
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
צילומי מערכת אווירית בלתי מאוישת בגובה הקרקע בשילוב עם דגימה מאוזנת מרחבית ואופטימיזציה של מסלול לניטור צמחיית מרעה
In This Article
Summary
הפרוטוקול המוצג במאמר זה משתמש באופטימיזציה של מסלול, דגימת קבלה מאוזנת ותמונות של מערכת כלי טיס בלתי מאוישים (UAS) בגובה הקרקע כדי לנטר ביעילות את הצמחייה במערכות אקולוגיות של שטחי מרעה. תוצאות מתמונות שהתקבלו משיטות קרקע וכלי טיס בלתי מאוישים משווים.
Abstract
מערכות אקולוגיות של שטחי מרעה מכסות 3.6 מיליארד דונם ברחבי העולם עם 239 מיליון דונם הממוקמים בארצות הברית. מערכות אקולוגיות אלו קריטיות לשמירה על שירותי מערכת אקולוגית גלובלית. ניטור הצמחייה במערכות אקולוגיות אלה נדרש כדי להעריך את בריאות המרעה, לאמוד את התאמת בתי הגידול לחיות בר ובעלי חיים מבויתים, להילחם בעשבים פולשים ולהבהיר שינויים סביבתיים זמניים. למרות שמערכות אקולוגיות של שטחי מרעה מכסות שטחים נרחבים, טכניקות ניטור מסורתיות לרוב גוזלות זמן ואינן יעילות, נתונות להטיית צופים גבוהה, ולעתים קרובות חסרות מידע מרחבי מספק. ניטור צמחייה מבוסס תמונה מהיר יותר, מייצר רשומות קבועות (כלומר, תמונות), עשוי לגרום להפחתת הטיית הצופה, וכולל מטבעו מידע מרחבי הולם. עיצובי דגימה מאוזנים מרחבית מועילים בניטור משאבי טבע. מוצג פרוטוקול ליישום עיצוב דגימה מאוזן מרחבית המכונה דגימת קבלה מאוזנת (BAS), עם תמונות המתקבלות ממצלמות קרקעיות ומערכות אוויריות בלתי מאוישות (UAS). בנוסף נעשה שימוש באלגוריתם אופטימיזציה של מסלולים כדי לפתור את 'בעיית איש המכירות הנודד' (TSP) כדי להגדיל את יעילות הזמן והעלויות. בעוד שניתן לרכוש תמונות כטב"ם פי 2-3 מהר יותר מתמונות כף יד, שני סוגי התמונות דומים זה לזה מבחינת דיוק ודיוק. לבסוף, נדונים היתרונות והחסרונות של כל שיטה וניתנות דוגמאות ליישומים פוטנציאליים לשיטות אלה במערכות אקולוגיות אחרות.
Introduction
מערכות אקולוגיות של שטחי מרעה מקיפות שטחים עצומים, המכסים 239 מיליון דונם בארצות הברית ו-3.6 מיליארד דונם ברחבי העולם1. שטחי מרעה מספקים מגוון רחב של שירותי מערכת אקולוגית וניהול שטחי מרעה כרוך בשימושי קרקע מרובים. במערב ארה"ב, שטחי מרעה מספקים בית גידול לחיות בר, אגירת מים, קיבוע פחמן ומספוא לבעלי חיים ביתיים2. שטחי מרעה נתונים להפרעות שונות, כולל מינים פולשים, שריפות, פיתוח תשתיות והפקת משאבי טבע (למשל, נפט, גז ופחם)3. ניטור צמחייה הוא קריטי לשמירה על ניהול משאבים בשטחי מרעה ומערכות אקולוגיות אחרות ברחבי העולם 4,5,6. ניטור צמחייה בשטחי מרעה משמש לעתים קרובות להערכת בריאות המרעה, התאמת בתי הגידול למיני חיות בר, ולקטלוג שינויים בנופים עקב מינים פולשים, שריפות והפקת משאבי טבע 7,8,9,10. בעוד שהמטרות של תוכניות ניטור ספציפיות עשויות להשתנות, תוכניות ניטור המתאימות לצרכים של בעלי עניין מרובים תוך היותן אמינות סטטיסטית, ניתנות לחזרה וחסכוניותהן רצויות 5,7,11. למרות שמנהלי קרקעות מכירים בחשיבות הניטור, הוא נתפס לעתים קרובות כלא מדעי, לא כלכליומכביד.
באופן מסורתי, ניטור שטחי מרעה נערך במגוון שיטות, כולל הערכה עינית או חזותית10, מסגרות דאובנמיר12, תרשיםחלקה 13 ויירוט נקודת קו לאורך רוחבי צמחייה14. בעוד שהערכה עינית או חזותית חסכונית בזמן, היא נתונה להטיית צופה גבוהה15. שיטות מסורתיות אחרות, למרות שגם הן כפופות להטיית צופה גבוהה, לרוב אינן יעילות בשל דרישות הזמן והעלות שלהן 6,15,16,17. הזמן הנדרש ליישום רבות מהשיטות המסורתיות הללו הוא לעתים קרובות מכביד מדי, מה שמקשה על השגת גדלי מדגם תקפים סטטיסטית, וכתוצאה מכך הערכות אוכלוסייה לא מהימנות. שיטות אלה מיושמות לעתים קרובות על סמך נוחות ולא באופן סטוכסטי, כאשר המשקיפים בוחרים היכן הם אוספים נתונים. בנוסף, מיקומי הדגימה המדווחים והממשיים שונים לעתים קרובות, מה שגורם לבלבול עבור מנהלי קרקעות ובעלי עניין אחרים המסתמכים על נתוני ניטור צמחייה18. מחקר שנערך לאחרונה הוכיח כי ניטור צמחייה מבוסס תמונה הוא חסכוני בזמןובעלות 6,19,20. הגדלת כמות הנתונים שניתן לדגום באזור נתון בפרק זמן קצר אמורה לשפר את האמינות הסטטיסטית של הנתונים בהשוואה לטכניקות מסורתיות שגוזלות זמן רב יותר. תמונות הן רשומות קבועות הניתנות לניתוח על ידי מספר צופים לאחר איסוף נתוני שטח6. בנוסף, מצלמות רבות מצוידות במערכות מיקום גלובליות (GPS), כך שניתן לתייג תמונות גיאוגרפית עם מיקום איסוף18,20. שימוש בנקודות דגימה שנוצרו על ידי מחשב, הממוקמות במדויק בשטח, אמור להפחית את הטיית הצופה בין אם התמונה נרכשת באמצעות מצלמת כף יד או על ידי מערכת אווירית בלתי מאוישת, מכיוון שהוא מפחית את נטייתו של הצופה הבודד להשתמש בדעתו היכן יש למקם את מיקומי הדגימה.
מלבד היותו גוזל זמן, יקר ונתון להטיית צופים גבוהה, ניטור משאבי טבע מסורתי לעתים קרובות אינו מצליח לאפיין כראוי שטחי מרעה הטרוגניים בשל גודל מדגם נמוך ומיקומי דגימה מרוכזים21. עיצובי דגימה מאוזנים מרחבית מפיצים את מיקומי הדגימה באופן שווה יותר על פני אזור עניין כדי לאפיין טוב יותר את משאבי הטבע 21,22,23,24. עיצובים אלה יכולים להפחית את עלויות הדגימה, מכיוון שנדרשים גדלי מדגם קטנים יותר כדי להשיג דיוק סטטיסטי ביחס לדגימה אקראית פשוטה25.
בשיטה זו, עיצוב דגימה מאוזן מרחבית המכונה דגימת קבלה מאוזנת (BAS)22,24 משולב עם ניטור מבוסס תמונה כדי להעריך את צמחיית המרעה. נקודות BAS מפוזרות בצורה אופטימלית על פני אזור העניין26. עם זאת, אין בכך כדי להבטיח כי יוזמנו נקודות במסלול אופטימלי לביקור20. לכן, נקודות BAS מסודרות באמצעות אלגוריתם אופטימיזציה של מסלול הפותר את בעיית איש המכירות הנודד (TSP)27. ביקור בנקודות בסדר זה קובע נתיב אופטימלי (כלומר, מרחק מינימלי) המחבר בין הנקודות. נקודות BAS מועברות לתוכנת מערכת מידע גיאוגרפית (GIS) ולאחר מכן ליחידת איסוף נתונים כף יד המצוידת ב-GPS. לאחר איתור נקודות ה-BAS, מצלמים את התמונות באמצעות מצלמת GPS וכן מערכת אווירית בלתי מאוישת המופעלת באמצעות תוכנת טיסה. עם כניסתו לשטח, טכנאי הולך לכל נקודה כדי לרכוש תמונות מצלמה של 1 מ"ר המותקנות על מונופוד עם מרחק דגימת קרקע (GSD) של 0.3 מ"מ בכל נקודת BAS בזמן שהמל"ט טס לאותן נקודות ורוכש תמונות GSD של 2.4 מ"מ. לאחר מכן, נתוני כיסוי הצמחייה נוצרים באמצעות 'SamplePoint'28 כדי לסווג ידנית 36 נקודות/תמונה. נתוני כיסוי הצמחייה שנוצרו מניתוח תמונות מפלס הקרקע והמל"טים מושווים וכן זמני רכישה מדווחים עבור כל שיטה. במחקר המייצג נעשה שימוש בשתי חלקות מרעה סמוכות בשטח של 10 דונם. לבסוף, נדונים יישומים אחרים של שיטה זו וכיצד ניתן לשנות אותה עבור פרויקטים עתידיים או פרויקטים במערכות אקולוגיות אחרות.
Access restricted. Please log in or start a trial to view this content.
Protocol
1. הגדרת אזור לימוד, יצירת נקודות דגימה ונתיב נסיעה, והכנה לשטח
- הגדרת תחום המחקר
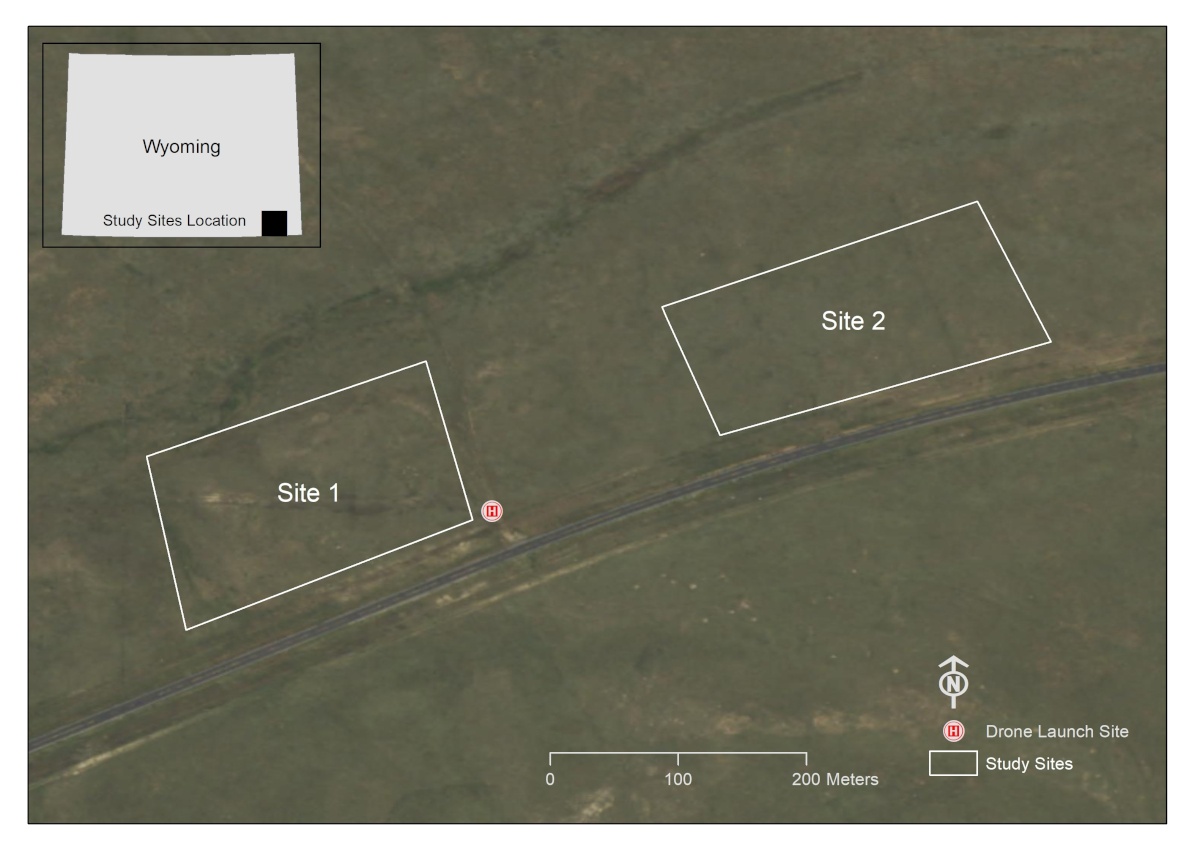
- השתמש בתוכנת GIS כדי לצייר גרפיקה מצולע סביב האזור המעניין. מחקר זה נערך על שתי חלקות של 10 דונם בתוך הקצאת מרעה במחוז לאראמי, ויסקונסין, ארה"ב (איור 1).
- ודא שאותם אזורים שאינם מיועדים להיות במסגרת המדגם אינם נכללים במצולע (למשל, גופי מים, מבני בניין, כבישים וכו'). זה יבטיח שלא יצולמו תמונות של אזורים אלה מאוחר יותר.
- המר את גרפיקת המצולע לתכונת קובץ צורה (.shp) בתוכנת GIS וודא שקובץ הצורה נוצר במערכת הקואורדינטות הרצויה.

איור 1: תיאור תחומי העניין של המחקר. מיקום זה נמצא על הקצאת מרעה דרומית לשאיין במחוז לאראמי, ויומינג, ארה"ב (מקור התמונות: Wyoming NAIP Imagery 2017). אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
- יצירת נקודות BAS ואופטימיזציה של נתיב הנסיעה
הערה: הקוד מצורף כ-'Supplemental_Code.docx'.- השתמש בחבילת R 'rgdal'29 כדי להמיר את מצולע ה-GIS לקובץ קריא של תוכנית R.
- השתמש בחבילת R 'SDraw'30 כדי ליצור את המספר הרצוי של נקודות BAS. מחקר זה השתמש ב-30 נקודות BAS לכל אזור מחקר, אם כי יש לערוך מחקר עתידי כדי לקבוע את עוצמת הדגימה האופטימלית עבור אזורים בגדלים שונים ובהרכב צמחייה שונים.
- השתמש בחבילת R 'TSP'27 כדי להזמין את נקודות ה-BAS. ביקור בנקודות בסדר זה ממזער את הזמן הנדרש להשגת דגימות בנקודות ה-BAS.
- הכנה לרכישת תמונות כף יד
- השתמש בחבילת R 'rgdal' כדי להעביר את הנקודות משלב 1.2.1 בחזרה לתוכנית GIS.
- ערוך את טבלת התכונות של קובץ הצורה כך ששדה מזהה הנקודה ישקף במדויק את סדר הנתיבים הממוטב.
- העבר את מצולע ה-GIS וקובץ הנקודה לתוכנת GIS הפועלת על יחידת כף יד.
- ודא שמערכת הקואורדינטות המוקרנת הנכונה לאזור העניין קיימת.
- הכנה לרכישת תמונות כטב"ם
- השתמש בחבילת R 'rgdal' כדי להעביר את הנקודות משלב 1.2.1 בחזרה לתוכנת GIS.
- בתוכנת GIS, השתמש בכלי Add XY Coordinates כדי ליצור ולאכלס שדות קו רוחב וקו אורך בטבלת תכונות נקודת הציון.
- ייצא את טבלת תכונות נקודת הציון המכילה עמודות קו רוחב, קו אורך ו-TSP לתבנית קובץ *.csv.
- פתח את הקובץ *.csv בחבילת תוכנה מתאימה.
- מיין נקודות ציון לפי מזהה TSP.
- פתח את אפליקציית Mission Hub.
- צור נקודת ציון שרירותית ב-Mission Hub.
- ייצא נקודת ציון שרירותית כקובץ *.csv.
- פתח את קובץ *.csv בתוכנית גיליון אלקטרוני ומחק כותרות עמודות שרירותיות של נקודות ציון.
- העתק זוגות קואורדינטות של נקודות ציון ממוינות ב-TSP משלב 1.2.3 לעמודות רלוונטיות ב-*.csv file משלב 1.4.8.
- ייבא קובץ *.csv משלב 1.4.10 ל-Mission Hub כמשימה חדשה.
- הגדר את ההגדרות.
- סמן את התיבה השתמש בגובה מקוון .
- ציין את מצב הנתיב כקווים ישרים.
- ציין את פעולת הסיום כ-RTH כדי לאפשר לרחפן לחזור הביתה לאחר השלמת המשימה.
- לחץ על נקודות ציון בודדות והוסף פעולות על ידי ציון הפרמטרים הבאים: שהייה: 2 שניות (כדי למנוע טשטוש תמונה); מצלמת הטיה: -90° (Nadir); צלם.
- שמור משימה עם שם מתאים.
- חזור על התהליך עבור אתרים נוספים.
2. איסוף נתונים בשטח ועיבוד לאחר
- תיעוד צמחייה שנצפתה או צפויה באזור המחקר
- לפני רכישת תמונות, צור רשימה של צמחייה שנצפתה באזור המחקר. ניתן לעשות זאת על גבי גיליון בכתב יד או על גבי טופס דיגיטלי כדי לסייע בזיהוי תמונה מאוחר יותר. זה עשוי להיות מועיל לכלול מינים שסביר להניח שצפויים באזור במלאי גם אם הם לא נצפים בשטח (למשל, מינים בתוך תערובות זרעי טיוב)18.
- רכישת תמונות מהקרקע
- חבר מצלמה למונופוד אנכי וכוון את המצלמה כלפי מטה כ-60°. ניתן לקבוע את שטח התמונה באמצעות מפרט העדשה והרזולוציה (מגה-פיקסל) של המצלמה והגדרת המונופוד לגובה סטנדרטי. גובה המונופוד יחד עם מפרט המצלמה יקבעו את מרחק דגימת הקרקע (GSD). במחקר זה, נעשה שימוש במצלמת 12.1 מגה-פיקסל והמונופוד הוגדר בגובה קבוע של 1.3 מ' מעל פני הקרקע כדי לקבל תמונות Nadir ב-~0.3 מ"מ GSD18.
- הטה את המונופוד קדימה כך שעדשת המצלמה תהיה במצב Nadir, והמונופוד הזוויתי לא יהיה ניתן לצפייה בתמונה.
- התאם את גובה המונופוד או את הזום בעדשה כדי להשיג גודל עלילה ללא מסגרת של 1 מ"ר (או גודל עלילה רצוי אחר). עבור המצלמות הנפוצות ביותר עם יחס גובה-רוחב של 4:3, רוחב עלילה של 115 ס"מ מניב שדה ראייה של תמונה של 1 מ"ר . אין צורך להציב מסגרת על הקרקע; התמונה כולה היא העלילה. אם מכוונים את הזום בעדשה כדי להשיג זאת, השתמש בסרט צייר כדי למנוע שינויים מקריים בהגדרת הזום.
- במידת האפשר, הגדר את המצלמה למצב עדיפות תריס והגדר את מהירות התריס ל-1/125 שניות לפחות כדי למנוע טשטוש בתמונה; מהר יותר אם יש רוח.
- אתר את הנקודה הראשונה בסדר הנתיבים הממוטב.
- הנח את המונופוד על הקרקע בנקודה 1 והטה את המונופוד עד שהמצלמה תהיה בכיוון נדיר. ודא שהצל של המפעיל אינו בתמונה. החזק את המצלמה יציבה כדי למנוע טשטוש תנועה. רכוש את התמונה.
הערה: כבל הדק מרחוק שימושי לשלב זה. - בדוק את איכות התמונה כדי להבטיח לכידת נתונים מוצלחת.
- נווט לנקודה הבאה בסדר הנתיב הממוטב וחזור על שלבי הרכישה.
- רכישת תמונות כטב"ם
- לפני שיגור המל"ט, ערכו סיור קצר של אזור המחקר כדי לוודא שאין מכשולים פיזיים בנתיב הטיסה. תרגיל סיור זה שימושי גם לאיתור אזור שטוח למדי שממנו ניתן לשגר את המל"ט.
- ודא שתנאי מזג האוויר מתאימים להטסת הכטב"ם: יום יבש ובהיר (ראות של >4.8 ק"מ) עם תאורה נאותה, רוח מינימלית (<17 קשר) וטמפרטורות בין 0 מעלות צלזיוס ל-37 מעלות צלזיוס.
- פעל לפי הפרוטוקולים המשפטיים. לדוגמה, בארה"ב, יש לעקוב אחר מדיניות מינהל התעופה הפדרלי.
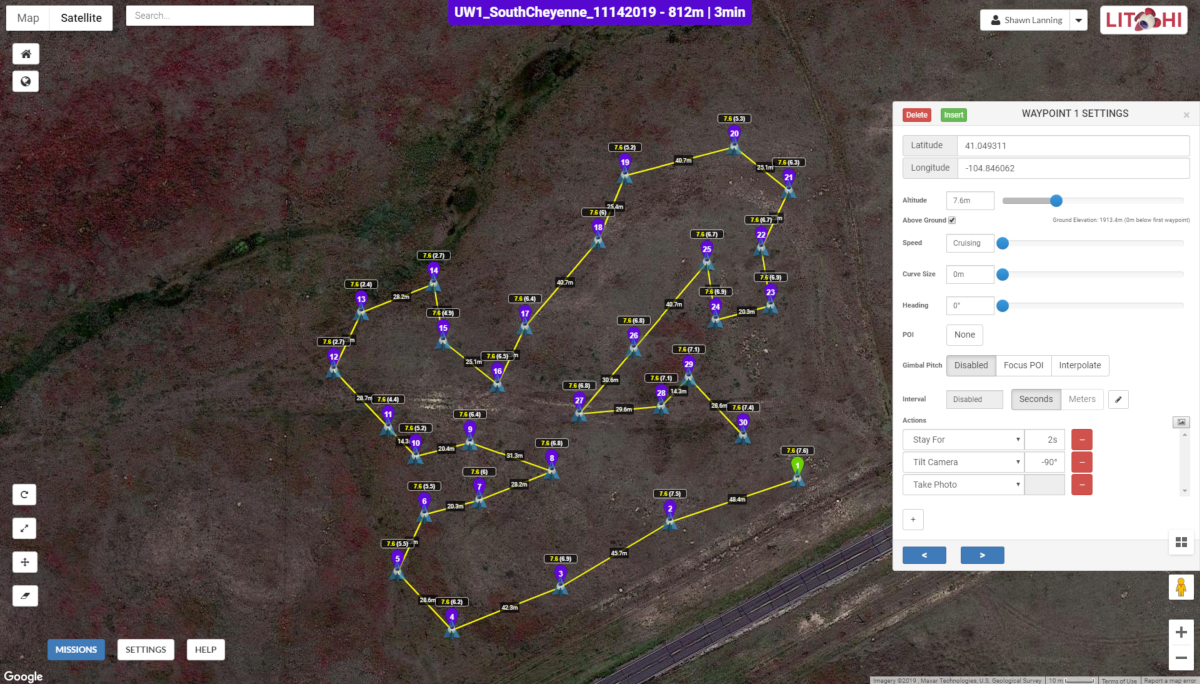
- השתמש בתוכנת Mission Hub (איור 2) וביישום ביצוע משימה הנגיש דרך התקנים ניידים (איור 3).
- אסוף תמונות של כטב"מים בכל נקודת BAS כמתואר בשלב 1.4.
- ודא שכל התמונות נרכשו באמצעות המכשיר הנייד לפני שינוי המיקום.

איור 2: ממשק המשתמש של Mission Hub. המפה מתארת את נתיב טיסת הרחפן לאורך סדרה של 30 נקודות BAS על פני אחד מאתרי המחקר, בעוד שהחלון המוקפץ מציג פרמטרים של רכישת תמונה בכל נקודת ציון. איור 2 הוא ספציפי לאתר 1, אם כי הוא דומה במראהו לאתר 2. אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}

איור 3: משימת טיסת נקודת ציון ביישום ביצוע המשימה של Litchi הפועל על סמארטפון אנדרואיד. מזהי נקודות ציון ייחודיים מוצגים בסגול ומייצגים את הסדר היחסי שבו צולמו תמונות בנקודות שונות באזור המחקר. המספרים בכל נקודת ציון, כגון 7(6), מציינים את הערכים השלמים של גבהים מעל הקרקע שבהם צולמו התמונות (מספר ראשון) וגבהים מעל נקודת הבית או אתר שיגור הרחפן (מספר שני). שימו לב למרחקים בין נקודות ציון עוקבות המסומנות במפה. איור 3 ספציפי לאתר 1, אם כי הוא דומה במראהו לאתר 2. אנא לחץ כאן לצפייה בגרסה גדולה יותר של איור זה.
{kind=link}
- עיבוד תמונה בגובה הקרקע.
הערה: הוראות הגעה זמינות ב-www.SamplePoint.org בסעיף ההדרכה; קובץ .pdf משלים מצורף.- הורד תמונות למחשב באמצעות כבל USB או כרטיס SD.
- ודא שהתמונות צולמו במקומות הנכונים. קיימות תוכנות שונות להצבת תמונות בתוכנת GIS על סמך המטא נתונים בתוך התמונות המתויגות גיאוגרפית.
- אם התמונות נרכשו במספר אזורי מחקר, אחסן אותן בתיקיות נפרדות לניתוח תמונה.
- עיבוד תמונה של כטב"ם
- העבר תמונות שנשמרו בכרטיס microSD נשלף מהמל"ט למחשב.
- חזור על שלבים 2.4.2 ו- 2.4.3.
3. ניתוח תמונות
הערה: ניתן למצוא את כל השלבים בסעיף 'הדרכה' ב-www.SamplePoint.org; מצורף קובץ 'tutorial.pdf' משלים.
- ב-SamplePoint, לחץ על Options | אשף מסד הנתונים | צור/אכלס מסד נתונים.
- תן שם למסד הנתונים על סמך אזור המחקר.
- נווט לתיקיה המכילה את דגימות אזור המחקר הרצויות ובחר את אלה שיש לסווג.
- לחץ על סיום.
- לחץ על אפשרויות | בחרו 'מסד נתונים ' ובחרו בקובץ *.xls ש-SamplePoint יוצרת בהתבסס על בחירת התמונה (זה יופיע בתמונה).
- ודא שהמספר הנכון של תמונות נבחרו במסד הנתונים כאשר תתבקש על-ידי SamplePoint.
- בחר את מספר הפיקסלים הרצוי לניתוח בכל תמונה. ניתן לעשות זאת בתבנית רשת או באופן אקראי. מחקר זה השתמש ברשת של 6 x 6 כדי לבחור בסך הכל 36 פיקסלים, אם כי ניתן לסווג יותר או פחות פיקסלים לתמונה בהתאם לדיוק המדידה הרצוי לסיווג. מחקר שנערך לאחרונה מצא ש-20-30 פיקסלים לתמונה מספיקים לדגימת שטחים גדולים31. אפשרות הרשת מבטיחה שהפיקסלים יהיו באותו מיקום אם התמונה מנותחת מחדש, ואילו האפשרות האקראית תיצור פיקסלים באופן אקראי בכל פעם שתמונה נטענת מחדש.
- צור קובץ כפתור מותאם אישית לסיווג מינים. רשימה זו יכולה להיווצר מרשימת הצמחייה שתועדה בשטח לפני רכישת התמונה, או שהיא יכולה להתבסס על מידע אחר הרלוונטי לאזור המחקר (למשל, רשימת תערובת זרעים באתרים משוחזרים, או מידע על תיאור אתר אקולוגי וכו'). ודא שנוצר כפתור עבור אדמה חשופה או אדמה ופריטים פוטנציאליים אחרים שאינם צמחייה שעלולים להיתקל בהם, כגון פסולת או סלע. מומלץ ליצור כפתור לא ידוע כדי לאפשר לאנליסט לסווג מינים במועד מאוחר יותר. ניתן להשתמש בתיבת ההערה ב- SamplePoint כדי לציין את הפיקסלים שהשתמשו באפשרות זו. בנוסף, אם רזולוציית התמונה אינה גבוהה מספיק כדי לסווג לרמות מינים, יצירת כפתורים לקבוצות פונקציונליות (למשל, דשא, פורב, שיח) מועילה.
- התחל לנתח את התמונות על ידי לחיצה על כפתור הסיווג המתאר את פיקסל התמונה הממוקד על ידי הכוונת האדומה. חזור על פעולה זו עד ש-SamplePoint יבקש "זה כל הנקודות. לחץ על התמונה הבאה." חזור על פעולה זו עבור כל התמונות במסד הנתונים.
הערה: ניתן להשתמש בתכונת הזום כדי לסייע בסיווג. - כאשר כל התמונות במסד הנתונים מנותחות במלואן, SamplePoint תבקש "מיצית את כל התמונות". בשלב זה, בחר אישור ולאחר מכן לחץ על אפשרויות | צור קבצי סטטיסטיקה.
- עבור אל התיקיה המכילה את מסד הנתונים ופתח את קובץ *.csv שנוצר זה עתה כדי להבטיח שהנתונים עבור כל התמונות מאוחסנים.
4. ניתוח סטטיסטי
- ניתוחי חי בריבוע לקביעת הבדלים בין אתרים
- מכיוון שאותו מספר של תמונות (יחידות דגימה ראשוניות) ופיקסלים (יחידות דגימה משניות) נאספים ומנותחים בשני האתרים, ההשוואה בין שני האתרים יכולה להיחשב כתוצר של עיצוב רב-נומיאלי.
- באמצעות קובץ *.csv שנוצר בשלב 3.11, חשב את סכום הנקודות המסווגות עבור כל קטגוריית סיווג.
- בצע ניתוח חי בריבוע על סכומי הנקודות. אם אתר 1 ואתר 2 דומים זה לזה, מספר שווה בערך של פיקסלים המסווגים לכל סוג כיסוי יהיה ניכר בשני האתרים18.
- רגרסיה להשוואת כטב"מים לעומת תמונות בגובה הקרקע
- באמצעות *.csv files שנוצרו בשלב 3.11, העתק והדבק את אחוז הכיסוי הממוצע מכל תמונה ויישר את נתוני תמונת הכטב"ם עם נתוני התמונה ברמת הקרקע.
- ביצוע ניתוח רגרסיה בתוכנית מסד נתונים.
Access restricted. Please log in or start a trial to view this content.
תוצאות
רכישת תמונות כטב"מים לקחה פחות ממחצית מהזמן של איסוף תמונות קרקעיות, בעוד שזמן הניתוח היה מעט פחות עם תמונות קרקעיות (טבלה 1). תמונות קרקעיות היו ברזולוציה גבוהה יותר, וזו כנראה הסיבה שהן נותחו בפחות זמן. ההבדלים בזמני שבילי ההליכה בין אתרים נבעו ככל הנראה מנקודו?...
Access restricted. Please log in or start a trial to view this content.
Discussion
החשיבות של ניטור משאבי טבע הוכרה זה מכבר14. עם תשומת לב מוגברת לסוגיות סביבתיות גלובליות, פיתוח טכניקות ניטור אמינות וחסכוניות בזמן ובעלות הוא חשוב יותר ויותר. מספר מחקרים קודמים הראו כי ניתוח תמונה משתווה לטובה לטכניקות ניטור צמחייה מסורתיות מבחינת זמן, על?...
Access restricted. Please log in or start a trial to view this content.
Disclosures
המחברים מצהירים שאין ניגוד עניינים. התוכנה ששימשה במחקר זה הייתה זמינה למחברים כקוד פתוח או באמצעות אישורים מוסדיים. אף מחבר אינו ממומן על ידי תוכנה כלשהי המשמשת במחקר זה ומכיר בכך שקיימות תוכנות אחרות המסוגלות לבצע מחקר דומה.
Acknowledgements
מחקר זה מומן ברובו על ידי מרכז הטיוב והשיקום של ויומינג ו-Jonah Energy, LLC. אנו מודים ל-Warren Resources ו-Escelara Resources על מימון יחידת Trimble Juno 5. אנו מודים ל-Jonah Energy, LLC על התמיכה המתמשכת במימון ניטור הצמחייה בוויומינג. אנו מודים למרכז למדעי המידע הגיאוגרפי של ויומינג על אספקת ציוד הכטב"מים ששימש במחקר זה.
Access restricted. Please log in or start a trial to view this content.
Materials
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
References
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , CRC Press. Boca Raton, FL. 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , Aitkenvale, Queensland, Australia. (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , Denver, CO, USA. (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524(2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- Hahsler, M., Hornik, K. TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7. , Available from: https://CRAN.R-project.org/package=TSP (2019).
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- Bivand, R., Keitt, T., Rowlingson, B. rgdal: bindings for geospatial data abstraction library. R package version 1.2-7. , Available from: https://CRAN.R-project.org/package=rgdal (2017).
- McDonald, T. SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3. , Available from: https://CRAN.R-project.org/package=SDraw (2016).
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049(2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041(2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Access restricted. Please log in or start a trial to view this content.
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved