
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
地面无人机系统图像与空间平衡采样和路线优化相结合,以监测牧场植被
摘要
本文提出的协议利用路线优化、平衡验收采样以及地面和无人机系统 (UAS) 图像来有效监测牧场生态系统中的植被。比较了从地面和 UAS 方法获得的图像结果。
摘要
牧场生态系统覆盖全球 36 亿公顷,其中 2.39 亿公顷位于美国。这些生态系统对于维持全球生态系统服务至关重要。需要监测这些生态系统中的植被,以评估牧场健康状况,衡量野生动物和家畜的栖息地适宜性,对抗入侵性杂草,并阐明时间环境变化。尽管牧场生态系统覆盖面积广阔,但传统的监测技术通常耗时且成本效益低下,受到观察者高度偏见的影响,并且通常缺乏足够的空间信息。基于图像的植被监测速度更快,可以生成永久记录(即图像),可以减少观察者的偏见,并且本身就包含足够的空间信息。空间平衡采样设计有利于监测自然资源。提出了一种用于实施空间平衡采样设计的协议,称为平衡验收采样 (BAS),使用从地面相机和无人机系统 (UAS) 获取的图像。除了解决“旅行推销员问题”(TSP) 之外,还使用路线优化算法来提高时间和成本效率。虽然 UAS 图像的采集速度比手持图像快 2-3 倍,但两种类型的图像在准确度和精度方面彼此相似。最后,讨论了每种方法的优缺点,并提供了这些方法在其他生态系统中的潜在应用示例。
引言
牧场生态系统涵盖广阔的区域,美国占地 2.39 亿公顷,全球面积为 36 亿公顷1。牧场提供广泛的生态系统服务,牧场管理涉及多种土地用途。在美国西部,牧场为野生动物提供栖息地、储水、碳封存和家畜草料 2。牧场受到各种干扰,包括入侵物种、野火、基础设施开发和自然资源开采(例如石油、天然气和煤炭)3。植被监测对于维持全球牧场和其他生态系统的资源管理至关重要 4,5,6.牧场植被监测通常用于评估牧场健康状况、野生动物物种的栖息地适宜性,以及对入侵物种、野火和自然资源开采引起的景观变化进行分类 7,8,9,10。虽然具体监测计划的目标可能有所不同,但希望监测计划能够满足多个利益相关者的需求,同时在统计上可靠、可重复和经济 5,7,11。尽管土地管理者认识到监测的重要性,但它通常被视为不科学、不经济和繁琐5。
传统上,牧场监测采用多种方法进行,包括目测或目测10、Daubenmire 框架12、绘图13 和沿植被样带的线点截距14。虽然目测或目测很省时,但它会受到很高的观察者偏差15 的影响。其他传统方法虽然也受到很高的观察者偏差,但由于时间和成本要求,通常效率低下 6,15,16,17。实施许多这些传统方法所需的时间通常过于繁重,因此难以获得统计上有效的样本量,从而导致总体估计不可靠。这些方法通常是基于方便而不是随机应用的,观察者可以选择他们收集数据的位置。此外,报告的样本位置和实际样本位置经常不同,这给依赖植被监测数据的土地管理者和其他利益相关者造成了混淆18。最近的研究表明,基于图像的植被监测既省时又省钱 6,19,20。与更耗时的传统技术相比,在短时间内增加可在给定区域内采样的数据量应该可以提高数据的统计可靠性。图像是永久记录,在收集外业数据后,多个观察者可以对其进行分析6。此外,许多相机配备了全球定位系统 (GPS),因此可以使用采集位置18,20 对图像进行地理标记。使用计算机生成的采样点,准确定位在野外,无论图像是使用手持相机还是无人机系统获取的,都应该可以减少观察者的偏差,因为它降低了单个观察者使用他们对样本位置应放置位置的意见的倾向。
除了耗时、昂贵和受观察者高度偏见的影响外,由于样本量小和采样位置集中,传统的自然资源监测经常无法充分描述异质牧场的特征21。空间平衡采样设计在感兴趣区域更均匀地分布样本位置,以更好地描述自然资源的特征 21,22,23,24。这些设计可以降低抽样成本,因为相对于简单随机抽样,需要更小的样本量才能实现统计准确性25。
在这种方法中,称为平衡验收采样 (BAS)22,24 的空间平衡采样设计与基于图像的监测相结合,以评估牧场植被。BAS 点以最佳方式分布在感兴趣区域26 上。但是,这并不能保证将点排列在最佳路线中探访 20.因此,BAS 点是使用解决旅行推销员问题 (TSP) 的路线优化算法来安排的27。按此顺序访问点可确定连接点的最佳路径(即最小距离)。BAS 点被传输到地理信息系统 (GIS) 软件程序中,然后传输到配备 GPS 的手持式数据采集单元中。定位 BAS 点后,使用配备 GPS 的相机以及使用飞行软件作的无人机系统拍摄图像。进入现场后,技术人员走到每个点,在每个 BAS 点采集 1 m2 安装在独脚架上的相机图像,地面采样距离 (GSD) 为 0.3 mm,而 UAS 则飞到相同的点并采集 2.4 mm-GSD 图像。随后,使用 'SamplePoint'28 生成植被覆盖数据,以手动分类 36 个点/图像。比较了通过分析地面和 UAS 影像生成的植被覆盖数据,以及每种方法报告的采集时间。在代表性研究中,使用了两个相邻的 10 英亩牧场地块。最后,讨论了这种方法的其他应用以及如何为未来的项目或其他生态系统中的项目进行修改。
Access restricted. Please log in or start a trial to view this content.
研究方案
1. 定义研究区域,生成样本点和行进路径,以及实地准备
- 研究领域的定义
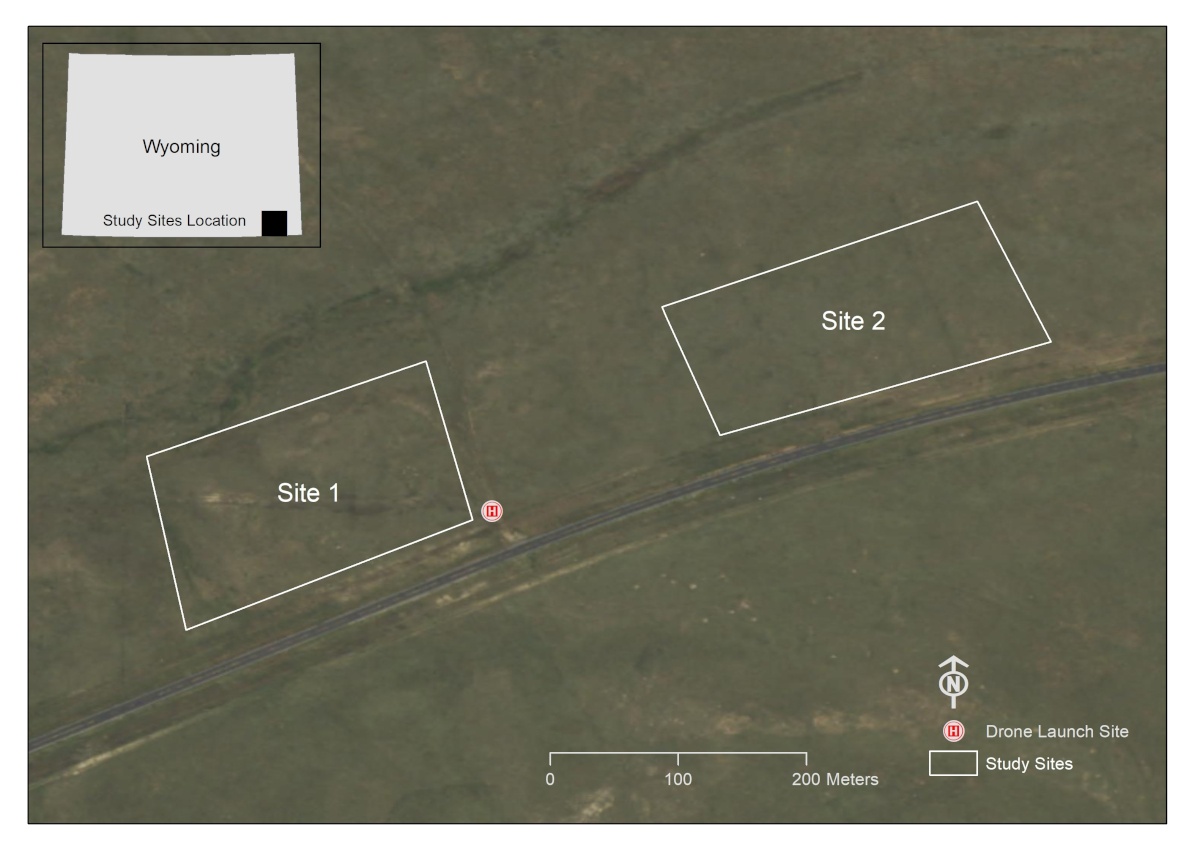
- 使用 GIS 软件程序在感兴趣区域周围绘制多边形图形。这项研究是在美国怀俄明州拉勒米县的一个放牧地内的两个 10 英亩的地块上进行的(图 1)。
- 确保将那些不打算位于采样框内的区域(例如,水体、建筑结构、道路等)排除在面之外。这将确保以后不会拍摄这些区域的图像。
- 在 GIS 软件程序中将面图形转换为 shapefile 要素 (.shp),并确保在所需的坐标系中创建 shapefile。

图 1:感兴趣研究区域的描述。 该地点位于美国怀俄明州拉勒米县夏延以南的牧场上(图像来源:怀俄明州 NAIP 图像 2017)。 请单击此处查看此图的较大版本。
{kind=link}
- 生成 BAS 点并优化行驶路径
注意:代码附加为“Supplemental_Code.docx”。- 使用 R 包 'rgdal'29 将 GIS 多边形转换为 Program R 可读文件。
- 使用 R 包 'SDraw'30 生成所需数量的 BAS 点。这项研究在每个研究区域使用了 30 个 BAS 点,但应进行未来的研究以确定各种大小和植被组成的区域的最佳采样强度。
- 使用 R 包 'TSP'27 订购 BAS 点。按此顺序访问这些点可最大程度地减少在 BAS 点获取样本所需的时间。
- 准备手持式图像采集
- 使用 R 包 'rgdal' 将步骤 1.2.1 中的点传输回 GIS 程序。
- 编辑 shapefile 的属性表,使点 ID 字段准确反映优化的路径顺序。
- 将 GIS 多边形和点文件传输到手持设备上运行的 GIS 软件中。
- 确保感兴趣区域的正确投影坐标系已就位。
- UAS 影像采集的准备工作
- 使用 R 软件包 'rgdal' 将步骤 1.2.1 中的点传输回 GIS 软件程序。
- 在 GIS 软件程序中,使用 添加 XY 坐标 工具在航路点属性表中创建并填充纬度和经度字段。
- 将包含 Latitude、Longitude 和 TSP 列的航点属性表导出为 *.csv 文件格式。
- 在相应的软件包中打开 *.csv 文件。
- 按 TSP 标识符对航点进行排序。
- 打开 Mission Hub 应用程序。
- 在 Mission Hub 中创建任意航点。
- 将任意航点导出为 *.csv 文件。
- 在电子表格程序中打开 *.csv 文件,并删除任意航路点保留列标题。
- 将步骤 1.2.3 中 TSP 排序的航点坐标对复制到步骤 1.4.8 中 *.csv 文件中的相关列中。
- 将步骤 1.4.10 中的 *.csv 文件作为新任务导入 Mission Hub。
- 定义设置。
- 选中 Use Online Elevation (使用在线海拔 ) 框。
- 将 Path Mode 指定为 Straight lines。
- 将 Finish Action 指定为 RTH ,以使无人机能够在任务完成后 返航 。
- 单击单个航点并通过指定以下参数 添加作 :停留:2 秒(以避免图像模糊);倾斜摄像头:-90°(最低点);拍照。
- 使用适当的名称保存任务。
- 对其他站点重复该过程。
2. 现场数据收集和后处理
- 记录在研究区域中观察到或预期的植被
- 在获取图像之前,请创建在研究区域内观察到的植被列表。这可以在手写表格或数字表格上完成,以帮助以后进行照片识别。将该地区可能预期的物种纳入清单中可能是有益的,即使它们没有在野外观察到(例如,开垦种子混合物中的物种)18。
- 地面图像采集
- 将相机安装到垂直独脚架上,并将相机向下指向约 60°。可以使用相机的镜头和分辨率(百万像素)规格并将独脚架设置为标准高度来确定图像的面积。独脚架的高度与相机规格相结合,将决定地面采样距离 (GSD)。在这项研究中,使用了一台 12.1 MP 的相机,并将独脚架设置在离地面 1.3 m 的恒定位置,以获得 ~0.3 mm GSD18 的最低点图像。
- 向前倾斜独脚架,使相机镜头处于像底点位置,并且在图像中看不到倾斜的独脚架。
- 调整独脚架的高度或镜头上的变焦,以实现 1 m2 的无框绘图大小(或其他所需的绘图大小)。对于最常见的 4:3 纵横比相机,115 cm 的绘图宽度会产生 1 m2 的像场。无需在地面上放置框架;整个图像就是情节。如果调整镜头上的变焦来实现此目的,请使用油漆胶带以防止意外更改变焦设置。
- 如果可能,请将照相机设为快门优先模式,并将快门速度至少设为1/125秒,以避免图像模糊;如果有风,则更快。
- 在优化的路径顺序中找到第一个点。
- 将独脚架放在点 1 处的地面上,然后倾斜独脚架,直到相机处于像底点方向。确保作员的阴影不在图像中。稳住摄像机以防止运动模糊。获取图像。
注意:远程触发电缆对于此步骤非常有用。 - 检查图像质量以确保成功捕获数据。
- 导航到优化路径顺序中的下一个点,然后重复采集步骤。
- UAS 图像采集
- 在启动 UAS 之前,对研究区域进行简短的侦察,以确保飞行路径内没有物理障碍物。这种侦察演习对于找到一个相当平坦的区域来发射无人机系统也很有用。
- 确保天气条件适合无人机飞行:干燥、晴朗的一天(能见度>4.8 公里),光线充足,风力最小(<17 节),温度在 0 °C–37 °C 之间。
- 遵守法律协议。例如,在美国,应遵循联邦航空管理局的政策。
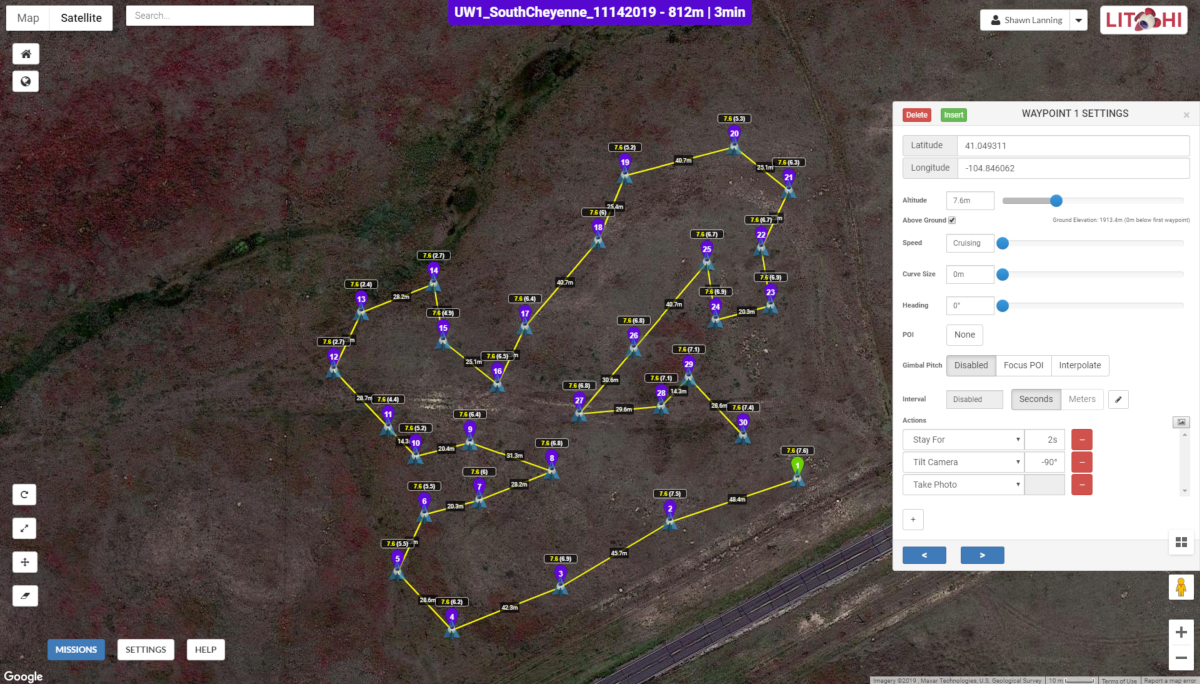
- 利用 Mission Hub 软件(图 2)和可通过移动设备访问的任务执行应用程序(图 3)。
- 如步骤 1.4 中所述,在每个 BAS 点收集 UAS 影像。
- 验证所有图像都是在更改位置之前使用移动设备采集的。

图 2:Mission Hub 的用户界面。 该地图描绘了无人机在其中一个研究地点沿一系列 30 个 BAS 点的飞行路径,同时弹出窗口显示每个航路点的图像采集参数。 图 2 特定于站点 1,尽管它在外观上与站点 2 相似。 请单击此处查看此图的较大版本。
{kind=link}

图 3:在 Android 智能手机上运行的 Litchi 任务执行应用程序中的航点飞行任务。 唯一航路点 ID 以紫色显示,表示在研究区域中的各个点拍摄影像的相对顺序。每个航路点的数字(例如 7(6))表示拍摄图像的地面以上高度(第一个数字)和起始点或无人机发射场上方的高度(第二个数字)的整数值。请注意地图上标记的连续航点之间的距离。 图 3 特定于站点 1,尽管它在外观上与站点 2 相似。 请单击此处查看此图的较大版本。
{kind=link}
- 地面图像后处理。
注意:教程部分的 www.SamplePoint.org 处提供了方向;附加了补充.pdf文件。- 使用 USB 数据线或 SD 卡将图像下载到计算机上。
- 确保在正确的位置拍摄图像。存在各种软件,用于根据地理标记图像中的元数据将图像放入 GIS 软件中。
- 如果图像是在多个研究区域中采集的,请将其存储在单独的文件夹中以进行图像分析。
- UAS 图像后处理
- 将保存在可移动 microSD 卡上的图像从 UAS 传输到计算机。
- 重复步骤 2.4.2 和 2.4.3。
3. 图像分析
注意:所有步骤都可以在 www.SamplePoint.org 的“教程”部分找到;附加了补充的 'tutorial.pdf' 文件。
- 在 SamplePoint 中,单击 选项 |数据库向导 |创建/填充数据库。
- 根据研究区域命名数据库。
- 导航到包含所需研究区域样本的文件夹,然后选择要分类的样本。
- 单击 Done。
- 单击 选项 |选择 Database 并选择 SamplePoint 根据图像选择生成的 *.xls 文件(该文件将位于图像中)。
- 当 SamplePoint 提示时,确认在数据库中选择了正确的图像数量。
- 选择要在每个图像中分析的所需像素数。这可以以网格模式或随机方式完成。这项研究使用 6 x 6 网格来选择总共 36 个像素,尽管可以根据所需的分类测量精度对每张图像的更多或更少的像素进行分类。最近的一项研究发现,每张图像 20-30 像素足以对大面积区域进行采样31。网格选项可确保在重新分析图像时像素将位于同一位置,而随机选项将在每次重新加载图像时随机生成像素。
- 创建用于物种分类的自定义 Button 文件。该列表可以根据图像采集前在野外记录的植被列表生成,也可以基于与研究区域相关的其他信息(例如,开垦地点的种子混合列表或生态地点描述信息等)。确保为 Bare Ground 或 Soil 以及可能遇到的其他潜在非植被项目(例如 Litter 或 Rock)创建一个按钮。建议创建一个 Unknown 按钮,以允许分析人员在以后对物种进行分类。SamplePoint 中的 Comment Box (注释框 ) 可用于记录使用此选项的像素。此外,如果图像分辨率不够高,无法分类到物种级别,则为功能组(例如, 草、 杂草、 灌木)创建按钮是有益的。
- 通过单击描述红色十字准线所针对的图像像素的分类按钮开始分析图像。重复此作,直到 SamplePoint 提示“That's all the points.单击下一张图片。对数据库中的所有图像重复此作。
注意: 缩放 功能可用于帮助进行分类。 - 当数据库中的所有图像都被完全分析后,SamplePoint 将提示“您已用尽所有图像”。此时,选择 确定 , 然后单击 选项 |创建统计信息文件。
- 转到包含数据库的文件夹并打开刚刚创建的 *.csv 文件,以确保存储所有图像的数据。
4. 统计分析
- 用于确定站点之间差异的卡方分析
- 由于在两个站点收集和分析的图像(主要采样单元)和像素(次要采样单元)数量相同,因此两个站点之间的比较可以被视为多项式设计的产物。
- 使用在步骤 3.11 中创建的 *.csv 文件,计算为每个分类类别分类的点总和。
- 对点和执行卡方分析。如果站点 1 和站点 2 彼此相似,则分类为每种封面类型的像素数量在两个站点上将明显相等18。
- 回归以比较 UAS 与地面图像
- 使用在步骤 3.11 中创建的 *.csv 文件,复制并粘贴每个图像的平均覆盖率百分比,并将 UAS 图像数据与地面图像数据对齐。
- 在数据库程序中执行回归分析。
Access restricted. Please log in or start a trial to view this content.
结果
UAS 图像采集花费的时间不到地面图像采集时间的一半,而地面图像的分析时间略短(表 1)。地面图像的分辨率更高,这可能是它们在更短的时间内被分析的原因。站点之间步行路径时间的差异可能是由于起点和终点(发射场)比站点 2 更靠近站点 1(图 1)。平台之间采集时间的差异主要是由于 UAS 的飞行速度比技术人员的行走速度快 ...
Access restricted. Please log in or start a trial to view this content.
讨论
自然资源监测的重要性早已得到认可14.随着对全球环境问题的日益关注,开发具有时间和成本效益的可靠监测技术变得越来越重要。先前的几项研究表明,图像分析在时间、成本以及提供有效和有防御性的统计数据方面优于传统的植被监测技术 6,31。地面图像采集的速度可以比线点截距18,31
Access restricted. Please log in or start a trial to view this content.
披露声明
作者声明没有利益冲突。本研究中使用的软件可以作为开源软件或通过机构许可提供给作者。没有作者得到本研究中使用的任何软件的赞助,并承认有其他软件程序能够进行类似的研究。
致谢
这项研究主要由怀俄明州开垦和恢复中心和 Jonah Energy, LLC 资助。我们感谢 Warren Resources 和 Escelara Resources 为 Trimble Juno 5 装置提供资金。我们感谢 Jonah Energy, LLC 对资助怀俄明州植被监测的持续支持。我们感谢怀俄明州地理信息科学中心提供本研究中使用的 UAS 设备。
Access restricted. Please log in or start a trial to view this content.
材料
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
参考文献
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , CRC Press. Boca Raton, FL. 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , Aitkenvale, Queensland, Australia. (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , Denver, CO, USA. (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524(2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- Hahsler, M., Hornik, K. TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7. , Available from: https://CRAN.R-project.org/package=TSP (2019).
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- Bivand, R., Keitt, T., Rowlingson, B. rgdal: bindings for geospatial data abstraction library. R package version 1.2-7. , Available from: https://CRAN.R-project.org/package=rgdal (2017).
- McDonald, T. SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3. , Available from: https://CRAN.R-project.org/package=SDraw (2016).
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049(2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041(2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Access restricted. Please log in or start a trial to view this content.
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。