
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
صور النظام الجوي غير المأهول على مستوى الأرض إلى جانب أخذ العينات المتوازنة مكانيا وتحسين المسار لمراقبة الغطاء النباتي للمراعي
In This Article
Summary
يستخدم البروتوكول المقدم في هذه الورقة تحسين المسار ، وأخذ عينات القبول المتوازن ، وصور نظام الطائرات غير المأهولة (UAS) على مستوى الأرض (UAS) لمراقبة الغطاء النباتي بكفاءة في النظم البيئية للمراعي. تتم مقارنة النتائج من الصور التي تم الحصول عليها من الطرق الأرضية والطرق بدون طيار.
Abstract
تغطي النظم البيئية للمراعي 3.6 مليار هكتار على مستوى العالم مع 239 مليون هكتار تقع في الولايات المتحدة. هذه النظم الإيكولوجية ضرورية للحفاظ على خدمات النظام البيئي العالمي. ومراقبة الغطاء النباتي في هذه النظم الإيكولوجية مطلوبة لتقييم صحة المراعي، وقياس مدى ملاءمة الموائل للحياة البرية والماشية الداجنة، ومكافحة الحشائش الغازية، وتوضيح التغيرات البيئية الزمنية. على الرغم من أن النظم الإيكولوجية للمراعي تغطي مساحات شاسعة ، إلا أن تقنيات الرصد التقليدية غالبا ما تستغرق وقتا طويلا وغير فعالة من حيث التكلفة ، وتخضع لتحيز كبير من المراقبين ، وغالبا ما تفتقر إلى المعلومات المكانية الكافية. وتكون مراقبة الغطاء النباتي المستندة إلى الصور أسرع، وتنتج سجلات دائمة (أي صور)، وقد تؤدي إلى تقليل تحيز المراقبين، وتتضمن بطبيعتها معلومات مكانية كافية. تعتبر تصميمات أخذ العينات المتوازنة مكانيا مفيدة في مراقبة الموارد الطبيعية. يتم تقديم بروتوكول لتنفيذ تصميم أخذ العينات المتوازن مكانيا يعرف باسم أخذ العينات القبول المتوازن (BAS) ، مع الصور المأخوذة من الكاميرات الأرضية والأنظمة الجوية غير المأهولة (UAS). يتم استخدام خوارزمية تحسين المسار بالإضافة إلى حل "مشكلة مندوب المبيعات المتجول" (TSP) لزيادة الوقت وكفاءة التكلفة. بينما يمكن الحصول على صور الطائرات بدون طيار أسرع بمقدار 2-3 مرات من الصور المحمولة باليد ، فإن كلا النوعين من الصور متشابهان مع بعضهما البعض من حيث الدقة والدقة. أخيرا ، تتم مناقشة إيجابيات وسلبيات كل طريقة وتقديم أمثلة على التطبيقات المحتملة لهذه الأساليب في النظم البيئية الأخرى.
Introduction
تشمل النظم البيئية للمراعي مساحات شاسعة ، تغطي 239 مليون هكتار في الولايات المتحدة و 3.6 مليار هكتار على مستوىالعالم 1. توفر المراعي مجموعة واسعة من خدمات النظام البيئي وتتضمن إدارة المراعي استخدامات متعددة للأراضي. في غرب الولايات المتحدة ، توفر المراعي موطنا للحياة البرية ، وتخزين المياه ، وعزل الكربون ، وأعلاف للماشيةالأليفة 2. تتعرض المراعي لاضطرابات مختلفة ، بما في ذلك الأنواع الغازية وحرائق الغابات وتطوير البنية التحتية واستخراج الموارد الطبيعية (مثل النفط والغاز والفحم)3. تعد مراقبة الغطاء النباتي أمرا بالغ الأهمية للحفاظ على إدارة الموارد داخل المراعي والنظم البيئية الأخرى في جميع أنحاء العالم4،5،6. غالبا ما تستخدم مراقبة الغطاء النباتي في المراعي لتقييم صحة المراعي ، وملاءمة الموائل لأنواع الحياة البرية ، وفهرسة التغييرات في المناظر الطبيعية بسبب الأنواع الغازية وحرائق الغابات واستخراج الموارد الطبيعية7،8،9،10. في حين أن أهداف برامج المراقبة المحددة قد تختلف ، فإن برامج المراقبة التي تناسب احتياجات أصحاب المصلحة المتعددين مع كونها موثوقة إحصائيا وقابلة للتكرار واقتصادية مطلوبة5،7،11. على الرغم من أن مديري الأراضي يدركون أهمية المراقبة ، إلا أنه غالبا ما ينظر إليها على أنها غير علمية وغير اقتصادية ومرهقة5.
تقليديا ، تم إجراء مراقبة المراعي بمجموعة متنوعة من الطرق بما في ذلك التقدير العيني أو البصري10 ، وإطارات Daubenmire12 ، ومخططات المؤامرة13 ، واعتراض نقطة الخط على طول مقاطع الغطاء النباتي14. في حين أن تقدير العين أو البصر فعال من حيث الوقت ، إلا أنه يخضع لتحيز المراقبالعالي 15. وغالبا ما تكون الطرق التقليدية الأخرى، على الرغم من أنها تخضع أيضا لتحيز كبير من المراقبين، غير فعالة بسبب متطلباتها من الوقتوالتكلفة 6،15،16،17. غالبا ما يكون الوقت اللازم لتنفيذ العديد من هذه الطرق التقليدية مرهقا للغاية ، مما يجعل من الصعب الحصول على أحجام عينات صحيحة إحصائيا ، مما يؤدي إلى تقديرات سكانية غير موثوقة. غالبا ما يتم تطبيق هذه الأساليب على أساس الراحة وليس على أساس عشوائي ، حيث يختار المراقبون المكان الذي يجمعون فيه البيانات. بالإضافة إلى ذلك ، تختلف مواقع العينات المبلغ عنها والفعلية في كثير من الأحيان ، مما يتسبب في ارتباك مديري الأراضي وأصحاب المصلحة الآخرين الذين يعتمدون على بيانات مراقبة الغطاءالنباتي 18. أظهرت الأبحاث الحديثة أن مراقبة الغطاء النباتي المستندة إلى الصور فعالة من حيث الوقت والتكلفة6،19،20. ومن شأن زيادة كمية البيانات التي يمكن أخذ عينات منها في منطقة معينة في فترة زمنية قصيرة أن تحسن الموثوقية الإحصائية للبيانات مقارنة بالتقنيات التقليدية التي تستغرق وقتا طويلا. الصور هي سجلات دائمة يمكن تحليلها بواسطة العديد من المراقبين بعد جمع البياناتالميدانية 6. بالإضافة إلى ذلك, تم تجهيز العديد من الكاميرات بأنظمة تحديد المواقع العالمية (GPS), بحيث يمكن وضع علامات جغرافية على الصور مع موقع تجميع18,20. ومن شأن استخدام نقاط أخذ العينات التي تم إنشاؤها بواسطة الحاسوب، والموجودة بدقة في الميدان، أن يقلل من تحيز المراقب سواء تم الحصول على الصورة بكاميرا محمولة باليد أو بواسطة نظام جوي غير مأهول لأنه يقلل من ميل المراقب الفردي إلى استخدام رأيه في المكان الذي ينبغي أن توضع فيه مواقع العينات.
بصرف النظر عن كونها تستغرق وقتا طويلا ومكلفة وتخضع لتحيز كبير من المراقبين ، غالبا ما تفشل المراقبة التقليدية للموارد الطبيعية في توصيف المراعي غير المتجانسة بشكل كاف بسبب انخفاض حجم العينة ومواقع أخذ العيناتالمركزة 21. توزع تصميمات أخذ العينات المتوازنة مكانيا مواقع العينات بشكل متساو عبر منطقة الاهتمام لتوصيف الموارد الطبيعيةبشكل أفضل 21،22،23،24. يمكن أن تقلل هذه التصاميم من تكاليف أخذ العينات ، لأن أحجام العينات الأصغر مطلوبة لتحقيق الدقة الإحصائية بالنسبة لأخذ العينات العشوائيةالبسيطة 25.
في هذه الطريقة ، يتم دمج تصميم أخذ العينات المتوازن مكانيا المعروف باسم أخذ العينات القبول المتوازن (BAS) 22،24 مع المراقبة القائمة على الصور لتقييم الغطاء النباتي للمراعي. تنتشر نقاط BAS على النحو الأمثل على منطقة الاهتمام26. ومع ذلك ، هذا لا يضمن أنه سيتم ترتيب النقاط في المسار الأمثل للزيارة20. لذلك ، يتم ترتيب نقاط BAS باستخدام خوارزمية تحسين المسار التي تحل مشكلة مندوب المبيعات المتجول (TSP) 27. تحدد زيارة النقاط بهذا الترتيب المسار الأمثل (أي أقل مسافة) يربط النقاط. يتم نقل نقاط BAS إلى برنامج نظام المعلومات الجغرافية (GIS) ثم إلى وحدة جمع البيانات المحمولة المجهزة بنظام تحديد المواقع العالمي (GPS). بعد تحديد موقع نقاط BAS ، يتم التقاط الصور بكاميرا مجهزة بنظام تحديد المواقع العالمي (GPS) بالإضافة إلى نظام جوي بدون طيار يعمل باستخدام برنامج الطيران. عند دخول الميدان ، يمشي فني إلى كل نقطة للحصول على صور كاميرا مثبتة على حامل أحادي بحجم 1 م2 مع مسافة عينة أرضية تبلغ 0.3 مم (GSD) في كل نقطة BAS بينما تطير الطائرات بدون طيار إلى نفس النقاط وتكتسب صور GSD مقاس 2.4 مم. بعد ذلك ، يتم إنشاء بيانات الغطاء النباتي باستخدام "SamplePoint" 28 لتصنيف 36 نقطة / صورة يدويا. تتم مقارنة بيانات الغطاء النباتي الناتجة عن تحليل صور مستوى الأرض والطائرات بدون طيار بالإضافة إلى أوقات الاستحواذ المبلغ عنها لكل طريقة. في الدراسة التمثيلية ، تم استخدام قطعتين متجاورتين من المراعي مساحتها 10 أفدنة. أخيرا ، تتم مناقشة التطبيقات الأخرى لهذه الطريقة وكيفية تعديلها للمشاريع أو المشاريع المستقبلية في النظم البيئية الأخرى.
Access restricted. Please log in or start a trial to view this content.
Protocol
1. تحديد مجال الدراسة ، وإنشاء نقاط العينة ومسار السفر ، والإعداد الميداني
- تعريف مجال الدراسة
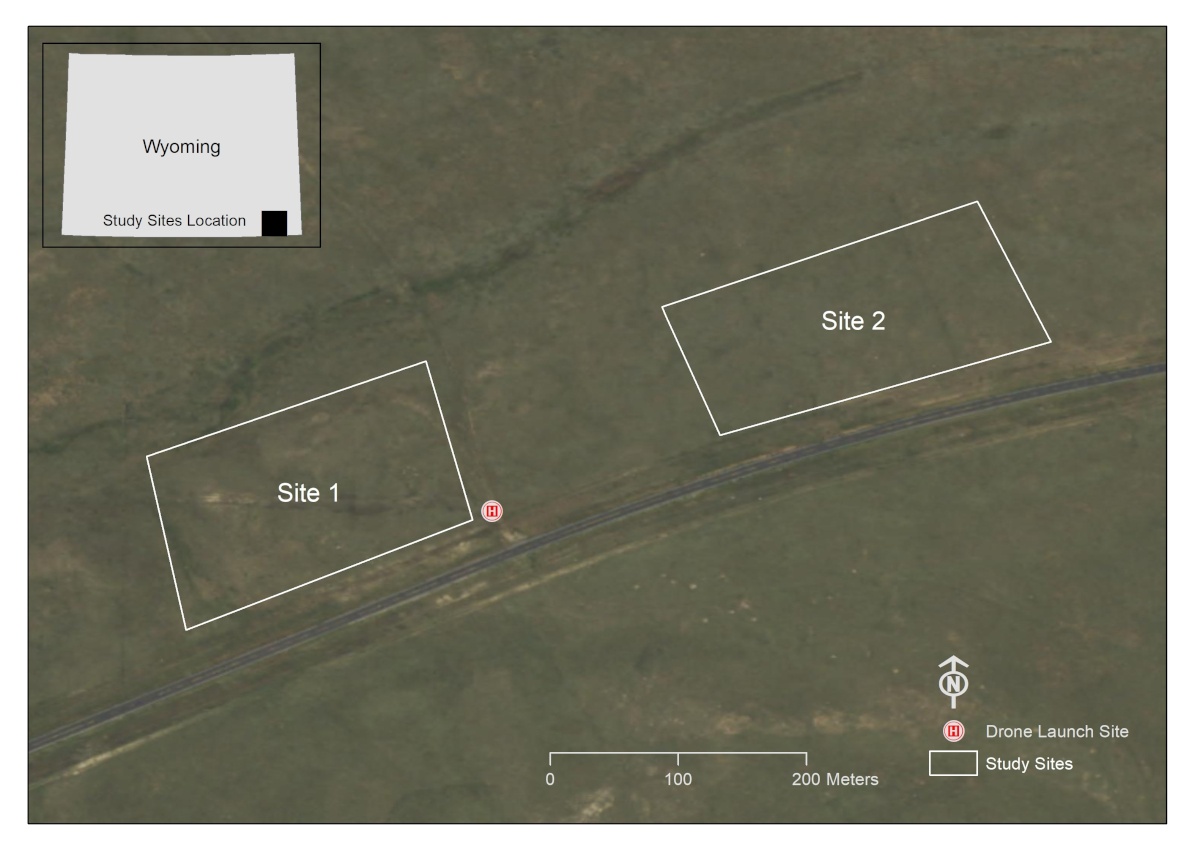
- استخدم برنامج نظم المعلومات الجغرافية لرسم رسم مضلع (رسومات) حول المنطقة (المناطق) محل الاهتمام. أجريت هذه الدراسة على قطعتين مساحتهما 10 أفدنة داخل مخصص للرعي في مقاطعة لارامي ، ويسكونسن ، الولايات المتحدة الأمريكية (الشكل 1).
- تأكد من استبعاد تلك المناطق التي لا يقصد بها أن تكون ضمن إطار العينة من المضلع (على سبيل المثال ، المسطحات المائية ، وهياكل المباني ، والطرق ، وما إلى ذلك). سيضمن ذلك عدم التقاط صور لهذه المناطق لاحقا.
- قم بتحويل رسم المضلع إلى ميزة ملف الشكل (.shp) في برنامج GIS وتأكد من إنشاء ملف الشكل في نظام الإحداثيات المطلوب.

الشكل 1: تصوير لمجالات اهتمام الدراسة. يقع هذا الموقع في منطقة رعي جنوب شايان في مقاطعة لارامي ، ويسكونسن ، الولايات المتحدة الأمريكية (مصدر الصور: Wyoming NAIP Imagery 2017). الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- إنشاء نقاط BAS وتحسين مسار السفر
ملاحظة: يتم إرفاق الرمز ك "Supplemental_Code.docx".- استخدم حزمة R 'rgdal'29 لتحويل مضلع GIS إلى ملف قابل للقراءة في برنامج R.
- استخدم حزمة R "SDraw"30 لإنشاء العدد المطلوب من نقاط BAS. استخدمت هذه الدراسة 30 نقطة BAS لكل منطقة دراسة ، على الرغم من أنه يجب إجراء بحث مستقبلي لتحديد كثافة أخذ العينات المثلى للمناطق ذات الأحجام المختلفة وتكوين الغطاء النباتي.
- استخدم حزمة R "TSP'27 " لطلب نقاط BAS. تؤدي زيارة النقاط في هذا الترتيب إلى تقليل الوقت اللازم للحصول على عينات في نقاط BAS.
- التحضير للحصول على الصور المحمولة باليد
- استخدم حزمة R 'rgdal' لتحويل النقاط من الخطوة 1.2.1 مرة أخرى إلى برنامج GIS.
- قم بتحرير جدول السمات الخاص بملف الشكل بحيث يعكس حقل معرف النقطة ترتيب المسار المحسن بدقة.
- نقل مضلع GIS والملف النقطي إلى برنامج GIS الذي يعمل على وحدة محمولة.
- تأكد من وجود نظام الإحداثيات المتوقع الصحيح لمنطقة الاهتمام.
- التحضير للحصول على صور الطائرات بدون طيار
- استخدم حزمة R 'rgdal' لنقل النقاط من الخطوة 1.2.1 مرة أخرى إلى برنامج GIS.
- في برنامج GIS، استخدم أداة إضافة إحداثيات XY لإنشاء حقول خطوط الطول والعرض وتعبئتها في جدول سمات نقطة الطريق.
- قم بتصدير جدول سمات نقطة الطريق الذي يحتوي على أعمدة خطوط العرض وخط الطول وTSP إلى تنسيق ملف *.csv.
- افتح ملف *.csv في حزمة برامج مناسبة.
- فرز نقاط الطريق حسب معرف TSP.
- افتح تطبيق Mission Hub.
- قم بإنشاء نقطة طريق عشوائية في Mission Hub.
- تصدير إحداثيات عشوائية كملف *.csv.
- افتح ملف *.csv في برنامج جداول بيانات واحذف عناوين الأعمدة التعسفية التي تحافظ على نقاط الإحداثية.
- انسخ أزواج إحداثيات نقاط الطريق التي تم فرزها بواسطة TSP من الخطوة 1.2.3 إلى الأعمدة ذات الصلة في ملف *.csv من الخطوة 1.4.8.
- قم باستيراد ملف *.csv من الخطوة 1.4.10 إلى Mission Hub كمهمة جديدة.
- حدد الإعدادات.
- حدد المربع استخدام الارتفاع عبر الإنترنت.
- حدد وضع المسار كخطوط مستقيمة.
- حدد إجراء الإنهاء ك RTH لتمكين الطائرة بدون طيار من العودة إلى المنزل بعد اكتمال المهمة.
- انقر فوق نقاط الطريق الفردية وإضافة الإجراءات عن طريق تحديد المعلمات التالية: البقاء: 2 ثانية (لتجنب ضبابية الصورة) ؛ الكاميرا القابلة للإمالة: -90 درجة (الحضيض) ؛ التقط صورة.
- احفظ المهمة باسم مناسب.
- كرر العملية لمواقع إضافية.
2. جمع البيانات الميدانية والمعالجة اللاحقة
- تسجيل الغطاء النباتي المرصود أو المتوقع في منطقة الدراسة
- قبل الحصول على الصور ، قم بإنشاء قائمة بالنباتات التي لوحظت داخل منطقة الدراسة. يمكن القيام بذلك على ورقة مكتوبة بخط اليد أو على نموذج رقمي للمساعدة في التعرف على الصورة لاحقا. قد يكون من المفيد إدراج الأنواع التي من المحتمل أن تكون متوقعة في المنطقة في الجرد حتى لو لم يتم ملاحظتها في الحقل (على سبيل المثال ، الأنواع داخل خلطات بذور الاستصلاح)18.
- الحصول على الصور الأرضية
- قم بتوصيل كاميرا بحامل أحادي عمودي ووجه الكاميرا لأسفل بزاوية 60 درجة تقريبا. يمكن تحديد مساحة الصورة باستخدام مواصفات العدسة والدقة (ميجابكسل) للكاميرا وضبط monopod على ارتفاع قياسي. سيحدد ارتفاع monopod إلى جانب مواصفات الكاميرا مسافة العينة الأرضية (GSD). في هذه الدراسة ، تم استخدام كاميرا بدقة 12.1 ميجابكسل وتم ضبط monopod على ارتفاع ثابت 1.3 متر فوق سطح الأرض للحصول على صور Nadir عند ~ 0.3 مم GSD18.
- قم بإمالة الحامل الأحادي للأمام بحيث تكون عدسة الكاميرا في وضع الحضيض، ولا يمكن عرض الحامل الأحادي بزاوية في الصورة.
- اضبط ارتفاع الحامل الأحادي أو التكبير/التصغير على العدسة لتحقيق حجم مخطط بدون إطار يبلغ 1 م2 (أو حجم مخطط آخر مرغوب فيه). بالنسبة للكاميرات الأكثر شيوعا بنسبة العرض إلى الارتفاع 4: 3 ، ينتج عن عرض المخطط البالغ 115 سم مجال رؤية للصورة 1 م2 . ليست هناك حاجة لوضع إطار على الأرض ؛ الصورة بأكملها هي الحبكة. إذا قمت بضبط التكبير/التصغير على العدسة لتحقيق ذلك، فاستخدم شريط الرسام لمنع التغييرات العرضية في إعداد التكبير/التصغير.
- إذا أمكن ، اضبط الكاميرا على وضع أولوية الغالق واضبط سرعة الغالق على 1/125 ثانية على الأقل لتجنب الضبابية في الصورة. أسرع إذا كان الجو عاصفا.
- حدد موقع النقطة الأولى في ترتيب المسار المحسن.
- ضع monopod على الأرض عند النقطة 1 وقم بإمالة monopod حتى تصبح الكاميرا في اتجاه الحضيض. تأكد من عدم وجود ظل المشغل في الصورة. أمسك الكاميرا بثبات لمنع ضبابية الحركة. احصل على الصورة.
ملاحظة: يعد كبل التشغيل عن بعد مفيدا لهذه الخطوة. - تحقق من جودة الصورة لضمان التقاط البيانات بنجاح.
- انتقل إلى النقطة التالية في ترتيب المسار المحسن وكرر خطوات الاكتساب.
- الحصول على صور الطائرات بدون طيار
- قبل إطلاق الطائرات بدون طيار ، قم بإجراء استطلاع موجز لمنطقة الدراسة للتأكد من عدم وجود عوائق مادية داخل مسار الرحلة. يعد تمرين الاستطلاع هذا مفيدا أيضا لتحديد منطقة مسطحة إلى حد ما يمكن من خلالها إطلاق الطائرات بدون طيار.
- تأكد من أن الظروف الجوية مناسبة للطيران في الطائرات بدون طيار: يوم جاف وصاف (رؤية >4.8 كم) مع إضاءة كافية ، وأقل رياح (<17 عقدة) ، ودرجات حرارة تتراوح بين 0 درجة مئوية - 37 درجة مئوية.
- اتبع البروتوكولات القانونية. على سبيل المثال ، في الولايات المتحدة الأمريكية ، يجب اتباع سياسات إدارة الطيران الفيدرالية.
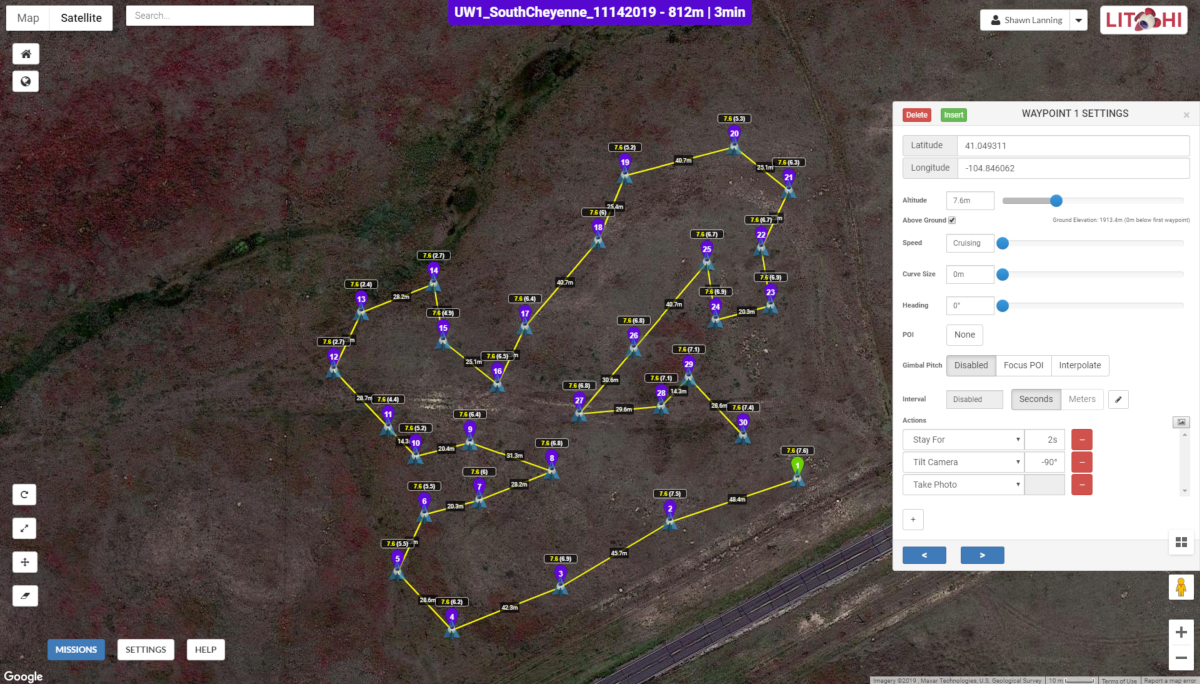
- استخدم برنامج Mission Hub (الشكل 2) وتطبيق تنفيذ المهمة الذي يمكن الوصول إليه عبر الأجهزة المحمولة (الشكل 3).
- اجمع صور UAS في كل نقطة BAS كما هو موضح في الخطوة 1.4.
- تحقق من أن جميع الصور قد تم الحصول عليها باستخدام الجهاز المحمول قبل تغيير المواقع.

الشكل 2: واجهة المستخدم الخاصة ب Mission Hub. تصور الخريطة مسار رحلة الطائرة بدون طيار على طول سلسلة من 30 نقطة BAS عبر أحد مواقع الدراسة بينما تعرض النافذة المنبثقة معلمات الحصول على الصور في كل نقطة طريق. الشكل 2 خاص بالموقع 1 ، على الرغم من أنه مشابه في المظهر للموقع 2. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}

الشكل 3: مهمة رحلة نقطة الطريق في تطبيق تنفيذ مهمة Litchi الذي يعمل على هاتف ذكي يعمل بنظام Android. تظهر معرفات نقاط الطريق الفريدة باللون الأرجواني وتمثل الترتيب النسبي الذي تم به التقاط الصور في نقاط مختلفة في منطقة الدراسة. تشير الأرقام الموجودة في كل نقطة طريق، مثل 7(6)، إلى القيم الصحيحة للارتفاعات فوق سطح الأرض التي التقطت فيها الصور (الرقم الأول) والارتفاعات فوق النقطة الرئيسية أو موقع إطلاق الطائرات بدون طيار (الرقم الثاني). لاحظ المسافات بين نقاط الطريق المتتالية الموضحة على الخريطة. الشكل 3 خاص بالموقع 1 ، على الرغم من أنه مشابه في المظهر للموقع 2. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- المعالجة اللاحقة للصور على مستوى الأرض.
ملاحظة: الاتجاهات متوفرة في www.SamplePoint.org في قسم البرنامج التعليمي. مرفق ملف .pdf تكميلي.- قم بتنزيل الصور على جهاز كمبيوتر باستخدام كابل USB أو بطاقة SD.
- تأكد من التقاط الصور في المواقع الصحيحة. توجد برامج مختلفة لوضع الصور في برنامج نظم المعلومات الجغرافية بناء على البيانات الوصفية داخل الصور ذات العلامات الجغرافية.
- إذا تم الحصول على الصور في مناطق دراسة متعددة ، فقم بتخزينها في مجلدات منفصلة لتحليل الصور.
- المعالجة اللاحقة للصور UAS
- نقل الصور المحفوظة على بطاقة microSD قابلة للإزالة من UAS إلى الكمبيوتر.
- كرر الخطوتين 2.4.2 و 2.4.3.
3. تحليل الصور
ملاحظة: يمكن العثور على جميع الخطوات في قسم "البرنامج التعليمي" في www.SamplePoint.org ؛ مرفق ملف "tutorial.pdf" تكميلي.
- في SamplePoint، انقر فوق خيارات | معالج قاعدة البيانات | إنشاء / ملء قاعدة البيانات.
- قم بتسمية قاعدة البيانات بناء على منطقة الدراسة.
- انتقل إلى المجلد الذي يحتوي على عينات منطقة الدراسة المطلوبة وحدد تلك المراد تصنيفها.
- انقر فوق تم.
- انقر فوق الخيارات | حدد قاعدة البيانات وحدد ملف * .xls الذي ينشئه SamplePoint بناء على تحديد الصورة (سيكون هذا في الصورة).
- تأكد من تحديد العدد الصحيح للصور في قاعدة البيانات عندما يطلب منك SamplePoint.
- حدد العدد المطلوب من وحدات البكسل المراد تحليلها داخل كل صورة. يمكن القيام بذلك في نمط شبكي أو عشوائيا. استخدمت هذه الدراسة شبكة 6 × 6 لتحديد ما مجموعه 36 بكسل ، على الرغم من أنه يمكن تصنيف وحدات بكسل أكثر أو أقل لكل صورة اعتمادا على دقة القياس المطلوبة للتصنيف. وجدت دراسة حديثة أن 20-30 بكسل لكل صورة كافية لأخذ عينات من المساحاتالكبيرة 31. يضمن خيار الشبكة أن وحدات البكسل ستكون في نفس الموضع إذا تمت إعادة تحليل الصورة ، بينما سيقوم الخيار العشوائي بإنشاء وحدات بكسل بشكل عشوائي في كل مرة يتم فيها إعادة تحميل الصورة.
- قم بإنشاء ملف زر مخصص لتصنيف الأنواع. يمكن إنشاء هذه القائمة من قائمة الغطاء النباتي المسجلة في الحقل قبل الحصول على الصور ، أو يمكن أن تستند إلى معلومات أخرى ذات صلة بمنطقة الدراسة (على سبيل المثال ، قائمة مزيج البذور في المواقع المستصلحة ، أو معلومات وصف الموقع البيئي ، إلخ). تأكد من إنشاء زر للأرض العارية أو التربة وغيرها من العناصر غير النباتية المحتملة التي قد تتم مواجهتها، مثل القمامة أو الصخور. يوصى بإنشاء زر غير معروف للسماح للمحلل بتصنيف الأنواع في وقت لاحق. يمكن استخدام مربع التعليق في SamplePoint لتدوين وحدات البكسل التي استخدمت هذا الخيار. بالإضافة إلى ذلك ، إذا لم تكن دقة الصورة عالية بما يكفي للتصنيف إلى مستويات الأنواع ، فإن إنشاء أزرار للمجموعات الوظيفية (على سبيل المثال ، Grass و Forb و Shrub) مفيد.
- ابدأ في تحليل الصور بالنقر فوق زر التصنيف الذي يصف بكسل الصورة الذي يستهدفه علامة التصويب الحمراء. كرر هذا حتى يطالب SamplePoint "هذه هي كل النقاط. انقر على الصورة التالية." كرر هذا لجميع الصور داخل قاعدة البيانات.
ملاحظة: يمكن استخدام ميزة التكبير/التصغير للمساعدة في التصنيف. - عندما يتم تحليل جميع الصور الموجودة في قاعدة البيانات بالكامل ، سيطالب SamplePoint "لقد استنفدت جميع الصور". في هذه المرحلة، حدد موافق ثم انقر فوق خيارات | إنشاء ملفات إحصائية.
- انتقل إلى المجلد الذي يحتوي على قاعدة البيانات وافتح ملف * .csv الذي تم إنشاؤه للتو للتأكد من تخزين البيانات الخاصة بجميع الصور.
4. التحليل الإحصائي
- تحليلات مربع كاي لتحديد الاختلافات بين المواقع
- نظرا لأن نفس العدد من الصور (وحدات أخذ العينات الأولية) والبكسل (وحدات أخذ العينات الثانوية) يتم جمعها وتحليلها في كلا الموقعين ، يمكن اعتبار المقارنة بين الموقعين نتاجا للتصميم متعدد الحدود.
- باستخدام ملف *.csv الذي تم إنشاؤه في الخطوة 3.11، احسب مجموع النقاط المصنفة لكل فئة تصنيف.
- قم بإجراء تحليل مربع كاي على مبالغ النقاط. إذا كان الموقع 1 والموقع 2 متشابهين مع بعضهما البعض، فسيظهر عدد متساو تقريبا من وحدات البكسل المصنفة على أنه كل نوع غلاف على كلاالموقعين 18.
- الانحدار لمقارنة الطائرات بدون طيار مقابل الصور على مستوى الأرض
- باستخدام ملفات *.csv التي تم إنشاؤها في الخطوة 3.11، انسخ والصق متوسط النسبة المئوية للغلاف من كل صورة وقم بمحاذاة بيانات صورة UAS مع بيانات الصورة من مستوى الأرض.
- إجراء تحليل الانحدار في برنامج قاعدة بيانات.
Access restricted. Please log in or start a trial to view this content.
النتائج
استغرق الحصول على صور الطائرات بدون طيار أقل من نصف وقت جمع الصور الأرضية ، بينما كان وقت التحليل أقل قليلا مع الصور الأرضية (الجدول 1). كانت الصور الأرضية عالية الدقة ، وهذا على الأرجح سبب تحليلها في وقت أقل. من المحتمل أن تكون الاختلافات في أوقات مسار المشي بين ا...
Access restricted. Please log in or start a trial to view this content.
Discussion
لطالما تم الاعتراف بأهمية مراقبة المواردالطبيعية 14. ومع زيادة الاهتمام بالقضايا البيئية العالمية، تزداد أهمية تطوير تقنيات رصد موثوقة تتسم بالفعالية من حيث الوقت والتكلفة. أظهرت العديد من الدراسات السابقة أن تحليل الصور يقارن بشكل إيجابي بتقنيات مراقبة ا...
Access restricted. Please log in or start a trial to view this content.
Disclosures
ويعلن أصحاب البلاغ عدم وجود تضارب في المصالح. كانت البرمجيات المستخدمة في هذه الدراسة متاحة للمؤلفين إما كمصدر مفتوح أو من خلال تصاريح مؤسسية. لا يتم رعاية أي مؤلفين من قبل أي برنامج مستخدم في هذه الدراسة ويقرون بتوفر برامج أخرى قادرة على إجراء أبحاث مماثلة.
Acknowledgements
تم تمويل هذا البحث في الغالب من قبل مركز وايومنغ للاستصلاح والترميم و Jonah Energy، LLC. نشكر Warren Resources و Escelara Resources على تمويل وحدة Trimble Juno 5. نشكر Jonah Energy، LLC على الدعم المستمر لتمويل مراقبة الغطاء النباتي في وايومنغ. نشكر مركز وايومنغ لعلوم المعلومات الجغرافية على توفير معدات الطائرات بدون طيار المستخدمة في هذه الدراسة.
Access restricted. Please log in or start a trial to view this content.
Materials
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
References
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , CRC Press. Boca Raton, FL. 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , Aitkenvale, Queensland, Australia. (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , Denver, CO, USA. (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524(2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- Hahsler, M., Hornik, K. TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7. , Available from: https://CRAN.R-project.org/package=TSP (2019).
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- Bivand, R., Keitt, T., Rowlingson, B. rgdal: bindings for geospatial data abstraction library. R package version 1.2-7. , Available from: https://CRAN.R-project.org/package=rgdal (2017).
- McDonald, T. SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3. , Available from: https://CRAN.R-project.org/package=SDraw (2016).
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049(2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041(2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Access restricted. Please log in or start a trial to view this content.
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved