す。rge.jpg "ターゲット=" _blank ">拡大図はここをクリックしてください。
- 感覚情報は、視覚(光の流れ、限られた寿命のスターフィールド)、(目を閉じパッシブ自己運 動)前庭- kinaesthetic、または視覚と前庭-kinaesthetic運動の手がかり( 図4b)を提供することによって操作された。
- 運動の軌跡は、2つのセグメントの長さ(;±0.24 m / s 2でピーク加速度、 図4bに 1メートル:0.4メートル、2月1日)から成っていた。軌跡は、翻訳から成っていた。参加者のない回転は発生しませんでした。前に、各裁判の動きから可能な干渉を低減し、前庭系が定常状態からテストされたことを確認するには、15秒休止は、それぞれの軌道を先行していた。
- オブザーバーは、画面( 図4c)に提示アバターに重畳された矢印を移動することによって、その起源に戻って指摘した。矢印の動きが軌道の平面に拘束し、tによって制御された彼はジョイスティック。アバターは、正面の矢と水平方向の視点から発表されました。オブザーバーは答えるようにいずれか、またはすべての視点を使用することができました。矢印の始点の向きは、試験全体のランダム化された。
- ポインティングタスクが参加者が精神的に外心の表現に自己中心的な視点から自分のポインティングを変換するために、必要に応じて、参加者は事前練習や実験的な試験にアバターを参照して、彼らの原点に戻って指すようにする方法について説明を与えられた。参加者はアバターが自分の身体であるかのようにポインティングが行われるべきであると言われました。参加者はその後、外心、測定技術を用いて自己との相対的なターゲットを指すように指示されました。たとえば、参加者は自分自身と参加者はアバターからの相対前方および下向きの矢印を指すようにするために必要な画面の間に彼らのラップハーフウェイで休んでジョイスティックを指すように指示されました。すべての参加者はこれらを実行することができました混乱を表現せずにタスクを実行します。
- 各実験条件を3回繰り返し、ランダムな順序で提示された。署名されたエラーメッセージと応答時間は、2つの独立した3(平面)* 2(角度)* 3(モダリティ)は測定ANOVAを繰り返すの従属変数として分析した。極端な外れ値の参加者からの応答時間は、分析から削除されました。
4。代表的な結果
有意な主効果はこれらの要因のために認められなかったとして署名したエラーの結果は、モダリティとの角度を越えて折りたたまれています。 図5aは、オブザーバーは角度サイズを過小評価して運動面の有意な主効果(F(2,30)= 7.0、P = 0.003)(示しています水平面内の運動のために0℃未満の平均データ)(-8.9°、SE 1.8)。矢状面ではそのようなバイアス(-0.7°、SE 3.7)が存在しなかった間、前頭面のオブザーバーでは、角のサイズを過大評価するまでの平均(5.3°、SE 2.6)でより高かった。 WH角度とモダリティのILE主効果は、角度が大幅に前頭面で過大評価は、45°(7.9°までの動きのために大きかったような平面(F(2,30)= 11.1、P <0.001)と対話するために重要な発見されませんでした、90を介してよりSE 2.6)°(2.8°、SE 2.7)、そのような不一致は、他の飛行機のために不在であった。さらに、モダリティが大幅に単独で90°の動きのための前庭情報からの過小評価は、に比べて(-4.3°、SE 2.1)有意に大きかったような角度(F(2,30)= 4.7、P = 0.017)と相互作用することが発見されたそのような不一致は、45°までの動きのために欠席した中に視覚(-2.0°、SE 2.4)と前庭と視覚情報は、(2.3°、SE 2.2)の条件を組み合わせました。被験者効果との間に有意に署名しているエラー(F(1,15)= 0.7、P = 0.432)がありませんでした。 図5b応答時間の結果を示しています。の有意な主効果があった単独で前庭-kinaesthetic情報に基づいて応答するときにオブザーバーが遅いと答えたモダリティ(F(2,28)= 22.6、P <0.001)(11.0秒、SE 1.0)(9.3秒、SE 0.8)視覚的に比較および結合(9.0 S、SE 0.8)の条件。水平面(10.4秒、SE 1.0)に移動したときに、オブザーバーはサジタル(9.4秒、SE 0.8に比べて遅いと答えた平面の有意な主効果(F(2,28)= 7.5、P = 0.002)もあった)と正面(9.4秒、SE 0.9)飛行機。セグメント角度の有意な主効果または相互作用はありませんでした。被験者間に有意な効果は、応答時間(F(1,14)= 129.1、P <0.001)に発見されました。

図5の結果。 )署名されたエラーがテストプレーンにモダリティを越えて崩壊した。 b)の応答時間は、モダリティの移動平面を越えて崩壊したテストされています。 1 SEM - エラーバーは+ /です。
ディスカッション
パスの統合がうまくオブザーバは元の場所を解決するために使用されることを意味しますが、角度1の過小評価の傾向があるとして確立されてから5まで移動しました。我々の結果は、並進運動のためだけ水平面内でこれを示しています。垂直面での参加者は、角度が通り抜け過大評価または全く偏見を持たない可能性が高くなります。標高地形横断オーバーの推定値が10を誇張する傾向があり、また、なぜ建物のフロア間の空間的ナビゲーションは、11乏しい理由これらの結果は、説明することがあります。これらの結果は、受容体(〜0.58)12 utriculeする球形嚢の相対的な割合での既知の非対称性に関係するかもしれません。視覚情報が存在する場合に比べて前庭-kinaesthetic情報のみに基づいて応答時間が遅く単独で慣性手がかりに基づいて、自分の原点を決定しようとして関連付けられた追加の遅延があるかもしれないことを示唆している前庭知覚が遅く、他の感覚13から16に比べていることを示す最近の研究に関連する可能性があります。全体的な我々の結果は、主に水平面内で実際、人間の経験の動きに関連する可能性がある垂直に移動するときに自分の起源を決定するための代替戦略を使用することができることを示唆している。逐次翻訳はめったに経験している間にさらに、彼らは矢状面で最も頻繁に発生した - そのような我々に向かって歩き、エスカレーターで移動する場合など - エラーが最小である場所。後の実験のインタビューは飛行機の中で異なる戦略を反映するものではありませんでしたが、実験では、この可能性を探るべきである。さらなる自由度を用いた軌道を用いた実験では、もはや重力に身体が異なる配向相対のパスと同様に、MPIのCyberMotionシミュレータで可能になりましたビューの大きなフィールドを使用して、さらに三次元のパスの統合パフォーマンスを調査するために計画されています。
開示事項
利害の衝突が宣言されません。
謝辞
MPIポスドクは、MB-CおよびTMに奨学金、韓国のNRF(R31-2008-000から10008-0)HHBに。カールBeykirchのおかげで、技術支援と科学的な議論のためにマイケルKerger&ヨアヒムテシュ。
資料
Dellの24 "1920×1200 LCDディスプレイ(効果的なフィールドのビューには)1200×1200にマスク
UDP通信を使用してカスタム構築されたジョイスティック
参考文献
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved