
Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Imágenes de sistemas aéreos no tripulados a nivel del suelo junto con muestreo espacialmente equilibrado y optimización de rutas para monitorear la vegetación de pastizales
En este artículo
Resumen
El protocolo presentado en este documento utiliza la optimización de rutas, el muestreo de aceptación equilibrada y las imágenes del sistema de aeronaves no tripuladas (UAS) y a nivel del suelo para monitorear de manera eficiente la vegetación en los ecosistemas de pastizales. Se comparan los resultados de las imágenes obtenidas a nivel del suelo y con los métodos UAS.
Resumen
Los ecosistemas de pastizales cubren 3.6 mil millones de hectáreas en todo el mundo, con 239 millones de hectáreas ubicadas en los Estados Unidos. Estos ecosistemas son fundamentales para mantener los servicios ecosistémicos mundiales. El monitoreo de la vegetación en estos ecosistemas es necesario para evaluar la salud de los pastizales, para medir la idoneidad del hábitat para la vida silvestre y el ganado doméstico, para combatir las malezas invasoras y para dilucidar los cambios ambientales temporales. Aunque los ecosistemas de pastizales cubren vastas áreas, las técnicas tradicionales de monitoreo suelen llevar mucho tiempo y ser ineficientes en función de los costos, están sujetas a un alto sesgo del observador y a menudo carecen de información espacial adecuada. El monitoreo de la vegetación basado en imágenes es más rápido, produce registros permanentes (es decir, imágenes), puede resultar en un menor sesgo del observador e inherentemente incluye información espacial adecuada. Los diseños de muestreo espacialmente equilibrados son beneficiosos para el monitoreo de los recursos naturales. Se presenta un protocolo para implementar un diseño de muestreo espacialmente equilibrado conocido como muestreo de aceptación equilibrada (BAS), con imágenes adquiridas de cámaras a nivel del suelo y sistemas aéreos no tripulados (UAS). Además de utilizar un algoritmo de optimización de rutas, se utiliza para resolver el "problema del vendedor viajero" (TSP) para aumentar la eficiencia en tiempo y costes. Si bien las imágenes de UAS se pueden adquirir de 2 a 3 veces más rápido que las imágenes de mano, ambos tipos de imágenes son similares entre sí en términos de exactitud y precisión. Por último, se discuten los pros y los contras de cada método y se proporcionan ejemplos de posibles aplicaciones de estos métodos en otros ecosistemas.
Introducción
Los ecosistemas de pastizales abarcan vastas áreas, cubriendo 239 millones de hectáreas en los Estados Unidos y 3.6 mil millones de hectáreas en todo el mundo. Los pastizales proporcionan una amplia gama de servicios ecosistémicos y la gestión de los pastizales implica múltiples usos de la tierra. En el oeste de los EE. UU., los pastizales proporcionan hábitat para la vida silvestre, almacenamiento de agua, secuestro de carbono y forraje para el ganado doméstico2. Los pastizales están sujetos a diversas perturbaciones, como especies invasoras, incendios forestales, desarrollo de infraestructuras y extracción de recursos naturales (por ejemplo, petróleo, gas y carbón)3. El monitoreo de la vegetación es fundamental para mantener la gestión de los recursos dentro de los pastizales y otros ecosistemas en todo el mundo 4,5,6. El monitoreo de la vegetación en los pastizales se utiliza a menudo para evaluar la salud de los pastizales, la idoneidad del hábitat para las especies de vida silvestre y para catalogar los cambios en los paisajes debidos a especies invasoras, incendios forestales y extracción de recursos naturales 7,8,9,10. Si bien los objetivos de los programas de monitoreo específicos pueden variar, es deseable que los programas de monitoreo se ajusten a las necesidades de múltiples partes interesadas y, al mismo tiempo, sean estadísticamente confiables, repetibles y económicos 5,7,11. Aunque los administradores de tierras reconocen la importancia del monitoreo, a menudo se considera que no es científico, antieconómico y oneroso5.
Tradicionalmente, el monitoreo de pastizales se ha llevado a cabo con una variedad de métodos, incluyendo la estimación ocular o visual10, los marcos de Daubenmire12, el trazado de parcelas13 y la intercepción de puntos de línea a lo largo de los transectos de vegetación14. Si bien la estimación ocular o visual es eficiente en el tiempo, está sujeta a un alto sesgo del observador15. Otros métodos tradicionales, aunque también están sujetos a un alto sesgo del observador, a menudo son ineficientes debido a sus requisitos de tiempo y costo 6,15,16,17. El tiempo requerido para implementar muchos de estos métodos tradicionales es a menudo demasiado oneroso, lo que dificulta la obtención de tamaños de muestra estadísticamente válidos, lo que resulta en estimaciones de población poco confiables. Estos métodos a menudo se aplican en función de la conveniencia en lugar de estocásticamente, y los observadores eligen dónde recopilar los datos. Además, las ubicaciones de las muestras notificadas y reales difieren con frecuencia, lo que causa confusión para los administradores de tierras y otras partes interesadas que dependen de los datos de monitoreo de la vegetación18. Investigaciones recientes han demostrado que el monitoreo de la vegetación basado en imágenes es efectivo en tiempo y costo 6,19,20. Aumentar la cantidad de datos que se pueden muestrear dentro de un área determinada en un corto período de tiempo debería mejorar la confiabilidad estadística de los datos en comparación con las técnicas tradicionales que requieren más tiempo. Las imágenes son registros permanentes que pueden ser analizados por múltiples observadores después de que se recopilan los datos de campo6. Además, muchas cámaras están equipadas con sistemas de posicionamiento global (GPS), por lo que las imágenes se pueden geoetiquetar con una ubicación de recolección18,20. El uso de puntos de muestreo generados por computadora, ubicados con precisión en el campo, debería reducir el sesgo del observador, ya sea que la imagen se adquiera con una cámara de mano o con un sistema aéreo no tripulado, ya que reduce la inclinación de un observador individual a usar su opinión sobre dónde se deben colocar las ubicaciones de las muestras.
Además de llevar mucho tiempo, ser costoso y estar sujeto a un alto sesgo del observador, el monitoreo tradicional de los recursos naturales con frecuencia no logra caracterizar adecuadamente los pastizales heterogéneos debido al bajo tamaño de la muestra y a la concentración de los lugares de muestreo21. Los diseños de muestreo espacialmente equilibrados distribuyen las ubicaciones de las muestras de manera más uniforme en un área de interés para caracterizar mejor los recursos naturales 21,22,23,24. Estos diseños pueden reducir los costos de muestreo, ya que se requieren tamaños de muestra más pequeños para lograr la precisión estadística en relación con el muestreo aleatorio simple25.
En este método, se combina un diseño de muestreo espacialmente balanceado conocido como muestreo de aceptación balanceado (BAS)22,24 con monitoreo basado en imágenes para evaluar la vegetación de los pastizales. Los puntos BAS se distribuyen de forma óptima en el área de interés26. Sin embargo, esto no garantiza que los puntos se ordenarán en una ruta óptima para la visitación20. Por lo tanto, los puntos BAS se organizan utilizando un algoritmo de optimización de rutas que resuelve el problema del vendedor viajero (TSP)27. Visitar los puntos en este orden determina un camino óptimo (es decir, la menor distancia) que conecta los puntos. Los puntos BAS se transfieren a un programa informático de sistema de información geográfica (SIG) y luego a una unidad portátil de recopilación de datos equipada con GPS. Una vez localizados los puntos BAS, las imágenes se toman con una cámara equipada con GPS, así como con un sistema aéreo no tripulado operado mediante software de vuelo. Al entrar en el campo, un técnico camina a cada punto para adquirir imágenes de cámara montadas en monopié de 1 m2 con una distancia de muestreo del suelo (GSD) de 0,3 mm en cada punto BAS, mientras que un UAS vuela a los mismos puntos y adquiere imágenes GSD de 2,4 mm. Posteriormente, se generan datos de cobertura vegetal utilizando 'SamplePoint'28 para clasificar manualmente 36 puntos/imagen. Se comparan los datos de cobertura vegetal generados a partir del análisis de imágenes a nivel del suelo y UAS, así como los tiempos de adquisición informados para cada método. En el estudio representativo, se utilizaron dos parcelas de pastizales adyacentes de 10 acres. Finalmente, se discuten otras aplicaciones de este método y cómo puede ser modificado para futuros proyectos o proyectos en otros ecosistemas.
Protocolo
1. Definición del área de estudio, generación de puntos de muestreo y ruta de viaje, y preparación del campo
- Definición del área de estudio
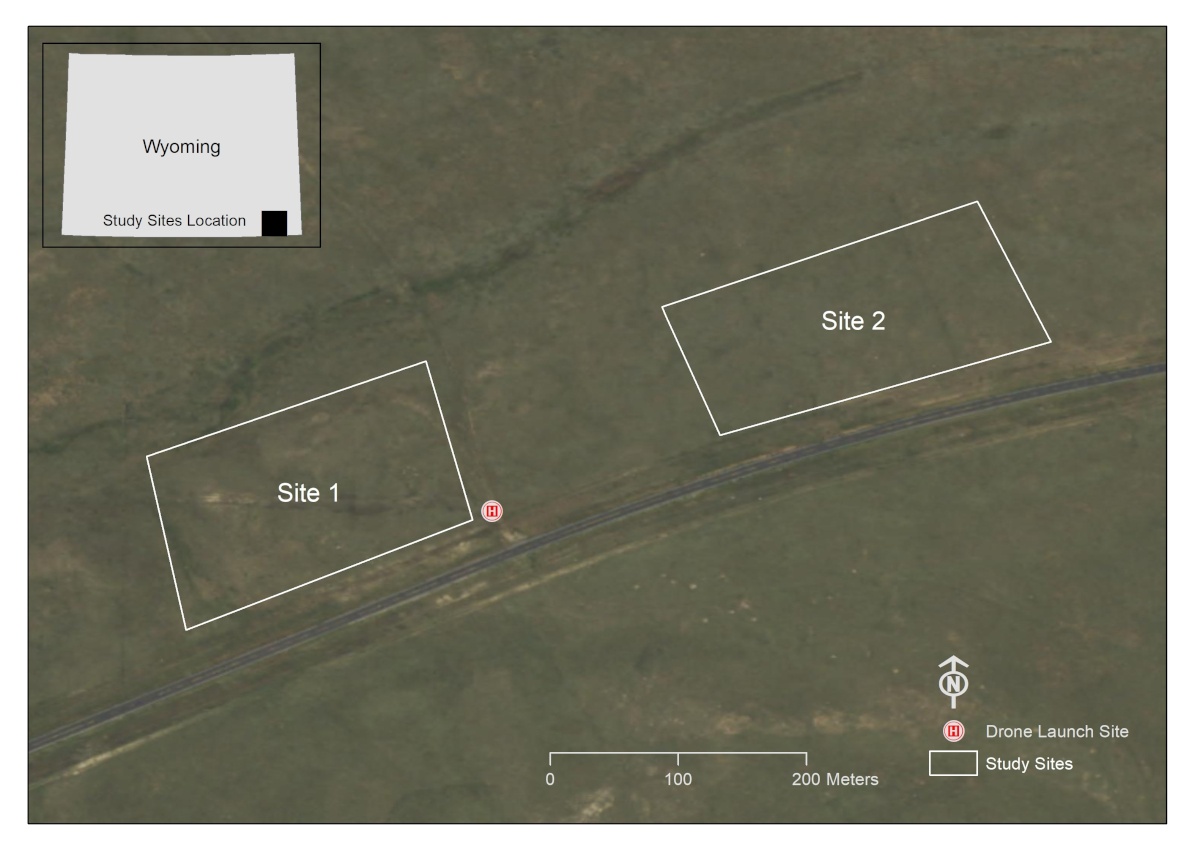
- Utilice un programa de software SIG para dibujar un gráfico poligonal alrededor de las áreas de interés. Este estudio se llevó a cabo en dos parcelas de 10 acres dentro de una parcela de pastoreo en el condado de Laramie, WY, EE. UU. (Figura 1).
- Asegúrese de que las áreas que no están destinadas a estar dentro del marco de muestra se excluyan del polígono (por ejemplo, cuerpos de agua, estructuras de edificios, carreteras, etc.). Esto asegurará que no se tomen imágenes de estas áreas más tarde.
- Convierta el gráfico poligonal en una entidad de shapefile (.shp) en el programa de software SIG y asegúrese de que el shapefile se crea en el sistema de coordenadas deseado.

Figura 1: Representación de las áreas de estudio de interés. Esta ubicación se encuentra en una parcela de pastoreo al sur de Cheyenne en el condado de Laramie, WY, EE. UU. (Fuente de imágenes: Wyoming NAIP Imagery 2017). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Generación de los puntos BAS y optimización del recorrido
NOTA: El código se adjunta como 'Supplemental_Code.docx'.- Utilice el paquete de R 'rgdal'29 para convertir el polígono SIG en un archivo legible por el programa R.
- Utilice el paquete R 'SDraw'30 para generar el número deseado de puntos BAS. En este estudio se utilizaron 30 puntos BAS por área de estudio, aunque se deben realizar investigaciones futuras para determinar la intensidad óptima de muestreo para áreas de diverso tamaño y composición de vegetación.
- Utilice el paquete R 'TSP'27 para pedir los puntos BAS. La visita a los puntos en este orden minimiza el tiempo necesario para obtener muestras en los puntos BAS.
- Preparación para la adquisición de imágenes sin trípode
- Utilice el paquete R 'rgdal' para transferir los puntos del paso 1.2.1 al programa GIS.
- Edite la tabla de atributos del shapefile para que el campo Id. de punto refleje con precisión el orden de ruta optimizado.
- Transfiera el polígono SIG y el archivo de puntos al software SIG que se ejecuta en una unidad portátil.
- Asegúrese de que se ha establecido el sistema de coordenadas proyectadas correcto para el área de interés.
- Preparación para la adquisición de imágenes UAS
- Utilice el paquete R 'rgdal' para transferir los puntos del paso 1.2.1 al programa de software SIG.
- En el programa de software SIG, utilice la herramienta Agregar coordenadas XY para crear y rellenar campos de latitud y longitud en la tabla de atributos de waypoint.
- Exporte la tabla de atributos de waypoint que contiene las columnas Latitud, Longitud y TSP al formato de archivo *.csv.
- Abra el archivo *.csv en un paquete de software adecuado.
- Ordene los puntos de referencia por identificador TSP.
- Abre la aplicación Mission Hub.
- Cree un punto de referencia arbitrario en Mission Hub.
- Exporte un punto de referencia arbitrario como archivo *.csv.
- Abra el archivo *.csv en un programa de hoja de cálculo y elimine los encabezados de columna que mantienen los puntos de referencia arbitrarios.
- Copie los pares de coordenadas de puntos de referencia ordenados por TSP del paso 1.2.3 en las columnas correspondientes del archivo *.csv del paso 1.4.8.
- Importe el archivo *.csv del paso 1.4.10 en Mission Hub como una nueva misión.
- Defina la configuración.
- Marque la casilla Usar elevación en línea .
- Especifique el modo de ruta como líneas rectas.
- Especifique Finalizar acción como RTH para permitir que el dron regrese a casa una vez completada la misión.
- Haga clic en puntos de referencia individuales y agregue acciones especificando los siguientes parámetros: Estancia: 2 s (para evitar el desenfoque de la imagen); Cámara inclinable: -90° (Nadir); Toma una foto.
- Guarde la misión con un nombre apropiado.
- Repita el proceso para sitios adicionales.
2. Recopilación y posprocesamiento de datos de campo
- Registro de la vegetación observada o esperada en el área de estudio
- Antes de adquirir imágenes, cree una lista de la vegetación observada dentro del área de estudio. Esto se puede hacer en una hoja escrita a mano o en un formulario digital para ayudar en la identificación con foto más adelante. Puede ser beneficioso incluir en el inventario las especies que probablemente se esperan en el área, incluso si no se observan en el campo (por ejemplo, especies dentro de mezclas de semillas de recuperación)18.
- Adquisición de imágenes desde tierra
- Conecte una cámara a un monopié vertical y apunte la cámara hacia abajo aproximadamente 60°. El área de la imagen se puede determinar utilizando las especificaciones de lente y resolución (megapíxeles) de la cámara y ajustando el monopie a una altura estándar. La altura del monopié, junto con las especificaciones de la cámara, determinará la distancia de la muestra del suelo (GSD). En este estudio, se utilizó una cámara de 12,1 megapíxeles y el monopié se colocó a una temperatura constante de 1,3 m sobre el suelo para obtener imágenes del Nadir a ~0,3 mm GSD18.
- Incline el monopié hacia adelante para que la lente de la cámara esté en una posición de nadir y el monopié en ángulo no se pueda ver en la imagen.
- Ajuste la altura del monopié o el zoom del objetivo para lograr un tamaño de trazado sin marco de 1 m2 (u otro tamaño de trazado deseado). Para las cámaras con relación de aspecto 4:3 más comunes, un ancho de parcela de 115 cm produce un campo de visión de imagen de 1 m2 . No es necesario colocar un marco en el suelo; Toda la imagen es la trama. Si ajusta el zoom en la lente para lograr esto, use cinta de pintor para evitar cambios accidentales en la configuración del zoom.
- Si es posible, configure la cámara en el modo de prioridad del obturador y ajuste la velocidad del obturador al menos 1/125 s para evitar el desenfoque en la imagen; más rápido si hace viento.
- Localice el primer punto en el orden de ruta optimizado.
- Coloque el monopié en el suelo en el punto 1 e incline el monopié hasta que la cámara esté en la orientación Nadir. Asegúrese de que la sombra del operador no esté en la imagen. Sostenga la cámara firmemente para evitar el desenfoque de movimiento. Adquirir la imagen.
NOTA: Un cable de disparo remoto es útil para este paso. - Compruebe la calidad de la imagen para garantizar una captura de datos exitosa.
- Navegue hasta el siguiente punto en el orden de ruta optimizado y repita los pasos de adquisición.
- Adquisición de imágenes UAS
- Antes de lanzar el UAS, realice un breve reconocimiento del área de estudio para asegurarse de que no haya obstáculos físicos dentro de la trayectoria de vuelo. Este ejercicio de reconocimiento también es útil para localizar una zona bastante plana desde la que lanzar el UAS.
- Asegúrese de que las condiciones meteorológicas sean adecuadas para volar el UAS: un día seco y despejado (>4,8 km de visibilidad) con iluminación adecuada, viento mínimo (<17 nudos) y temperaturas entre 0 °C y 37 °C.
- Siga los protocolos legales. Por ejemplo, en los EE. UU., se deben seguir las políticas de la Administración Federal de Aviación.
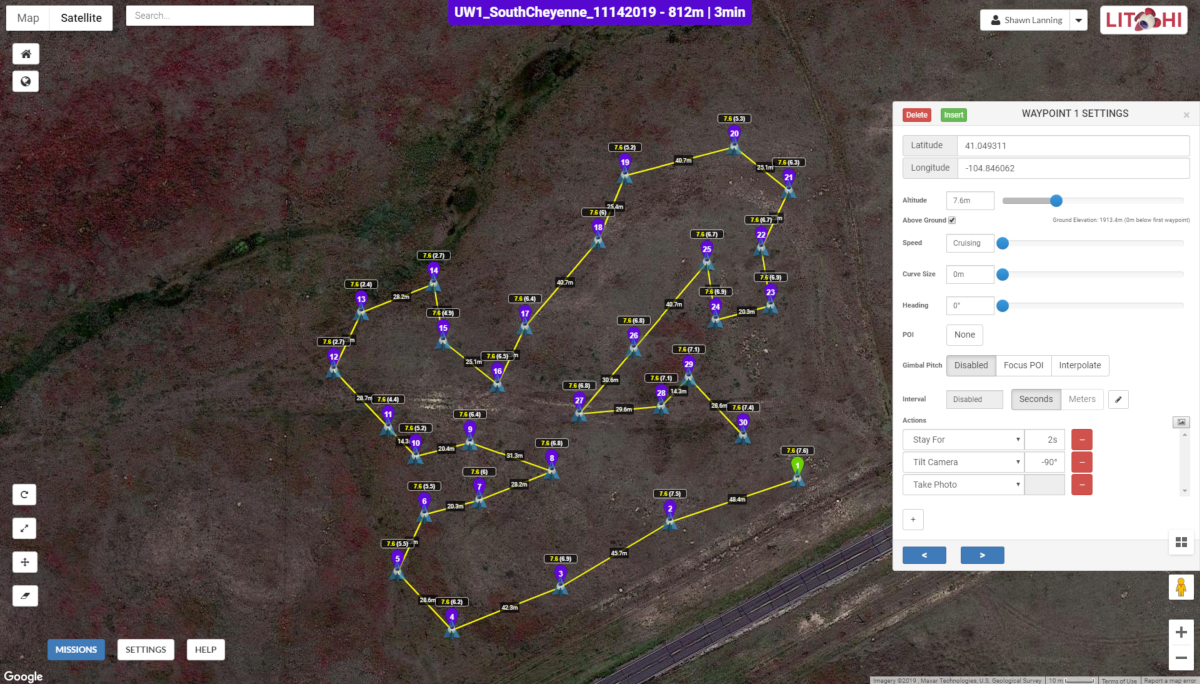
- Utilice el software Mission Hub (Figura 2) y una aplicación de ejecución de misión accesible a través de dispositivos móviles (Figura 3).
- Recopile imágenes de UAS en cada punto BAS como se describe en el paso 1.4.
- Verifique que todas las imágenes se adquirieron utilizando el dispositivo móvil antes de cambiar de ubicación.

Figura 2: Interfaz de usuario de Mission Hub. El mapa muestra la trayectoria de vuelo del dron a lo largo de una serie de 30 puntos BAS a través de uno de los sitios de estudio, mientras que la ventana emergente muestra los parámetros de adquisición de imágenes en cada punto de referencia. La Figura 2 es específica del Sitio 1, aunque es similar en apariencia al Sitio 2. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: La misión de vuelo del waypoint en la aplicación de ejecución de misiones de Litchi ejecutándose en un teléfono inteligente Android. Los identificadores de puntos de referencia únicos se muestran en púrpura y representan el orden relativo en el que se tomaron las imágenes en varios puntos del área de estudio. Los números en cada punto de referencia, como 7(6), indican los valores enteros de las alturas sobre el suelo en las que se tomaron las imágenes (primer número) y las alturas sobre el punto de origen o el sitio de lanzamiento del dron (segundo número). Fíjate en las distancias entre los puntos de referencia sucesivos que están etiquetados en el mapa. La Figura 3 es específica del Sitio 1, aunque es similar en apariencia al Sitio 2. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Postprocesamiento de imágenes a nivel del suelo.
NOTA: Las instrucciones están disponibles en www.SamplePoint.org en la sección del tutorial; Se adjunta un archivo de .pdf complementario.- Descargue imágenes en una computadora con un cable USB o una tarjeta SD.
- Asegúrese de que las imágenes se tomaron en las ubicaciones correctas. Existen varios programas para colocar imágenes en el software SIG en función de los metadatos dentro de las imágenes geoetiquetadas.
- Si las imágenes se adquirieron en varias áreas de estudio, guárdelas en carpetas separadas para el análisis de imágenes.
- Postprocesamiento de imágenes UAS
- Transfiera imágenes guardadas en una tarjeta microSD extraíble desde el UAS a la computadora.
- Repita los pasos 2.4.2 y 2.4.3.
3. Análisis de imágenes
NOTA: Todos los pasos se pueden encontrar en la sección 'tutorial' en www.SamplePoint.org; Se adjunta un archivo 'tutorial.pdf' complementario.
- En SamplePoint, haga clic en Opciones | Asistente de base de datos | Crear/rellenar base de datos.
- Asigne un nombre a la base de datos en función del área de estudio.
- Navegue hasta la carpeta que contiene las muestras de área de estudio deseadas y seleccione las que desea clasificar.
- Haga clic en Listo.
- Haga clic en Opciones | Seleccione Base de datos y seleccione el archivo *.xls que SamplePoint genera en función de la selección de la imagen (estará en la imagen).
- Confirme que se seleccionó el número correcto de imágenes en la base de datos cuando SamplePoint se lo solicite.
- Seleccione el número deseado de píxeles que se analizarán dentro de cada imagen. Esto se puede hacer en un patrón de cuadrícula o aleatoriamente. En este estudio se utilizó una cuadrícula de 6 x 6 para seleccionar un total de 36 píxeles, aunque se pueden clasificar más o menos píxeles por imagen en función de la precisión de medición deseada para la clasificación. Un estudio reciente encontró que 20-30 píxeles por imagen es adecuado para muestrear grandes áreas31. La opción de cuadrícula asegura que los píxeles estarán en la misma posición si se vuelve a analizar la imagen, mientras que la opción aleatoria generará píxeles aleatoriamente cada vez que se vuelva a cargar una imagen.
- Cree un archivo de botón personalizado para la clasificación de especies. Esta lista puede generarse a partir de la lista de vegetación registrada en el campo antes de la adquisición de la imagen, o puede basarse en otra información pertinente al área de estudio (por ejemplo, lista de mezcla de semillas en sitios recuperados, o información de descripción ecológica del sitio, etc.). Asegúrese de que se haya creado un botón para Suelo desnudo o Tierra y otros posibles elementos no relacionados con la vegetación que se puedan encontrar, como basura o roca. Se recomienda crear un botón Desconocido para permitir que el analista clasifique las especies en una fecha posterior. El cuadro de comentarios de SamplePoint se puede usar para anotar los píxeles que usaron esta opción. Además, si la resolución de la imagen no es lo suficientemente alta como para clasificarla a niveles de especie, es beneficioso crear botones para grupos funcionales (por ejemplo, Hierba, Hierba, Arbusto).
- Comience a analizar las imágenes haciendo clic en el botón de clasificación que describe el píxel de la imagen al que se dirige la cruz roja. Repita esto hasta que SamplePoint le indique "Esos son todos los puntos. Haga clic en la siguiente imagen". Repita esto para todas las imágenes de la base de datos.
NOTA: La función Zoom se puede utilizar para ayudar con la clasificación. - Cuando todas las imágenes de la base de datos se hayan analizado por completo, SamplePoint le indicará "Ha agotado todas las imágenes". En este punto, seleccione Aceptar y, a continuación, haga clic en Opciones | Crear archivos de estadísticas.
- Vaya a la carpeta que contiene la base de datos y abra el archivo *.csv que se acaba de crear para asegurarse de que se almacenan los datos de todas las imágenes.
4. Análisis estadístico
- Análisis de Chi-cuadrado para determinar diferencias entre sitios
- Debido a que se recopila y analiza el mismo número de imágenes (unidades de muestreo primarias) y píxeles (unidades de muestreo secundarias) en ambos sitios, la comparación entre los dos sitios puede considerarse un producto de diseño multinomial.
- Utilizando el archivo *.csv creado en el paso 3.11, calcule la suma de los puntos clasificados para cada categoría de clasificación.
- Realice un análisis de chi-cuadrado en las sumas de puntos. Si el Sitio 1 y el Sitio 2 son similares entre sí, un número aproximadamente igual de píxeles clasificados como cada tipo de cubierta será evidente en ambos sitios18.
- Regresión para comparar UAS con imágenes a ras de suelo
- Con los archivos *.csv creados en el paso 3.11, copie y pegue el porcentaje promedio de cobertura de cada imagen y alinee los datos de la imagen UAS con los datos de la imagen a nivel del suelo.
- Realizar análisis de regresión en un programa de base de datos.
Resultados
La adquisición de imágenes UAS tomó menos de la mitad del tiempo de la recolección de imágenes terrestres, mientras que el tiempo de análisis fue ligeramente menor con imágenes terrestres (Tabla 1). Las imágenes terrestres tenían una resolución más alta, lo que probablemente sea la razón por la que se analizaron en menos tiempo. Es probable que las diferencias en los tiempos de los senderos entre los sitios se deban a que los puntos de inicio y fin (sitio de ...
Discusión
La importancia del monitoreo de los recursos naturales ha sido reconocida desde hace mucho tiempo14. Con una mayor atención a las cuestiones ambientales mundiales, es cada vez más importante desarrollar técnicas de vigilancia fiables que sean eficientes en términos de tiempo y costo. Varios estudios previos demostraron que el análisis de imágenes se compara favorablemente con las técnicas tradicionales de monitoreo de vegetación en términos de tiempo, cos...
Divulgaciones
Los autores declaran no tener ningún conflicto de intereses. El software utilizado en este estudio estuvo disponible para los autores, ya sea como código abierto o a través de permisos institucionales. Ningún autor está patrocinado por ningún software utilizado en este estudio y reconoce que hay otros programas de software disponibles que son capaces de realizar investigaciones similares.
Agradecimientos
Esta investigación fue financiada en su mayoría por el Centro de Recuperación y Restauración de Wyoming y Jonah Energy, LLC. Agradecemos a Warren Resources y Escelara Resources por financiar la unidad Trimble Juno 5. Agradecemos a Jonah Energy, LLC por su continuo apoyo para financiar el monitoreo de la vegetación en Wyoming. Agradecemos al Centro de Ciencias de Información Geográfica de Wyoming por proporcionar el equipo UAS utilizado en este estudio.
Materiales
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
Referencias
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524 (2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7 Available from: https://CRAN.R-project.org/package=TSP (2019)
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- rgdal: bindings for geospatial data abstraction library. R package version 1.2-7 Available from: https://CRAN.R-project.org/package=rgdal (2017)
- SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3 Available from: https://CRAN.R-project.org/package=SDraw (2016)
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049 (2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041 (2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados