A subscription to JoVE is required to view this content. Sign in or start your free trial.
Methods Article
ערכת כלים רוטטת מישוש ופלטפורמת הדמיית נהיגה למחקר הקשור לנהיגה
In This Article
Summary
פרוטוקול זה מתאר פלטפורמת סימולציית נהיגה וניתוח כלים רוטט מישוש לחקירת מחקר הקשור לנהיגה. מוצג גם ניסוי מופתי הבוחן את האפקטיביות של אזהרות מישוש.
Abstract
מערכת התרעת התנגשות ממלאת תפקיד מרכזי במניעת הסחות דעת נהיגה ונהיגה מנומנמת. מחקרים קודמים הוכיחו את היתרונות של אזהרות מישוש בהפחתת זמן תגובת הבלמים של הנהג. במקביל, הוכחו אזהרות מישוש יעילות בבקשת השתלטות (TOR) על כלי רכב אוטונומיים חלקית.
כיצד ניתן למטב את הביצועים של אזהרות מישוש הוא נושא מחקר חם מתמשך בתחום זה. לכן, תוכנות סימולציה נהיגה בעלות נמוכה הציגו שיטות כדי למשוך חוקרים נוספים לקחת חלק בחקירה. הפרוטוקול שהוצג חולק לחמישה חלקים: 1) משתתפים, 2) תצורת תוכנת סימולציית נהיגה, 3) הכנת סימולטור נהיגה, 4) תצורה והכנה של ערכת כלים רוטטת, ו -5) ביצוע הניסוי.
במחקר המופתי, המשתתפים לבשו את ערכת הכלים רוטט מישוש וביצעו משימה מבוססת רכב הבא באמצעות תוכנת סימולציה נהיגה אישית. הרכב הקדמי בלם לסירוגין, ואזהרות רוטטות נמסרו בכל פעם שהרכב הקדמי בלם. המשתתפים הונחו להגיב במהירות האפשרית לבלמים הפתאומיים של הרכב הקדמי. דינמיקת הנהיגה, כגון זמן תגובת הבלמים וקצב תגובת הבלמים, תועדה על ידי תוכנת הסימולציה לניתוח נתונים.
הפרוטוקול המוצג מציע תובנה על חקר האפקטיביות של אזהרות מישוש על מיקומי גוף שונים. בנוסף למשימה הבאה המכונית כי הוא הוכיח בניסוי למופת, פרוטוקול זה מספק גם אפשרויות ליישם פרדיגמות אחרות על מחקרי סימולציה נהיגה על ידי ביצוע תצורת תוכנה פשוטה ללא כל פיתוח קוד. עם זאת, חשוב לציין כי בשל מחיר סביר שלה, התוכנה סימולציה נהיגה וחומרה הציג כאן לא יוכלו להתחרות באופן מלא עם סימולטורים אחרים נהיגה מסחרית נאמנות גבוהה. עם זאת, פרוטוקול זה יכול לשמש כחלופה סבירה וידידותית למשתמש לסימולטורים המסחריים הכלליים לנהיגה בנאמנות גבוהה.
Introduction
על פי הנתונים שנחשפו על ידי הערכות הבריאות העולמיות בשנת 2016, פציעה בתנועה היא הגורם השמיני למקרי מוות עולמיים, מה שמוביל ל -1.4 מיליון מקרי מוות ברחבי העולם1. בשנת 2018, 39.2% מתאונות הדרכים היו התנגשויות עם כלי רכב מנועיים בתחבורה, ו-7.2% מהן היו התנגשויות עורפיות. פתרון להגברת הבטיחות ברכב ובכביש הוא פיתוח מערכת סיוע מתקדמת לנהיגה (ADAS) כדי להזהיר נהגים מפני סכנות פוטנציאליות. נתונים הראו כי ADAS יכול להפחית באופן משמעותי את קצב ההתנגשויות העורפיות, והוא יעיל עוד יותר כאשר מצויד במערכת בלמים אוטומטית2. בנוסף, עם פיתוח כלי רכב אוטונומיים, תידרש מעורבות אנושית פחותה לשליטה ברכב, מה שהופך את מערכת ההתרעה על בקשת השתלטות (TOR) לצורך כאשר הרכב האוטונומי אינו מצליח לווסת את עצמו. העיצוב של מערכת ההתרעה ADAS ו TOR הוא עכשיו פיסת טכנולוגיה חשובה עבור נהגים כדי למנוע תאונות קרובות בתוך כמה שניות. הניסוי המופתי השתמש בארגז כלים רוטט יחד עם פלטפורמת סימולציית נהיגה כדי לחקור איזה מיקום יפיק את התוצאה הטובה ביותר כאשר מערכת התרעה vibrotactile שימשה כמערכת התראה פוטנציאלית ADAS ו TOR.
מסווגים לפי ערוצים תפיסתיים, קיימים בדרך כלל שלושה סוגים של אופני אזהרה, כלומר חזותיים, שמיעתיים ומישושיים. לכל מודאליות אזהרה יש יתרונות ומגבלות משלה. כאשר מערכות התראה חזותית נמצאות בשימוש, נהגים עלולים לסבול מעומס ראייה3, פגיעה בהופעות הנהיגה עקב עיוורון לא קשוב4,5. למרות שמערכת התרעה שמיעתית אינה משפיעה על שדה הראייה של הנהגים, יעילותה תלויה מאוד בסביבה כגון מוזיקת רקע ורעשים אחרים בסביבת הנהיגה6,7. לכן, מצבים המכילים מידע שמיעתי חיצוני אחר או רעש משמעותי עלול להוביל חירשות קשובה8,9, הפחתת האפקטיביות של מערכת אזהרה שמיעתית. לשם השוואה, מערכות התרעה מישוש אינן מתחרות בעיבוד החזותי או השמיעתי של הנהגים. על ידי שליחת אזהרות vibrotactile לנהגים, מערכות אזהרה מישוש להתגבר על המגבלות של מערכות התראה חזותית ושמיעתית.
מחקרים קודמים הראו כי אזהרות מישוש יכול להועיל לנהגים על ידי קיצור זמן תגובת הבלמים שלהם. כמו כן נמצא כי מערכות התרעה מישוש להניב תוצאה יעילה יותר על חזותי10,11 ו שמיעתי12,13,14 מערכות אזהרה במצבים מסוימים. עם זאת, מחקר מוגבל התמקד בחקירת המיקום האופטימלי להצבת התקן אזהרה מישוש. על פי השערת קליפת המוח החושית15 והשערת המרחק החושי16, המחקר המופתי בחר באזורי האצבע, פרק כף היד והמקדש כמיקומים ניסיוניים להצבת מכשיר אזהרה מישוש. עם הפרוטוקול שהוצג, ניתן להגדיר את התדירות ואת זמן מתן הזמן של אזהרה רוטטת, ומרווחים בין תנודות של ערכת הכלים רוטט, כדי להתאים לדרישות הניסוי. ערכת כלים רוטטת זו כללה שבב ראשי, שבב וסת מתח, מולטיפלקסר, מתאם USB לטרנזיסטור-טרנזיסטור-לוגיקה (TTL), טרנזיסטור אפקט שדה (MOSFET) של תחמוצת מתכת ומודול Bluetooth. מספר המודולים הרוטטים יכול להשתנות גם בהתאם לצורכי החוקרים, כאשר עד ארבעה מודולים רוטטים בו זמנית. בעת יישום ערכת הכלים רוטט בניסויים הקשורים לנהיגה, זה יכול להיות מוגדר כדי להתאים את ההגדרות הניסיוניות, כמו גם מסונכרן עם נתוני ביצועים נהיגה על ידי שינוי הקודים של סימולציית הנהיגה.
בעוד עבור חוקרים, ביצוע ניסוי נהיגה בפלטפורמה וירטואלית הוא ריאלי יותר מאשר בעולם האמיתי בשל הסיכון והעלות הכרוכים בכך. לדוגמה, איסוף מדדי ביצועים יכול להיות קשה, וקשה לשלוט בגורמים הסביבתיים המעורבים כאשר ניסויים נערכים בעולם האמיתי. כתוצאה מכך, מחקרים רבים השתמשו בסימולטורים לנהיגה בבסיס קבוע הפועלים על מחשבים בשנים האחרונות כחלופה לביצוע מחקרי נהיגה בדרכים. לאחר שלמדנו, פיתחנו וחקרנו במשך למעלה מ-11 שנים בקהילת מחקר הנהיגה, הקמנו פלטפורמת הדמיית נהיגה עם מכונית אמיתית המורכבת מתוכנת הדמיית נהיגה בקוד פתוח וערכת חומרה, הכוללת הגה ותיבת הילוכים, שלושה דוושות, שלושה מקרנים רכובים ושלושה מסכי מקרן. עם תוכנת סימולציית הנהיגה תומכת במסך אחד בלבד, הפרוטוקול המוצג השתמש רק במקרן המרכזי ובמסך המקרן כדי לבצע את הניסוי.
ישנם שני יתרונות עיקריים של שימוש בפלטפורמת סימולציית הנהיגה המוצגת. אחד היתרונות של פלטפורמה זו הוא שהיא משתמשת בתוכנת קוד פתוח. באמצעות פלטפורמת הקוד הפתוח הידידותית למשתמש, החוקרים יכולים להתאים אישית את ערכת הכלים הסימולציה והרוטטת לצרכי המחקר הייחודיים שלהם על ידי יצירת תצורת תוכנה פשוטה ללא כל פיתוח קוד . על ידי שינוי הקודים, החוקרים יכולים ליצור סימולציות נהיגה המספקות נאמנות יחסית למציאות עם שפע של אפשרויות זמינות על סוגי רכב, סוגי כבישים, התנגדות להגה, מערבולת רוח לרוחב ואורך, ממשקי תוכנית יישום אירוע זמן ובלמים (API) לסנכרון תוכנה חיצונית, ויישום פרדיגמות התנהגותיות כגון המשימה הבאה לרכב ומשימת N-Back. למרות ביצוע מחקר הקשור לנהיגה בסימולטור נהיגה לא יכול לשכפל באופן מלא נהיגה בעולם האמיתי, נתונים שנאספו באמצעות סימולטור נהיגה הוא סביר ואומץ נרחב על ידי חוקרים17,18.
יתרון נוסף של סימולטור הנהיגה המוצע הוא העלות הנמוכה שלה. כפי שהוזכר קודם לכן, תוכנת סימולציית הנהיגה שהוצגה היא תוכנת קוד פתוח הזמינה למשתמשים ללא תשלום. בנוסף, העלות הכוללת של התקנת החומרה כולה בפרוטוקול זה נמוכה יותר בהשוואה לסימולטורים מסחריים טיפוסיים לנהיגה בנאמנות גבוהה. איור 1 a ו- b מציגים את ההתקנה המלאה של שני סימולטורים לנהיגה בעלות הנעה בין $3000 ל$ $30000. לעומת זאת, סימולטורים מסחריים טיפוסיים לנהיגה בנאמנות גבוהה (בסיס קבוע) עולים בדרך כלל בסביבות $10,000 עד $100,000. עם מחיר סביר מאוד שלה, סימולטור נהיגה זה יכול להיות בחירה פופולרית לא רק למטרות מחקר אקדמי, אלא גם לניהול שיעורי נהיגה19 ולהדגמה של טכנולוגיות הקשורות לנהיגה20,21.

איור 1: תמונה של סימולטורים לנהיגה. שני סימולטורים לנהיגה כללו הגה ותיבת הילוכים, שלושה דוושות ורכב. (א) הגדרת סימולטור נהיגה $סך $3000 שהשתמשה במסך LCD בגודל 80 אינץ' ברזולוציה של 3840 × 2160. (ב) הגדרת סימולטור נהיגה בסך $30000 שהשתמשה בשלושה מקרנים נטענים וב-3 מסכי מקרן עם ממד של 223 x 126 ס"מ כל אחד. מסכי ההקרנה הונחו 60 ס"מ מעל פני הקרקע ו-22 ס"מ מחזית הרכב. רק המקרן המרכזי ומסך המקרן שימשו לניסוי הנוכחי. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
תוכנת סימולציית הנהיגה ועקרת הכלים הרוטטת בשיטה המוצעת כבר שימשו במחקרים קודמים על ידי החוקרים שלנו22,23,24,25,26,27,28,29. ערכת כלים רוטטת שפותחה על ידי עצמה בהתאם לתקן ISO30 ניתנת להחלה בשדות שונים31,32 על ידי התאמת תדירות הרטט ועוצמתו. חשוב לציין כי פותחה גירסה חדשה יותר של ערכת הכלים הרוטטת והיא מוצגת בפרוטוקול הבא. במקום להתאים את תדר הרטט באמצעות מתאם מתח מתכוונן, הגרסה החדשה מצוידת בחמישה תדרי רטט שונים וניתן להתאים אותה בקלות רבה יותר באמצעות הקודים המסופקים בקובץ קידוד משלים 1. יתר על כן, סימולטור הנהיגה המוצג מספק לחוקרים דרך בטוחה, זולה ויעילה לחקור סוגים שונים של מחקר הקשור לנהיגה. לפיכך, פרוטוקול זה מתאים למעבדות מחקר שיש להן תקציב מוגבל ויש להן צורך חזק להתאים אישית סביבות נהיגה ניסיוניות.
Protocol
הערה: כל השיטות המתוארות כאן אושרו על ידי ועדת הביקורת המוסדית (IRB) של אוניברסיטת צינגהואה והסכמה מדעת התקבלה מכל המשתתפים.
1. משתתפים
- בצע ניתוח כוח כדי לחשב את מספר המשתתפים הנדרש לגיוס על פי התכנון הניסיוני כדי להשיג כוח סטטיסטי.
- לאזן את מין המשתתפים במהלך הגיוס ככל האפשר.
- ודא שלמשתתפים יש רישיון נהיגה תקף ולפחות שנה אחת של ניסיון בנהיגה.
- ודא שלמשתתפים יש ראייה רגילה או מתוקנת לראייה רגילה באמצעות תרשים הראייה.
- ודא כי המשתתפים לא צורכים אלכוהול או סמים המשפיעים על יכולות הנהיגה בתוך 24 שעות לפני הניסוי33.
2. קביעת תצורה של תוכנת הדמיית נהיגה
- הזן את התיקיה של תוכנת הדמיית הנהיגה ואחריה התיקיה זמן ריצה והתיקיה Config. לאחר מכן, פתח את הקובץ "expconfig.txt" (כלומר, נתיב הקובץ צריך להיות "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\").
- קבע אם להחיל תצורה כלשהי או להמשיך בסימולציית הנהיגה באמצעות הגדרות ברירת המחדל ללא כל תצורה טרייה מהקופסה על-ידי התייחסות לעיצוב הניסיוני. טבלה 1 מציגה תיאור מפורט של תצורות ברירת המחדל של כל האפשרויות הזמינות.
- המשך לסעיף 3 של הפרוטוקול אם אין לבצע שינויים.
| אפשרויות הניתנות להגדרה | תיאור | הגדרות ברירת מחדל |
| סוף זמן המתנה | האם להשתמש בזמן השעון כגורם מפעיל לסיום הניסוי. | False |
| סיוםלא תבוא-מינון | סיים את הניסוי אחרי הדקות האלה. | 10 |
| סוףאקספדיסט | האם להשתמש במכוניתו של הנהג נסע מרחק כגורם מפעיל לסיום הניסוי. כאשר נעשה שימוש הן בגורמים מפעילים של זמן והן במרחק, סיים את הניסוי עם זה שמתרחש תחילה. | False |
| סוףמטה | סיים את הניסוי לאחר מטרים אלה כבר נסעו מקו ההתחלה. | 5000 |
| הפוך את הרוח הקדמית לזמינה | האם לאפשר רוח קדמית(כלומר כוח שדוחף את המכונית לכיוון האחורי) עם מרווח ומשך אקראיים. | נכון |
| פרונטליWindמינה | ערך מינימלי (שניות) של מרווח הרוח הקדמי. | 3 |
| פרונטליווינד-נטרוולמקס | הערך המרבי (שניות) של מרווח הרוח הקדמי. | 13 |
| פרונטליWindהתקדם | ערך מינימלי (שניות) של משך הרוח הקדמית. | 2 |
| כיוון הרוח הקדמימקסימום | ערך מרבי (שניות) של משך הרוח הקדמית. | 3 |
| כוח נגדיWindMin | ערך מינימלי (ניוטון) של כוח הרוח הקדמי. | 500 |
| פרונטליווינד פורסמקס | ערך מרבי (ניוטון) של כוח הרוח הקדמי. | 1000 |
| הפוך את הרוח של רנדוםלטרל לזמינה | האם לאפשר רוח לרוחב (כלומר כוח דוחף את המכונית לכיוון שמאל או ימין) עם מרווח ומשך אקראיים. | נכון |
| לרוחבWindמינה | ערך מינימלי (שניות) של מרווח הרוח לרוחב. | 3 |
| לרוחבווינד-נטרמקס | ערך מרבי (שניות) של מרווח הרוח לרוחב. | 8 |
| מיין רגיעה לרוחב | ערך מינימלי (שניות) של משך הרוח לרוחב. | 2 |
| כיוון הרוח לרוחבמקסימום | הערך המרבי (שניות) של משך הרוח לרוחב. | 3 |
| לרוחבWindForceMin | ערך מינימלי (ניוטון) של כוח הרוח לרוחב. | 1000 |
| לרוחבווינדפורסמקס | ערך מרבי (ניוטון) של כוח הרוח לרוחב. | 2000 |
| עופרתקארקונסטנטספידמ/שעה | מהירות קבועה של הרכב המוביל (קמ"ש). | 40 |
| הפניההתחלת נישואין | הרכב המוביל יתחיל להמתין לרכב הנהג כאשר המרחק (מטרים) בין זנב הרכב המוביל לראשו של הנהג גדול מהמספר המצוין. | 100 |
| מוביליםטסטופוויטינג | המכונית המובילה תחכה עד שהמרחק (מטרים) לפני מכונית הנהג יהיה קטן ממספר זה. | 80 |
| עופרתקארברק-נטר-זמןמין | מרווח זמן אקראי מינימלי (שניות) עבור הרכב המוביל לבלום. | 30 |
| עופרתברק-ים-זמןמקס | מרווח זמן אקראי מרבי (שניות) עבור הרכב המוביל לבלום. | 60 |
| עופרתקארברייקהתכון | משך האירוע (שניות) של בלם הרכב המוביל. | 5 |
| הפוך לזמיןהפעלת רנסוםMSSound | האם לאפשר השמעת צליל הודעה קצר בשרת הודעות עם מרווחי זמן אקראיים. | False |
| ראנדSMSשני | מרווח זמן אקראי מינימלי (שניות) מתחילת הודעת ה- SMS הראשונה ועד לתחילת הודעת ה- SMS השניה. | 2 |
| ראנדSMSהתאמת-ערךמקס | מרווח זמן אקראי מרבי (שניות) מתחילת הודעת ה- SMS הראשונה ועד לתחילת הודעת ה- SMS השניה. | 2 |
| הפוך את 'הפעלההפעלהשבת אופן' | האם להפעיל צליל מספר N-back שהושמע עם מרווחי זמן אקראיים. | False |
| ראנדנבקמיני | מרווח זמן אקראי מינימלי (שניות) מתחילת הצליל הראשון ועד תחילת הצליל השני. | 2.33 |
| ראנדנבקIntervalMax | מרווח זמן אקראי מרבי (שניות) מתחילת הצליל הראשון ועד תחילת הצליל השני. | 2.33 |
| הפוך את ה-UDPSenddata לזמין | האם לאפשר סינכרון נתונים של חותמת זמן ל- IP ספציפי של רשת מקומית. | False |
| הפוך את ה-UDPSenddataAdstudy לזמין | האם לאפשר שליחת נתונים לכתובת ה-IP הבאה לצורך מחקר הפרסומות. הערה: התנגשות עם ה-UDPSendData לזמין. | False |
| UDPטרגטיפה1 | כתובת IP עבור העברת UDP | / |
| UDPמטרגטיPa2 | ||
| UDPמטרגטיPa3 | ||
| UDPמטרגטיPa4 | ||
| יציאת UDPTarget | יציאת UDP המשמשת כיעד. | 1234 |
| מספר UDPcycleנאמבר | קבע באיזו תדירות נשלח חותמת הזמן. הנתונים יישלחו לאחר כל UDPcycleNumber של מחזורי TORCS עם כל מחזור הוא בדרך כלל 20 אלפיות השנייה. | 1 |
| הפוך חיבורUDPQN לזמין | האם להפעיל הדמיית כונן דגם QN-Java עם שרת ה- UDP והלקוח הם אותו מחשב. | False |
| יציאת UDPQNtoTORCS | יציאת UDP QN למספר יציאת ההדמיה. | 5678 |
| נמל UDPTORCtoQN | יציאת ההדמיה למספר יציאת UDP QN. | 8765 |
| עופרתקארבריקינגביובקומנד | האם להתחבר לאתר אינטרנט עבור אות הבלימה של הרכב המוביל. | False |
| Far_Point_Time_Ahead | הפרמטר המשמש בדגם בקרת הרכב. | 2 |
| הפעל את 'טרא-טרא-טראינג' שלCarFollowing | האם להפעיל את המשימה המדומה של מעקב אחר מכוניות במצב אימון. | / |
| קארפולווינגטרינינגוורנינגאינטרבל | מרווח זמן מתחילת צליל האזהרה האחרונה להשמעת צליל האזהרה הבאה של מצב האימון. | 2 |
טבלה 1: רשימת הגדרות ברירת המחדל עבור תוכנת הדמיית הנהיגה. רשימה של ערכי ברירת המחדל של כל האפשרויות המשויכות להגדרה של תוכנת הדמיית הנהיגה יחד עם תיאור מפורט של כל אפשרות.
- קבע את תצורת ההגדרות כיצד לסיים את הניסוי בהתבסס על משתנה הבקרה של התכנון הניסיוני.
- החלט אם להשתמש בזמן השעון כגורם מפעיל כדי לסיים את הניסוי עם האפשרות "endExpByTime =" באמצעות True או False כבחירה של אפשרויות. הגדר אפשרות זו כ- False כדי לשכפל את המחקר המופתי.
- בחר אם לסיים את הניסוי עם זמן שנסע כגורם מפעיל עם האפשרות "endExpAfterMinute =" על-ידי הזנת מספר הדקות בתבנית במקום עשרוני אחד. הזמן שנסע יכול להיות מוכרע לחלוטין על ידי החוקרים. קלט 12 כדי לשכפל את המחקר למופת.
- הגדר אם לסיים את הניסוי עם מרחק נסע כגורם מפעיל עם האפשרות "endExpByDist =" באמצעות אמת או שקר כבחירה של אפשרויות. שים לב שכאשר האפשרויות "endExpByTime=" ו- "endExpByDist=" מוגדרות כ- True, הניסוי יסתיים בתנאי שמתקיים תחילה. הגדר אפשרות זו כ- True כדי לשכפל את המחקר המופתי.
- השתמש באפשרות "endExpAfterMeter =" כדי להגדיר את המרחק שנסע מקו ההתחלה במטרים בתבנית עם מקום עשרוני אחד. המרחק שנסע יכול להיות מוכרע לחלוטין על ידי החוקרים. קלט 10000.0 כדי לשכפל את המחקר למופת.
- קבעו את הגדרות הרוח לסביבת הנהיגה המדומה בהתאם למהירות הרוח34,35 המיועדת לסביבה הווירטואלית ולעומס הקוגניטיבי36 שיופעל בניסוי.
- הגדר אם לאפשר רוח חזיתית עם מרווח ומשך זמן אקראיים עם האפשרות "enableRandomFrontalWind =" באמצעות True או False כבחירה באפשרויות. הגדר אפשרות זו כ- True כדי לשכפל את המחקר המופתי.
- הגדר את מרווח הרוח הקדמי המינימלי והמקסימלי עם האפשרויות "FrontalWindIntervalMin =" ו- "frontalWindIntervalMax =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 3.0 ו- 13.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את משך הרוח הקדמי המינימלי והמקסימלי עם האפשרויות "frontalWindDurationMin =" ו- "frontalWindDurationMax =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 2.0 ו- 3.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את עוצמת הרוח הקדמית המינימלית והמקסימלית עם האפשרויות "FrontalWindForceMin =" ו- "frontalWindForceMax =" על-ידי ציון כמות הכוח בניוטון, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 500.0 ו- 1,000.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- בחר אם לאפשר רוח לרוחב עם מרווח ומשך זמן אקראיים עם האפשרות "enableRandomLateralWind =" באמצעות True או False כבחירת האפשרויות. הגדר כ- True כדי לשכפל את המחקר המופתי.
- הגדר את מרווח הרוח לרוחב המינימלי והמקסימלי עם האפשרויות "לרוחבWindIntervalMin =" ו- "לרוחבWindIntervalMax =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 3.0 ו- 8.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את משך הרוח לרוחב המינימלי והמקסימלי עם האפשרויות "לרוחבWindDurationMin =" ו- "lateralWindDurationMax =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 2.0 ו- 3.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את עוצמת הרוח לרוחב המינימלית והמקסימלית עם האפשרויות "לרוחבWindForceMin =" ו- "לרוחבWindForceMax =" על-ידי ציון כמות הכוח בניוטון, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 1,000.0 ו- 2,000.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- קבע את תצורת ההגדרות עבור המשימה המדומה של מעקב אחר מכוניות בהתאם לתכנון הניסיוני וזקוקל- 35.
- הגדר את המהירות הקבועה של הרכב המוביל בקילומטרים לשעה עם מקום עשרוני אחד באמצעות האפשרות "leadCarConstantSpeedMPH =". קלט 40 כדי לשכפל את המחקר למופת.
- הגדר את המרחק במטרים עם מקום עשרוני אחד בין הרכב המוביל לרכב הנהג כדי להפעיל את הרכב המוביל כדי להתחיל לחכות לרכב הנהג כדי להדביק את הפער, או כדי לחדש את הנהיגה, עם "leadDistToStartWaiting =" ו " leadDistToStopWaiting =" אפשרויות, בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 100.0 ו- 80.0, בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את מרווח הזמן האקראי המרבי והמינימלי של אירועי בלם הרכב המוביל עם האפשרויות "leadCarBrakeIntervalTimeMin =" ו- "leadCarBrakeIntervalTimeMax =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד (לדוגמה, 30.0 ו- 60.0), בהתאמה. השתמש בהגדרת ברירת המחדל (כלומר, 30.0 ו- 60.0 בהתאמה) כדי לשכפל את המחקר המופתי.
- הגדר את משך אירוע הבלמים באמצעות האפשרות "leadCarBrakeEventDuration =" על-ידי הזנת מספר השניות בתבנית במקום עשרוני אחד. השתמש בהגדרת ברירת המחדל (כלומר, 5.0) כדי לשכפל את המחקר המופתי.
- קבע את תצורת ההגדרות עבור צליל הודעות קצרות אקראיות בהתאם לתכנון ולצרכים הניסיוניים.
- החלט אם להפעיל צלילי הודעה של שירות הודעות קצרות (SMS) לשחק עם מרווחי זמן אקראיים עם True או False כבחירה של אפשרויות עבור האפשרות "enableRandomSMSSound =". הגדר את האפשרות כ- False כדי לשכפל את המחקר המופתי.
- הגדר את מרווח הזמן המינימלי והמקסימלי מתחילת הודעת ה- SMS הראשונה לתחילת הודעת ה- SMS השניה באמצעות האפשרויות "randSMSIntervalMin =" ו- "randSMSIntervalMax =", על-ידי ציון מספר השניות בתבנית עם מקום עשרוני אחד (לדוגמה, 5.0 ו- 10.0) בהתאמה.
- קבע את תצורת ההגדרות עבור משימת N-back המדומה37 בהתאם לתכנון ולצרכים הניסיוניים.
- הגדר צלילי מספר N-back להפעלה עם מרווחי זמן אקראיים עם True או False כבחירה באפשרויות עבור האפשרות "enableRandomNbackSound =". הגדר את האפשרות כ- False כדי לשכפל את המחקר המופתי.
- הגדר את מרווח הזמן המינימלי והמקסימלי מהיסט הצליל הראשון לתחילת הצליל השני באמצעות האפשרויות "randNbackIntervalMin =" ו- "randNbackIntervalMax =" כדי לציין את מספר השניות בתבנית עם מקום עשרוני אחד (לדוגמה, 5.0 ו- 10.0), בהתאמה.
- קבע את התצורה של הגדרות פרוטוקול יחידת נתונים של משתמש (UDP) אם נדרשת העברת נתונים של UDP עבור הניסוי.
- החלט אם להפוך את ה- UDP לזמין להעברת נתונים על-ידי מתן אפשרות לסינכרון נתוני חותמת זמן לכתובת IP ספציפית של רשת מקומית באמצעות האפשרות "הפעל אתUDPSendData =" באמצעות True או False כבחירת האפשרויות. הפוך אפשרות זו לזמינה כדי לשכפל את המחקר המופתי.
- בחר אם להפוך את ה- UDP לזמין להעברת נתונים לכתובת IP ספציפית עבור מחקר פרסומי באמצעות האפשרות "enableUDPSendDataAdStudy =" באמצעות True או False כבחירת האפשרויות. כמו כן, יש להזכיר כי אפשרות זו מתנגשת עם "enableUDPSendData =" ולא ניתן להגדיר את שתי האפשרויות כ- True בו-זמנית. הגדר את האפשרות כ- False כדי לשכפל את המחקר המופתי.
- הגדר את כתובת ה- IP עבור העברת UDP על-ידי ציון כל מקטע בכתובת ה- IP באמצעות "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" ו- "UDPTargetIPa4 =".
- ציין את מספר יציאת היעד תחת "UDPTargetPort =".
- הגדר את התדירות לשליחת הנתונים תחת "UDPcycleNumber =" עם כל מספר שלם הגדול או שווה למחזור "1" שבו, כל מחזור הוא 20 אלפיות השנייה.
- קבע את התצורה של חיבור רשת תורי UDP (QN) דגם38 תוך התייחסות לעיצוב ולצרכים הניסיוניים.
- הגדר אם להפעיל את הדמיית כונן דגם QN-Java שבה שרת ה- UDP והלקוח משתפים את אותו מחשב, עם האפשרות "enableUDPQNConnection =" באמצעות True או False כבחירת האפשרויות. הפוך אפשרות זו ללא זמינה כדי לשכפל את המחקר המופתי.
- ציין את המספר מיציאת UDP QN ליציאת ההדמיה תחת האפשרות "UDPQNtoTORCSPort =".
- ציין את המספר מיציאת ההדמיה ליציאת UDP QN תחת האפשרות "UDPTORCStoQNPort =".
- קבעו אם להתחבר לאתר אינטרנט לבלימה של אותות בהתאם לעיצוב הניסיוני תחת האפשרות "leadCarBrakingByWebCommand =" באמצעות True או False כבחירה באפשרויות. שים לב שכאשר אפשרות זו מוגדרת כ- True, "endExpByTime =" ו- "endExpAfterMinute =" יפסיקו לפעול. הגדר את האפשרות כ- False כדי לשכפל את המחקר המופתי.
- הגדר אם להפעיל את המשימה המדומה של מעקב אחר מכוניות במצב אימון עם "enableCarFollowingTraining =" באמצעות True או False כבחירה של אפשרויות.
- הגדר את מרווח הזמן מתחילת צליל האזהרה האחרונה לתחילת צליל האזהרה הבאה של האימון באמצעות האפשרות "carFollowingTrainingWarningInterval =" על-ידי ציון מספר השניות עם מקום עשרוני אחד (לדוגמה, 2.0).
- שמור את הקובץ עם השלמת קביעת התצורה.
3. הכנת סימולטור נהיגה
- חבר למחשב את ההגה ואת המקרן המרכזי (מקרן נטען עם יחס גובה-רוחב של 16:10, 192 - 240 הרץ ועיבוד צבע של 8 סיביות). מסך מקרן עם מימד של 223x126 ס"מ הוצב 60 ס"מ מעל הקרקע ו 22 ס"מ מחזית הרכב המכשיר.
- הגדרת רזולוציית המסך תחת אפשרויות | תצוגה, כדי להתאים לגודל המסך בעת הפעלת תוכנת הדמיית הנהיגה.
- הזן את הדף קביעת תצורה כדי לבחור שחקן ובצע את ההוראות שסופקו על-ידי התוכנה כדי לכייל את ההגה, המאיץ ואת דוושת הבלם. אלה כוללים סיבוב ההגה ולחיצה על דוושת התאוצה והבלם לפי ההנחיות.
4. תצורה והכנה של ערכת כלים רוטטת
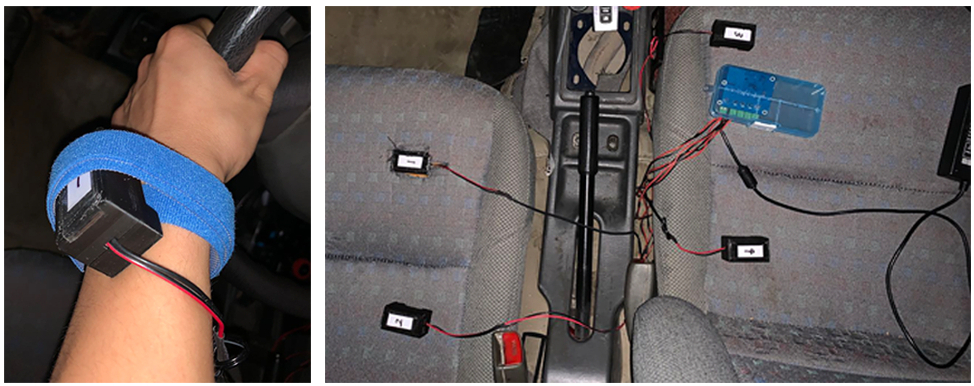
- חבר את ערכת הכלים הרוטטת לאספקת החשמל. לכל אחד מארבעת המודולים יש ממד של 67 x 57 x 29 מ"מ. איור 2 מציג תמונה של ערכת הכלים הרוטטת.

איור 2: תמונות של ערכת הכלים הרוטטת. ערכת הכלים הרוטטת כללה ארבעה מודולים נפרדים שניתן להפעילם בנפרד. לכל מודול ממד של 67 x 57 x 29 מ"מ. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
- הפעל את ערכת הכלים הרוטטת וחבר את ערכת הכלים למחשב באמצעות Bluetooth.
- הגדר את תדר הרטט שישמש לניסוי עם השלמת בדיקת רגישות העור של הטייס או בהתאם לצרכים הניסיוניים.
- הגדר את תדירות הרטט ל- 70 הרץ39,40,41 באמצעות הקודים המסופקים כקובץ קידוד משלים 1. בסך הכל חמש רמות תדר (כלומר, 14Hz, 28Hz, 42Hz, 56Hz ו- 70Hz) זמינות כעת עם כל גירוי רטט שנמשך 0.5 שניות כברירת מחדל.
- השתמש בקודים המסופקים כקובץ קידוד משלים 1 כדי לסנכרן את אירועי הבלמים מתוכנת הדמיית הנהיגה וכרגז הכלים הרוטט. איור 3 מציג צילום מסך עם תווית של הקודים שיש לתקן כהפניה.

איור 3: צילום מסך עם תווית של הקודים בקובץ קידוד משלים 1. צילום המסך המסומן בתווית של קודים יכול לשמש כנקודת התייחסות קלה יותר לתצורה ולהכנה של ערכת הכלים הרוטטת. קודים אלה משמשים להגדרת תדירות הרטט של ערכת הכלים, ולסנכרן את אירועי הבלמים בתוכנת הדמיית הנהיגה וכרגז הכלים הרוטט כדי ליצור אזהרות רוטטות. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
5. ביצוע הניסוי
- הורה למשתתפים לקרוא ולחתום על טופס ההסכמה מדעת המציג את תהליך הניסוי ולהצהיר כי המחקר הוא להעריך את ביצועי הנהיגה עם ההגעה למעבדה.
- סייע למשתתפים להתאים את מרחק המושב לדוושה ולהגדיר את משענת הגב למיקום נוח באופן ידני.
- למדו את המשתתפים כיצד להפעיל את הסימולטור, כולל ההגה, דוושת הבלם דוושת התאוצה.
- הורה למשתתפים לנהוג כפי שהיו נוהגים בעולם האמיתי, לעקוב אחר המכונית שלפניהם ולשמור על התקדמות של שתי שניות מאחוריה. איור 4 מציג את מפת הדרכים המשמשת להדמיית הנהיגה.

איור 4: מפת דרכים המשמשת להדמיית נהיגה. הכביש בו נעשה שימוש הוא כביש חד-סטרי עם ארבע עקומות (אורך מרבי של 15,000 מטרים), שלושה נתיבים וללא רמזורים. תוכנת סימולטור הנהיגה מציעה אפשרויות עיצוב כביש אחרות כגון אפשרויות לכלול תמרורים או שלטי חוצות. גירסה תואמת EEG זמינה אף היא. ניתן להתאים את כל הפרמטרים הללו במידת הצורך. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
- יש ליידע את המשתתפים על הבלמים בהקדם האפשרי בכל פעם שהרכב הקדמי יבלום, גם אם התרחיש אינו דורש תגובת בלם. הפנסים האחוריים של הרכב הקדמי יודלקו בהתאם לנהיגה בעולם האמיתי כדי לציין אירוע בלם.
- ספק למשתתפים ניסיון תרגול של 5 דקות כדי ללמוד לשמור על מרחק של שתי שניות מאחורי הרכב הקדמי. ניסוי התרגול כולל סט של 5 בלמים אקראיים.
- במהלך משפט התרגול, אם המשתתפים נמצאים פחות מ 1.5 s מאחורי הרכב הקדמי, תוכנת סימולציית הנהיגה תנגן בקשה עם קול נשי "קרוב מדי, בבקשה להאט".
- אם המשתתפים נמצאים בין 2.25 ל 2.5 s מאחורי הרכב הקדמי, תוכנת סימולציית הנהיגה תנגן בקשה עם קול נשי "רחוק מדי, נא להאיץ".
- אל תכלול נתונים מניסוי התרגול עבור הניתוח.
- תן למשתתפים לדעת כי המחקר יכול להיפסק ללא כל עונש על ידי הודעה לנסיינים בכל עת, במידת הצורך.
- התחל את הניסוי הרשמי לאחר שהמשתתפים סיימו את התרגול ויכולים לשמור על מרחק יציב לאחר מכן.
- התחל את הפגישה הניסיונית הרשמית, המורכבת בסך הכל מארבעה בלוקים (כלומר, אצבע, פרק כף יד, מקדש ונהיגה בלבד) עם 13 אירועי בלימה אקראיים בכל בלוק, וכתוצאה מכך בסך הכל 52 ניסויים ניסיוניים. סדר התנאים מאוזן עם העיצוב הריבוע הלטיני. לא ניתנת הנחיה קולית במשפטים הרשמיים.
- לסייע למשתתפים לשים על ערכת הכלים רוטט באמצעות קלטת רפואית לפני כל בלוק של ניסויים על פי התנאים שהוקצו. ערכת הכלים הרוטטת (אם שחוקה) מזהירה את המשתתפים לבלום כאשר הרכב הקדמי בלימה. הפנסים האחוריים של הרכב הקדמי מוארים בכל פעם שהרכב הקדמי בלם.
- ודא כי המשתתפים מקבלים מנוחה של 2 דקות עם השלמת כל בלוק כדי להפחית את השפעות carryover.
- בקש מהמשתתפים את המיקום המועדף עליהם עבור ערכת הכלים הרוטטת ואת עוצמת הרטט הנתפסת בסולם Likert של 7 נקודות עם השלמת כל הניסויים. שיעור השימוש של כל אביזר לביש יומי (כלומר, שעון, משקפיים, אוזניות וטבעת) נרשם גם הוא. בסולם ההעדפות למיקום ערכת הכלים הרוטטת, "1" מייצג את "הכי פחות מועדף" ו-"7" מייצג את "המועדף ביותר", ואילו בסולם עוצמת הרטט "1" מייצג "תחושה חלשה" ו-"7" מייצג "תחושה חזקה".
6. ניתוח נתונים
- לאסוף את נתוני התנהגות הנהיגה של המשתתפים ב 50 הרץ באמצעות תוכנת הדמיית הנהיגה, כולל זמן תגובת הבלם, מהירות הרכב, קצב היפוך ההגה, מיקום הנתיב (SDLP), ומרחק הכביש, וכו '.
- בצע ניתוח נתונים של ביצועי מנהלי ההתקנים.
- בצע ניתוח חריג באמצעות ההתפלגות הנורמלית עם ניתוק כשלוש סטיות תקן מהכוונה כדי לקבוע אילו נתונים לכלול לניתוח נוסף.
- לחשב את זמן תגובת הבלם על ידי קיצור הזמן שבו בלמי הרכב המשתתפים (כלומר, הפחתה מינימלית של 1% מדוושת הבלם36,42) מרגע שהרכב הקדמי מתחיל לבלום.
- תייג את הנתונים כ"ללא תגובת בלם" אם זמן תגובת הבלמים גדול או שווה ל- 5 שניות (כלומר, כשל בבלם תוך 5 שניות לאחר בלמי הרכב הקדמי).
- חלק את מספר הבלמים המוצלחים במספר הבלמים הכולל המבוצע על ידי הרכב הקדמי כדי לחשב את קצב תגובת הבלמים.
- ממוצע כל הערכים של כל משתתף כדי לקבל את קצב תגובת הבלמים הממוצע וזמן תגובת הבלמים של כל תנאי ולחשוב את סטיית התקן על ערכים אלה לניתוחים נוספים.
תוצאות
המחקר המופתי שדווח במאמר זה ערך את המשימה הבאה ברכב באמצעות סימולטור הנהיגה וערכת הכלים רוטטת, אשר פורסם גם בעבר בכתב עת אקדמי22. ראוי לציין כי הגרסה הישנה יותר של ערכת הכלים רוטט שימש בעת ביצוע המחקר למופת, בעוד גרסה חדשה של ערכת הכלים רוטט הוצג בפרוטוקול לעיל. המחקר היה ניסוי ?...
Discussion
פלטפורמת סימולציית הנהיגה ועקרת הכלים הרוטטת חיקו באופן סביר את היישום של מכשירים vibrotactile לביש פוטנציאליים בחיים האמיתיים, מתן טכניקה יעילה בחקירת מחקר הקשור לנהיגה. עם השימוש בטכנולוגיה זו, סביבה ניסיונית בטוחה עם יכולת קביעת תצורה גבוהה ומחירים סבירים זמינה כעת לביצוע מחקר הדומה לנהיג?...
Disclosures
המחברים לא הצהירו על גילוי פיננסי או ניגודי עניינים.
Acknowledgements
פרויקט זה מומן על ידי קרן בייג'ינג טאלנטים.
Materials
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
References
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved