
Method Article
MPI CyberMotion Simulator: Implementación de un simulador de movimiento Novela encargado de investigar la integración multisensorial ruta en tres dimensiones
En este artículo
Resumen
Una forma eficiente de obtener una idea de cómo los seres humanos se navega en tres dimensiones se describe. El método se aprovecha de un simulador de movimiento capaz de mover los observadores de manera inalcanzables por los simuladores tradicionales. Los resultados confirman que el movimiento en el plano horizontal se subestima, mientras que el movimiento vertical está sobreestimada.
Resumen
Integración Path es un proceso en el cual se integra auto-movimiento con el tiempo para obtener una estimación de la propia posición actual con respecto a un punto de partida 1. Los seres humanos pueden hacer la integración trayectoria basada exclusivamente en la visual de 2-3, auditiva 4, o 5 señales de inercia. Sin embargo, con señales de múltiples señales presentes, sobre todo de inercia - cinestésica - parecen dominar 6-7. En ausencia de la visión, los seres humanos tienden a sobreestimar las distancias cortas (<5 m) y los ángulos de giro (<30 °), pero subestiman los más largos 5. Movimiento a través del espacio físico por lo tanto, no parece ser exactamente representada por el cerebro.
Una amplia labor que se ha hecho en la evaluación de la integración de ruta en el plano horizontal, pero se sabe poco sobre el movimiento vertical (véase el punto 3 para el movimiento virtual a partir de la visión solamente). Una razón para esto es que los simuladores de movimiento tradicionales tienen una pequeña gama de movimiento restriccionesTed principalmente al plano horizontal. Aquí se aprovecha de un simulador de movimiento de 8-9 con una amplia gama de movimiento para evaluar si la integración ruta de acceso es similar entre los planos horizontal y vertical. Las contribuciones relativas de las señales de inercia y visuales para el recorrido de navegación también se evaluaron.
16 observadores se sentó en posición vertical en un asiento montado en la brida de un brazo robot antropomórfico KUKA modificado. La información sensorial fue manipulado por proporcionar visuales (de flujo óptico, de campo limitada de por vida de estrella), vestíbulo-kinestésica (movimiento pasivo sí con los ojos cerrados), o visual y kinestésica-vestibular señales de movimiento. Las trayectorias de movimiento en los planos horizontales, sagital y frontal consta de dos segmentos de longitud (1 ª: 0,4 m, 2 ª: 1 m; ± 0,24 m / s 2 aceleración máxima). El ángulo de los dos segmentos era o 45 ° o 90 °. Los observadores señalaron de nuevo a su origen al mover una flecha que se superpone a un avatar presentado en el SCREen.
Los observadores eran más propensos a subestimar el tamaño del ángulo de movimiento en el plano horizontal en comparación con los planos verticales. En el plano frontal observadores eran más propensos a sobreestimar el tamaño del ángulo mientras que no hubo sesgo en el plano sagital. Por último, los observadores respondieron lento al responder sobre la base de vestibular-cinestésica información por sí sola. La integración camino humano sobre la base de vestíbulo-cinestésica información por sí sola por lo tanto lleva más tiempo que cuando la información visual está presente. Esto es consistente con señalar subestimar o sobreestimar el ángulo se ha movido a través de los planos horizontal y vertical, respectivamente, sugiere que la representación neural de auto-movimiento en el espacio no es simétrica, que puede estar relacionado con el hecho de que el movimiento de los seres humanos experimentan su mayor parte dentro del plano horizontal.
Protocolo
1. KUKA Roboter GmbH
- El simulador de CyberMotion MPI consta de un robot de serie de seis conjunta en una configuración de 3-2-1 (Figura 1). Se basa en la comercial Robocoaster KUKA (una modificación KR-500 robot industrial con un kg de carga útil 500). Las modificaciones físicas y la estructura del software de control necesarios para tener una configuración experimental flexible y seguro se han descrito previamente, incluyendo la velocidad del simulador de movimiento y las limitaciones de aceleración, y por la demora y la función de transferencia del sistema 9. Modificaciones de esta configuración anterior se definen a continuación.

Figura 1. Representación gráfica de la corriente del espacio de trabajo MPI CyberMotion Simulator.
- Perfiles de movimiento complejos que combinan los movimientos laterales con rotaciones son posibles con el simulador de CyberMotion MPI. Ejes 1, 4 y 6 ca n girar continuamente. 4 pares de hardware final se detiene límite del eje 2, 3 y 5 en ambos sentidos. El alcance máximo de los movimientos lineales es fuertemente dependiente de la posición desde la cual se inicia la circulación. El hardware actual se detiene al final del Simulador de CyberMotion MPI se muestran en la Tabla 1.
Eje Rango [grados] Max. velocidad [grados / s] Eje 1 Continuo 69 Eje 2 -128 A -48 57 Eje 3 -45 A 92 69 Eje 4 Continuo 76 Eje 5 -58 A 58 76 Eje 6 Continuo 120
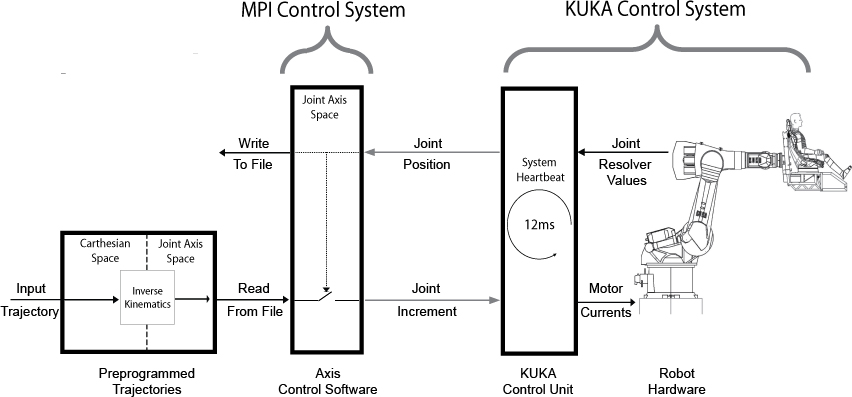
- Antes de cualquier experimento se realiza en el simulador de CyberMotion MPI, cada una trayectoria de movimiento experimental, se somete a una fase de pruebas en un PC de simulación de KUKA (PC de la oficina). El "PC de la oficina" es un producto especial se vende por KUKA que simula el brazo del robot real, e incluye el sistema operativo idéntico y diseño de la pantalla de control como el robot real. Una descripción esquemática del sistema de control del simulador CyberMotion MPI para una configuración de bucle abierto se muestra en la Figura 2.

Figura 2. Presentación esquemática del sistema de control en lazo abierto del Simulador de CyberMotion MPI. Haga clic aquí para agrandar la figura .
{kind=link}
- Los detalles de la s de controltructura se puede encontrar aquí 9. En resumen, para una configuración de bucle abierto como la utilizada en el experimento actual, las trayectorias son pre-programados mediante la conversión de las trayectorias de entrada en coordenadas cartesianas a ángulos espaciales conjuntos a través de cinemática inversa (Figura 2).
- El sistema de control MPI lee en estos incrementos angulares deseados conjuntas y envía estos al sistema de control de KUKA para realizar movimientos de los ejes a través de corrientes de motor. Valores conjuntos resolvedor se envían al sistema de control de KUKA que determina las posiciones actuales conjuntos de ángulo en una tasa interna de 12 ms, que a su vez desencadenar el siguiente incremento conjunto para ser leído desde el archivo en el sistema de control MPI así como escribir la corriente conjunta posiciones angulares en el disco. La comunicación entre el MPI y sistemas de control de KUKA es una conexión de Ethernet utilizando el protocolo de KUKA-RSI.
- Un asiento de coche de carreras (RECARO Pole Position) equipado con una de 5 puntos del cinturón de seguridad del sistema (Schroth) está unido a un chasis de WHIch incluye un reposapiés. El chasis está montado en la brida del brazo de robot (Figura 3a). Los experimentos también son posibles por los participantes para sentarse dentro de una cabina cerrada (Figura 3b).

Figura 3. CyberMotion MPI configuración del simulador. a) la configuración para el experimento actual con pantalla LCD. b) Configuración de los experimentos que requieren una cabina cerrada con la pantalla frontal estéreo de proyección. c) Proyección frontal mono pantalla. d) Head Mounted Display.
- Como el experimento se lleva a cabo en la oscuridad, cámaras infrarrojas permiten el control visual de la sala de control.
2. Visualización
- Múltiples configuraciones de visualización son posibles con el simulador de CyberMotion MPI incluyendo el LCD, estéreo o mono de proyección frontal, y muestra la cabeza montadas (Figura 3). Para la corrientelas señales visuales del experimento a la libre movimiento son proporcionados por una pantalla LCD (Figura 3a) coloca 50 cm delante de los observadores que se han probado lo contrario en la oscuridad.
- La presentación visual se ha generado utilizando el software Virtools 4.1 y consistió en una muestra aleatoria, el tiempo de vida limitado de puntos de campo. Un paralelepípedo que se extiende ocho unidades virtuales al frente, hacia arriba derecha, izquierda, y hacia abajo desde el punto de vista del participante (es decir, 16 x 16 x 8 unidades de tamaño) se llenó con 200.000 partículas de igual tamaño que consisten en círculos blancos 0,02 unidades de diámetro en la parte delantera de un fondo negro. Los puntos se distribuyeron al azar a través del espacio (distribución de probabilidad homogénea dentro del espacio). Movimiento en unidades virtuales se escala para corresponder 1 a 1 con el movimiento físico (1 unidad virtual = 1 metro física).
- Cada partícula se muestran durante dos segundos antes de desaparecer y de inmediato a aparecer de nuevo en una ubicación aleatoria en el espacio. Así, la mitad de los puntos cambiaron suposición dentro de un segundo. Puntos entre una distancia de 0,085 y 4 unidades fueron exhibidas a los participantes (correspondientes ángulos visuales: 13 ° y 0.3).
- Movimiento dentro del campo de punto se sincroniza con el movimiento físico mediante la recepción de las trayectorias de movimiento de la computadora de control de MPI transmitida por una conexión de Ethernet utilizando el protocolo UDP. Cuando se mueve a través del punto de campo el número promedio de puntos se mantuvo constante para todos los movimientos. Esta pantalla siempre y cuando no escala de tamaño absoluto, pero el flujo óptico y paralaje de movimiento en forma de puntos eran esferas con un tamaño fijo, buscando más pequeño en función de su distancia relativa al observador.
3. Diseño Experimental
- 16 participantes, que eran ingenuos al experimento con la excepción de uno de los autores (MB-C), llevaba unos auriculares con cancelación de ruido equipados con un micrófono para permitir la comunicación bidireccional con el experimentador. El ruido adicional auditiva se jugó de forma continua a través de la headpho nes al ruido producido por la máscara de más del robot.
- Los participantes usaron una palanca de mando a la medida equipado con botones de respuesta con los datos transmitidos por una conexión de Ethernet utilizando el protocolo UDP.
- El ángulo de los dos segmentos de movimiento era o 45 ° o 90 °. Los movimientos en los planos horizontales, sagital y frontal, consistió en: adelante-hacia la derecha (FR) o hacia la derecha hacia adelante-(RF), hacia abajo-adelante (DF) o hacia adelante-hacia abajo (FD), y hacia abajo, hacia la derecha-(HD) o hacia la derecha- a la baja (DR) movimientos respectivamente (Figura 4A).

Figura 4. Procedimiento. a) Representación esquemática de las trayectorias utilizados en el experimento. b) La información sensorial para cada tipo de trayectoria probada. c) Señalar la tarea utiliza para indicar el origen de los participantes pensaron que se había trasladado desde.rge.jpg "target =" _blank "> Haga clic aquí para agrandar la figura.
- La información sensorial fue manipulado por proporcionar visual (flujo óptico, de campo limitada de por vida de estrella), vestíbulo-kinestésica (movimiento pasivo sí con los ojos cerrados), o las señales de movimiento visual y vestibular-cinestésica (Figura 4b).
- Las trayectorias del movimiento consistió en dos longitudes de los segmentos (1 ª: 0,4 m, 2 ª: 1 m; ± 0,24 m / s 2 aceleración máxima, la figura 4b). Las trayectorias consistió en la traducción solamente. No hay rotaciones de los participantes se produjo. Para reducir la posible interferencia con el movimiento antes de cada prueba y asegurarse de que el sistema vestibular se puso a prueba a partir de un estado de equilibrio, una pausa de 15 s precedida de cada trayectoria.
- Los observadores señalaron de nuevo a su origen al mover una flecha que se superpone a un avatar presenta en la pantalla (Figura 4c). Movimiento de la flecha estaba limitada al plano de la trayectoria y controlado por tque joystick. El avatar se presentó desde puntos de vista frontal, sagital y horizontal. Los observadores se les permitió utilizar cualquiera o todos los puntos de vista para responder. La orientación inicial de la flecha fue al azar entre los ensayos.
- Como la tarea requiere que apunta a los participantes para transformar su perspectiva mental que apunta a una egocéntrica a una representación exocéntrico, los participantes se les dio instrucciones sobre cómo apuntar de nuevo a su origen, con referencia al avatar antes de la práctica y los ensayos experimentales. Los participantes dijeron que se debe señalar como si el avatar era su propio cuerpo. Los participantes fueron instruidos para que apunte a las metas físicas en relación con el mismo utilizando la técnica de medición exocéntrico. Por ejemplo, los participantes fueron instruidos para que apunte a la palanca de mando apoyada en su regazo a mitad de camino entre ellos y la pantalla, que exige a los participantes a señalar en la flecha hacia delante y hacia abajo en relación con el avatar. Todos los participantes fueron capaces de realizar estastareas sin expresar la confusión.
- Cada condición experimental se repitió 3 veces y se presentan en orden aleatorio. Firmado el error y el tiempo de respuesta se analizaron como variables dependientes en dos por separado 3 (avión) * 2 (ángulo) * 3 (modalidad) ANOVA de medidas repetidas. Los tiempos de respuesta de un participante outlier extremo se eliminaron del análisis.
4. Los resultados representativos
Firmado resultados de error se derrumbó en todas las modalidades y los ángulos que no tiene efectos principales significativos fueron encontrados por estos factores. Figura 5a muestra el efecto principal significativo del plano de movimiento (F (2,30) = 7.0, p = 0,003) donde los observadores subestimado el tamaño angular ( datos promedio de menos de 0 °) para el movimiento en el plano horizontal (-8,9 °, SE 1,8). En el plano frontal observadores eran más propensos a sobrestimar el promedio de tamaño del ángulo (5,3 °, SE 2,6), mientras que no hubo sesgo en el plano sagital (-0,7 °, SE 3,7). Blancoile los efectos principales del ángulo y la modalidad no fueron significativas, el ángulo se encontró a interactuar de manera significativa con el plano (F (2,30) = 11,1, p <0,001) de tal manera que una sobreestimación en el plano frontal eran más grandes para los movimientos a través de 45 ° (7,9 ° , SE 2,6) que a través de 90 ° (2,8 °, sí 2,7), mientras que tal discrepancia estuvo ausente de los otros planos. Además, la modalidad se encontró que interactúan significativamente con el ángulo (F (2,30) = 4,7, p = 0,017) de tal manera que subestimaciones de la información vestibular solo para los movimientos a través de 90 ° fueron significativamente mayores (-4,3 °, SE 2,1) en comparación con lo visual (-2,0 °, SE 2,4) y la información vestibular y visual combinada (2.3 °, SE 2.2) las condiciones, mientras que esas discrepancias estaban ausentes de los movimientos a través de 45 °. N significativa entre el efecto sujetos fue firmado por error (F (1,15) = 0,7, p = 0,432). Figura 5b muestra los resultados de tiempo de respuesta. Hubo un efecto principal significativo de lamodalidad (F (2,28) = 22,6, p <0,001), donde los observadores más lento respondió al responder sobre la base de vestíbulo-cinestésica información por sí sola (11,0 s, SE 1,0) en comparación a lo visual (9,3 s, SE 0,8) y combinado (9,0 S, SE 0,8) condiciones. También hubo un efecto principal significativo del plano (F (2,28) = 7.5, p = 0,002) donde los observadores más lento respondió cuando se mueve en el plano horizontal (10,4 s, SE 1,0) en comparación con el plano sagital (9,4 s, 0,8 en sí ) y los frontales (9,4 s, SE 0,9) aviones. No hubo un efecto principal significativo del ángulo de segmento o cualquier interacción. Una significativa entre el efecto de los sujetos se encontró un tiempo de respuesta (F (1,14) = 129,1, p <0,001).

Figura 5. Resultados. un error) Firmado derrumbó en la modalidad de los aviones de prueba. b) El tiempo de respuesta se derrumbó en los planos de movimiento para las modalidadesprobado. Las barras de error son de + / - 1 sem
Discusión
Ruta de la integración ha sido bien establecida como un medio utilizado para resolver, donde se originó un observador, pero es propenso a subestimar el ángulo se ha desplazado a 5. Nuestros resultados muestran esto para movimiento de traslación, pero sólo en el plano horizontal. En los planos verticales participantes son más propensos a sobreestimar el ángulo mueve a través de o que no tienen sesgo en absoluto. Estos resultados pueden explicar por qué las estimaciones de elevación del recorrido, sobre terreno tienden a ser exagerados 10 y también la razón por la navegación espacial entre los diferentes pisos de un edificio es pobre 11. Estos resultados también pueden estar relacionados con las asimetrías conocidos en la proporción relativa de sáculo a utrícula receptores (~ 0,58) 12. Menor tiempo de respuesta basada en el vestíbulo-cinestésica información por sí sola en comparación a cuando la información visual está presente sugiere que puede haber demoras adicionales asociados con tratar de determinar el origen de uno basado en las señales de inercia, que solopueden estar relacionados con estudios recientes que demuestran que la percepción vestibular es lento en comparación a los otros sentidos 13-16. En general nuestros resultados sugieren que las estrategias alternativas para determinar el origen de uno puede ser utilizado cuando se mueve verticalmente, que pueden relacionarse con el hecho de que el movimiento de los seres humanos experimentan su mayor parte dentro del plano horizontal. Además, mientras que las traducciones secuenciales es poco frecuente que se produzcan con mayor frecuencia en el plano sagital - donde los errores son mínimos - por ejemplo, cuando caminamos hacia adelante y una escalera mecánica. Mientras que experimento después de las entrevistas no reflejan las diferentes estrategias entre los planos, los experimentos deben explorar esta posibilidad. Los experimentos con trayectorias con mayores grados de libertad, más caminos, con el cuerpo de manera diferente en relación orientada a la gravedad, así como el uso de grandes campos de visión que ahora son posibles con el simulador de CyberMotion MPI están previstas para investigar aún más el rendimiento camino de integración en tres dimensiones.
Divulgaciones
No hay conflictos de interés declarado.
Agradecimientos
MPI Postdoc estipendios para MB-C y TM, de Corea del NRF (R31-2008-000-10008-0) de HHB. Gracias a Karl Beykirch, Michael Kerger y Tesch Joaquín de asistencia técnica y la discusión científica.
Materiales
KUKA KR 500 Heavy Duty robot industrial
RECARO Pole Posición del asiento
Dell de 24 "1920x1200 LCD (campo efectivode vista enmascarada de 1200 x 1200)
Palanca de mando construido a medida con la comunicación UDP
Referencias
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados