
Method Article
MPI CyberMotion Simulator: Üç boyutlu çoklu duyumsal Yolu Entegrasyon araştırmak için bir Roman Hareket Simülatörü Uygulaması
Bu Makalede
Özet
İnsanlarda üç boyutlu olarak kendilerini nasıl gezindiğini anlamak için etkili bir şekilde anlatılmıştır. Yöntemi geleneksel simülatörler tarafından ulaşılamaz şekilde gözlemci hareket edebilen bir hareket simülatörü yararlanır. Sonuçlar dikey hareketi abartılmıştır iken yatay düzlemde hareket, hafife doğrulayın.
Özet
Yol entegrasyon kendinden hareketli bir başlangıç noktası 1 'ye nispeten bir konumda mevcut bir tahmini elde etmek için zaman içinde entegre olduğu bir prosestir. İnsanlar görsel 2-3, işitsel 4 veya eylemsizlik ipuçlarını 5 ile sınırlı yolu entegrasyon yapabilirsiniz. Ancak, birden çok işaretler mevcut, atalet ipuçları - özellikle kinestetik - 6-7 hakim gibi görünüyor. Vizyonun yokluğunda, insanlar kısa mesafelerde (<5 m) ve dönüş açıları (<30 °) abartma, ancak 5 uzun olanlar hafife eğilimindedir. Fiziksel uzayda Hareketi bu nedenle doğru beyin tarafından temsil edilecek gibi görünmüyor.
Kapsamlı iş yatay düzlemde yol entegrasyon değerlendirilmesi üzerinde yapılmıştır, ama küçük, dikey hareketi (vizyon tek başına sanal hareket için 3) hakkında bilinmektedir. Bunun bir nedeni, geleneksel hareket simülatörleri hareket limitimiz küçük bir yelpazesi var olduğunuağırlıklı olarak yatay düzleme ted. Burada yol entegrasyon yatay ve dikey düzlemler arasında benzer olup olmadığını değerlendirmek için hareket geniş bir ürün yelpazesi ile hareket simülatörü 8-9 yararlanmak. Yol navigasyon için eylemsizlik ve görsel ipuçları göreceli katkıları da değerlendirildi.
16 gözlemciler modifiye KUKA antropomorfik robot kolunun flanş monte edilmiş bir koltukta dik oturdu. Duyusal bilgiler görsel (optik akış, sınırlı ömür boyu yıldız alan), (gözleri ile pasif kendinden hareketli kapalı) vestibüler-kinestetik, ya da görsel ve vestibüler-kinestetik hareket ipuçlarını vererek manipüle edildi. Yatay, sagittal ve frontal planda Hareket yörüngeleri iki segment uzunlukları (; ± 0.24 m / s 2 pik ivme 1 m: 0.4 m, 2. 1) oluşuyordu. Iki segment açısı 45 ° veya 90 ° idi ya. Gözlemciler bağırıyorum sunulan bir avatar üzerine eklenmiş oldu bir ok hareket ettirerek kökenlerine geri çektitr.
Gözlemciler dikey düzlemler göre yatay düzlemde hareket açısı boyutu hafife daha fazlaydı. Frontal düzlemde gözlemciler, böyle bir önyargı sagital planda varken açısı boyutu abartma daha fazlaydı. Vestibüler-kinestetik bilgi tek başına dayalı cevaplarken Son olarak, gözlemcilerin daha yavaş yanıt verdi. Vestibüler-kinestetik bilgi tek başına dayalı İnsan yolu entegrasyonu ve böylece görsel bilgi mevcut olduğunda daha uzun sürer. Işaret küçümseyen ve açılı bir sırasıyla yatay ve dikey düzlemlerde aracılığıyla taşındı abartmanin ile tutarlı olduğunu, uzayda kendi kendine hareket nöral temsili içinde büyük çoğunlukla bu insanlar deneyim hareketi aslında ilişkili olabilir hangi olmayan simetrik olduğunu göstermektedir yatay düzlem.
Protokol
1. KUKA Roboter GmbH
- MPI CyberMotion Simülatörü bir 3-2-1 yapılandırma altı ortak seri robot (Şekil 1) oluşur. Bu ticari KUKA Robocoaster (500 kg yük ile değiştirilmiş KR-500 endüstriyel robot) dayanmaktadır. Bir esnek ve güvenli bir deney düzeneği için gerekli fiziksel modifikasyonlar ve yazılım kontrolü yapısının daha önce hareket hızına simülatör ve hızlanma sınırlamalar ve gecikme ve sistem 9 transfer fonksiyonu da dahil olmak üzere, tarif edilmiştir. Bu önceki kurulum gelen değişiklikler aşağıda tanımlanmıştır.

Şekil 1. Mevcut MPI CyberMotion Simülatörü çalışma alanı grafiksel gösterimi.
- Rotasyonlar ile yanal hareketleri birleştiren karmaşık hareket profilleri MPI CyberMotion Simülatörü ile mümkündür. Eksenleri 1, 4 ve 6 ca n sürekli döndürün. Donanım 4 çiftlerinin her iki yönde de limiti eksen 2, 3 ve 5-ucu durur. Doğrusal hareketi maksimum aralığı hareketi başladığı gelen konumda sıkı bir şekilde bağlıdır. MPI CyberMotion simülatör ve son durur mevcut donanım Tablo 1 'de gösterilmiştir.
Eksen Aralığı [derece] Maks. hız [derece / s] Eksen 1 Sürekli 69 Eksen 2 -128 -48 57 Eksen 3 -45 Ila 92 69 Eksen 4 Sürekli 76 Eksen 5 -58 Ile +58 76 Eksen 6 Sürekli 120
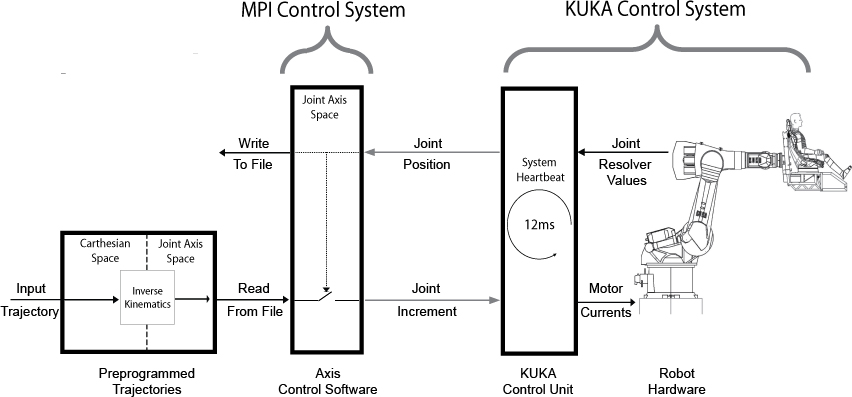
- Herhangi bir deney MPI CyberMotion Simülatörü'nde yapılmadan evvel, her deneysel hareket yörüngesinin bir KUKA simülasyon PC (Office PC) bir test aşamasında uğrar. "Office PC" gerçek robot kolunun taklit ve gerçek robot gibi aynı işletim sistemi ve ekran düzenini içerir KUKA tarafından satılan özel bir üründür. Bir açık devre konfigürasyonu için MPI CyberMotion simülatör bir kontrol sisteminin şematik bir genel görünüşü Şekil 2 'de gösterilmiştir.

Şekil 2. MPI CyberMotion Simülatörü açık-çevrim kontrol sistemi şematik bakış. büyük rakam için buraya tıklayın .
{kind=link}
- Kontrol s ayrıntılarıtructure burada 9 bulunabilir. Kısaca, bu mevcut deneyde kullanılan gibi, bir açık loop konfigürasyonu için, yörüngeleri ters kinematik (Şekil-2) eklem açıları kartezyen koordinat girişi yörüngeleri dönüştürerek önceden programlanmış.
- MPI kontrol sistemi bu istenen ortak açısı artışlarla okur ve motor akımları vasıtasıyla eksen hareketleri gerçekleştirmek için KUKA kontrol sistemi bu gönderir. Ortak çözümleyici değerlerinin yanı sıra mevcut ortak yazmak gibi sırayla MPI kontrol sistemi tarafından dosyadan okunabilir bir sonraki ortak artış tetikleyecek 12 ms bir iç verim oranı, az mevcut eklem açılarının konumları belirler KUKA kontrol sistemine gönderilir diske açısı pozisyonları. MPI ve KUKA kontrol sistemleri arasındaki iletişim KUKA-RSI protokolünü kullanan bir Ethernet bağlantısı gereğidir.
- 5 noktalı emniyet kemeri sistemi (Schroth) ile donatılmış bir yarış arabasının koltuğuna (Recaro Pole Position) bir şasi WHI bağlıch bir ayak desteği içerir. Şasi robot kolu (Şekil 3A) ve flanş monte edilir. Deneyler, kapalı bir kabini (Şekil 3b) içinde oturma katılımcılar tarafından da mümkündür.

Şekil 3. MPİ CyberMotion Simulator kurulum. LCD ekran ile mevcut deney için a) Yapılandırma. b ön projeksiyon stereo ekran ile kapalı bir kabin gerektiren deneyler için) Yapılandırması. c) Ön projeksiyon mono ekran. d) Baş ekran monte edilmiş.
- Deney karanlıkta yapılır gibi, kızılötesi kameralar kontrol odasından görsel izleme sağlar.
2. Görüntüleme
- Çoklu görüntüleme yapılandırmaları LCD ekran, stereo ya da mono ön projeksiyon ve kafa monte görüntüler (Şekil 3) dahil olmak üzere MPI CyberMotion Simülatörü ile mümkündür. Akım içinkendi kendine harekete deney görsel ipuçları aksi karanlıkta test edildi gözlemcilerin önünde 50 cm yerleştirilen bir LCD ekran (Şekil 3a) tarafından sağlanmaktadır.
- Görsel sunum Virtools 4.1 yazılımı kullanılarak oluşturulmuş ve rasgele, sınırlı bir yaşam süresi nokta-alan oluşturmuştur. Katılımcının bakış açısından (yani, 16 x 16 boyutunda x 8 adet) gelen ön, sağ, sol, yukarı ve aşağı doğru sekiz sanal birimler uzanan kübik beyaz daireler 0.02 birimleri oluşan 200.000 eşit büyüklükte parçacıklar doluydu siyah bir arka plan önünde çapında. Noktalar rastgele uzay (mekan içinde homojen bir olasılık dağılımı) arasında dağıtıldı. Sanal birimlerinde Hareketi fiziksel hareket (1 sanal birim = 1 fiziksel metre) ile birlikte 1 ile 1 karşılık ölçeklenir edildi.
- Her parçacığın kaybolan önce iki saniye için gösterilen ve hemen alan içinde rasgele bir yerde tekrar gösteriyordu. Böylece noktalar yarısı değişti onlarınbir saniye içinde pozisyon. 0.085 ve 4 adet bir mesafe arasındaki Nokta katılımcılar (: 13 ° ve 0.3 ° ilgili görsel açıları) için sergilendi.
- Nokta alanında Hareketi UDP protokolünü kullanarak bir Ethernet bağlantısı ile bulaşan MPI kontrol bilgisayarından hareket yörüngelerini alarak fiziksel hareket ile senkronize edildi. Nokta sahanın üzerinden taşırken nokta ortalama sayısı tüm hareketleri sabit kaldı. Bu ekran mutlak büyüklük ölçeği sağlanan, ancak nokta olarak optik akış ve hareket paralaks sabit bir boyutu ile küreler vardı; gözlemciye göre mesafeye göre küçük arıyor.
3. Deneysel Tasarım
- Bir yazarın (MB-C) dışında kabul ettiler 16 katılımcı, giydiği gürültü önleyici deneyci ile iki yönlü iletişime izin vermek için bir mikrofon ile donatılmış kulaklıklar. Ek işitsel gürültü sürekli headpho üzerinden oynandı robot tarafından üretilen ileri maske gürültü nes.
- Katılımcılar UDP protokolünü kullanarak bir Ethernet bağlantısı tarafından iletilen veri ile yanıt düğmeleri ile donatılmış özel bir inşa joystick kullanılır.
- İki hareketin bölümlerinin açısı 45 ° veya 90 ° idi ya. Yatay, sagittal ve frontal planda Hareketleri oluşuyordu: ileri-sağa (FR) veya sağa-forward (RF), aşağı-ileri (DF) veya (FD), ileri-aşağı ve aşağı-sağa doğru (DR) veya sağa- sırasıyla aşağı (RD) hareketleri (Şekil 4a).

Şekil 4. Prosedürü. Deneyde kullanılan yörüngeleri a) şematik gösterimi. b) Duyusal bilgi, test edilen her yörünge türü için sağlanan. c) katılımcılar taşındı düşündüm nerede kökenini belirtmek için kullanılır görev İşaret.rge.jpg "target =" _blank "> büyük rakam için tıklayınız.
- Duyusal bilgi vererek manipüle edildi görsel (optik akış, sınırlı ömür boyu yıldız alan), (gözleri ile pasif kendinden hareketli kapalı) vestibüler-kinestetik, ya da görsel ve vestibüler-kinestetik hareket ipuçları (Şekil 4b).
- Hareket yörüngeleri iki segment uzunlukları (; ± 0.24 m / s 2 pik ivme; Şekil 4b 1 m: 0.4 m, 2. 1) oluşuyordu. Yörüngeler sadece çeviri oluşuyordu. Katılımcıların hiçbir dönmeler oluştu. Hareketten önce her deneme muhtemel çakışmaları azaltmak ve vestibuler sistem kararlı bir duruma başlayarak test edilmiştir emin olmak için, bir 15 saniye süreli duraklama her yörünge öncesinde.
- Gözlemciler ekran (Şekil 4c) sunulan bir avatar üzerine eklenmiş oldu bir ok hareket ettirerek kökenlerine geri çekti. Ok Hareketi yörünge uçağına kısıtlı ve t tarafından kontrol edildidiye joystick. Avatar, frontal, sagital ve yatay açılardan sunuldu. Gözlemciler cevaplamak için herhangi bir veya tüm bakış açılarını kullanmalarına izin verildi. Okun yönü başlangıç çalışmalar boyunca randomize idi.
- Işaret görevi katılımcıların zihinsel bir exocentric temsili bir benmerkezci onların işaret perspektif dönüşümü için gerekli olarak, katılımcılar önce uygulama ve deneysel çalışmalar için avatar referans kökenlerine geri işaret ile ilgili talimatlar verildi. Katılımcılar avatar kendi vücut sanki işaret yapılmalıdır söylendi. Katılımcılar daha sonra exocentric ölçüm tekniği kullanılarak kendi kendine göre fiziksel hedeflere işaret istendi. Örneğin, katılımcılar kendilerini ve katılımcılar avatar göre öne ve aşağı ok işaret etmek gerekli ekran arasında kendi kucağında yarı yolda duran joystick işaret istendi. Tüm katılımcılar bu gerçekleştirmek başardıkkarışıklığı ifade olmadan görevleri.
- Her deney koşulunda 3 kez tekrarlandı ve rasgele sırada sunuldu. İmza hata ve tepki süresi iki ayrı 3 (uçak) * 2 (açı) * 3 (modalite) ölçümler ANOVA tekrarlanan bağımlı değişken olarak analiz edildi. Bir uçta aykırı katılımcıdan yanıt süreleri analizi çıkarıldı.
4. Temsilcisi Sonuçlar
Anlamlı temel etkiler bu faktörler bulunmuştur olarak imzalanan hata sonuçları yöntemleri ve açıları arasında yıkılmıştır. Şekil 5a gözlemciler açısı boyutu küçümsenmeyecek hareketi uçağın etkisi anlamlı (F (2,30) = 7.0, p = 0.003) (gösterir Yatay düzlem üzerinde hareket için) 0 ° 'den daha az ortalama veri (-8,9 °, se 1.8). Böyle bir önyargı sagital (-0.7 °, se 3.7) var iken, frontal planda gözlemci olarak, açısı boyutu (5.3 °, se 2.6) abartma ortalama olarak daha fazlaydı. Whaçısı ve yöntemin Ile temel etkisi anlamlı bulunmamıştır, açı önemli ölçüde uçağı ile etkileşim bulundu (F (2,30) = 11.1, p <0,001) frontal planda yüksek tahminler 45 ° (7.9 ile hareketleri için büyük olduğunu böyle ° edildi , se 2.6) ile 90 ° 'den (2.8 °, se 2.7), böyle bir tutarsızlık diğer uçaklar için yokken. Buna ek olarak, şekli (-4.3 °, se 2.1) ile 90 ° hareketleri için yalnız vestibüler bilgi düşük tahminler önemli ölçüde daha büyük olduğu gibi karşılaştırıldığında (F (2,30) = 4.7, p = 0.017) anlamlı açısı ile etkileşim bulundu Bu tür uyumsuzluklar 45 ° aracılığıyla hareketler için yok iken görsel (-2.0 °, se 2.4) ve vestibüler ve görsel bilgi, (2.3 °, se 2.2) koşullarına birleştirdi. Konular etkisi arasında anlamlı imzalanan hatası (F (1,15) = 0.7, p = 0.432) bulundu. Şekil 5b tepki süresi sonuçlarını gösterir. Önemli bir temel etkisi vardı(9.0 (9.3 s, se 0.8) görsel ve kombine göre vestibüler-kinestetik bilgileri tek başına (11.0 s, se 1.0) dayanan cevaplarken gözlemciler yavaş yanıt yöntemi (F (2,28) = 22.6, p <0,001) s, se 0.8) şartları. Yatay düzlemde (10.4 s, se 1.0) de taşındı gözlemci sagital (9.4 s, se 0.8 ile karşılaştırıldığında yavaş yanıt düzlemde önemli bir temel etkisi (F (2,28) = 7.5, p = 0.002) vardı ) ve frontal (9.4 s, se 0.9) düzlemler. Segmenti açısı anlamlı ana etkisi veya etkileşim vardı. Konularda etkisi arasında anlamlı bir yanıt süresi (F (1,14) = 129.1, p <0,001) tespit edilmiştir.

Şekil 5. Sonuçları. a) İmzalı hata test uçakları için yöntemidir boyunca çöktü. b) Tepki süresi yöntemleri için hareket düzlemleri boyunca çöktütest edilmiştir. 1 sem - Hata çubukları + / vardır
Tartışmalar
Yol entegrasyon iyi bir gözlemci kaynaklandığı yer çözmek için kullanılan yöntemler, ancak açısı birinin düşük tahminler eğilimli olarak kurulmuştur 5 üzerinden taşındı. Bizim sonuçlarımız translasyonel hareketi için sadece yatay düzlemde içinde bunu gösteriyor. Dikey düzlemde katılımcılar açı ile hareket abartma ya da hiç bir sapmaya sahip olma olasılığı daha yüksektir. Yüksekliği arazi geçilen üzerinden tahminleri 10 abartılı eğilimindedir ve ayrıca neden bir binanın farklı katlarda arasındaki uzaysal gezinti 11 kötü neden bu sonuçları açıklayabilir. Bu sonuçlar, aynı zamanda reseptörler (~ 0.58) 12 utricule üzere sakkül nispi orantılı olarak bilinir asimetri ile ilişkili olabilir. Görsel bilgi mevcut olduğunda kıyasla vestibüler-kinestetik bilgi tek başına göre daha yavaş tepki süresi sadece eylemsizlik ipuçları dayanan bir kökeni belirlemeye çalışıyor ilişkili ek gecikmeler olabileceğini düşündürmektedirBu vestibüler algı gösteren son çalışmalar ile ilgili olabilir yavaş diğer duyular 13-16 karşılaştırılır. Genel bizim sonuçlarımız yatay düzlem içerisinde çoğunlukla o insanların deneyim hareketi aslında ilişkili olabilir dikey olarak hareket ederken, kişinin menşe tespiti için alternatif stratejiler kullanılabilir olabileceğini düşündürmektedir. Sıralı çeviriler nadiren yaşanan iken Dahası, sagital düzlemde en sık ortaya çıkabilir - örneğin biz doğru yürürler ve bir yürüyen merdiven hareket olduğu gibi - hatalar minimal nerede. Post-deney görüşmeler uçakları arasında farklı stratejiler yansıtmadığını da, deneyler bu olasılığı araştırılmalıdır. Yerçekimi gövde ile, farklı bir yönü olan nispi özgürlük, uzun yolları ilave derece kullanılarak, hem de MPI CyberMotion simülatör ile artık mümkün olan bakış daha büyük alanları kullanarak yörüngeleri ile deneyler ayrıca üç boyutlu olarak yolu entegrasyonu performansı araştırmak için planlanır.
Açıklamalar
Çıkar çatışması ilan etti.
Teşekkürler
MPI Postdoc MB-C ve TM burslar; Kore UÇK (R31-2008-000-10008-0) HHB için. Karl Beykirch sayesinde, teknik yardım ve bilimsel tartışma için Michael Kerger & Joachim Tesch.
Malzemeler
KUKA KR 500 Ağır Endüstriyel Robot
Dell 24 "1920x1200 LCD ekran (etkili bir sahagörünümü) 1200 x 1200 habersizdi
UDP iletişim ile özel inşa joystick
Referanslar
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır