
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Наземная беспилотная аэрофотосъемка в сочетании с пространственно сбалансированным отбором проб и оптимизацией маршрута для мониторинга растительности пастбищных угодий
В этой статье
Резюме
Протокол, представленный в этой статье, использует оптимизацию маршрута, сбалансированную приемочную выборку, а также съемку с уровня земли и беспилотных авиационных систем (БАС) для эффективного мониторинга растительности в экосистемах пастбищных угодий. Сравниваются результаты изображений, полученных с помощью наземных методов и методов БАС.
Аннотация
Экосистемы пастбищных угодий охватывают 3,6 миллиарда гектаров во всем мире, из которых 239 миллионов гектаров расположены в Соединенных Штатах. Эти экосистемы имеют решающее значение для поддержания глобальных экосистемных услуг. Мониторинг растительности в этих экосистемах необходим для оценки состояния пастбищных угодий, определения пригодности среды обитания для диких животных и домашнего скота, для борьбы с инвазивными сорняками и для выяснения временных изменений окружающей среды. Несмотря на то, что экосистемы пастбищных угодий охватывают обширные территории, традиционные методы мониторинга часто отнимают много времени и неэффективны с точки зрения затрат, подвержены высокой предвзятости наблюдателя и часто не имеют адекватной пространственной информации. Мониторинг растительности на основе изображений быстрее, позволяет получать постоянные записи (т.е. изображения), может привести к уменьшению систематической ошибки наблюдателя и по своей сути включает адекватную пространственную информацию. Пространственно сбалансированные схемы отбора проб полезны для мониторинга природных ресурсов. Представлен протокол для реализации пространственно сбалансированной схемы выборки, известной как сбалансированная приемочная выборка (BAS), с изображениями, полученными с наземных камер и беспилотных авиационных систем (БАС). Алгоритм оптимизации маршрута используется в дополнение к решению «задачи коммивояжера» (TSP) для повышения эффективности использования времени и средств. В то время как изображения с беспилотных летательных аппаратов могут быть получены в 2–3 раза быстрее, чем изображения с рук, оба типа изображений похожи друг на друга с точки зрения точности и точности. Наконец, обсуждаются плюсы и минусы каждого метода, а также приводятся примеры потенциального применения этих методов в других экосистемах.
Введение
Экосистемы пастбищных угодий охватывают обширные территории, охватывающие 239 млн га в Соединенных Штатах и 3,6 млрд га во всеммире1. Пастбищные угодья обеспечивают широкий спектр экосистемных услуг, а управление пастбищными угодьями включает в себя многообразие землепользования. На западе США пастбища обеспечивают среду обитания диких животных, хранение воды, связывание углерода и корм для домашнего скота2. Пастбищные угодья подвержены различным нарушениям, включая инвазивные виды, лесные пожары, развитие инфраструктуры и добычу природных ресурсов (например, нефти, газа и угля)3. Мониторинг растительности имеет решающее значение для устойчивого управления ресурсами пастбищных угодий и других экосистем во всем мире 4,5,6. Мониторинг растительности на пастбищных угодьях часто используется для оценки состояния пастбищных угодий, пригодности среды обитания для диких животных, а также для каталогизации изменений ландшафтов в результате инвазивных видов, лесных пожаров и добычи природных ресурсов 7,8,9,10. В то время как цели конкретных программ мониторинга могут различаться, желательны программы мониторинга, которые соответствуют потребностям многих заинтересованных сторон, будучи при этом статистически надежными, воспроизводимыми и экономичными 5,7,11. Несмотря на то, что землеустроители признают важность мониторинга, он часто рассматривается как ненаучный, неэкономичный и обременительный5.
Традиционно мониторинг пастбищных угодий проводился с использованием различных методов, включая офтальмологическую или визуальную оценку10, кадры Даубенмайра12, составление графиков13 и пересечение точек линий вдоль разрезов растительности14. В то время как глазная или визуальная оценка экономит время, она подвержена высокой систематической ошибке наблюдателя15. Другие традиционные методы, хотя и подвержены высокой предвзятости наблюдателя, часто неэффективны из-за их временных и финансовых требований 6,15,16,17. Время, необходимое для реализации многих из этих традиционных методов, часто слишком обременительно, что затрудняет получение статистически достоверных размеров выборки, что приводит к ненадежным оценкам популяции. Эти методы часто применяются на основе удобства, а не стохастически, когда наблюдатели сами выбирают, где они собирают данные. Кроме того, зарегистрированные и фактические места отбора проб часто различаются, что приводит к путанице для землеустроителей и других заинтересованных сторон, полагающихся на данные мониторинга растительности18. Недавние исследования показали, что мониторинг растительности на основе изображений является эффективным по времени и затратам 6,19,20. Увеличение объема данных, которые могут быть отобраны в пределах данной области за короткий промежуток времени, должно повысить статистическую надежность данных по сравнению с более трудоемкими традиционными методами. Изображения представляют собой постоянные записи, которые могут быть проанализированы несколькими наблюдателями после сбора полевых данных6. Кроме того, многие камеры оснащены системами глобального позиционирования (GPS), поэтому изображения могут быть помечены геотегами с указанием местоположения коллекции18,20. Использование компьютерных точек отбора проб, точно расположенных в полевых условиях, должно уменьшить предвзятость наблюдателя независимо от того, получено ли изображение с помощью ручной камеры или беспилотной авиационной системы, поскольку это снижает склонность отдельного наблюдателя использовать свое мнение о том, где следует разместить выборку.
Помимо того, что традиционный мониторинг природных ресурсов отнимает много времени, средств и подвержен высокой систематической ошибке наблюдателя, он часто не в состоянии адекватно охарактеризовать неоднородные пастбищные угодья из-за небольшого размера выборки и мест концентрации выборки21. Пространственно сбалансированные схемы отбора проб более равномерно распределяют места отбора проб по интересующей территории для лучшей характеристики природных ресурсов 21,22,23,24. Такие конструкции могут снизить затраты на выборку, поскольку для достижения статистической точности требуется меньший размер выборки по сравнению с простой случайной выборкой25.
В этом методе пространственно сбалансированная схема отбора проб, известная как сбалансированная приемочная выборка (BAS)22,24, сочетается с мониторингом на основе изображений для оценки растительности пастбищных угодий. Точки BAS оптимально распределены по интересующей области26. Однако это не гарантирует, что баллы будут заказаны по оптимальному маршруту для посещения20. Таким образом, точки BAS располагаются с помощью алгоритма оптимизации маршрута, который решает задачу коммивояжера (TSP)27. Посещение точек в указанном порядке определяет оптимальный путь (т.е. наименьшее расстояние), соединяющий точки. Точки BAS передаются в программное обеспечение географической информационной системы (ГИС), а затем в портативный блок сбора данных, оснащенный GPS. После того, как точки BAS обнаружены, снимки делаются с помощью камеры, оснащенной GPS, а также беспилотной авиационной системы, управляемой с помощью полетного программного обеспечения. После выхода на поле техники он подходит к каждой точке, чтобы получить изображения с камеры размером 1м2 с расстоянием до наземных проб (GSD) 0,3 мм в каждой точке BAS, в то время как беспилотный летательный аппарат летит к тем же точкам и получает изображения с точностью 2,4 мм-GSD. Затем данные о растительном покрове генерируются с помощью 'SamplePoint'28 для ручной классификации 36 точек/изображение. Сравниваются данные о растительном покрове, полученные в результате анализа изображений с уровня земли и БАС, а также заявленное время получения данных для каждого метода. В репрезентативном исследовании использовались два смежных участка пастбищ площадью 10 акров. Наконец, обсуждаются другие применения этого метода и то, как он может быть модифицирован для будущих проектов или проектов в других экосистемах.
протокол
1. Определение области исследования, построение точек отбора проб и траектории перемещения, а также подготовка поля
- Определение области исследования
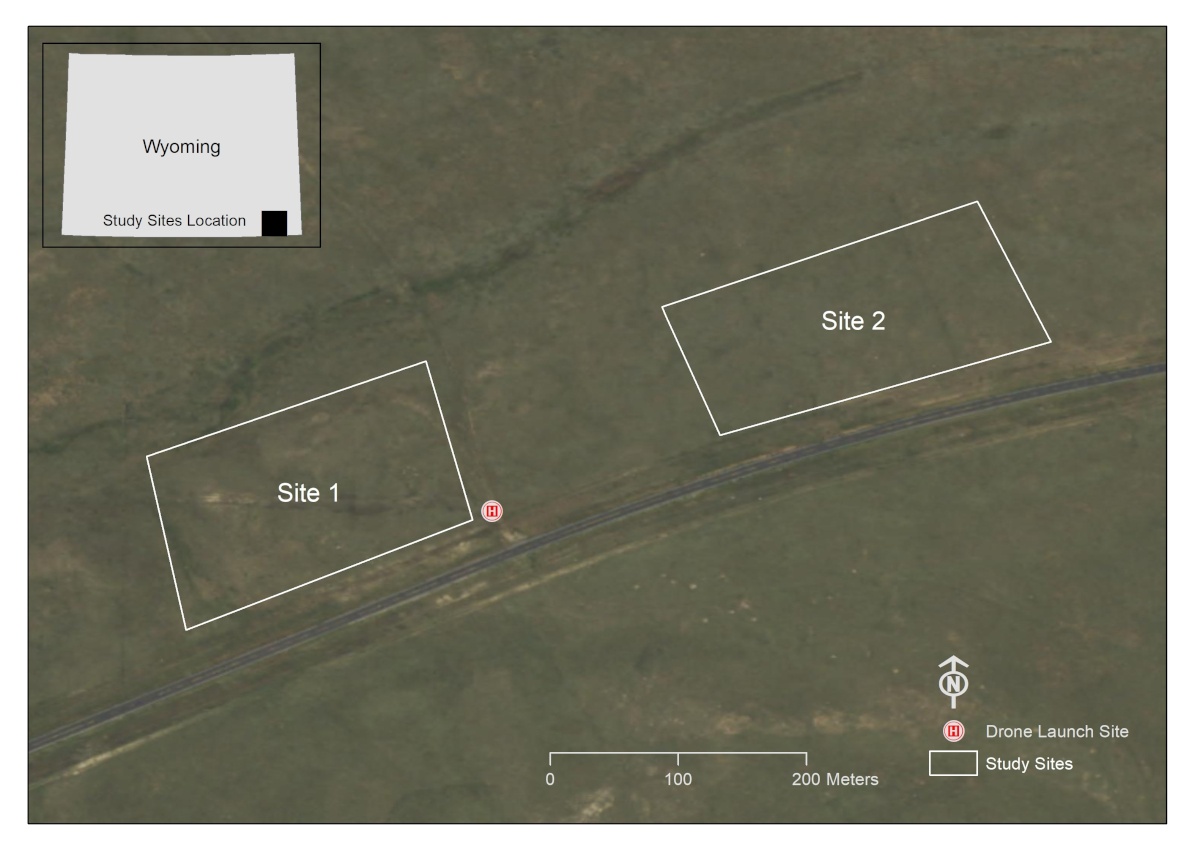
- Используйте программное обеспечение ГИС, чтобы нарисовать графику (графики) полигона вокруг интересующей вас области. Это исследование проводилось на двух участках площадью 10 акров в пределах пастбищного участка в округе Ларами, штат Вайоминг, США (Рисунок 1).
- Убедитесь, что из полигона исключены те области, которые не должны находиться в пределах кадра образца (например, водоемы, строительные конструкции, дороги и т. д.). Это гарантирует, что в дальнейшем эти области не будут сделаны на снимках.
- Преобразуйте полигональную графику в шейп-файл (.shp) в программе ГИС и убедитесь, что шейп-файл создан в нужной системе координат.

Рисунок 1: Изображение областей исследования, представляющих интерес. Это место находится на пастбище к югу от Шайенна в округе Ларами, штат Вайоминг, США (источник изображений: Wyoming NAIP Imagery 2017). Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Формирование точек BAS и оптимизация траектории движения
ПРИМЕЧАНИЕ: Код прикрепляется как 'Supplemental_Code.docx'.- Используйте пакет R 'rgdal'29 для преобразования полигона ГИС в файл для чтения в программе R.
- Используйте пакет R 'SDraw'30 для генерации нужного количества точек BAS. В этом исследовании использовалось 30 точек BAS на исследуемую территорию, хотя будущие исследования должны быть проведены для определения оптимальной интенсивности отбора проб для участков различного размера и состава растительности.
- Используйте пакет R 'TSP'27 для заказа баллов BAS. Посещение точек в таком порядке сводит к минимуму время, необходимое для получения проб в пунктах BAS.
- Подготовка к съемке с рук
- Используйте пакет R 'rgdal' для переноса баллов из шага 1.2.1 обратно в программу ГИС.
- Отредактируйте таблицу атрибутов шейп-файла, чтобы поле идентификатора точки точно отражало оптимизированный порядок пути.
- Перенесите файл полигона и точки ГИС в программное обеспечение ГИС, работающее на портативном устройстве.
- Убедитесь, что для области интереса выбрана правильная система координат проекции.
- Подготовка к получению снимков с БАС
- Используйте пакет R 'rgdal' для переноса точек из шага 1.2.1 обратно в программное обеспечение ГИС.
- В программном обеспечении ГИС используйте инструмент Добавить координаты XY для создания и заполнения полей широты и долготы в таблице атрибутов путевых точек.
- Экспортируйте таблицу атрибутов путевых точек, содержащую столбцы широты, долготы и TSP, в формат файла *.csv.
- Откройте файл *.csv в соответствующем программном пакете.
- Сортировка путевых точек по идентификатору TSP.
- Откройте приложение Mission Hub.
- Создайте произвольную путевую точку в Mission Hub.
- Экспортируйте произвольную путевую точку как файл *.csv.
- Откройте файл *.csv в программе для работы с электронными таблицами и удалите произвольные заголовки столбцов с сохранением путевых точек.
- Скопируйте отсортированные TSP пары координат путевых точек из шага 1.2.3 в соответствующие столбцы в файле *.csv из шага 1.4.8.
- Импортируйте файл *.csv из шага 1.4.10 в Mission Hub в качестве новой миссии.
- Определите настройки.
- Установите флажок Использовать онлайн-высоту .
- Укажите режим контура в виде прямых линий.
- Укажите Finish Action как RTH, чтобы дрон мог вернуться домой после завершения миссии.
- Кликните по отдельным путевым точкам и Добавить действия , указав следующие параметры: Пребывание: 2 с (чтобы избежать размытия изображения); Угол наклона камеры: -90° (надир); Сделайте фото.
- Сохраните миссию с подходящим именем.
- Повторите процесс для дополнительных сайтов.
2. Сбор полевых данных и постобработка
- Регистрация растительности, наблюдаемой или ожидаемой на исследуемой территории
- Перед получением изображений создайте список растительности, наблюдаемой в пределах изучаемой территории. Это можно сделать на рукописном листе или на цифровом бланке, чтобы впоследствии облегчить идентификацию по фотографии. Может быть целесообразно включить в инвентаризацию виды, которые можно ожидать в данном районе, даже если они не наблюдаются в полевых условиях (например, виды в мелиоративных семенных смесях)18.
- Наземная съемка изображений
- Прикрепите камеру к вертикальному моноподу и направьте камеру вниз примерно на 60°. Область изображения может быть определена с помощью объектива и разрешения (мегапиксельного) камеры и установки монопода на стандартную высоту. Высота монопода в сочетании с техническими характеристиками камеры будет определять расстояние до выборки на земле (GSD). В этом исследовании использовалась 12,1-мегапиксельная камера, а монопод был установлен на постоянной высоте 1,3 м над землей для получения изображений Надира с разрешением ~0,3 мм GSD18.
- Наклоните монопод вперед так, чтобы объектив камеры находился в положении надира, а наклонный монопод не был виден на изображении.
- Отрегулируйте высоту монопода или зум на объективе, чтобы получить размер безрамочного графика 1м2 (или другой желаемый размер графика). Для наиболее распространенных камер с соотношением сторон 4:3 ширина участка 115 см дает поле зрения 1м2 . Нет необходимости размещать каркас на земле; Весь образ – это сюжет. Если для этого необходимо настроить зум на объективе, используйте малярный скотч, чтобы предотвратить случайные изменения настроек зума.
- Если возможно, переведите камеру в режим приоритета выдержки и установите выдержку не менее 1/125 с, чтобы избежать смазывания изображения; Быстрее, если ветрено.
- Найдите первую точку в оптимизированном порядке траектории.
- Поместите монопод на землю в точке 1 и наклоните монопод до тех пор, пока камера не окажется в положении Надир. Убедитесь, что тень оператора отсутствует на изображении. Держите камеру неподвижно, чтобы предотвратить размытие движения. Получите изображение.
ПРИМЕЧАНИЕ: Для этого шага полезен кабель дистанционного запуска. - Проверяйте качество изображения, чтобы убедиться в успешном захвате данных.
- Перейдите к следующей точке в порядке оптимизированного пути и повторите шаги сбора.
- Получение изображений с помощью беспилотных летательных аппаратов
- Перед запуском БАС проведите краткую разведку района исследования, чтобы убедиться в отсутствии физических препятствий на траектории полета. Эти разведывательные учения также полезны для определения довольно ровной местности для запуска БАС.
- Убедитесь, что погодные условия подходят для полетов на БАС: сухой ясный день (видимость >4,8 км) с достаточным освещением, минимальным ветром (<17 узлов) и температурой от 0 °C до 37 °C.
- Соблюдайте юридические протоколы. Например, в США следует следовать политике Федерального управления гражданской авиации.
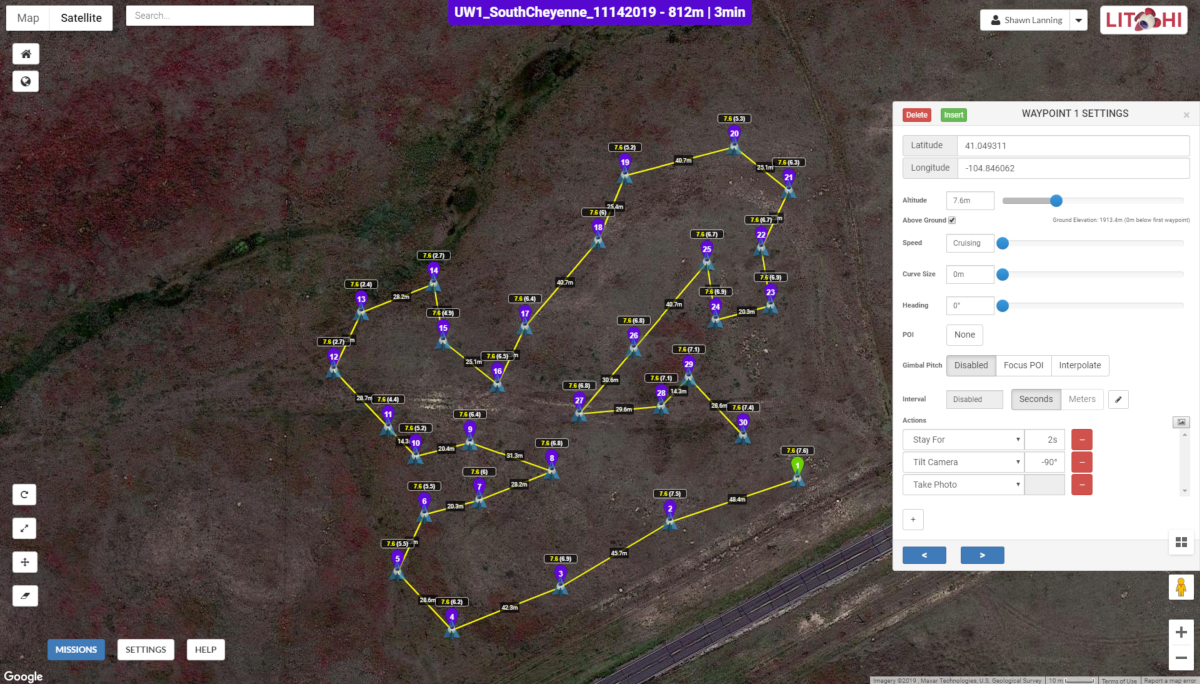
- Используйте программное обеспечение Mission Hub (рисунок 2) и приложение для выполнения миссии, доступное через мобильные устройства (рисунок 3).
- Соберите снимки БАС в каждой точке BAS, как описано в шаге 1.4.
- Перед сменой местоположения убедитесь, что все изображения были получены с помощью мобильного устройства.

Рисунок 2: Пользовательский интерфейс Mission Hub. На карте изображена траектория полета дрона вдоль серии из 30 точек BAS на одном из участков исследования, в то время как во всплывающем окне отображаются параметры получения изображений в каждой путевой точке. Рисунок 2 специфичен для Зоны 1, хотя внешне он похож на Зону 2. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}

Рисунок 3: Полет по путевой точке в приложении для выполнения миссии Личи, работающем на смартфоне Android. Уникальные идентификаторы путевых точек показаны фиолетовым цветом и представляют относительный порядок, в котором были сделаны снимки в различных точках изучаемой территории. Числа в каждой путевой точке, такие как 7(6), обозначают целочисленные значения высот над землей, на которых были сделаны снимки (первое число), и высот над домашней точкой или местом запуска беспилотника (второе число). Обратите внимание на расстояния между последовательными путевыми точками, которые обозначены на карте. Рисунок 3 специфичен для Зоны 1, хотя внешне она похожа на Зону 2. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этой цифры.
{kind=link}
- Постобработка изображений с уровня земли.
ПРИМЕЧАНИЕ: Инструкции доступны по www.SamplePoint.org в разделе руководства; Дополнительный файл .pdf прилагается.- Загружайте изображения на компьютер с помощью USB-кабеля или SD-карты.
- Убедитесь, что изображения были сделаны в правильных местах. Существует различное программное обеспечение для размещения изображений в программном обеспечении ГИС на основе метаданных в изображениях с геотегами.
- Если снимки были получены в нескольких районах исследования, храните их в отдельных папках для анализа изображений.
- Постобработка изображений UAS
- Переносите изображения, сохраненные на съемной карте microSD, с UAS на компьютер.
- Повторите шаги 2.4.2 и 2.4.3.
3. Анализ изображений
ПРИМЕЧАНИЕ: Все шаги можно найти в разделе «Руководство» на www.SamplePoint.org; Дополнительный файл 'tutorial.pdf' прилагается.
- В SamplePoint нажмите Параметры | Мастер баз данных | Создание/заполнение базы данных.
- Присвойте базе данных имя в соответствии с изучаемой областью.
- Перейдите к папке, содержащей нужные образцы изучаемой территории, и выберите те, которые необходимо классифицировать.
- Нажмите «Готово».
- Нажмите «Опции» | Выберите База данных и выберите файл *.xls, который SamplePoint генерирует на основе выбранного изображения (он будет на изображении).
- Подтвердите правильность выбора количества изображений в базе данных по запросу SamplePoint.
- Выберите желаемое количество пикселей для анализа в каждом изображении. Это может быть сделано в виде сетки или случайным образом. В этом исследовании использовалась сетка 6 x 6 для выбора в общей сложности 36 пикселей, хотя большее или меньшее количество пикселей на изображение может быть классифицировано в зависимости от желаемой точности измерения для классификации. Недавнее исследование показало, что 20–30 пикселей на изображение достаточно для выборки больших площадей31. Опция сетки гарантирует, что пиксели будут находиться в одном и том же положении при повторном анализе изображения, в то время как опция random будет случайным образом генерировать пиксели при каждой перезагрузке изображения.
- Создайте пользовательский файл Button для классификации видов. Этот список может быть составлен на основе списка растительности, записанного в поле до получения изображения, или он может быть основан на другой информации, относящейся к изучаемой территории (например, список смесей семян на мелиорированных участках или информация об описании экологического участка и т.д.). Убедитесь, что кнопка создана для голой земли или почвы и других потенциально нерастительных объектов, с которыми можно столкнуться, таких как мусор или камни. Рекомендуется создать кнопку Неизвестно , чтобы позволить аналитику классифицировать виды позже. Поле комментария в SamplePoint можно использовать для записи пикселей, в которых используется этот параметр. Кроме того, если разрешение изображения недостаточно высокое для классификации по уровням видов, рекомендуется создать кнопки для функциональных групп (например, «Трава», « Разнотравье», «Кустарник»).
- Начните анализ изображений, нажав кнопку классификации, которая описывает пиксель изображения, на который направлен красный перекрестие. Повторяйте это до тех пор, пока SamplePoint не выдаст подсказку: «Это все точки. Нажмите на следующее изображение». Повторите это для всех изображений в базе данных.
ПРИМЕЧАНИЕ: Функция «Масштаб » может быть использована для помощи в классификации. - Когда все изображения в базе данных будут полностью проанализированы, SamplePoint выдаст запрос «Вы исчерпали все изображения». На этом этапе нажмите OK и нажмите Options | Создание файлов статистики.
- Перейдите в папку, содержащую базу данных, и откройте только что созданный файл *.csv, чтобы убедиться, что данные по всем изображениям сохранены.
4. Статистический анализ
- Анализ хи-квадрат для определения различий между сайтами
- Поскольку на обоих участках собирается и анализируется одинаковое количество изображений (первичных единиц выборки) и пикселей (вторичных единиц выборки), сравнение между двумя сайтами можно считать продуктом мультиномиального дизайна.
- С помощью файла *.csv, созданного на шаге 3.11, рассчитайте сумму баллов, классифицированных для каждой категории классификации.
- Выполнение анализа хи-квадрат на суммах точек. Если Сайт 1 и Сайт 2 похожи друг на друга, то на обоих Сайтах18 будет видно примерно равное количество пикселей, классифицированных по каждому типу обложки.
- Регрессионная технология для сравнения БАС и изображений с уровня земли
- Используя файлы *.csv, созданные на шаге 3.11, скопируйте и вставьте средний процент покрытия с каждого изображения и совместите данные изображения БАС с данными изображения на уровне земли.
- Выполнение регрессионного анализа в программе базы данных.
Результаты
Получение изображений с помощью беспилотных летательных аппаратов заняло в два раза меньше времени по сравнению с наземными изображениями, в то время как время анализа было немного меньше при использовании наземных изображений (таблица 1). Наземные снимки и?...
Обсуждение
Важность мониторинга природных ресурсов признана уже давно14. В связи с повышенным вниманием к глобальным экологическим проблемам все большее значение приобретает разработка надежных методов мониторинга, эффективных с точки зрения времени и средств. Не...
Раскрытие информации
Авторы заявляют об отсутствии конфликта интересов. Программное обеспечение, использованное в этом исследовании, было доступно авторам либо с открытым исходным кодом, либо по институциональным разрешениям. Ни один из авторов не спонсируется каким-либо программным обеспечением, используемым в этом исследовании, и признает, что существуют другие программы, способные проводить аналогичные исследования.
Благодарности
Это исследование в основном финансировалось Центром мелиорации и восстановления штата Вайоминг и компанией Jonah Energy, LLC. Мы благодарим Warren Resources и Escelara Resources за финансирование установки Trimble Juno 5. Мы благодарим компанию Jonah Energy, LLC за постоянную поддержку в финансировании мониторинга растительности в Вайоминге. Мы благодарим Центр географических информационных наук штата Вайоминг за предоставление оборудования для беспилотных летательных аппаратов, использованного в этом исследовании.
Материалы
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
Ссылки
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524 (2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7 Available from: https://CRAN.R-project.org/package=TSP (2019)
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- rgdal: bindings for geospatial data abstraction library. R package version 1.2-7 Available from: https://CRAN.R-project.org/package=rgdal (2017)
- SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3 Available from: https://CRAN.R-project.org/package=SDraw (2016)
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049 (2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041 (2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены