
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
مجموعة أدوات تهتز عن طريق اللمس ومنصة محاكاة القيادة للأبحاث المتعلقة بالقيادة
In This Article
Erratum Notice
Summary
يصف هذا البروتوكول منصة محاكاة القيادة ومجموعة أدوات تهتز عن طريق اللمس للتحقيق في البحوث المتعلقة بالقيادة. كما يتم عرض تجربة مثالية لاستكشاف فعالية التحذيرات عن طريق اللمس.
Abstract
نظام التحذير من الاصطدام يلعب دورا رئيسيا في منع القيادة الانحرافات والقيادة النعاس. وقد أثبتت الدراسات السابقة مزايا تحذيرات اللمس في الحد من وقت استجابة السائق الفرامل. وفي الوقت نفسه، ثبتت فعالية التحذيرات عن طريق اللمس في طلب الاستيلاء على المركبات المستقلة جزئيا.
كيف يمكن تحسين أداء التحذيرات عن طريق اللمس هو موضوع بحث ساخن مستمر في هذا المجال. وهكذا، يتم تقديم برامج المحاكاة القيادة منخفضة التكلفة المعروضة وأساليب لجذب المزيد من الباحثين للمشاركة في التحقيق. وقد تم تقسيم البروتوكول المقدمة إلى خمسة أقسام: 1) المشاركين، 2) القيادة محاكاة تكوين البرمجيات، 3) إعداد محاكاة القيادة، 4) تهتز مجموعة أدوات التكوين والإعداد، و 5) إجراء التجربة.
في الدراسة المثالية ، ارتدى المشاركون مجموعة أدوات تهتز عن طريق اللمس وقاموا بمهمة راسخة تتبع السيارة باستخدام برنامج محاكاة القيادة المخصص. وكبحت السيارة الأمامية بشكل متقطع، وتم تسليم التحذيرات تهتز كلما كانت السيارة الأمامية الكبح. وصدرت تعليمات للمشاركين بالاستجابة في أسرع وقت ممكن للفرامل المفاجئة للسيارة الأمامية. تم تسجيل ديناميات القيادة، مثل وقت استجابة الفرامل ومعدل استجابة الفرامل، من قبل برنامج المحاكاة لتحليل البيانات.
ويقدم البروتوكول المقدم نظرة ثاقبة في استكشاف فعالية التحذيرات اللمسية على مواقع الجسم المختلفة. بالإضافة إلى مهمة السيارة التالية التي أظهرت في التجربة المثالية ، يوفر هذا البروتوكول أيضًا خيارات لتطبيق نماذج أخرى على دراسات محاكاة القيادة من خلال إجراء تكوين برامج بسيط دون أي تطوير للرموز. ومع ذلك ، من المهم ملاحظة أنه نظرًا لسعره المعقول ، فقد لا تتمكن برامج المحاكاة والأجهزة التي تم تقديمها هنا من التنافس بشكل كامل مع أجهزة محاكاة القيادة التجارية الأخرى عالية الدقة. ومع ذلك، يمكن أن يكون هذا البروتوكول بمثابة بديل ميسور التكلفة وسهل الاستخدام لمحاكاة القيادة التجارية العامة عالية الدقة.
Introduction
ووفقاً للبيانات التي كشفت عنها تقديرات الصحة العالمية في عام 2016، فإن الإصابات الناجمة عن حركة المرور هي السبب الثامن للوفيات العالمية، مما يؤدي إلى 1.4 مليون حالة وفاة في جميع أنحاء العالم1. وفي عام 2018، كانت 39.2٪ من حوادث المرور تصادماً مع السيارات في النقل، و7.2٪ منها كانت اصطدامات خلفية. والحلول التي يمكن من أجل زيادة سلامة المركبات والطرق هي تطوير نظام متطور للمساعدة على القيادة (ADAS) لتحذير السائقين الذين يعانون من مخاطر محتملة. وقد أظهرت البيانات أن ADAS يمكن أن تقلل إلى حد كبير من معدل الاصطدامات الخلفية، وأنها أكثر فعالية عندما مجهزة نظام الفرامل السيارات2. وبالإضافة إلى ذلك، ومع تطوير المركبات المستقلة، ستكون هناك حاجة إلى مشاركة أقل من البشر للسيطرة على السيارة، مما يجعل طلب الاقلاع عن نظام الإنذار (TOR) ضرورة عندما تفشل السيارة المستقلة في تنظيم نفسها. أصبح تصميم نظام الإنذار في نظام ADAS و TOR الآن جزءًا مهمًا من التكنولوجيا للسائقين لتجنب الحوادث الوشيكة في غضون ثوانٍ قليلة. واستخدمت التجربة النموذجية مجموعة أدوات تهتز إلى جانب منصة محاكاة للقيادة للتحقيق في الموقع الذي من شأنه أن يولد أفضل النتائج عندما يتم استخدام نظام تحذير vibrotactile كنظام تحذير محتمل من ADAS و TOR.
تصنف من خلال القنوات الإدراكية، وهناك عموما ثلاثة أنواع من طرائق الإنذار، وهذا هو البصرية، السمعية، واللمس. ولكل طريقة للإنذار مزاياها وحدودها. عندما يتم استخدام أنظمة الإنذار البصرية، يمكن للسائقين يعانون من الزائدالبصرية 3،ضعف أداء القيادة بسبب العمى الغفلة4،5. على الرغم من أن نظام التحذير السمعي لا يؤثر على مجال السائقين البصرية ، إلا أن فعاليته تعتمد بشكل كبير على المناطق المحيطة مثل الموسيقى الخلفية وغيرها من الضوضاء في بيئة القيادة6،7. وبالتالي، قد تؤدي المواقف التي تحتوي على معلومات سمعية خارجية أخرى أو ضوضاء كبيرة إلى الصمم الغفل8،9، مما يقلل من فعالية نظام التحذير السمعي. وبالمقارنة، فإن أنظمة الإنذار عن طريق اللمس لا تتنافس مع المعالجة البصرية أو السمعية للسائقين. عن طريق إرسال تحذيرات vibrotactile إلى السائقين، نظم الإنذار عن طريق اللمس التغلب على القيود المفروضة على أنظمة الإنذار البصرية والسمعية.
أظهرت الدراسات السابقة أن التحذيرات اللمسية يمكن أن تفيد السائقين عن طريق تقصير وقت استجابة الفرامل. كما تبين أن نظم الإنذار عن طريق اللمس تسفر عن نتيجة أكثر فعالية على البصرية10،11 و12السمعية،13،14 نظم الإنذار في حالات معينة. ومع ذلك، ركزت الأبحاث المحدودة على التحقيق في الموقع الأمثل لوضع جهاز إنذار عن طريق اللمس. وفقا لفرضية القشرة الحسية15 وفرضية المسافة الحسية16، اختارت الدراسة المثالية مناطق الإصبع والمعصم والمعبد كمواقع تجريبية لوضع جهاز تحذير عن طريق اللمس. مع إدخال البروتوكول ، يمكن تكوين التردد ووقت التسليم من تحذير تهتز ، وفترات بين الاهتزازات من مجموعة أدوات تهتز ، لتتناسب مع المتطلبات التجريبية. تتكون مجموعة الأدوات هذه المهتزة من شريحة رئيسية ، ورقاقة تنظيم الجهد ، ومضاعف ، وUSB لمحول الترانزستور الترانزستور - الترانزستور -Transistor-Logic (TTL) ، وترانزستور المعادن - أكسيد - أشباه الموصلات الميدانية (MOSFET) ، ووحدة بلوتوث. كما يمكن أن يختلف عدد الوحدات تهتز وفقا لاحتياجات الباحثين، مع ما يصل إلى أربع وحدات تهتز في نفس الوقت. عند تنفيذ مجموعة أدوات الاهتزاز في التجارب المتعلقة بالقيادة ، يمكن تكوينها لتناسب الإعدادات التجريبية وكذلك متزامنة مع بيانات أداء القيادة من خلال مراجعة رموز محاكاة القيادة.
بينما بالنسبة للباحثين ، وإجراء تجربة القيادة على منصة افتراضية أكثر جدوى مما كانت عليه في العالم الحقيقي بسبب المخاطر والتكلفة التي ينطوي عليها. فعلى سبيل المثال، قد يكون جمع مؤشرات الأداء صعباً، ومن الصعب التحكم في العوامل البيئية التي تنطوي عليها التجارب في العالم الحقيقي. ونتيجة لذلك، استخدمت العديد من الدراسات أجهزة محاكاة القيادة الثابتة القاعدة التي تعمل على أجهزة الكمبيوتر الشخصية في السنوات الأخيرة كبديل لإجراء دراسات القيادة على الطرق. بعد التعلم والتطوير والبحث لأكثر من 11 عامًا في مجتمع أبحاث القيادة ، أنشأنا منصة محاكاة للقيادة مع سيارة حقيقية تتكون من برنامج محاكاة قيادة مفتوح المصدر ومجموعة أجهزة ، بما في ذلك عجلة القيادة وعلبة التروس ، وثلاثة دواسات ، وثلاث أجهزة عرض محمولة ، وثلاث شاشات عرض. مع برنامج محاكاة القيادة يدعم شاشة واحدة فقط، استخدم البروتوكول المقدم فقط جهاز العرض المركزي وشاشة العرض لإجراء التجربة.
هناك نوعان من المزايا الرئيسية لاستخدام منصة محاكاة القيادة المعروضة. إحدى مزايا هذه المنصة هي أنها تستخدم برنامجًا مفتوح المصدر. باستخدام منصة سهلة الاستخدام مفتوحة المصدر ، يمكن للباحثين تخصيص مجموعة أدوات المحاكاة والاهتزاز لاحتياجاتهم البحثية الفريدة من خلال إجراء تكوين برامج بسيط دون أي تطوير التعليمات البرمجية. من خلال مراجعة الرموز ، يمكن للباحثين إنشاء محاكاة القيادة التي توفر الإخلاص النسبي للواقع مع الكثير من الخيارات المتاحة على أنواع السيارات ، وأنواع الطرق ، ومقاومة عجلة القيادة ، والاضطراب الجانبي والطولي للرياح ، والوقت والكابح واجهات برنامج تطبيق الحدث (APIs) لمزامنة البرامج الخارجية ، وتنفيذ النماذج السلوكية مثل مهمة متابعة السيارة ومهمة N-Back. على الرغم من أن إجراء البحوث ذات الصلة بالقيادة في محاكاة القيادة لا يمكن أن يكرر القيادة بشكل كامل في العالم الحقيقي ، فإن البيانات التي يتم جمعها من خلال جهاز محاكاة القيادة معقولة وقد تم اعتمادها على نطاق واسع من قبل الباحثين17،18.
ميزة أخرى لمحاكاة القيادة المقترحة هي تكلفتها المنخفضة. كما ذكر سابقا ، فإن برنامج محاكاة القيادة المقدم هو برنامج مفتوح المصدر متاح للمستخدمين مجانًا. بالإضافة إلى ذلك، التكلفة الإجمالية لإعداد الأجهزة بالكامل في هذا البروتوكول هو أقل مقارنة إلى محاكاة القيادة التجارية عالية الدقة النموذجية. يظهر الشكل 1 أ و ب الإعداد الكامل لجهازي محاكاة للقيادة بتكلفة تتراوح بين 3000 دولار إلى 30000 دولار. وعلى النقيض من ذلك، عادة ما تكلف محاكيات القيادة التجارية النموذجية عالية الدقة (قاعدة ثابتة) حوالي 10,000 دولار إلى 100,000 دولار. مع سعره بأسعار معقولة للغاية، يمكن أن يكون هذا محاكاة القيادة خيارا شعبيا ليس فقط لأغراض البحث الأكاديمي، ولكن أيضا لإجراء دروس القيادة19 ولتوضيح التكنولوجيات ذات الصلة القيادة20،21.

الشكل 1: صورة لمحاكاة القيادة. وتألفت كل من أجهزة محاكاة القيادة من عجلة القيادة وعلبة التروس، وثلاثة دواسات، وسيارة. (أ) جهاز محاكاة قيادة بقيمة 3000 دولار استخدم شاشة LCD مقاس 80 بوصة بدقة 3840 × 2160. (ب) جهاز محاكاة قيادة بقيمة 000 3 دولار يستخدم ثلاث أجهزة عرض مثبتة وثلاث شاشات عرض بُعد 223 × 126 سم لكل منها. وضعت شاشات العرض على بعد 60 سم فوق سطح الأرض و 22 سم من مقدمة السيارة. ولم تستخدم في التجربة الحالية سوى شاشة العرض المركزي وجهاز العرض. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
وقد تم بالفعل استخدام برنامج محاكاة القيادة ومجموعة أدوات الاهتزاز في الطريقة المقترحة في الدراسات السابقة من قبل باحثينا22،23،24،25،26،27،28،29. يمكن تطبيق هذه الأدوات ذاتية التطوير تهتز بعد معيار ISO30 في مجالات مختلفة31،32 عن طريق ضبط تردد الاهتزاز وكثافته. ومن المهم ملاحظة أنه تم تطوير نسخة أحدث من مجموعة الأدوات المهتزة وتم إدخالها في البروتوكول التالي. بدلا من ضبط تردد الاهتزاز باستخدام محول الجهد قابل للتعديل ، تم تجهيز الإصدار الأحدث بخمسة ترددات اهتزاز مختلفة ويمكن ضبطها بسهولة باستخدام الرموز المقدمة في ملف التشفير الإضافي 1. وعلاوة على ذلك، فإن محاكاة القيادة المقدمة توفر للباحثين طريقة آمنة وغير مكلفة وفعالة للتحقيق في أنواع مختلفة من البحوث ذات الصلة بالقيادة. وبالتالي، فإن هذا البروتوكول مناسب لمختبرات الأبحاث التي لديها ميزانية محدودة ولها حاجة قوية لتخصيص بيئات القيادة التجريبية.
Protocol
ملاحظة: تمت الموافقة على جميع الطرق المذكورة هنا من قبل مجلس المراجعة المؤسسية (IRB) في جامعة تسينغهوا وتم الحصول على الموافقة المستنيرة من جميع المشاركين.
1- المشاركون
- إجراء تحليل للطاقة لحساب العدد المطلوب من المشاركين للتوظيف وفقا للتصميم التجريبي لتحقيق القوة الإحصائية.
- تحقيق التوازن بين جنس المشاركين أثناء التوظيف قدر الإمكان.
- تأكد من أن المشاركين لديهم رخصة قيادة سارية المفعول و سنة واحدة على الأقل من تجربة القيادة.
- تأكد من أن المشاركين لديهم طبيعي أو تصحيح إلى الرؤية العادية باستخدام مخطط الرؤية.
- تأكد من أن المشاركين لم يستهلكوا الكحول أو المخدرات التي تؤثر على قدرات القيادة خلال 24 ساعة قبل تجربة33.
2. القيادة محاكاة تكوين البرمجيات
- أدخل مجلد برنامج محاكاة القيادة، متبوعاً بمجلد وقت التشغيل والمجلد Config. ثم افتح الملف "expconfig.txt" (أي، يجب أن يكون مسار الملف "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\").
- تحديد ما إذا كان لتطبيق أي تكوين أو المضي قدما في محاكاة القيادة باستخدام الإعدادات الافتراضية دون أي تكوين جديدة من مربع عن طريق الإشارة إلى التصميم التجريبي. يعرض الجدول 1 وصفاً مفصلاً للتكوينات الافتراضية لكافة الخيارات المتاحة.
- انتقل إلى القسم 3 من البروتوكول إذا لم يتم إجراء أية تغييرات.
| خيارات قابلة للتكوين | اوصاف | الإعدادات الافتراضية |
| endExpByTime | ما إذا كان أو لم يكن لاستخدام وقت الساعة كمشغل لإنهاء التجربة. | كاذبه |
| endExpAfterMinute | إنهاء التجربة بعد هذه الدقائق. | 10 |
| نهاية اكسبيديستي | سواء كان لاستخدام سيارة السائق أو لا قطع المسافة كمشغل لإنهاء التجربة. عند استخدام كل من الوقت والمسافة مشغلات، نهاية التجربة مع واحد يحدث أولا. | كاذبه |
| نهاية بعد المقياس | إنهاء التجربة بعد أن تم قطع هذه العدادات من خط البداية. | 5000 |
| تمكين "السماح بـ"الجبهة" | ما إذا كان لتمكين الرياح الأمامية، (أي قوة دفع السيارة إلى الاتجاه الخلفي) مع فاصل زمني عشوائي والمدة. | صحيح |
| الجبهةية وينتيرفالفالمن | الحد الأدنى للقيمة (ثواني) من الفاصل الزمني للرياح الأمامية. | 3 |
| فرونتاليينتنترفالماكس | الحد الأقصى لقيمة (ثواني) الفاصل الزمني للرياح الأمامية. | 13 |
| الجبهة وWindOwrationMin | الحد الأدنى لقيمة (ثانية) من مدة الرياح الأمامية. | 2 |
| الجبهة وينديوديويشنماكس | الحد الأقصى لقيمة (ثانية) من مدة الرياح الأمامية. | 3 |
| الجبهة وينفورافورمين | الحد الأدنى للقيمة (نيوتن) من قوة الرياح الأمامية. | 500 |
| فرونتالي ويندفوريماكس | القيمة القصوى (نيوتن) من قوة الرياح الأمامية. | 1000 |
| تمكينم السماح بـالترايندلالون | ما إذا كان لتمكين الرياح الجانبي (أي قوة دفع السيارة إلى الاتجاه الأيسر أو الأيمن) مع فاصل زمني عشوائي والمدة. | صحيح |
| فينتيرفالفالين | الحد الأدنى للقيمة (ثواني) من الفاصل الزمني للرياح الجانبي. | 3 |
| فيتالوينتنترفالماكس | الحد الأقصى لقيمة (ثواني) الفاصل الزمني للرياح الجانبي. | 8 |
| الجانبي ويندوديومنتمنتمنت | الحد الأدنى لقيمة (ثانية) من مدة الرياح الجانبي. | 2 |
| فيتال ويندوديويشنماكس | الحد الأقصى لقيمة (ثانية) مدة الرياح الجانبي. | 3 |
| فينومفوريرفاين | القيمة الدنيا (نيوتن) من قوة الرياح الجانبي. | 1000 |
| فيتال وينفورفورماكس | القيمة القصوى (نيوتن) من قوة الرياح الجانبي. | 2000 |
| leadCarConstantSpeedMPH | السرعة الثابتة للمركبة الرصاص (ميل في الساعة). | 40 |
| leadDistToStartWaiting | تبدأ السيارة الرائدة في انتظار سيارة السائق عندما تكون المسافة (متر) بين ذيل السيارة الرصاصية ورأس سيارة السائق أكبر من الرقم المشار إليه. | 100 |
| leadDistToStopWaiting | سوف تنتظر السيارة الرصاص حتى المسافة (متر) قبل سيارة السائق أصغر من هذا العدد. | 80 |
| الرصاصCarBrakeIntervalTimeMin | الحد الأدنى الفاصل الزمني العشوائي (ثواني) للمركبة الرائدة للفرامل. | 30 |
| الرصاصCarBrakeIntervalTimeMax | الحد الأقصى الفاصل الزمني العشوائي (ثواني) للمركبة الرائدة للفرامل. | 60 |
| الرصاصCarBrakeEventDuration | مدة الحدث الفرامل السيارة الرصاص (ثواني). | 5 |
| تمكينمرشداًسممساًدام | ما إذا كان لتمكين رسالة قصيرة خادم إعلام الصوت لعبت مع فترات عشوائية. | كاذبه |
| randSMSIntervalMin | الحد الأدنى الفاصل الزمني العشوائي (ثواني) من بداية إشعار SMS الأول إلى بداية إشعار SMS الثاني. | 2 |
| راندSMSIntervalMax | الحد الأقصى الفاصل الزمني العشوائي (ثواني) من بداية إعلام SMS الأول إلى بداية إشعار SMS الثاني. | 2 |
| تمكينمرشداًبنساً | ما إذا كان لتمكين N-back عدد الصوت لعبت مع فترات عشوائية. | كاذبه |
| randNbackIntervalMin | الحد الأدنى الفاصل الزمني العشوائي (ثواني) من بداية الصوت الأول إلى بداية الصوت الثاني. | 2.33 |
| randNbackIntervalMax | الحد الأقصى الفاصل الزمني العشوائي (ثواني) من بداية الصوت الأول إلى بداية الصوت الثاني. | 2.33 |
| تمكين تمكين الوصول إلى البيانات | ما إذا كان سيتم تمكين مزامنة بيانات طابع الوقت إلى IP شبكة اتصال محلية معينة. | كاذبه |
| تمكين ندسبداتادستدري | ما إذا كان سيتم تمكين البيانات لإرسالها إلى IP التالية لدراسة الإعلان. ملاحظة: تعارض مع enableUDPSendData. | كاذبه |
| UDPTargetIPa1 | عنوان IP لنقل UDP | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | منفذ UDP الهدف. | 1234 |
| UDPcycleNumber | التحكم في عدد مرات إرسال الطابع الزمني. سيتم إرسال البيانات بعد كل UDPcycleNumber من دورات TORCS مع كل دورة عادة ما تكون 20 مللي ثانية. | 1 |
| تمكين الاتصال بالشبكة | أم لا لتمكين QN - جافا محاكاة محرك الأقراص مع خادم UDP والعميل هي نفس الكمبيوتر. | كاذبه |
| UDPQNtoTORCSPort | ميناء UDP QN إلى رقم منفذ المحاكاة. | 5678 |
| UDPTORCStoQNPort | منفذ المحاكاة إلى رقم منفذ UDP QN. | 8765 |
| الرصاص كاركبراينقByWebCommand | ما إذا كان للاتصال بموقع على شبكة الانترنت لإشارة الكبح السيارة الرائدة. | كاذبه |
| Far_Point_Time_Ahead | المعلمة المستخدمة في نموذج التحكم في السيارة. | 2 |
| تمكين "كاريفلوينغ" | أم لا لتمكين سيارة محاكاة بعد مهمة في وضع التدريب. | / |
| carFollowTrainingWarningالاتنترفال | الفاصل الزمني من آخر ظهور لصوت التحذير إلى بداية التحذير التالي لوضع التدريب. | 2 |
الجدول 1: قائمة الإعدادات الافتراضية لبرنامج محاكاة القيادة. قائمة بالقيم الافتراضية لكافة الخيارات القابلة للتكوين المرتبطة ببرنامج محاكاة القيادة مع وصف مفصل لكل خيار.
- تكوين الإعدادات حول كيفية إنهاء التجربة استناداً إلى متغير التحكم المحدد للتصميم التجريبي.
- تقرر ما إذا كان لاستخدام وقت الساعة كمشغل لإنهاء التجربة مع الخيار "endExpByTime =" باستخدام إما صحيح أو خطأ كخيار من الخيارات. تعيين هذا الخيار إلى خطأ نسخ الدراسة المثالية.
- حدد ما إذا كان يجب إنهاء التجربة مع مرور الوقت كمشغل مع الخيار "endExpAfterMinute =" عن طريق إدخال عدد الدقائق في التنسيق مع منزل عشري واحد. الوقت الذي سافر يمكن أن يقرره الباحثون بالكامل. المدخلات 12 لتكرار الدراسة النموذجية.
- تعيين ما إذا كان لإنهاء التجربة مع المسافة المقطوعة كمشغل مع الخيار "endExpByDist =" باستخدام إما صحيح أو خطأ كخيار من الخيارات. لاحظ أنه عندما يتم تعيين كل من "endExpByTime =" و "endExpByDist =" الخيارات إلى True، سوف تنتهي التجربة مع الشرط الذي يتم أولاً. تعيين هذا الخيار إلى True لتكرار الدراسة المثالية.
- استخدم الخيار "endExpAfterMeter =" لتعيين المسافة المقطوعة من خط البداية بالأمتار في التنسيق مع منزل عشري واحد. يمكن أن يقرر الباحثون المسافة المقطوعة بالكامل. المدخلات 10000.0 لتكرار الدراسة المثالية.
- تكوين إعدادات الرياح لمحاكاة بيئة القيادة وفقا لسرعة الرياح34,35 مصممة للبيئة الافتراضية والحمل المعرفي36 أن تبدأ في التجربة.
- تعيين ما إذا كان لتمكين الرياح الأمامية مع الفاصل الزمني العشوائي والمدة مع الخيار "enableRandomFrontalWind =" باستخدام إما صحيح أو خطأ كخيار من الخيارات. تعيين هذا الخيار إلى True لتكرار الدراسة المثالية.
- تعريف الحد الأدنى والحد الأقصى الفاصل الزمني للرياح الأمامية مع الخيارات "frontalWindIntervalMin =" و "frontalWindIntervalMax =" بواسطة إدخال عدد الثواني في التنسيق مع منزل عشري واحد على التوالي. استخدم الإعداد الافتراضي (أي، 3.0 و 13.0 على التوالي) لتكرار الدراسة المثالية.
- تعريف الحد الأدنى والحد الأقصى مدة الرياح الأمامية مع خيارات "frontalWindDurationMin =" و "frontalWindDurationMax =" بواسطة إدخال عدد الثواني في التنسيق مع منزل عشري واحد على التوالي. استخدم الإعداد الافتراضي (أي 2.0 و 3.0 على التوالي) لتكرار الدراسة المثالية.
- تحديد الحد الأدنى والحد الأقصى قوة الرياح الأمامية مع خيارات "frontalWindForceMin =" و "frontalWindForceMax =" عن طريق الإشارة إلى مقدار القوة في نيوتن، على التوالي. استخدم الإعداد الافتراضي (مثل 500.0 و 1,000.0 على التوالي) لتكرار الدراسة المثالية.
- اختر ما إذا كنت تريد تمكين الرياح الجانبي مع فاصل زمني عشوائي والمدة مع الخيار "enableRandomLateralWind =" باستخدام إما صحيح أو خطأ كخيار من الخيارات. تعيين إلى True لتكرار الدراسة المثالية.
- تعريف الحد الأدنى والحد الأقصى الفاصل الزمني قوة الرياح الجانبي مع الخيارات "lateralWindIntervalMin =" و "lateralWindIntervalMax =" بواسطة إدخال عدد الثواني في التنسيق مع منزل عشري واحد على التوالي. استخدم الإعداد الافتراضي (أي 3.0 و 8.0 على التوالي) لتكرار الدراسة المثالية.
- تعريف الحد الأدنى والحد الأقصى مدة الرياح الجانبي مع الخيارات "lateralWindDurationMin =" و "lateralWindDurationMax =" بواسطة إدخال عدد الثواني في التنسيق مع منزلة عشرية واحدة على التوالي. استخدم الإعداد الافتراضي (أي 2.0 و 3.0 على التوالي) لتكرار الدراسة المثالية.
- تحديد الحد الأدنى والحد الأقصى قوة الرياح الجانبي مع خيارات "lateralWindForceMin =" و "lateralWindForceMax =" عن طريق الإشارة إلى مقدار القوة في نيوتن، على التوالي. استخدم الإعداد الافتراضي (أي 1,000.0 و 2,000.0 على التوالي) لتكرار الدراسة المثالية.
- تكوين إعدادات لسيارة محاكاة بعد المهمة وفقا لتصميم التجريبية ويحتاج35.
- تعيين السرعة الثابتة للمركبة الرصاص في ميل في الساعة مع منزلة عشرية واحدة باستخدام الخيار "leadCarConstantSpeedMPH =". المدخلات 40 لتكرار الدراسة المثالية.
- تحديد المسافة في متر مع منزلة عشرية واحدة بين السيارة الرصاص وسيارة السائق لتحريك السيارة الرائدة لبدء انتظار سيارة السائق للحاق بالركب، أو لاستئناف القيادة، مع "leadDistToStartWaiting =" و "leadDistToStopWaiting =" خيارات، على التوالي. استخدم الإعداد الافتراضي (أي، 100.0 و 80.0 على التوالي) لتكرار الدراسة المثالية.
- تعيين الفاصل الزمني الأقصى والحد الأدنى عشوائي من الأحداث الفرامل السيارة الرصاص مع الخيارات "leadCarBrakeIntervalTimeMin =" و "leadCarBrakeIntervalTimeMax =" عن طريق إدخال عدد الثواني في شكل مع منزل عشري واحد (على سبيل المثال، 30.0 و 60.0)، على التوالي. استخدم الإعداد الافتراضي (أي 30.0 و 60.0 على التوالي) لتكرار الدراسة المثالية.
- حدد مدة الحدث المكابح باستخدام خيار "leadCarBrakeEventDuration =" عن طريق إدخال عدد الثواني في التنسيق مع خانة عشرية واحدة. استخدم الإعداد الافتراضي (أي 5.0) لتكرار الدراسة المثالية.
- تكوين الإعدادات لصوت الإعلام رسالة قصيرة عشوائية وفقا لتصميم التجريبية والاحتياجات.
- تقرر ما إذا كان لتمكين خدمة الرسائل القصيرة (SMS) رسائل الإعلام الأصوات تشغيل مع فترات عشوائية مع صحيح أو خطأ كخيار خيارات الخيار "enableRandomSMSSound =". تعيين الخيار إلى خطأ لتكرار الدراسة المثالية.
- تعريف الفاصل الزمني الحد الأدنى والحد الأقصى من بداية إعلام SMS الأول إلى بداية الثانية من إعلام SMS باستخدام خيارات "randSMSIntervalMin =" و "randSMSIntervalMax =" ، عن طريق الإشارة إلى عدد الثواني في تنسيق مع منزلة عشرية واحدة (على سبيل المثال، 5.0 و 10.0) على التوالي.
- تكوين الإعدادات لمهمة N-back المحاكية37 وفقا لتصميم التجريبية والاحتياجات.
- تعيين N-back الأصوات رقم لتشغيل مع فواصل زمنية عشوائية مع صحيح أو خطأ كخيار خيارات الخيار "enableRandomNbackSound =". تعيين الخيار إلى خطأ لتكرار الدراسة المثالية.
- تعريف الحد الأدنى والحد الأقصى الفاصل الزمني من إزاحة الصوت الأول إلى بداية الصوت الثاني باستخدام خيارات "randNbackIntervalMin =" و "randNbackIntervalMax =" للإشارة إلى عدد الثواني في التنسيق مع منزلة عشرية واحدة (على سبيل المثال، 5.0 و 10.0) على التوالي.
- تكوين إعدادات بروتوكول مخطط بيانات المستخدم (UDP) إذا كان نقل بيانات UDP مطلوبًا للتجربة.
- تقرر ما إذا كان سيتم تمكين UDP لنقل البيانات عن طريق السماح مزامنة بيانات الطابع الزمني إلى عنوان IP شبكة محلية معينة عبر الخيار "enableUDPSendData =" باستخدام صواب أو خطأ كخيار من الخيارات. تمكين هذا الخيار لتكرار الدراسة المثالية.
- حدد ما إذا كان لتمكين UDP لنقل البيانات إلى عنوان IP محدد لدراسة إعلانية عبر الخيار "enableUDPSendDataAdStudy =" باستخدام True أو False كخيار من الخيارات. كما يتم تذكير أن هذا الخيار يتعارض مع "enableUDPSendData =" ولا يمكن تعيين كلا الخيارين إلى True في نفس الوقت. تعيين الخيار إلى خطأ لتكرار الدراسة المثالية.
- تحديد عنوان IP لنقل UDP عن طريق تحديد كل قسم من عنوان IP باستخدام "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =", و "UDPTargetIPa4 =".
- الإشارة إلى رقم المنفذ المستهدف تحت "UDPTargetPort =".
- تعيين تكرار البيانات لإرسالها ضمن "UDPcycleNumber =" مع أي عدد صحيح أكبر من أو يساوي دورة "1" في كل دورة هو 20 مللي ثانية.
- تكوين شبكة UDP قائمة الانتظار (QN) نموذج38 اتصال مع الإشارة إلى التصميم التجريبي والاحتياجات.
- تعيين ما إذا كان أو لم يكن لتمكين محاكاة محرك الأقراص QN-Java التي، خادم UDP والعميل يشاركون نفس الكمبيوتر، مع الخيار "enableUDPQNConnection =" باستخدام صحيح أو خطأ كخيارات. تعطيل هذا الخيار لتكرار الدراسة المثالية.
- الإشارة إلى الرقم من منفذ QN UDP إلى منفذ المحاكاة ضمن الخيار "UDPQNtoTORCSPort =".
- الإشارة إلى الرقم من منفذ المحاكاة إلى منفذ QN UDP ضمن الخيار "UDPTORCStoQNPort =".
- تكوين ما إذا كان للاتصال إلى موقع على شبكة الانترنت لإشارات الكبح وفقا للتصميم التجريبي في إطار خيار "leadCarBrakingByWebCommand =" باستخدام صحيح أو خطأ كخيارات. الرجاء ملاحظة أنه عند تعيين هذا الخيار إلى True ، "endExpByTime =" و "endExpAfterMinute =" ستتوقف عن العمل. تعيين الخيار إلى خطأ لتكرار الدراسة المثالية.
- تعيين ما إذا كان لتمكين السيارة محاكاة بعد مهمة في وضع التدريب مع "تمكينCarFollowingTraining =" باستخدام صحيح أو خطأ كخيارات.
- تعريف الفاصل الزمني من بداية تحذير آخر إلى بداية تحذير الصوت التالي من التدريب مع الخيار "carFollowTrainingWarningInterval" عن طريق الإشارة إلى عدد الثواني مع منزل عشري واحد (على سبيل المثال، 2.0).
- حفظ الملف عند إكمال التكوين.
3. القيادة محاكاة إعداد
- قم بتوصيل عجلة القيادة وجهاز العرض المركزي (جهاز عرض مُثبت بنسبة عرض إلى ارتفاع 16:10، و192 – 240 هرتز، ومعالجة الألوان 8 بت) بالكمبيوتر. وضعت شاشة عرض ببعد 223 × 126 سم على بعد 60 سم فوق سطح الأرض و 22 سم بعيدا عن مقدمة المركبة المُعدة.
- تعيين دقة الشاشة ضمن خيارات | عرض، لمطابقة حجم الشاشة عند بدء تشغيل برنامج محاكاة القيادة.
- أدخل صفحة تكوين لتحديد لاعب واتبع الإرشادات التي يوفرها البرنامج لمعايرة عجلة القيادة، والمسرع، ودواسة الفرامل. وتشمل هذه تحول عجلة القيادة والضغط على دواسة البنزين والفرامل حسب التعليمات.
4. تشكيل مجموعة أدوات الاهتزاز وإعداد
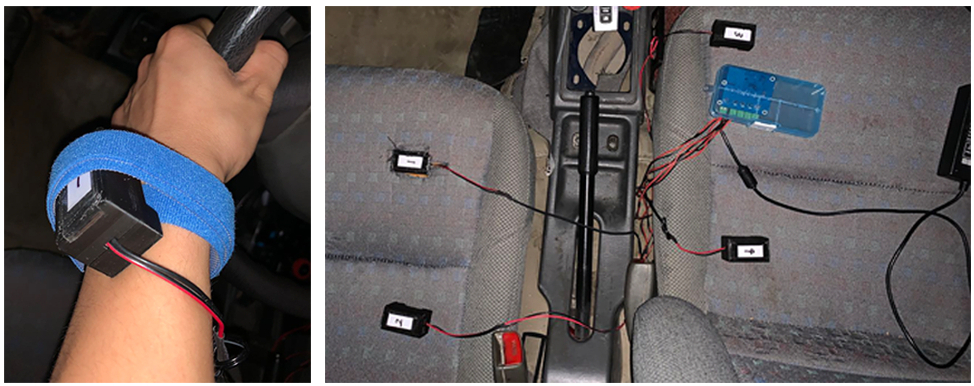
- قم بتوصيل مجموعة الأدوات المهتزة بمزود الطاقة. كل من الوحدات الأربعة له بعد 67 × 57 × 29 مم.

الشكل 2: صور لمجموعة الأدوات المهتزة. وتتكون مجموعة الأدوات المهتزة من أربع وحدات فردية يمكن تنشيطها بشكل منفصل. كل وحدة لها بعد 67 × 57 × 29 مم. الرجاء انقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- قم بتشغيل مجموعة الأدوات المهتزة وتوصيل مجموعة الأدوات بالكمبيوتر عبر البلوتوث.
- تحديد تردد الاهتزاز الذي سيتم استخدامه في التجربة عند إكمال اختبار تحسس البشرة التجريبي أو وفقًا للاحتياجات التجريبية.
- تعيين تردد الاهتزاز إلى 70 هرتز39،40،41 باستخدام الرموز المقدمة كملف التشفير التكميلي 1. تتوفر حاليًا مستويات التردد الخمسة (أي 14 هرتز و 28 هرتز و 42 هرتز و 56 هرتز و 70 هرتز) مع كل تحفيز اهتزاز يدوم لمدة 0.5 s بشكل افتراضي.
- استخدم الرموز المتوفرة كملف ترميز إضافي 1 لمزامنة أحداث الفرامل من برنامج محاكاة القيادة ومجموعة أدوات الاهتزاز. ويبين الشكل 3 لقطة شاشة من الرموز التي سيتم تنقيحها كمرجع.

الشكل 3: لقطة شاشة تحمل عنواناً للرموز في ملف التشفير التكميلي 1. يمكن استخدام لقطة شاشة الرموز المسماة كمرجع أسهل لتكوين مجموعة الأدوات المهتزة وإعدادها. وتستخدم هذه الرموز لتعيين تردد الاهتزاز من مجموعة الأدوات، ومزامنة أحداث الفرامل في برنامج محاكاة القيادة ومجموعة أدوات تهتز لتوليد تحذيرات تهتز. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
5. إجراء التجربة
- توجيه المشاركين لقراءة وتوقيع نموذج الموافقة المستنيرة الذي يقدم العملية التجريبية وإعلان أن الدراسة هي لتقييم أداء القيادة عند الوصول إلى المختبر.
- مساعدة المشاركين لضبط مسافة المقعد إلى دواسة وتعيين مسند الظهر إلى وضع مريح يدويا.
- تعليم المشاركين كيفية تشغيل جهاز المحاكاة، بما في ذلك عجلة القيادة، دواسة الفرامل، ودواسة المسرع.
- تعليمات المشاركين لدفع كما يفعلون في العالم الحقيقي، ومتابعة السيارة أمامهم والحفاظ على التقدم الثانيتين وراء ذلك. ويبين الشكل 4 خريطة الطريق المستخدمة لمحاكاة القيادة.

الشكل 4: خريطة الطريق المستخدمة لمحاكاة القيادة. الطريق المستخدم هو طريق ذو اتجاه واحد مع أربعة منحنيات (الطول الأقصى 15000 متر) ، وثلاثة ممرات ، وبدون إشارات مرورية. برنامج محاكاة القيادة يقدم خيارات أخرى لتصميم الطرق مثل خيارات لتشمل علامات الطريق أو اللوحات الإعلانية. كما يتوفر إصدار متوافق مع EEG. ويمكن تعديل جميع هذه المعلمات، إذا لزم الأمر. الرجاء النقر هنا لعرض نسخة أكبر من هذا الرقم.
{kind=link}
- إبلاغ المشاركين بالفرامل في أقرب وقت ممكن كلما كانت فرامل السيارة الأمامية، حتى لو كان السيناريو لا يتطلب استجابة الفرامل. سوف تضيء المصابيح الخلفية للسيارة الأمامية في القيادة في العالم الحقيقي للإشارة إلى حدث الفرامل.
- تزويد المشاركين مع تجربة الممارسة 5 دقائق لتعلم كيفية الحفاظ على مسافة تقدم ثانية اثنين وراء السيارة الأمامية. تجربة الممارسة تتضمن مجموعة من 5 فرامل عشوائية.
- خلال التجربة الممارسة، إذا كان المشاركون أقل من 1.5 s وراء السيارة الأمامية، فإن برنامج محاكاة القيادة تلعب موجه مع صوت أنثى "قريبة جدا، يرجى إبطاء".
- إذا كان المشاركون بين 2.25 إلى 2.5 ق وراء السيارة الأمامية، فإن برنامج محاكاة القيادة سوف تلعب موجه مع صوت الإناث "بعيدا جدا، يرجى تسريع".
- لا تقم بتضمين بيانات من تجربة الممارسة للتحليل.
- دع المشاركين يعرفون أنه يمكن إيقاف الدراسة دون أي عقوبة عن طريق إخطار المجربين في أي وقت، إذا لزم الأمر.
- ابدأ التجربة الرسمية بمجرد أن يكمل المشاركون جلسة التدريب العملي ويمكنهم الحفاظ على مسافة ثابتة بعد ذلك.
- ابدأ الدورة التجريبية الرسمية، والتي تتكون من أربع كتل (أي الإصبع والمعصم والمعبد والقيادة فقط) مع 13 حدث فرملة عشوائية في كل كتلة، مما أدى إلى ما مجموعه 52 تجربة تجريبية. يتم موازنة ترتيب الشروط مع تصميم مربع اللاتينية. ولا تقدم أية مطالبة صوتية في المحاكمات الرسمية.
- مساعدة المشاركين على وضع مجموعة أدوات تهتز باستخدام الشريط الطبي قبل كل كتلة من التجارب وفقا للشروط المعينة. تحذر مجموعة الأدوات المهتزة (إذا ارتدت) المشاركين من الفرامل عندما تكون السيارة الأمامية مكبحة. تضيء المصابيح الخلفية للسيارة الأمامية في كل مرة تعمل فيها فرامل السيارة الأمامية.
- تأكد من أن المشاركين تعطى 2 دقيقة من الراحة عند الانتهاء من كل كتلة للحد من الآثار حمل.
- اسأل المشاركين عن موقعهم المفضل لمجموعة الأدوات المهتزة وشدة الاهتزاز المتصورة مع مقياس Likert من 7 نقاط عند الانتهاء من جميع التجارب. كما يتم تسجيل معدل استخدام كل إكسسوارات يمكن ارتداؤها يوميًا (أي، الساعة، النظارات، سماعات الأذن، والحلقة). في مقياس تفضيل لموقع مجموعة الأدوات تهتز، "1" يمثل "الأقل المفضلة" و "7" يمثل "الأكثر المفضلة"، بينما في مقياس كثافة الاهتزاز "1" يمثل "ضعف الشعور" و "7" يمثل "شعور قوي".
6 - تحليل البيانات
- جمع بيانات سلوك القيادة للمشاركين في 50 هرتز باستخدام برنامج محاكاة القيادة، بما في ذلك وقت استجابة الفرامل، وسرعة السيارة، ومعدل عكس عجلة القيادة، موقف حارة (SDLP)، والمسافة الأمامية، الخ.
- إجراء تحليل البيانات لأداء السائقين.
- إجراء تحليل خارج عن النطاق باستخدام التوزيع العادي مع قطع كثلاثة انحرافات معيارية عن الوسط لتحديد البيانات التي يجب إدراجها لمزيد من التحليل.
- حساب وقت استجابة الفرامل عن طريق طرح الوقت عندما تكون عربة المشارك الفرامل (أي الحد الأدنى من 1٪ من دواسة الفرامل36،42) من الوقت عندما تبدأ السيارة الأمامية في الفرامل.
- تسمية البيانات بأنها "لا استجابة الفرامل" إذا كان وقت استجابة الفرامل أكبر من أو يساوي 5 s (أي، فشل في الفرامل في غضون 5 s بعد فرامل السيارة الأمامية).
- قسّم عدد المكابح الناجحة على إجمالي عدد المكابح التي تقوم بها المركبة الأمامية لحساب معدل استجابة الفرامل.
- متوسط جميع قيم كل مشارك للحصول على متوسط معدل استجابة الفرامل ووقت استجابة الفرامل لكل حالة وحساب الانحراف المعياري على تلك القيم لإجراء المزيد من التحليلات.
النتائج
الدراسة المثالية المذكورة في هذه الورقة أجرت مهمة متابعة السيارة باستخدام جهاز محاكاة القيادة ومجموعة الأدوات تهتز، والتي تم نشرها أيضا سابقا في مجلةأكاديمية 22. ومن الجدير بالذكر أن النسخة القديمة من مجموعة الأدوات المهتزة قد استخدمت عند إجراء الدراسة النموذجية، في حين تم ?...
Discussion
تحاكي منصة محاكاة القيادة ومجموعة الأدوات المهتزة بشكل معقول تطبيق الأجهزة vibrotactile المحتملة التي يمكن ارتداؤها في الحياة الحقيقية ، مما يوفر تقنية فعالة في التحقيق في البحوث المتعلقة بالقيادة. مع استخدام هذه التكنولوجيا، بيئة تجريبية آمنة مع تكوين عالية والقدرة على تحمل التكاليف متاحة ا...
Disclosures
ولم يعلن أصحاب البلاغ عن أي إفصاح مالي أو تضارب في المصالح.
Acknowledgements
وقد رعت هذا المشروع مؤسسة بيجين للمواهب.
Materials
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
References
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved