
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Mera Bitki Örtüsünü İzlemek için Mekansal Olarak Dengeli Örnekleme ve Rota Optimizasyonu ile Birleştirilmiş Yer Seviyesinde İnsansız Hava Sistemi Görüntüleri
Bu Makalede
Özet
Bu yazıda sunulan protokol, mera ekosistemlerindeki bitki örtüsünü verimli bir şekilde izlemek için rota optimizasyonu, dengeli kabul örneklemesi ve yer seviyesi ve insansız uçak sistemi (UAS) görüntülerini kullanır. Yer seviyesi ve İHA yöntemlerinden elde edilen görüntülerden elde edilen sonuçlar karşılaştırılır.
Özet
Mera ekosistemleri, Amerika Birleşik Devletleri'nde bulunan 239 milyon hektar ile dünya çapında 3,6 milyar hektarlık bir alanı kaplamaktadır. Bu ekosistemler, küresel ekosistem hizmetlerini sürdürmek için kritik öneme sahiptir. Bu ekosistemlerdeki bitki örtüsünün izlenmesi, mera sağlığını değerlendirmek, yaban hayatı ve evcil hayvancılık için habitat uygunluğunu ölçmek, istilacı yabani otlarla mücadele etmek ve zamansal çevresel değişiklikleri aydınlatmak için gereklidir. Mera ekosistemleri geniş alanları kapsasa da, geleneksel izleme teknikleri genellikle zaman alıcı ve maliyet açısından verimsizdir, yüksek gözlemci yanlılığına tabidir ve genellikle yeterli mekansal bilgiden yoksundur. Görüntü tabanlı bitki örtüsü izleme daha hızlıdır, kalıcı kayıtlar (yani görüntüler) üretir, gözlemci yanlılığının azalmasına neden olabilir ve doğası gereği yeterli mekansal bilgi içerir. Mekansal olarak dengeli örnekleme tasarımları, doğal kaynakların izlenmesinde faydalıdır. Yer seviyesindeki kameralardan ve insansız hava sistemlerinden (UAS) elde edilen görüntülerle dengeli kabul örneklemesi (BAS) olarak bilinen mekansal olarak dengeli bir örnekleme tasarımının uygulanması için bir protokol sunulmaktadır. Zaman ve maliyet verimliliğini artırmak için 'seyahat eden satış elemanı problemini' (TSP) çözmenin yanı sıra bir rota optimizasyon algoritması kullanılır. UAS görüntüleri, elde taşınan görüntülerden 2-3 kat daha hızlı elde edilebilirken, her iki görüntü türü de doğruluk ve hassasiyet açısından birbirine benzer. Son olarak, her bir yöntemin artıları ve eksileri tartışılmakta ve bu yöntemlerin diğer ekosistemlerdeki potansiyel uygulamalarına örnekler verilmektedir.
Giriş
Mera ekosistemleri, Amerika Birleşik Devletleri'nde 239 milyon hektarı ve küresel olarak 3,6 milyar hektarı kapsayan geniş alanları kapsar1. Meralar, çok çeşitli ekosistem hizmetleri sağlar ve meraların yönetimi birden fazla arazi kullanımını içerir. Batı ABD'de meralar, yaban hayatı habitatı, su depolama, karbon tutma ve evcil hayvanlar için yem sağlar2. Meralar, istilacı türler, orman yangınları, altyapı geliştirme ve doğal kaynak çıkarma (örneğin petrol, gaz ve kömür) dahil olmak üzere çeşitli rahatsızlıklara maruz kalır.3. Bitki örtüsünün izlenmesi, dünya çapında meralar ve diğer ekosistemler içinde kaynak yönetiminin sürdürülmesi için kritik öneme sahiptir 4,5,6. Meralarda bitki örtüsünün izlenmesi genellikle mera sağlığını, yaban hayatı türleri için habitat uygunluğunu değerlendirmek ve istilacı türler, orman yangınları ve doğal kaynak çıkarımı nedeniyle peyzajlardaki değişiklikleri kataloglamak için kullanılır 7,8,9,10. Belirli izleme programlarının hedefleri farklılık gösterebilse de, istatistiksel olarak güvenilir, tekrarlanabilir ve ekonomik olmakla birlikte birden fazla paydaşın ihtiyaçlarına uyan izleme programları arzu edilmektedir 5,7,11. Arazi yöneticileri izlemenin önemini kabul etseler de, genellikle bilimsel olmayan, ekonomik olmayan ve külfetli olarak görülür5.
Geleneksel olarak, mera izlemesi, oküler veya görsel tahmin10, Daubenmire çerçeveleri12, çizim grafiği13 ve bitki örtüsü kesitleri boyunca çizgi noktası kesişimi14 dahil olmak üzere çeşitli yöntemlerle gerçekleştirilmiştir. Oküler veya görsel tahmin zaman açısından verimli olsa da, yüksek gözlemci yanlılığınatabidir 15. Diğer geleneksel yöntemler de yüksek gözlemci yanlılığına maruz kalsa da, zaman ve maliyet gereksinimleri nedeniyle genellikle verimsizdir 6,15,16,17. Bu geleneksel yöntemlerin birçoğunu uygulamak için gereken süre genellikle çok külfetlidir ve istatistiksel olarak geçerli örneklem büyüklüklerinin elde edilmesini zorlaştırır ve bu da güvenilmez popülasyon tahminlerine neden olur. Bu yöntemler genellikle stokastik olarak değil, kolaylığa dayalı olarak uygulanır ve gözlemciler verileri nerede toplayacaklarını seçerler. Ek olarak, rapor edilen ve gerçek numune konumları sıklıkla farklılık göstermekte ve bu da arazi yöneticileri ve bitki örtüsü izleme verilerine dayanan diğer paydaşlar için kafa karışıklığına neden olmaktadır18. Son araştırmalar, görüntü tabanlı bitki örtüsü izlemenin zaman ve maliyet etkin olduğunu göstermiştir 6,19,20. Belirli bir alanda kısa sürede örneklenebilecek veri miktarını artırmak, daha fazla zaman alan geleneksel tekniklere kıyasla verilerin istatistiksel güvenilirliğini artırmalıdır. Görüntüler, saha verileri toplandıktan sonra birden fazla gözlemci tarafından analiz edilebilen kalıcı kayıtlardır6. Ek olarak, birçok kamera küresel konumlandırma sistemleri (GPS) ile donatılmıştır, bu nedenle görüntüler bir toplama konumu18,20 ile coğrafi olarak etiketlenebilir. Sahada doğru bir şekilde konumlandırılmış, bilgisayar tarafından oluşturulan örnekleme noktalarının kullanılması, görüntünün bir el kamerasıyla mı yoksa insansız bir hava sistemi tarafından mı elde edildiği, gözlemcinin yanlılığını azaltmalıdır, çünkü bireysel bir gözlemcinin örnek konumlarının nereye yerleştirilmesi gerektiğine dair görüşlerini kullanma eğilimini azaltır.
Zaman alıcı, maliyetli ve yüksek gözlemci yanlılığına maruz kalmanın yanı sıra, geleneksel doğal kaynak izleme, düşük örneklem büyüklüğü ve konsantre örnekleme konumları nedeniyle heterojen meraları yeterince karakterize etmede sıklıkla başarısız olur21. Mekansal olarak dengeli örnekleme tasarımları, doğal kaynakları daha iyi karakterize etmek için örnek konumlarını bir ilgi alanına daha eşit bir şekilde dağıtır 21,22,23,24. Bu tasarımlar örnekleme maliyetlerini azaltabilir, çünkü basit rastgele örneklemeye göre istatistiksel doğruluk elde etmek için daha küçük örneklem boyutları gerekir25.
Bu yöntemde, dengeli kabul örneklemesi (BAS)22,24 olarak bilinen mekansal olarak dengeli bir örnekleme tasarımı, mera bitki örtüsünü değerlendirmek için görüntü tabanlı izleme ile birleştirilir. BAS noktaları, ilgi alanına en uygun şekilde yayılır26. Ancak bu, noktalarınziyaret 20 için en uygun rotada sıralanacağını garanti etmez. Bu nedenle, BAS noktaları, seyahat eden satış elemanı problemini (TSP) çözen bir rota optimizasyon algoritması kullanılarak düzenlenir27. Noktaları bu sırayla ziyaret etmek, noktaları birbirine bağlayan en uygun yolu (yani en az mesafeyi) belirler. BAS noktaları, bir coğrafi bilgi sistemi (CBS) yazılım programına ve ardından GPS ile donatılmış bir el tipi veri toplama ünitesine aktarılır. BAS noktaları tespit edildikten sonra GPS donanımlı bir kamera ile ve uçuş yazılımı kullanılarak çalıştırılan insansız hava sistemi ile görüntüler alınmaktadır. Sahaya girdikten sonra, bir teknisyen her BAS noktasında 0,3 mm zemin örnekleme mesafesi (GSD) ile 1m2 monopod monteli kamera görüntüsü elde etmek için her noktaya yürürken, bir UAS aynı noktalara uçar ve 2,4 mm-GSD görüntüleri elde eder. Daha sonra, 36 noktayı/görüntüyü manuel olarak sınıflandırmak için 'SamplePoint'28 kullanılarak bitki örtüsü verileri oluşturulur. Yer seviyesi ve UAS görüntülerinin analizinden elde edilen bitki örtüsü verileri karşılaştırılır ve her bir yöntem için rapor edilen edinme süreleri karşılaştırılır. Temsili çalışmada, iki bitişik, 10 dönümlük mera arazisi kullanılmıştır. Son olarak, bu yöntemin diğer uygulamaları ve gelecekteki projeler veya diğer ekosistemlerdeki projeler için nasıl değiştirilebileceği tartışılmaktadır.
Access restricted. Please log in or start a trial to view this content.
Protokol
1. Çalışma alanının tanımlanması, örnek noktaların ve seyahat yolunun oluşturulması ve alan hazırlığı
- Çalışma alanının tanımı
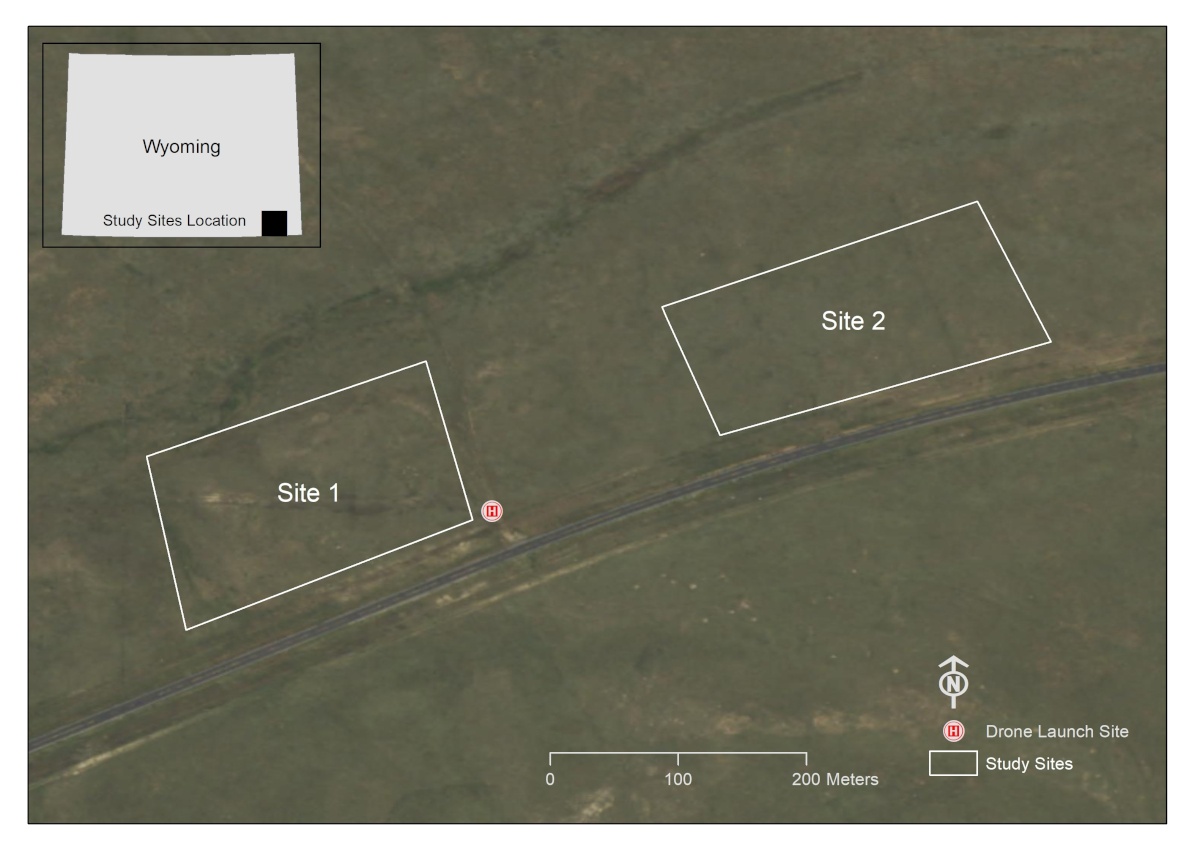
- İlgilenilen alan(lar)ın etrafına çokgen grafik(ler) çizmek için bir CBS yazılım programı kullanın. Bu çalışma, ABD'nin WY eyaletindeki Laramie County'de bir otlatma alanı içindeki 10 dönümlük iki arazi üzerinde gerçekleştirilmiştir (Şekil 1).
- Numune çerçevesi içinde olması amaçlanmayan alanların poligonun dışında tutulduğundan emin olun (örn. su kütleleri, bina yapıları, yollar vb.). Bu, daha sonra bu alanların görüntülerinin çekilmemesini sağlayacaktır.
- Çokgen grafiğini CBS yazılım programında bir şekil dosyası özelliğine (.shp) dönüştürün ve şekil dosyasının istenen koordinat sisteminde oluşturulduğundan emin olun.

Şekil 1: Çalışma ilgi alanlarının bir tasviri. Bu konum, ABD'nin WY eyaletindeki Laramie County'deki Cheyenne'nin güneyinde bir otlak alanı üzerindedir (Görüntü Kaynağı: Wyoming NAIP Imagery 2017). Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- BAS noktalarının oluşturulması ve hareket yolunun optimize edilmesi
NOT: Kod 'Supplemental_Code.docx' olarak eklenmiştir.- GIS poligonunu Program R tarafından okunabilir bir dosyaya dönüştürmek için R paketi 'rgdal'29'u kullanın.
- İstenen sayıda BAS noktası oluşturmak için 'SDraw'30 R paketini kullanın. Bu çalışmada, çalışma alanı başına 30 BAS puanı kullanılmıştır, ancak çeşitli büyüklük ve bitki örtüsü bileşimine sahip alanlar için en uygun örnekleme yoğunluğunu belirlemek için gelecekteki araştırmalar yapılmalıdır.
- BAS noktalarını sipariş etmek için R Paketi 'TSP'27'yi kullanın. Noktaların bu sırayla ziyaret edilmesi, BAS noktalarında numune almak için gereken süreyi en aza indirir.
- Elde görüntü alımı için hazırlık
- Adım 1.2.1'deki noktaları GIS programına geri aktarmak için 'rgdal' R paketini kullanın.
- Şekil dosyasının öznitelik tablosunu, nokta kimliği alanı en iyileştirilmiş yol sırasını doğru bir şekilde yansıtacak şekilde düzenleyin.
- CBS poligonu ve nokta dosyasını bir el ünitesinde çalışan CBS yazılımına aktarın.
- İlgilenilen alan için doğru öngörülen koordinat sisteminin yerinde olduğundan emin olun.
- UAS görüntü alımı için hazırlık
- Adım 1.2.1'deki noktaları GIS yazılım programına geri aktarmak için 'rgdal' R paketini kullanın.
- CBS yazılım programında, yol noktası öznitelik tablosunda enlem ve boylam alanları oluşturmak ve doldurmak için XY Koordinatları Ekle aracını kullanın.
- Enlem, Boylam ve TSP sütunlarını içeren yol noktası öznitelik tablosunu *.csv dosya biçimine aktarın.
- *.csv dosyasını uygun bir yazılım paketinde açın.
- Ara noktaları TSP tanımlayıcısına göre sıralayın.
- Mission Hub uygulamasını açın.
- Mission Hub'da rastgele bir ara nokta oluşturun.
- İsteğe bağlı ara noktayı *.csv dosyası olarak dışa aktarın.
- *.csv dosyasını bir elektronik tablo programında açın ve isteğe bağlı ara nokta tutma sütun başlıklarını silin.
- Adım 1.2.3'ten TSP sıralanmış ara nokta koordinat çiftlerini, adım 1.4.8'deki *.csv dosyasındaki ilgili sütunlara kopyalayın.
- *.csv dosyasını 1.4.10 adımındaki dosyayı yeni bir görev olarak Görev Merkezi'ne aktarın.
- Ayarları tanımlayın.
- Çevrimiçi Yükseltmeyi Kullan kutusunu işaretleyin.
- Yol modunu Düz Çizgiler olarak belirtin.
- Görev tamamlandıktan sonra dronun Eve Dönmesini sağlamak için Bitirme Eylemini RTH olarak belirtin.
- Tek tek ara noktalara tıklayın ve aşağıdaki parametreleri belirterek Eylem Ekle'ye tıklayın: Kalma: 2 sn (görüntü bulanıklığını önlemek için); Eğimli kamera: -90° (Nadir); Fotoğraf çekin.
- Görevi uygun bir adla kaydedin.
- Ek siteler için işlemi tekrarlayın.
2. Saha verilerinin toplanması ve son işleme
- Çalışma alanında gözlemlenen veya beklenen bitki örtüsünün kaydedilmesi
- Görüntüleri almadan önce, çalışma alanında gözlemlenen bitki örtüsünün bir listesini oluşturun. Bu, daha sonra fotoğraflı tanımlamaya yardımcı olmak için el yazısıyla yazılmış bir sayfada veya dijital bir formda yapılabilir. Alanda görülmesi muhtemel türlerin tarlada gözlenmese bile envantere dahil edilmesi faydalı olabilir (örneğin, ıslah tohum karışımları içindeki türler)18.
- Yer tabanlı görüntü elde etme
- Bir kamerayı dikey bir monopoda takın ve kamerayı yaklaşık 60° aşağı doğrultun. Görüntünün alanı, kameranın lens ve çözünürlük (megapiksel) özellikleri kullanılarak ve monopod standart bir yüksekliğe ayarlanarak belirlenebilir. Monopodun yüksekliği, kamera özellikleriyle birleştiğinde, zemin örnekleme mesafesini (GSD) belirleyecektir. Bu çalışmada, 12.1 megapiksellik bir kamera kullanılmış ve ~0.3 mm GSD18'de Nadir görüntüleri elde etmek için monopod yerden 1.3 m yükseklikte sabit bir konuma ayarlanmıştır.
- Monopodu öne doğru eğin, böylece kamera merceği Nadir konumda olur ve açılı monopod görüntüde görünmez.
- 1 m2 çerçevesiz çizim boyutu (veya istenen başka bir çizim boyutu) elde etmek için monopodun yüksekliğini veya lens üzerindeki yakınlaştırmayı ayarlayın. En yaygın 4:3 en-boy oranlı kameralar için, 115 cm'lik bir çizim genişliği, 1m2'lik bir görüntü alanı sağlar. Yere çerçeve yerleştirmeye gerek yoktur; Görüntünün tamamı olay örgüsüdür. Bunu gerçekleştirmek için lens üzerindeki yakınlaştırmayı ayarlıyorsanız, yakınlaştırma ayarında yanlışlıkla değişiklik yapılmasını önlemek için boyacı bandı kullanın.
- Mümkünse, görüntüde bulanıklığı önlemek için fotoğraf makinesini enstantane öncelikli moda ayarlayın ve enstantane hızını en az 1/125 s'ye ayarlayın; rüzgarlı ise daha hızlı.
- En iyileştirilmiş yol sırasındaki ilk noktayı bulun.
- Monopodu 1. noktada yere yerleştirin ve kamera Nadir yönüne gelene kadar monopodu eğin. Operatörün gölgesinin görüntüde olmadığından emin olun. Hareket bulanıklığını önlemek için kamerayı sabit tutun. Görüntüyü elde edin.
NOT: Bu adım için bir uzaktan tetikleme kablosu kullanışlıdır. - Başarılı veri yakalamayı sağlamak için görüntü kalitesini kontrol edin.
- En iyi duruma getirilmiş yol sırasındaki bir sonraki noktaya gidin ve alım adımlarını tekrarlayın.
- UAS görüntü alımı
- İHA'yı fırlatmadan önce, uçuş yolunda herhangi bir fiziksel engel olmadığından emin olmak için çalışma alanında kısa bir keşif yapın. Bu keşif tatbikatı, İHA'nın fırlatılacağı oldukça düz bir alanı bulmak için de yararlıdır.
- UAS'yi uçurmak için hava koşullarının uygun olduğundan emin olun: yeterli aydınlatma, minimum rüzgar (<17 knot) ve 0 °C–37 °C arasındaki sıcaklıklarla kuru, açık bir gün (>4,8 km görüş mesafesi).
- Yasal protokolleri takip edin. Örneğin ABD'de Federal Havacılık İdaresi politikaları izlenmelidir.
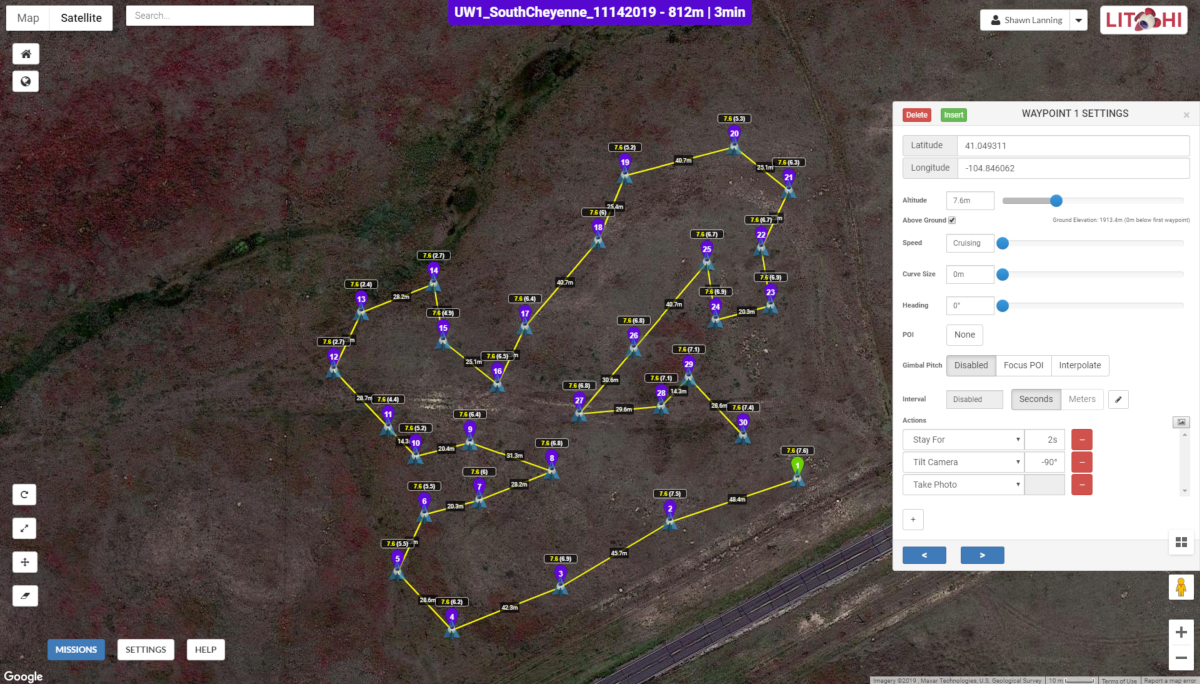
- Mission Hub yazılımını (Şekil 2) ve mobil cihazlar aracılığıyla erişilebilen bir görev yürütme uygulamasını (Şekil 3) kullanın.
- Adım 1.4'te açıklandığı gibi her BAS noktasında UAS görüntülerini toplayın.
- Konum değiştirmeden önce tüm görüntülerin mobil cihaz kullanılarak alındığını doğrulayın.

Şekil 2: Mission Hub'ın kullanıcı arayüzü. Harita, çalışma alanlarından biri boyunca bir dizi 30 BAS noktası boyunca drone uçuş yolunu gösterirken, açılır pencere her bir ara noktada görüntü alma parametrelerini gösterir. Şekil 2 , görünüş olarak Site 2'ye benzese de Site 1'e özgüdür. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Resim 3: Litchi'nin bir Android akıllı telefon üzerinde çalışan görev yürütme uygulamasındaki ara nokta uçuş görevi. Benzersiz ara nokta kimlikleri mor renkle gösterilir ve çalışma alanındaki çeşitli noktalarda görüntülerin çekildiği göreceli sırayı temsil eder. 7(6) gibi her bir ara noktadaki sayılar, görüntülerin çekildiği yerden yüksekliklerin (ilk sayı) ve ana noktanın veya drone fırlatma sahasının üzerindeki yüksekliklerin (ikinci sayı) tamsayı değerlerini gösterir. Haritada etiketlenmiş ardışık ara noktalar arasındaki mesafelere dikkat edin. Şekil 3 , görünüş olarak Site 2'ye benzese de Site 1'e özgüdür. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Zemin seviyesinde görüntü son işleme.
NOT: Talimatlar, eğitim bölümünde www.SamplePoint.org bir noktada mevcuttur; Ek bir .pdf dosyası ektedir.- Görüntüleri USB kablosu veya SD kart ile bir bilgisayara indirin.
- Görüntülerin doğru yerlerde çekildiğinden emin olun. Coğrafi etiketli görüntülerdeki meta verilere dayalı olarak görüntüleri CBS yazılımına yerleştirmek için çeşitli yazılımlar mevcuttur.
- Görüntüler birden fazla çalışma alanında elde edilmişse, bunları görüntü analizi için ayrı klasörlerde saklayın.
- UAS görüntü son işleme
- Çıkarılabilir bir microSD kartta kaydedilen görüntüleri UAS'tan bilgisayara aktarın.
- 2.4.2 ve 2.4.3 adımlarını tekrarlayın.
3. Görüntü analizi
NOT: Tüm Adımlar, www.SamplePoint.org'daki 'eğitim' bölümünde bulunabilir; Ek bir 'tutorial.pdf' dosyası eklenmiştir.
- SamplePoint'te Seçenekler | Veritabanı Sihirbazı | Veritabanı oluşturun/doldurun.
- Veritabanını çalışma alanına göre adlandırın.
- İstenen çalışma alanı örneklerini içeren klasöre gidin ve sınıflandırılacak olanları seçin.
- Bitti'yi tıklayın.
- Seçenekler | Veritabanı'nı seçin ve SamplePoint'in görüntü seçimine göre oluşturduğu *.xls dosyasını seçin (bu, görüntüde olacaktır).
- SamplePoint tarafından istendiğinde veritabanında doğru sayıda görüntünün seçildiğini onaylayın.
- Her görüntüde analiz edilmek üzere istediğiniz piksel sayısını seçin. Bu, bir ızgara düzeninde veya rastgele yapılabilir. Bu çalışmada, toplam 36 piksel seçmek için 6 x 6'lık bir ızgara kullanılmıştır, ancak sınıflandırma için istenen ölçüm hassasiyetine bağlı olarak görüntü başına daha fazla veya daha az piksel sınıflandırılabilir. Yakın zamanda yapılan bir araştırma, geniş alanları örneklemek için görüntü başına 20-30 pikselin yeterli olduğunu buldu31. Izgara seçeneği, görüntü yeniden analiz edildiğinde piksellerin aynı konumda olmasını sağlarken, rastgele seçenek, bir görüntü her yeniden yüklendiğinde rastgele pikseller oluşturur.
- Tür sınıflandırması için özel bir Button dosyası oluşturun. Bu liste, görüntü alınmadan önce tarlada kaydedilen bitki örtüsü listesinden oluşturulabilir veya çalışma alanıyla ilgili diğer bilgilere dayanabilir (örneğin, ıslah edilmiş alanlardaki tohum karışım listesi veya ekolojik alan tanımlama bilgileri, vb.). Çıplak Zemin veya Toprak ve Çöp veya Kaya gibi karşılaşılabilecek diğer olası bitki örtüsü olmayan öğeler için bir düğme oluşturulduğundan emin olun. Analistin türleri daha sonraki bir tarihte sınıflandırmasına izin vermek için bir Bilinmiyor düğmesi oluşturulması önerilir. SamplePoint'teki Açıklama Kutusu , bu seçeneğin kullanıldığı pikselleri not etmek için kullanılabilir. Ek olarak, görüntü çözünürlüğü tür seviyelerine göre sınıflandırmak için yeterince yüksek değilse, işlevsel gruplar (örneğin, Çimen, Forb, Çalı) için düğmeler oluşturmak faydalıdır.
- Kırmızı artı işaretinin hedeflediği görüntü pikselini tanımlayan sınıflandırma düğmesine tıklayarak görüntüleri analiz etmeye başlayın. SamplePoint "Tüm noktalar bu" uyarısını verene kadar bunu tekrarlayın. Sonraki resme tıklayın." Veritabanındaki tüm görüntüler için bu işlemi tekrarlayın.
NOT: Yakınlaştırma özelliği, sınıflandırmaya yardımcı olmak için kullanılabilir. - Veritabanındaki tüm görüntüler tamamen analiz edildiğinde, SamplePoint "Tüm görüntüleri tükettiniz" uyarısını verir. Bu noktada, Tamam'ı seçin ve ardından Seçenekler | İstatistik dosyaları oluşturun.
- Veritabanını içeren klasöre gidin ve tüm görüntülere ait verilerin depolandığından emin olmak için yeni oluşturulan *.csv dosyasını açın.
4. İstatistiksel analiz
- Bölgeler arasındaki farkları belirlemek için ki-kare analizleri
- Her iki bölgede de aynı sayıda görüntü (birincil örnekleme birimleri) ve pikseller (ikincil örnekleme birimleri) toplanıp analiz edildiğinden, iki site arasındaki karşılaştırma çok terimli tasarımın bir ürünü olarak kabul edilebilir.
- Adım 3.11'de oluşturulan *.csv dosyasını kullanarak, her sınıflandırma kategorisi için sınıflandırılan puanların toplamını hesaplayın.
- Nokta toplamları üzerinde ki-kare analizi yapın. Site 1 ve Site 2 birbirine benziyorsa, her bir kapak türü olarak sınıflandırılan yaklaşık olarak eşit sayıda piksel her iki sitede de belirgin olacaktır18.
- UAS ile yer seviyesindeki görüntüleri karşılaştırmak için regresyon
- Adım 3.11'de oluşturulan *.csv dosyalarını kullanarak, her görüntüden ortalama yüzde kapağını kopyalayıp yapıştırın ve UAS görüntü verilerini zemin seviyesindeki görüntü verileriyle hizalayın.
- Bir veritabanı programında regresyon analizi gerçekleştirin.
Access restricted. Please log in or start a trial to view this content.
Sonuçlar
UAS görüntü alımı, yer tabanlı görüntü toplama süresinin yarısından daha azını alırken, yer tabanlı görüntülerde analiz süresi biraz daha kısaydı (Tablo 1). Yer tabanlı görüntüler daha yüksek çözünürlüklüydü, bu da muhtemelen daha kısa sürede analiz edilmelerinin nedenidir. Siteler arasındaki yürüyüş yolu sürelerindeki farklılıklar, muhtemelen başlangıç ve bitiş noktalarının (fırlatma alanı) Site 1'e Site 2'den daha yak...
Access restricted. Please log in or start a trial to view this content.
Tartışmalar
Doğal kaynakların izlenmesinin önemi uzun zamandır bilinmektedir14. Küresel çevre konularına artan ilgiyle birlikte, zaman ve maliyet açısından verimli olan güvenilir izleme tekniklerinin geliştirilmesi giderek daha önemli hale gelmektedir. Daha önce yapılan birkaç çalışma, görüntü analizinin zaman, maliyet ve geçerli ve savunulabilir istatistiksel veriler sağlama açısından geleneksel bitki örtüsü izleme teknikleriyle olumlu bir şeki...
Access restricted. Please log in or start a trial to view this content.
Açıklamalar
Yazarlar herhangi bir çıkar çatışması beyan etmemektedir. Bu çalışmada kullanılan yazılım, açık kaynak olarak veya kurumsal izinler yoluyla yazarlara sunulmuştur. Hiçbir yazar, bu çalışmada kullanılan herhangi bir yazılım tarafından desteklenmemektedir ve benzer araştırma yapabilen başka yazılım programlarının mevcut olduğunu kabul etmektedir.
Teşekkürler
Bu araştırma çoğunlukla Wyoming Islah ve Restorasyon Merkezi ve Jonah Energy, LLC tarafından finanse edildi. Trimble Juno 5 ünitesini finanse ettikleri için Warren Resources ve Escelara Resources'a teşekkür ederiz. Wyoming'deki bitki örtüsünün izlenmesini finanse etmek için sürekli destek için Jonah Energy, LLC'ye teşekkür ederiz. Bu çalışmada kullanılan UAS ekipmanını sağladığı için Wyoming Coğrafi Bilgi Bilimi Merkezi'ne teşekkür ederiz.
Access restricted. Please log in or start a trial to view this content.
Malzemeler
| Name | Company | Catalog Number | Comments |
| ArcGIS | ESRI | GPS Software | |
| DJI Phantom 4 Pro | DJI | UAS | |
| G700SE | Ricoh | GPS-equipped camera | |
| GeoJot+Core | Geospatial Experts | GPS Software | Used to extract image metadata |
| Juno 5 | Trimble | Handheld GPS device | |
| Litchi Mission Hub | Litchi | Mission Hub Software | We chose Litchi for its terrain awareness and its ability to plan robust waypoint missions |
| Program R | R Project | Statistical analysis/programming software | |
| SamplePoint | N/A | Image analysis software |
Referanslar
- Follett, R. F., Reed, D. A. Soil carbon sequestration in grazing lands: societal benefits and policy implications. Rangeland Ecology & Management. 63, 4-15 (2010).
- Ritten, J. P., Bastian, C. T., Rashford, B. S. Profitability of carbon sequestration in western rangelands of the United States. Rangeland Ecology & Management. 65, 340-350 (2012).
- Stahl, P. D., Curran, M. F. Collaborative efforts towards ecological habitat restoration of a threatened species, Greater Sage-grouse, in Wyoming, USA. Land Reclamation in Ecological Fragile Areas. , CRC Press. Boca Raton, FL. 251-254 (2017).
- Stohlgren, T. J., Bull, K. A., Otsuki, Y. Comparison of rangeland vegetation sampling techniques in the central grasslands. Journal of Range Management. 51, 164-172 (1998).
- Lovett, G. M., et al. Who needs environmental monitoring. Frontiers in Ecology and the Environment. 5, 253-260 (2007).
- Cagney, J., Cox, S. E., Booth, D. T. Comparison of point intercept and image analysis for monitoring rangeland transects. Rangeland Ecology & Management. 64, 309-315 (2011).
- Toevs, G. R., et al. Consistent indicators and methods and a scalable sample design to meet assessment, inventory, and monitoring needs across scales. Rangelands. 33, 14-20 (2011).
- Stiver, S. J., et al. Sage-grouse habitat assessment framework: multiscale habitat assessment tool. Bureau of Land Management and Western Association of Fish and Wildlife Agencies Technical Reference. , (2015).
- West, N. E. Accounting for rangeland resources over entire landscapes. Proceedings of the VI Rangeland Congress. , Aitkenvale, Queensland, Australia. (1999).
- Curran, M. F., Stahl, P. D. Database management for large scale reclamation projects in Wyoming: Developing better data acquisition, monitoring, and models for application to future projects. Journal of Environmental Solutions for Oil, Gas, and Mining. 1, 31-34 (2015).
- International Technology Team (ITT). Sampling vegetation attributes. Interagency Technical Report. , Denver, CO, USA. (1999).
- Daubenmire, R. F. A canopy-coverage method of vegetational analysis. Northwest Science. 33, 43-64 (1959).
- Heady, H. F., Gibbens, R. P., Powell, R. W. Comparison of charting, line intercept, and line point methods of sampling shrub types of vegetation. Journal of Range Management. 12, 180-188 (1959).
- Levy, E. B., Madden, E. A. The point method of pasture analysis. New Zealand Journal of Agriculture. 46, 267-269 (1933).
- Morrison, L. W. Observer error in vegetation surveys: a review. Journal of Plant Ecology. 9, 367-379 (2016).
- Kennedy, K. A., Addison, P. A. Some considerations for the use of visual estimates of plant cover in biomonitoring. Journal of Ecology. 75, 151-157 (1987).
- Bergstedt, J., Westerberg, L., Milberg, P. In the eye of the beholder: bias and stochastic variation in cover estimates. Plant Ecology. 204, 271-283 (2009).
- Curran, M. F., et al. Spatially balanced sampling and ground-level imagery for vegetation monitoring on reclaimed well pads. Restoration Ecology. 27, 974-980 (2019).
- Duniway, M. C., Karl, J. W., Shrader, S., Baquera, N., Herrick, J. E. Rangeland and pasture monitoring: an approach to interpretation of high-resolution imagery focused on observer calibration for repeatability. Environmental Monitoring and Assessment. 184, 3789-3804 (2011).
- Curran, M. F., et al. Combining spatially balanced sampling, route optimization, and remote sensing to assess biodiversity response to reclamation practices on semi-arid well pads. Biodiversity. , (2020).
- Stevens, D. L., Olsen, A. R. Spatially balanced sampling of natural resources. Journal of the American Statistical Association. 99, 262-278 (2004).
- Robertson, B. L., Brown, J. A., McDonald, T., Jaksons, P. BAS: Balanced acceptance sampling of natural resources. Biometrics. 69, 776-784 (2013).
- Brown, J. A., Robertson, B. L., McDonald, T. Spatially balanced sampling: application to environmental surveys. Procedia Environmental Sciences. 27, 6-9 (2015).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. A modification of balanced acceptance sampling. Statistics & Probability Letters. 109, 107-112 (2017).
- Kermorvant, C., D'Amico, F., Bru, N., Caill-Milly, N., Robertson, B. Spatially balanced sampling designs for environmental surveys. Environmental Monitoring and Assessment. 191, 524(2019).
- Robertson, B. L., McDonald, T., Price, C. J., Brown, J. A. Halton iterative partitioning: spatially balanced sampling via partitioning. Environmental and Ecological Statistics. 25, 305-323 (2018).
- Hahsler, M., Hornik, K. TSP: Traveling Salesperson Problem (TSP). R package version 1.1-7. , Available from: https://CRAN.R-project.org/package=TSP (2019).
- Booth, D. T., Cox, S. E., Berryman, R. D. Point sampling imagery with 'SamplePoint'. Environmental Monitoring and Assessment. 123, 97-108 (2006).
- Bivand, R., Keitt, T., Rowlingson, B. rgdal: bindings for geospatial data abstraction library. R package version 1.2-7. , Available from: https://CRAN.R-project.org/package=rgdal (2017).
- McDonald, T. SDraw: spatially balanced sample draws for spatial objects. R package version 2.1.3. , Available from: https://CRAN.R-project.org/package=SDraw (2016).
- Ancin-Murguzur, F. J., Munoz, L., Monz, C., Fauchald, P., Hausner, V. Efficient sampling for ecosystem service supply assessment at a landscape scale. Ecosystems and People. 15, 33-41 (2019).
- Pilliod, D. S., Arkle, R. S. Performance of quantitative vegetation sampling methods across gradients of cover in Great Basin plant communities. Rangeland Ecology & Management. 66, 634-637 (2013).
- Anderson, K., Gaston, K. J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Frontiers in Ecology and the Environment. 11, 138-146 (2013).
- Barnas, A. F., Darby, B. J., Vandeberg, G. S., Rockwell, R. F., Ellis-Felege, S. N. A comparison of drone imagery and ground-based methods for estimating the extent of habitat destruction by lesser snow geese (Anser caerulescens caerulescens) in La Perouse Bay. PLoS One. 14 (8), 0217049(2019).
- Chabot, D., Carignan, V., Bird, D. M. Measuring habitat quality for leaster bitterns in a created wetland with use of small unmanned aircraft. Wetlands. 34, 527-533 (2014).
- Cruzan, M. B., et al. Small unmanned vehicles (micro-UAVs, drones) in plant ecology. Applications in Plant Sciences. 4 (9), 1600041(2016).
- Booth, D. T., Cox, S. E. Image-based monitoring to measure ecological change in rangeland. Frontiers in Ecology and the Environment. 6, 185-190 (2008).
- Crimmins, M. A., Crimmins, T. M. Monitoring plant phenology using digital repeat photography. Environmental Management. 41, 949-958 (2008).
- Kermorvant, C., et al. Optimization of a survey using spatially balanced sampling: a single-year application of clam monitoring in the Arcachon Bay (SW France). Aquatic Living Resources. 30, 37-48 (2017).
- Brus, D. J. Balanced sampling: a versatile approach for statistical soil surveys. Geoderma. 253, 111-121 (2015).
- Foster, S. D., Hosack, G. R., Hill, N. A., Barnett, N. S., Lucieer, V. L. Choosing between strategies for designing surveys: autonomous underwater vehicles. Methods in Ecology and Evolution. 5, 287-297 (2014).
Access restricted. Please log in or start a trial to view this content.
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır