
JoVE 비디오를 활용하시려면 도서관을 통한 기관 구독이 필요합니다. 전체 비디오를 보시려면 로그인하거나 무료 트라이얼을 시작하세요.
Method Article
방목장 식생을 모니터링하기 위해 공간적으로 균형 잡힌 샘플링 및 경로 최적화와 결합된 지상 무인 항공 시스템 이미지
요약
이 백서에 제시된 프로토콜은 경로 최적화, 균형 수용 샘플링, 지상 및 무인 항공기 시스템(UAS) 이미지를 활용하여 방목장 생태계의 식생을 효율적으로 모니터링합니다. 지상 및 UAS 방법으로 얻은 이미지의 결과를 비교합니다.
초록
방목장 생태계는 전 세계적으로 36억 헥타르를 차지하며 미국에는 2억 3,900만 헥타르가 있습니다. 이러한 생태계는 글로벌 생태계 서비스를 유지하는 데 매우 중요합니다. 이러한 생태계의 식생 모니터링은 방목장 건강을 평가하고, 야생 동물 및 가축의 서식지 적합성을 측정하고, 침입성 잡초와 싸우고, 일시적인 환경 변화를 설명하기 위해 필요합니다. 방목장 생태계는 광대한 지역을 포괄하지만, 기존의 모니터링 기술은 종종 시간이 많이 걸리고 비용 효율성이 낮고 관찰자 편향이 높으며 적절한 공간 정보가 부족한 경우가 많습니다. 이미지 기반 식생 모니터링은 더 빠르고, 영구적인 기록(즉, 이미지)을 생성하고, 관찰자 편향을 줄일 수 있으며, 본질적으로 적절한 공간 정보를 포함합니다. 공간적으로 균형 잡힌 샘플링 설계는 천연 자원을 모니터링하는 데 유용합니다. 지상 카메라 및 무인 항공 시스템(UAS)에서 획득한 이미지를 사용하여 BAS(Balanced Acceptance Sampling)로 알려진 공간적으로 균형 잡힌 샘플링 설계를 구현하기 위한 프로토콜이 제시됩니다. 경로 최적화 알고리즘은 '출장 판매원 문제'(TSP)를 해결하는 데 추가로 사용되어 시간과 비용 효율성을 높입니다. UAS 이미지는 핸드헬드 이미지보다 2-3배 더 빠르게 획득할 수 있지만, 두 가지 유형의 이미지는 정확성과 정밀도 측면에서 서로 유사합니다. 마지막으로 각 방법의 장단점에 대해 논의하고 다른 생태계에서 이러한 방법에 대한 잠재적 응용 프로그램의 예를 제공합니다.
서문
방목장 생태계는 미국에서 2억 3,900만 ha, 전 세계적으로 36억 ha에 이르는 광대한 지역을 포괄합니다1. 방목장은 다양한 생태계 서비스를 제공하며 방목장 관리에는 여러 토지 이용이 포함됩니다. 미국 서부의 방목장은 야생 동물 서식지, 물 저장, 탄소 격리 및 가축을 위한 사료를 제공합니다2. 방목장은 침입종, 산불, 기반 시설 개발, 천연 자원 추출(예: 석유, 가스 및 석탄)을 포함한 다양한 교란의 영향을 받습니다3. 식생 모니터링은 전 세계의 방목장 및 기타 생태계 내에서 자원 관리를 유지하는 데 매우 중요합니다 4,5,6. 방목장의 식생 모니터링은 방목장 건강, 야생 동물 종에 대한 서식지 적합성을 평가하고 침입종, 산불 및 천연 자원 추출로 인한 경관 변화를 목록화하는 데 자주 사용됩니다 7,8,9,10. 특정 모니터링 프로그램의 목표는 다양할 수 있지만, 통계적으로 신뢰할 수 있고 반복 가능하며 경제적인 동시에 여러 이해 관계자의 요구에 맞는 모니터링 프로그램이 바람직합니다 5,7,11. 토지 관리자들은 모니터링의 중요성을 인식하고 있지만, 모니터링은 종종 비과학적이고 비경제적이며 부담스러운 것으로 여겨진다5.
전통적으로 방목장 모니터링은 육안 또는 시각적 추정10, 다우벤미어 프레임(Daubenmire frames)12, 플롯 차트(plot charting)13, 식생 횡단부(scale transects)14를 따라 선 점 절편(line point intercept)14 등 다양한 방법으로 수행되었다. 육안 또는 시각적 추정은 시간 효율적이지만 높은 관찰자 편향15의 영향을 받습니다. 다른 전통적인 방법도 높은 관찰자 편향의 영향을 받으며 시간과 비용이 많이 들기 때문에 비효율적인 경우가 많습니다 6,15,16,17. 이러한 전통적인 방법 중 많은 부분을 구현하는 데 필요한 시간은 종종 너무 부담스러워 통계적으로 유효한 표본 크기를 얻기 어렵게 만들어 신뢰할 수 없는 모집단 추정치를 초래합니다. 이러한 방법은 확률적이라기보다는 편의에 따라 적용되는 경우가 많으며, 관찰자는 데이터를 수집하는 위치를 선택합니다. 또한 보고된 샘플 위치와 실제 샘플 위치가 자주 달라 식생 모니터링 데이터에 의존하는 토지 관리자 및 기타 이해 관계자에게 혼란을 야기합니다18. 최근 연구에 따르면 이미지 기반 식생 모니터링은 시간과 비용 측면에서 효율적입니다 6,19,20. 짧은 시간 내에 주어진 영역 내에서 샘플링할 수 있는 데이터의 양을 늘리면 시간이 많이 걸리는 기존 기술에 비해 데이터의 통계적 신뢰성이 향상됩니다. 이미지는 현장 데이터를 수집한 후 여러 관찰자가 분석할 수 있는 영구적인 기록입니다6. 또한 많은 카메라에는 GPS(Global Positioning System)가 장착되어 있으므로 수집 위치18,20으로 이미지에 위치 정보 태그를 지정할 수 있습니다. 현장에서 정확하게 위치한 컴퓨터 생성 샘플링 포인트를 사용하면 이미지가 핸드헬드 카메라로 획득되든 무인 항공 시스템으로 획득하든 관계없이 관찰자 편향을 줄일 수 있습니다.
시간이 많이 걸리고 비용이 많이 들며 관찰자 편향이 높을 뿐만 아니라, 기존의 천연자원 모니터링은 낮은 표본 크기와 집중된 표본 추출 위치로 인해 이질적인 방목장을 적절하게 특성화하지 못하는 경우가 많습니다21. 공간적으로 균형 잡힌 샘플링 설계는 천연 자원을 더 잘 특성화하기 위해 관심 영역에 걸쳐 샘플 위치를 보다 고르게 분배합니다 21,22,23,24. 이러한 설계는 단순 무작위 표본추출에 비해 통계적 정확도를 달성하기 위해 더 작은 표본 크기가 필요하기 때문에 표본 추출 비용을 줄일 수 있습니다25.
이 방법에서는 BAS(Balanced Acceptance Sampling)22,24로 알려진 공간적으로 균형 잡힌 샘플링 설계가 이미지 기반 모니터링과 결합되어 방목지 식생을 평가합니다. BAS 포인트는 관심 영역26에 최적으로 분포되어 있습니다. 그러나, 이는 포인트가 visitation20을 위한 최적의 경로로 정렬된다는 것을 보장하지 않는다. 따라서 BAS 포인트는 출장 판매원 문제(TSP)27를 해결하는 경로 최적화 알고리즘을 사용하여 정렬됩니다. 이 순서로 점을 방문하면 점을 연결하는 최적의 경로(즉, 최소 거리)가 결정됩니다. BAS 포인트는 지리 정보 시스템(GIS) 소프트웨어 프로그램으로 전송된 다음 GPS가 장착된 휴대용 데이터 수집 장치로 전송됩니다. BAS 지점을 찾은 후 GPS가 장착된 카메라와 비행 소프트웨어를 사용하여 작동하는 무인 항공 시스템으로 이미지를 촬영합니다. 현장에 들어가면 기술자가 각 지점으로 걸어가 각 BAS 지점에서 0.3mm GSD(Ground Sample Distance)로1m2 모노포드 탑재 카메라 이미지를 획득하고, UAS는 동일한 지점으로 비행하여 2.4mm-GSD 이미지를 획득합니다. 그 후, 'SamplePoint'28을 사용하여 식생 피복 데이터를 생성하여 36개의 점/이미지를 수동으로 분류합니다. 지상 및 UAS 이미지 분석에서 생성된 식생 피복 데이터를 비교하고 각 방법에 대해 보고된 획득 시간을 비교합니다. 대표적인 연구에서는 인접한 두 개의 10에이커 방목장 부지가 사용되었습니다. 마지막으로, 이 방법의 다른 응용과 향후 프로젝트 또는 다른 생태계의 프로젝트를 위해 어떻게 수정될 수 있는지에 대해 논의합니다.
프로토콜
1. 연구 영역 정의, 샘플 포인트 및 이동 경로 생성, 현장 준비
- 연구 분야의 정의
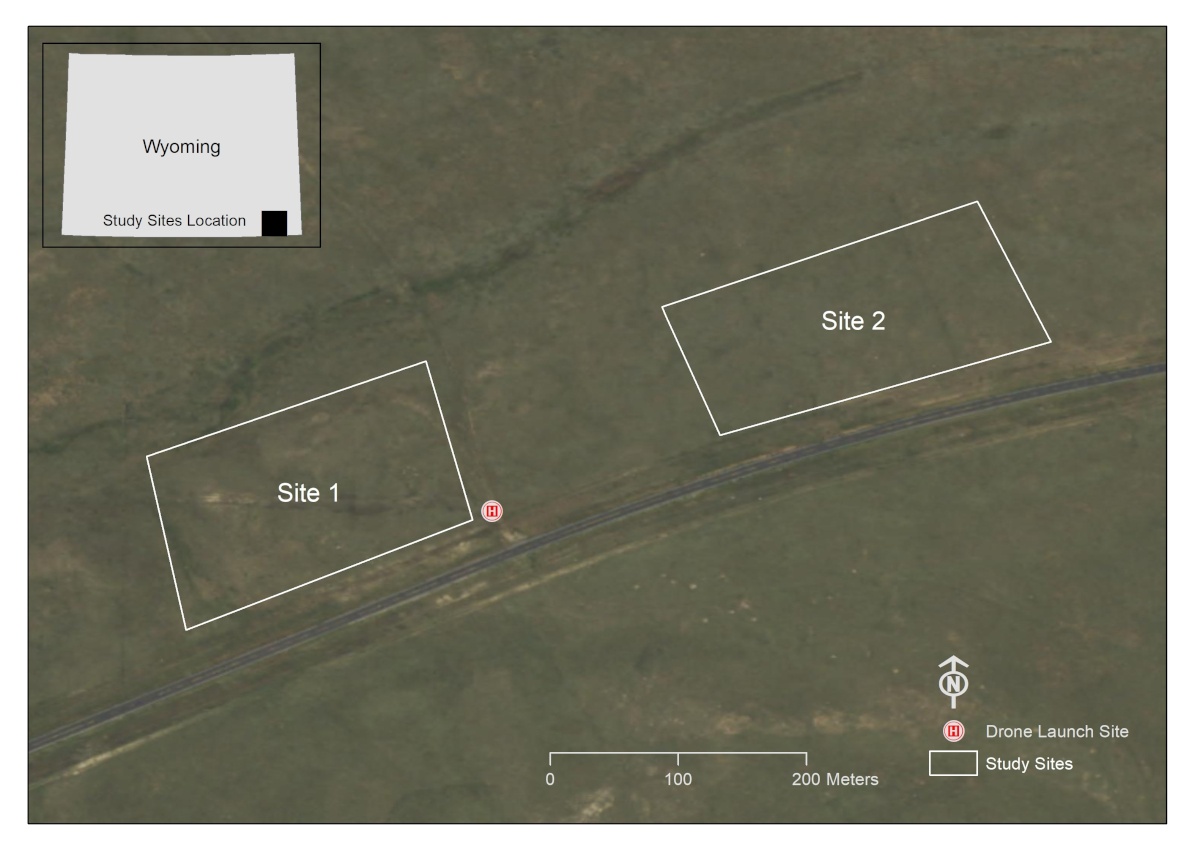
- GIS 소프트웨어 프로그램을 사용하여 관심 영역 주위에 폴리곤 그래픽을 그립니다. 이 연구는 미국 와이오밍주 래러미 카운티에 있는 방목 구역 내에 있는 두 개의 10에이커 부지에서 수행되었습니다(그림 1).
- 샘플 프레임 내에 포함되도록 의도되지 않은 영역(예: 수역, 건물 구조물, 도로 등)이 폴리곤에서 제외되었는지 확인합니다. 이렇게 하면 나중에 이러한 영역의 이미지가 촬영되지 않습니다.
- GIS 소프트웨어 프로그램에서 폴리곤 그래픽을 shapefile 피쳐(.shp)로 변환하고 shapefile이 원하는 좌표계에서 생성되었는지 확인합니다.

그림 1: 관심 연구 영역에 대한 묘사 .이 위치는 미국 와이오밍주 래러미 카운티의 샤이엔 남쪽 방목지에 있습니다(이미지 출처: Wyoming NAIP Imagery 2017). 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
- BAS 포인트 생성 및 이동 경로 최적화
참고: 코드는 'Supplemental_Code.docx'로 첨부되어 있습니다.- R 패키지 'rgdal'29를 사용하여 GIS 폴리곤을 Program R에서 읽을 수 있는 파일로 변환합니다.
- R 패키지 'SDraw'30을 사용하여 원하는 수의 BAS 포인트를 생성합니다. 이 연구는 연구 영역당 30개의 BAS 포인트를 사용했지만, 다양한 크기와 식생 구성을 가진 지역에 대한 최적의 샘플링 강도를 결정하기 위해 향후 연구를 수행해야 합니다.
- R 패키지 'TSP'27 을 사용하여 BAS 포인트를 주문합니다. 이 순서로 지점을 방문하면 BAS 지점에서 샘플을 얻는 데 필요한 시간을 최소화할 수 있습니다.
- 휴대용 이미지 획득을 위한 준비
- R 패키지 'rgdal'을 사용하여 1.2.1 단계의 포인트를 GIS 프로그램으로 다시 전송하십시오.
- 포인트 ID 필드에 최적화된 경로 순서가 정확하게 반영되도록 shapefile의 속성 테이블을 편집합니다.
- GIS 다각형 및 점 파일을 핸드헬드 장치에서 실행되는 GIS 소프트웨어로 전송합니다.
- 관심 영역에 대한 올바른 투영 좌표계가 있는지 확인합니다.
- UAS 이미지 획득 준비
- R 패키지 'rgdal'을 사용하여 1.2.1 단계의 포인트를 GIS 소프트웨어 프로그램으로 다시 전송하십시오.
- GIS 소프트웨어 프로그램에서 Add XY Coordinates 도구를 사용해서 웨이포인트 속성 테이블에 위도 및 경도 필드를 생성하고 채울 수 있습니다.
- Latitude, Longitude 및 TSP 열이 포함된 웨이포인트 속성 테이블을 *.csv 파일 형식으로 내보냅니다.
- 해당 소프트웨어 패키지에서 *.csv 파일을 엽니다.
- TSP 식별자를 기준으로 웨이포인트를 정렬합니다.
- 미션 허브 앱을 엽니다.
- 미션 허브에서 임의의 웨이포인트를 생성합니다.
- 임의의 웨이포인트를 *.csv 파일로 내보냅니다.
- 스프레드시트 프로그램에서 *.csv 파일을 열고 열 머리글을 유지하는 임의의 웨이포인트를 삭제합니다.
- 1.2.3단계의 TSP 정렬된 웨이포인트 좌표 쌍을 1.4.8단계의 *.csv 파일의 관련 열로 복사합니다.
- 1.4.10단계의 *.csv 파일을 미션 허브에 새 미션으로 가져옵니다.
- 설정을 정의합니다.
- Use Online Elevation(온라인 고도 사용) 상자를 선택합니다.
- 경로 모드를 직선으로 지정합니다.
- Finish Action을 RTH로 지정하여 임무가 완료된 후 드론이 집으로 돌아갈 수 있도록 합니다.
- 개별 웨이포인트를 클릭하고 다음 매개변수를 지정하여 Add Actions(작업을 추가 )합니다: Stay: 2초(이미지 흐림 방지); 틸트 카메라: -90°(천저); 사진을 찍습니다.
- 적절한 이름으로 임무를 저장합니다.
- 추가 사이트에 대해 이 과정을 반복합니다.
2. 현장 데이터 수집 및 후처리
- 연구 지역에서 관찰되거나 예상되는 식생 기록
- 이미지를 획득하기 전에 연구 영역 내에서 관찰된 식생 목록을 만듭니다. 이것은 나중에 사진이 부착된 신분증을 식별하는 데 도움이 되도록 손으로 쓴 시트나 디지털 양식에 수행할 수 있습니다. 현장에서 관찰되지 않더라도 해당 지역에서 예상될 수 있는 종(예: 매립 종자 혼합물 내의 종)을 목록에 포함하는 것이 도움이 될 수 있습니다18.
- 지상 기반 이미지 획득
- 카메라를 수직 모노포드에 부착하고 카메라를 약 60° 아래로 향하게 합니다. 이미지의 영역은 카메라의 렌즈 및 해상도(메가픽셀) 사양을 사용하고 모노포드를 표준 높이로 설정하여 결정할 수 있습니다. 카메라 사양과 결합된 모노포드의 높이에 따라 접지 샘플 거리(GSD)가 결정됩니다. 이 연구에서는 12.1메가픽셀 카메라를 사용하고 모노포드를 지면에서 1.3m 높이로 일정하게 설정하여 ~0.3mm GSD18에서 천저 이미지를 얻었습니다.
- 모노포드를 앞으로 기울여 카메라 렌즈가 천저 위치에 있고 각진 모노포드가 이미지에서 볼 수 없도록 합니다.
- 모노포드의 높이 또는 렌즈의 줌을 조정하여 1m2 프레임리스 플롯 크기(또는 원하는 다른 플롯 크기)를 얻을 수 있습니다. 가장 일반적인 4:3 종횡비 카메라의 경우 플롯 너비가 115cm이면1m2 의 이미지 시야가 생성됩니다. 바닥에 프레임을 놓을 필요가 없습니다. 전체 이미지가 플롯입니다. 이를 위해 렌즈의 줌을 조정하는 경우 페인터 테이프를 사용하여 줌 설정이 실수로 변경되는 것을 방지하십시오.
- 가능하면 카메라를 셔터 우선 모드로 설정하고 셔터 속도를 최소 1/125초로 설정하여 이미지가 흐려지는 것을 방지하십시오. 바람이 많이 불면 더 빠릅니다.
- 최적화된 경로 순서에서 첫 번째 점을 찾습니다.
- 모노포드를 지점 1의 지면에 놓고 카메라가 천저 방향이 될 때까지 모노포드를 기울입니다. 작업자의 그림자가 이미지에 없는지 확인합니다. 모션 블러를 방지하기 위해 카메라를 흔들리지 않게 잡으십시오. 이미지를 획득합니다.
참고: 이 단계에서는 원격 트리거 케이블이 유용합니다. - 성공적인 데이터 캡처를 위해 이미지 품질을 확인하십시오.
- 최적화된 경로 순서의 다음 지점으로 이동하고 획득 단계를 반복합니다.
- UAS 이미지 획득
- UAS를 발사하기 전에 연구 지역을 간략하게 정찰하여 비행 경로 내에 물리적 장애물이 없는지 확인하십시오. 이 정찰 훈련은 UAS를 발사할 상당히 평평한 지역을 찾는 데에도 유용합니다.
- UAS 비행에 적합한 기상 조건: 건조하고 맑은 날(가시성 >4.8km), 적절한 조명, 최소한의 바람(<17노트) 및 0 °C–37 °C 사이의 온도.
- 법적 절차를 따릅니다. 예를 들어, 미국에서는 연방 항공국(Federal Aviation Administration) 정책을 따라야 합니다.
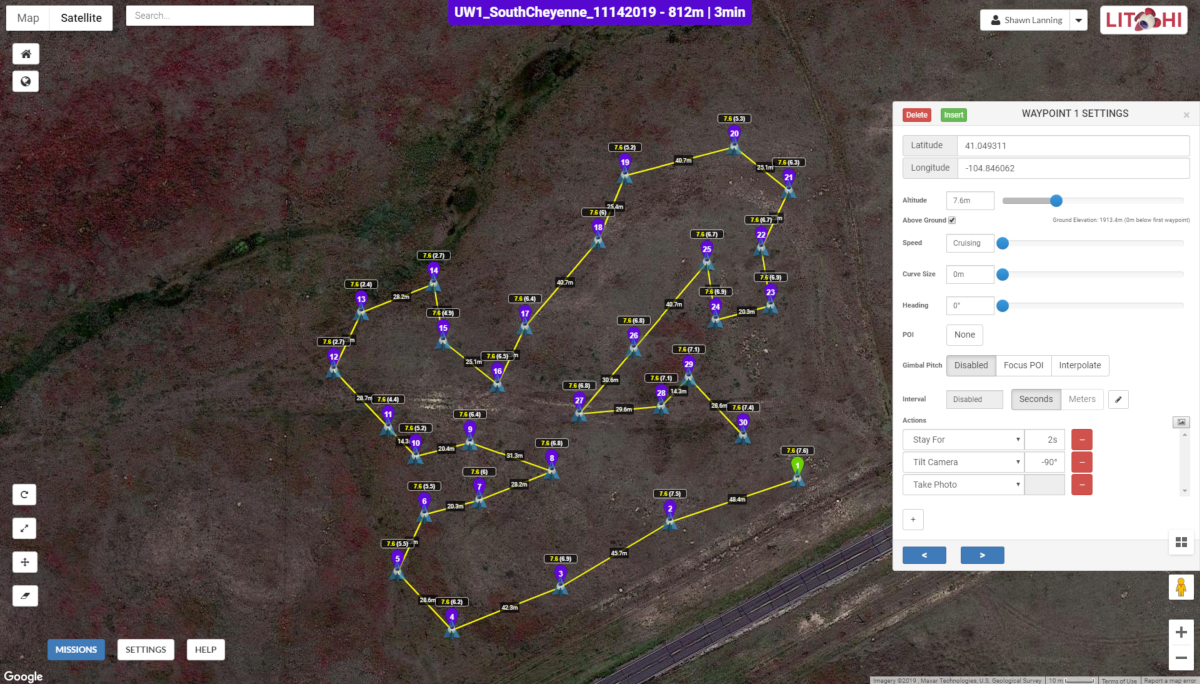
- Mission Hub 소프트웨어(그림 2)와 모바일 장치를 통해 액세스할 수 있는 임무 수행 애플리케이션(그림 3)을 활용합니다.
- 1.4단계에 설명된 대로 각 BAS 지점에서 UAS 이미지를 수집합니다.
- 위치를 변경하기 전에 모바일 장치를 사용하여 모든 이미지를 획득했는지 확인합니다.

그림 2: 미션 허브의 사용자 인터페이스. 지도는 연구 사이트 중 하나를 가로지르는 일련의 30개 BAS 지점을 따라 드론 비행 경로를 보여주며, 팝업 창에는 각 웨이포인트의 이미지 획득 매개변수가 표시됩니다. 그림 2 는 사이트 1과 관련이 있지만 사이트 2와 모양이 비슷합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: Android 스마트폰에서 실행되는 Litchi의 임무 실행 애플리케이션의 웨이포인트 비행 임무. 고유한 웨이포인트 ID는 자주색으로 표시되며 연구 영역의 다양한 지점에서 이미지가 촬영된 상대적 순서를 나타냅니다. 7(6)과 같은 각 웨이포인트의 숫자는 이미지가 촬영된 지면 위의 높이(첫 번째 숫자)와 홈 포인트 또는 드론 발사 지점 위의 높이(두 번째 숫자)의 정수 값을 나타냅니다. 지도에 레이블이 지정된 연속적인 웨이포인트 사이의 거리를 확인합니다. 그림 3 은 사이트 1과 관련이 있지만 사이트 2와 모양이 비슷합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
- 지상 수준의 이미지 후처리.
참고: 지침은 튜토리얼 섹션의 www.SamplePoint.org 에서 확인할 수 있습니다. 추가 .pdf 파일이 첨부되어 있습니다.- USB 케이블 또는 SD 카드를 사용하여 컴퓨터에 이미지를 다운로드합니다.
- 이미지가 올바른 위치에서 촬영되었는지 확인합니다. 지오태깅된 이미지 내의 메타데이터를 기반으로 GIS 소프트웨어에 이미지를 배치하기 위한 다양한 소프트웨어가 존재합니다.
- 여러 연구 영역에서 이미지를 획득한 경우 이미지 분석을 위해 별도의 폴더에 저장합니다.
- UAS 이미지 후처리
- 착탈식 microSD 카드에 저장된 이미지를 UAS에서 컴퓨터로 전송합니다.
- 2.4.2 및 2.4.3단계를 반복합니다.
3. 이미지 분석
참고: 모든 단계는 www.SamplePoint.org 의 '튜토리얼' 섹션에서 찾을 수 있습니다. 추가 'tutorial.pdf' 파일이 첨부되어 있습니다.
- SamplePoint에서 Options(옵션) | 데이터베이스 마법사 | 데이터베이스를 생성/채웁니다.
- 연구 영역에 따라 데이터베이스 이름을 지정합니다.
- 원하는 연구 영역 샘플이 포함된 폴더로 이동하여 분류할 샘플을 선택합니다.
- 완료를 클릭합니다.
- Options(옵션) | 데이터베이스를 선택하고 SamplePoint가 이미지 선택에 따라 생성하는 *.xls 파일(이미지에 있음)을 선택합니다.
- SamplePoint에서 프롬프트를 표시할 때 데이터베이스에서 올바른 수의 이미지가 선택되었는지 확인합니다.
- 각 이미지 내에서 분석할 원하는 픽셀 수를 선택합니다. 이것은 그리드 패턴으로 또는 무작위로 수행할 수 있습니다. 이 연구에서는 6 x 6 그리드를 사용하여 총 36개의 픽셀을 선택했지만, 분류를 위해 원하는 측정 정밀도에 따라 이미지당 더 많거나 더 적은 픽셀을 분류할 수 있습니다. 최근 연구에 따르면 이미지당 20-30픽셀이 넓은 영역을 샘플링하는 데 적합하다31. grid 옵션은 이미지가 다시 분석될 때 픽셀이 동일한 위치에 있도록 하는 반면, random 옵션은 이미지가 다시 로드될 때마다 픽셀을 무작위로 생성합니다.
- 종 분류를 위한 사용자 정의 버튼 파일을 만듭니다. 이 목록은 이미지 획득 전에 현장에 기록된 식생 목록으로부터 생성될 수 있으며, 또는 연구 영역과 관련된 다른 정보(예: 매립지의 종자 혼합 목록 또는 생태 현장 설명 정보 등)를 기반으로 할 수 있습니다. Bare Ground 또는 Soil 및 Litter 또는 Rock과 같이 발생할 수 있는 기타 잠재적인 비식생 항목에 대한 버튼이 생성되었는지 확인합니다. 분석가가 나중에 종을 분류할 수 있도록 알 수 없음 버튼을 만드는 것이 좋습니다. SamplePoint의 주석 상자는 이 옵션을 사용한 픽셀을 메모하는 데 사용할 수 있습니다. 또한 이미지 해상도가 종 수준으로 분류할 만큼 충분히 높지 않은 경우 기능 그룹(예: Grass, Forb, Shrub)에 대한 버튼을 만드는 것이 좋습니다.
- 빨간색 십자선이 대상으로 하는 이미지 픽셀을 설명하는 분류 버튼을 클릭하여 이미지 분석을 시작합니다. SamplePoint에서 "That's all the points. 다음 이미지를 클릭하십시오." 데이터베이스 내의 모든 이미지에 대해 이 작업을 반복합니다.
참고: 확대/축소 기능을 사용하여 분류에 도움을 줄 수 있습니다. - 데이터베이스의 모든 이미지가 완전히 분석되면 SamplePoint는 "모든 이미지를 소진했습니다"라는 메시지를 표시합니다. 이 시점에서 OK(확인 )를 선택한 다음 Options(옵션) | 통계 파일을 만듭니다.
- 데이터베이스가 포함된 폴더로 이동하여 방금 만든 *.csv 파일을 열어 모든 이미지의 데이터가 저장되었는지 확인합니다.
4. 통계 분석
- 부위 간의 차이를 확인하기 위한 카이제곱 분석
- 두 사이트에서 동일한 수의 이미지(1차 샘플링 단위)와 픽셀(2차 샘플링 단위)이 수집 및 분석되기 때문에 두 사이트 간의 비교는 다항 설계의 산물로 간주될 수 있습니다.
- 3.11단계에서 만든 *.csv 파일을 사용하여 각 분류 범주에 대해 분류된 포인트의 합계를 계산합니다.
- 점 합계에 대한 카이제곱 분석을 수행합니다. 사이트 1 및 사이트 2가 서로 유사하다면, 각 커버 타입으로 분류된 대략 동일한 수의 픽셀이 두 사이트(18)에서 명백할 것이다.
- UAS와 지상 수준 이미지를 비교하기 위한 회귀 분석
- 3.11단계에서 생성한 *.csv 파일을 사용하여 각 이미지의 평균 백분율 커버를 복사하여 붙여넣고 UAS 이미지 데이터를 지면 이미지 데이터와 정렬합니다.
- 데이터베이스 프로그램에서 회귀 분석을 수행합니다.
결과
UAS 이미지 획득은 지상 기반 이미지 수집 시간의 절반도 안 걸렸으며, 지상 기반 이미지에서는 분석 시간이 약간 짧았습니다(표 1). 지상 기반 이미지는 해상도가 더 높았기 때문에 더 짧은 시간에 분석되었을 수 있습니다. 기지 간 보행 경로 시간의 차이는 시작점과 끝점(발사장)이 기지 2보다 기지 1에 더 가깝기 때문일 수 있습니다(그림 1
토론
천연자원 모니터링의 중요성은 오래 전부터 인식되어 왔다14. 글로벌 환경 문제에 대한 관심이 높아짐에 따라 시간과 비용 효율적인 신뢰할 수 있는 모니터링 기술을 개발하는 것이 점점 더 중요해지고 있습니다. 이전의 여러 연구에 따르면 이미지 분석은 시간, 비용, 유효하고 방어 가능한 통계 데이터 제공 측면에서 기존 식생 모니터링 기술에 비해 유...
공개
저자는 이해 상충이 없음을 선언합니다. 이 연구에 사용된 소프트웨어는 저자들이 오픈 소스로 또는 기관의 허가를 통해 사용할 수 있었습니다. 이 연구에 사용된 소프트웨어의 후원을 받는 저자는 없으며 유사한 연구를 수행할 수 있는 다른 소프트웨어 프로그램을 사용할 수 있음을 인정합니다.
감사의 말
이 연구는 Wyoming Reclamation and Restoration Center와 Jonah Energy, LLC의 대다수 자금 지원을 받았습니다. Trimble Juno 5 호기에 자금을 지원해 주신 Warren Resources와 Escelara Resources에 감사드립니다. 와이오밍의 식생 모니터링 자금을 지속적으로 지원해 주신 Jonah Energy, LLC에 감사드립니다. 이 연구에 사용된 UAS 장비를 제공한 와이오밍 지리 정보 과학 센터(Wyoming Geographic Information Science Center)에 감사드립니다.
자료
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
참고문헌
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524 (2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7 Available from: https://CRAN.R-project.org/package=TSP (2019)
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- rgdal: bindings for geospatial data abstraction library. R package version 1.2-7 Available from: https://CRAN.R-project.org/package=rgdal (2017)
- SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3 Available from: https://CRAN.R-project.org/package=SDraw (2016)
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049 (2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041 (2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유