
Method Article
MPI Simulator CyberMotion: Implementação de um simulador de movimento Novela Caminho para Investigar Integração multisensorial em Três Dimensões
Neste Artigo
Resumo
Uma maneira eficiente para obter insights sobre como os seres humanos se navegar em três dimensões é descrito. O método tira proveito de um simulador de movimento capaz de mover os observadores de formas inatingíveis por simuladores tradicionais. Os resultados confirmam que o movimento no plano horizontal é subestimado, enquanto o movimento vertical é superestimado.
Resumo
Integração caminho é um processo em que a auto-movimento é integrado com o tempo para obter uma estimativa da própria posição actual em relação a um ponto de partida 1. Os seres humanos podem fazer a integração caminho baseado exclusivamente no visual 2-3, auditiva 4 ou 5 pistas inerciais. No entanto, com pistas múltiplas presentes, sugestões inercial - particularmente cinestésica - parecem dominar 6-7. Na ausência de visão, os seres humanos tendem a superestimar distâncias curtas (<5 m) e ângulos de giro (<30 °), mas subestimar os mais longos 5. Movimento através do espaço físico, por conseguinte, não parece ser precisamente representado pelo cérebro.
Extenso trabalho tem sido feito na avaliação integração caminho no plano horizontal, mas pouco se sabe sobre o movimento vertical (ver 3 para o movimento virtual de visão sozinho). Uma razão para isso é que os simuladores de movimento, tradicionais têm um pequeno intervalo de movimento restriçõested principalmente em relação ao plano horizontal. Aqui temos tirar proveito de um simulador de movimento 8-9 com uma grande gama de movimento para avaliar se a integração caminho é semelhante entre planos horizontal e vertical. As contribuições relativas de sinais de inércia e visuais para o caminho de navegação também foram avaliados.
16 observadores sentou em um assento montado na flange de um braço robô modificado KUKA antropomórfica. A informação sensorial foi manipulado por fornecer pistas visuais de movimento (fluxo óptico, campo de estrelas limitado tempo de vida), vestibular, cinestésica (movimento auto-passiva com os olhos fechados), ou visual e vestibular-cinestésica. Trajetórias de movimento na horizontal, planos sagital e frontal consistiu em dois comprimentos de segmento (1: 0,4 m, 2: 1 m; ± 0,24 m / s aceleração de pico 2). O ângulo dos dois segmentos ou era de 45 ° ou 90 °. Observadores apontam de volta para sua origem, movendo uma flecha que foi sobreposto um avatar apresentado no screen.
Os observadores eram mais propensos a subestimar tamanho do ângulo para o movimento no plano horizontal em relação aos planos verticais. Nos observadores no plano frontal eram mais propensos a superestimar o tamanho ângulo enquanto não houve viés no plano sagital. Finalmente, os observadores responderam mais lento ao responder com base no vestibular-cinestésica informação só. Integração caminho humano com base em vestibular-cinestésica informação por si só, assim, leva mais tempo do que quando a informação visual está presente. Que é consistente com a apontar subestimando e superestimando a um ângulo moveu-se através nos planos horizontal e vertical, respectivamente, sugere que a representação neural de auto-movimento através do espaço é não-simétrico que podem estar relacionados com o facto de que o movimento experiência seres humanos principalmente dentro do plano horizontal.
Protocolo
1. KUKA Roboter GmbH
- O simulador de CyberMotion MPI consiste de um robô de seis conjunta de série numa configuração 3-2-1 (Figura 1). Baseia-se o comercial KUKA Robocoaster (um modificado KR-500 robô industrial com uma carga de 500 kg). As modificações físicas e da estrutura de controlo de software necessários para ter uma configuração flexível e segura experimental foram anteriormente descritas, incluindo a velocidade do simulador de movimento e as limitações de aceleração, e os atrasos e função de transferência do sistema 9. Modificações a partir desta configuração anterior estão definidos abaixo.

Figura 1. Representação gráfica da CyberMotion MPI atual espaço de trabalho Simulator.
- Perfis de movimento complexos que combinam movimentos laterais com rotações são possíveis com o Simulador CyberMotion MPI. Eixos 1, 4 e 6 ca n rodar continuamente. 4 pares de hardware final de pára limite eixo 2, 3 e 5 em ambas as direcções. O alcance máximo de movimentos lineares é fortemente dependente da posição a partir da qual o movimento começa. O hardware corrente final de pára do Simulador CyberMotion MPI são mostrados na Tabela 1.
Eixo Faixa de [graus] Max. velocidade [graus / s] Eixo 1 Contínuo 69 Eixo 2 -128 A -48 57 Eixo 3 -45 A 92 69 Eixo 4 Contínuo 76 Eixo 5 -58 A +58 76 Eixo 6 Contínuo 120
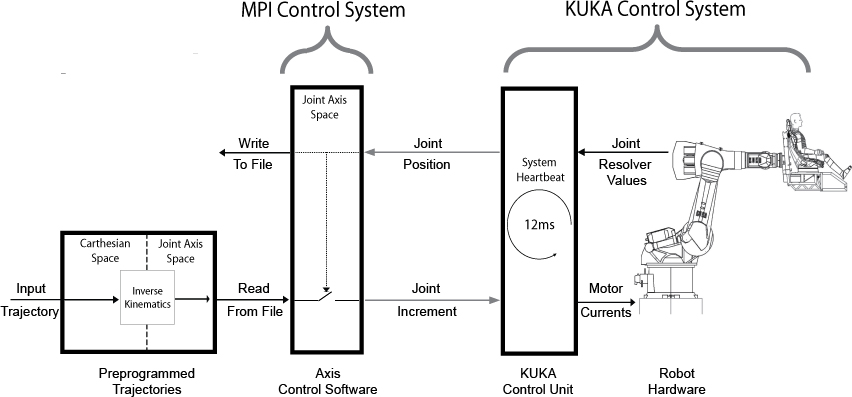
- Antes de qualquer experiência é realizada na Simulator CyberMotion MPI, cada trajetória de movimento experimental passa por uma fase de testes em um PC simulação KUKA (PC Office). O "PC Office" é um produto especial vendido por KUKA que simula o braço do robô real e inclui o sistema operacional idênticos e layout da tela de controle como o robô real. Uma visão geral esquemática do sistema de controlo do Simulador CyberMotion MPI para uma configuração de malha aberta é mostrado na Figura 2.

Figura 2. Visão esquemática do sistema de controle em malha aberta do Simulador CyberMotion MPI. Clique aqui para ampliar a figura .
{kind=link}
- Os detalhes do s controlotrutura pode ser encontrada aqui 9. Em resumo, para uma configuração de malha aberta, tais como a utilizada na experiência de corrente, as trajectórias são pré-programado através da conversão de trajectórias de entrada em coordenadas cartesianas para ângulos espaciais conjuntos através cinemática inversa (Figura 2).
- O sistema de controlo MPI lê nestes desejados incrementos angulares das articulações e envia-os para o sistema de controlo KUKA para executar movimentos de eixo por meio de correntes do motor. Resolvedor valores comuns são enviados para o sistema de controle KUKA que determina as atuais posições angulares conjuntas a uma taxa interna de 12ms, o que por sua vez, acionar o próximo incremento conjunta a ser lidas no arquivo, o sistema de controle MPI, bem como escrever o conjunto atual posições angulares para o disco. A comunicação entre o IPM e controle de sistemas de KUKA é por uma conexão Ethernet usando o protocolo KUKA-RSI.
- Um assento de carro de corrida (RECARO Pole Position) equipado com um 5-ponto sistema de cinto de segurança (Schroth) é anexado a um chassis which inclui um apoio para os pés. O chassis é montado na flange do braço de robô (Figura 3a). As experiências são também possível pelos participantes de assento dentro de uma cabine fechada (Figura 3b).

Figura 3. MPI configuração Simulator CyberMotion. a) Configuração de experiência atual com visor LCD. b) Configuração para experimentos que necessitam de uma cabine fechada com visor frontal de projeção estéreo. c) Frente visor mono de projeção. d) Head Mounted Display.
- Como o experimento é realizado em trevas, câmeras infravermelhas permitem o acompanhamento visual da sala de controle.
2. Visualização
- Várias configurações de visualização são possíveis com o Simulador CyberMotion MPI incluindo LCD, estéreo ou mono projeção frontal, e exibe cabeça montado (Figura 3). Para a correntepistas experimentais visuais para a auto-movimento são fornecidos por um visor LCD (Figura 3a) colocada 50 cm em frente dos observadores que foram testados em contrário, no escuro.
- A apresentação visual foi gerada usando software Virtools 4.1 e consistiu de uma amostra aleatória de vida limitada, campo dot-tempo. Um cubóide estendendo oito unidades virtuais para a frente, direita, esquerda, para cima e para baixo a partir do ponto de vista do participante (isto é, 16 x 16 x 8 unidades de tamanho) foi preenchido com partículas de tamanho 200.000 iguais constituídos por círculos brancos 0,02 unidades de diâmetro na frente de um fundo preto. Os pontos foram aleatoriamente distribuídos por todo o espaço (distribuição de probabilidade homogénea dentro do espaço). Movimento em unidades virtuais foi dimensionado para corresponder 1 para 1 com o movimento físico (1 unidade virtual = 1 metro físico).
- Cada partícula foi mostrado por dois segundos antes de fuga e imediatamente a exibir-se novamente numa localização aleatória no interior do espaço. Assim metade dos pontos mudado o seuposição dentro de um segundo. Pontos entre uma distância de 0,085 e 4 unidades foram exibidos para os participantes (correspondentes ângulos visuais: 13 ° e 0,3 °).
- Movimento dentro do campo ponto foi sincronizado com o movimento físico, recebendo trajetórias de movimento a partir do computador de controle MPI transmitida por uma conexão Ethernet usando o protocolo UDP. Quando se deslocam através do ponto de campo-o número médio de pontos permaneceu constante para todos os movimentos. Esta exposição não forneceu escala de tamanho absoluto, mas o fluxo óptico e paralaxe de movimento como pontos eram esferas com um tamanho fixo; procura menor de acordo com sua distância em relação ao observador.
3. Projeto Experimental
- 16 participantes, que nunca tinham estado expostos à experiência com a exceção de um autor (MB-C), usavam fones de ouvido com cancelamento de ruído equipados com um microfone para permitir comunicação bidirecional com o experimentador. Ruído auditivo adicional foi continuamente jogado através do headpho nes ao ruído máscara produzidos posteriormente pelo robô.
- Os participantes usaram um joystick personalizado construído equipado com botões de resposta com os dados transmitidos por uma conexão Ethernet usando o protocolo UDP.
- O ângulo dos dois segmentos de circulação era ou 45 ° ou 90 °. Movimentos na horizontal, planos sagital e frontal consistiu em: frente-direita (FR) ou para a direita para a frente (RF), baixo-frente (DF) ou encaminhar-descendente (FD), e para baixo-direita (DR) ou para a direita- para baixo (RD) movimentos respectivamente (Figura 4a).

Figura 4. Processo. a) Representação esquemática de trajetórias utilizadas no experimento. b) A informação sensorial fornecida para cada tipo de trajetória testado. c) Apontar tarefa utilizado para indicar a origem de onde os participantes pensavam que havia se mudado de.rge.jpg "target =" _blank "> Clique aqui para ampliar a figura.
- A informação sensorial foi manipulado, proporcionando visual (fluxo óptico, campo de estrelas limitado tempo de vida), vestibular, cinestésica (movimento auto-passiva com os olhos fechados), ou sinais de movimento visual e vestibular-cinestésica (Figura 4B).
- Trajectórias de circulação consistia de dois comprimentos de segmento (1: 0,4 m, 2: 1 m; ± 0,24 m / s aceleração de pico 2; Figura 4b). Trajetórias consistiu da tradução apenas. Sem rotações dos participantes ocorreu. Para reduzir a interferência possível a partir de movimento, antes de cada ensaio e assegurar que o sistema vestibular foi testado a partir de um estado estacionário, de uma pausa 15 s precedido cada trajectória.
- Observadores apontam de volta para sua origem, movendo uma flecha que foi sobreposto um avatar apresentado na tela (Figura 4c). O movimento da seta foi restringido ao plano da trajectória e controlada por tele joystick. O avatar foi apresentado do ponto de vista frontal, sagital e horizontal. Os observadores foram autorizados a usar qualquer ou todos os pontos de vista para responder. A orientação inicial da seta foi randomizado entre os ensaios.
- Como a tarefa apontando necessário que os participantes mentalmente transformar sua perspectiva apontando a partir de um egocêntrico para uma representação excêntrica, os participantes receberam instruções sobre como apontar de volta para sua origem com referência ao avatar antes da prática e ensaios experimentais. Os participantes foram informados de que apontando deve ser feita como se o avatar fosse o seu próprio corpo. Os participantes foram então instruídos a apontar para metas físicas em relação ao auto usando a técnica de medição excêntrica. Por exemplo, os participantes foram instruídos a apontar para o joystick descansa em seu colo a meio caminho entre si e com a tela, o que exigia que os participantes apontam a seta para frente e para baixo em relação ao avatar. Todos os participantes foram capazes de realizar estestarefas sem expressar confusão.
- Cada condição experimental foi repetido 3 vezes e apresentados em ordem aleatória. Assinado erro e tempo de resposta foram analisados como variáveis dependentes em dois 3 separado (avião) * 2 (ângulo) * 3 (modalidade) de medidas repetidas ANOVA. Os tempos de resposta de um participante outlier extremo foram removidos a partir de análise.
4. Os resultados representativos
Resultados de erro assinadas são recolhidos através de modalidades e ângulos como observaram efeitos significativos principais foram encontrados para esses fatores. Figura 5a mostra o efeito significativo do plano de movimento (F (2,30) = 7,0, p = 0,003) onde os observadores subestimaram o tamanho angular ( dados médios inferiores a 0 °) para o movimento no plano horizontal (-8,9 °, SE 1,8). Nos observadores no plano frontal eram mais propensos a superestimar, em média, tamanho do ângulo (5,3 °, SE 2,6), enquanto não houve viés no plano sagital (-0,7 °, SE 3,7). While efeitos principais de ângulo e modalidade não foram significativas, o ângulo foi encontrada para interagir com avião significativamente (F (2,30) = 11,1, p <0,001) de tal forma que superestima no plano frontal foram maiores para os movimentos através de 45 ° (7,9 ° , SE 2,6) do que através de 90 ° (2,8 °, SE 2,7), enquanto tal discrepância foi ausente para os outros aviões. Além disso, foi encontrada a modalidade significativamente interagir com ângulo (F (2,30) = 4,7, p = 0,017) de tal modo que subestima a partir de informação vestibular sozinho por movimentos através de 90 ° eram significativamente maiores (-4,3 °, SE 2,1) em comparação com o visual (-2,0 °, SE 2,4) e informação vestibular e visual combinadas (2,3 °, SE 2,2) condições, enquanto tais discrepâncias estavam ausentes para os movimentos através de 45 °. N significativa entre o efeito sujeitos foi de erro assinado (F (1,15) = 0,7, p = 0,432). Figura 5b mostra os resultados de tempo de resposta. Houve um efeito significativo demodalidade (F (2,28) = 22,6, p <0,001) onde os observadores mais lento respondeu ao responder com base no vestibular-cinestésica informações sozinho (11,0 s, SE 1,0) em comparação com o visual (9,3 s, SE 0,8) e combinado (9,0 S, Se 0,8) condições. Houve também um efeito significativo principal do plano (F (2,28) = 7,5, p = 0,002) onde os observadores mais lento reagiu quando movido no plano horizontal (10,4 S, Se 1,0) em comparação com o sagital (9,4 S, Se 0,8 ) e frontal (9,4 S, Se 0,9) aviões. Não houve efeito significativo do ângulo de segmento ou quaisquer interações. A significativa entre o efeito indivíduos foi encontrado para o tempo de resposta (F (1,14) = 129,1, p <0,001).

Figura 5. Resultados. um erro) Assinado em colapso modalidade para os aviões testados. b) O tempo de resposta caiu em aviões de movimento para as modalidadestestado. As barras de erro são + / - 1 SEM
Discussão
Integração caminho foi bem estabelecido como um meio usado para resolver onde um observador originado mas é propenso a subestima a de um ângulo moveu-se a 5. Os nossos resultados mostram este para o movimento de translação, mas apenas no plano horizontal. Nos planos verticais participantes são mais propensos a superestimar o ângulo transitado ou não têm preconceito em tudo. Estes resultados podem explicar por que as estimativas de elevação atravessou-em terrenos tendem a ser exagerados 10 e também por isso que a navegação espacial entre diferentes andares de um edifício é pobre 11. Estes resultados podem também estar relacionado com as assimetrias conhecidos na proporção relativa de sáculo para utricule receptores (~ 0,58) 12. Tempo de resposta mais lento com base em vestibular-cinestésica informações sozinho quando comparado ao que a informação visual está presente sugere que pode haver atrasos adicionais associados com a tentativa de determinar a origem de uma base em sugestões de inércia por si só, quepodem dizer respeito a estudos recentes que mostram que a percepção vestibular é lento em comparação aos outros sentidos 13-16. Em geral os nossos resultados sugerem que as estratégias alternativas para determinação da origem de um pode ser utilizado quando se deslocam verticalmente, que podem estar relacionados com o facto de que o movimento experiência seres humanos principalmente dentro de um plano horizontal. Além disso, enquanto traduções seqüenciais são raramente experimentado eles ocorrem com mais freqüência no plano sagital - onde os erros são mínimos - como quando caminhamos em direção e se mover em uma escada rolante. Enquanto experiência pós-entrevistas não refletem diferentes estratégias entre os aviões, os experimentos devem explorar essa possibilidade. Experimentos com trajetórias usando graus adicionais de liberdade, os caminhos mais longos, com o corpo de maneira diferente em relação orientada para a gravidade, bem como o uso de campos de visão maiores, que são agora possíveis com o Simulador CyberMotion MPI estão planejados para investigar o desempenho de integração caminho em três dimensões.
Divulgações
Não há conflitos de interesse declarados.
Agradecimentos
MPI pós-doutorado bolsas para MB-C e TM; coreano NRF (R31-2008-000-10008-0) para HHB. Graças a Karl Beykirch, Michael Kerger & Joachim Tesch de assistência técnica e discussão científica.
Materiais
KUKA KR 500 Heavy Duty Robô Industrial
KUKA KCP KUKA Painel de Controle
Dell 24 "1920x1200 LCD (campo efetivode vista mascarados para 1200 x 1200)
Joystick construído sob encomenda com UDP comunicação
Referências
- Loomis, J. M., Klatzky, R. L., Golledge, R. G. Navigating without vision: Basic and applied research. Optometry and Vision Science. 78, 282-289 (2001).
- Vidal, M., Amorim, M. A., Berthoz, A. Navigating in a virtual three-dimensional maze: how do egocentric and allocentric reference frames interact. Cognitive Brain Research. 19, 244-258 (2004).
- Vidal, M., Amorim, M. A., McIntyre, J., Berthoz, A. The perception of visually presented yaw and pitch turns: Assessing the contribution of motion, static, and cognitive cues. Perception & Psychophysics. 68, 1338-1350 (2006).
- Loomis, J. M., Klatzky, R. K., Philbeck, J. W., Golledge, R. Assessing auditory distance perception using perceptually directed action. Perception & Psychophysics. 60, 966-980 (1998).
- Loomis, J. M., Klatzky, R. L., Golledge, R. G., Cicinelli, J. G., Pellegrino, J. W., Fry, P. A. Nonvisual navigation by blind and sighted: Assessment of path integration ability. Journal of Experimental Psychology General. 122, 73-91 (1993).
- Bakker, N. H., Werkhoven, P. J., Passenier, P. O. The effects of proprioceptive and visual feedback on geographical orientation in virtual environments. Presence. 8, 36-53 (1999).
- Kearns, M. J., Warren, W. H., Duchon, A. P., Tarr, M. J. Path integration from optic flow and body senses in a homing task. Perception. 31, 349-374 (2002).
- Pollini, L., Innocenti, M., Petrone, A. Study of a novel motion platform for flight simulators using an anthropomorphic robot. , 2006-6360 (2006).
- Teufel, H. J., Nusseck, H. -. G., Beykirch, K. A., Butler, J. S., Kerger, M., Bulthoff, H. H. MPI motion simulator: development and analysis of a novel motion simulator. , 2007-6476 (2007).
- Gärling, T., Böök, A., Lindberg, E., Arce, C. Is elevation encoded in cognitive maps. Journal of Environmental Psychology. 10, 341-351 (1990).
- Montello, D. R., Pick, H. L. J. Integrating knowledge of vertically aligned large-scale spaces. Environment and Behaviour. 25, 457-483 (1993).
- Correia, M. J., Hixson, W. C., Niven, J. I. On predictive equations for subjective judgments of vertical and horizon in a force field. Acta oto-laryngologica Supplementum. 230, 3 (1968).
- Barnett-Cowan, M., Harris, L. R. Perceived timing of vestibular stimulation relative to touch, light and sound. Experimental Brain Research. 198, 221-231 (2009).
- Barnett-Cowan, M., Harris, L. R. Temporal processing of active and passive head movement. Experimental Brain Research. 214, 27-35 (2011).
- Sanders, M. C., Chang, N. N., Hiss, M. M., Uchanski, R. M., Hullar, T. E. Temporal binding of auditory and rotational stimuli. Experimental Brain Research. 210, 539-547 (2011).
- Barnett-Cowan, M., Raeder, S. M., Bulthoff, H. H. Persistent perceptual delay for head movement onset relative to auditory stimuli of different duration and rise times. Experimental Brain Research. , (2012).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados