
Zum Anzeigen dieser Inhalte ist ein JoVE-Abonnement erforderlich. Melden Sie sich an oder starten Sie Ihre kostenlose Testversion.
Method Article
Tactile Vibrating Toolkit und Driving Simulation Platform für fahrbezogene Forschung
In diesem Artikel
Erratum Notice
Zusammenfassung
Dieses Protokoll beschreibt eine Fahrsimulationsplattform und ein taktiles Vibrieren-Toolkit für die Untersuchung der fahrbezogenen Forschung. Ein Beispielexperiment zur Erforschung der Wirksamkeit taktiler Warnhinweise wird ebenfalls vorgestellt.
Zusammenfassung
Kollisionswarnsystem spielt eine Schlüsselrolle bei der Vermeidung von Ablenkungen und schläfrigem Fahren. Frühere Studien haben die Vorteile taktiler Warnhinweise bei der Reduzierung der Reaktionszeit des Fahrers bei der Bremsreaktion nachgewiesen. Gleichzeitig haben sich taktile Warnhinweise bei Übernahmeanträgen (TOR) für teilautonome Fahrzeuge als wirksam erwiesen.
Wie die Leistung taktiler Warnungen optimiert werden kann, ist ein aktuelles heißes Forschungsthema in diesem Bereich. So werden die vorgestellte kostengünstige Fahrsimulationssoftware und -methoden eingeführt, um mehr Forscher für die Teilnahme an der Untersuchung zu gewinnen. Das vorgestellte Protokoll ist in fünf Abschnitte unterteilt: 1) Teilnehmer, 2) Fahrsimulations-Software-Konfiguration, 3) Vorbereitung des Fahrsimulators, 4) vibrierende Toolkit-Konfiguration und -Vorbereitung und 5) Durchführung des Experiments.
In der Exemplar-Studie trugen die Teilnehmer das taktile Vibrierende Toolkit und führten eine etablierte Auto-Folgeaufgabe mit der kundenspezifischen Fahrsimulationssoftware durch. Das vordere Fahrzeug bremste zeitweise, und bei jeder Bremsung des vorderen Fahrzeugs wurden vibrationsbeschimpfungswarnungen angeliefert. Die Teilnehmer wurden angewiesen, so schnell wie möglich auf die plötzlichen Bremsen des vorderen Fahrzeugs zu reagieren. Die Fahrdynamik, wie die Bremsansprechzeit und die Bremsansprechrate, wurde von der Simulationssoftware zur Datenanalyse aufgezeichnet.
Das vorgestellte Protokoll bietet Einblicke in die Erforschung der Wirksamkeit taktiler Warnhinweise an verschiedenen Körperstandorten. Zusätzlich zu der Imobistenaufgabe, die im Beispielexperiment gezeigt wird, bietet dieses Protokoll auch Optionen, um andere Paradigmen auf die Fahrsimulationsstudien anzuwenden, indem eine einfache Softwarekonfiguration ohne Codeentwicklung erstellt wird. Es ist jedoch wichtig zu beachten, dass aufgrund seines erschwinglichen Preises die hier eingeführte Fahrsimulationssoftware und -hardware möglicherweise nicht in der Lage ist, mit anderen hochwertigen kommerziellen Fahrsimulatoren vollständig zu konkurrieren. Dennoch kann dieses Protokoll als erschwingliche und benutzerfreundliche Alternative zu den allgemeinen High-Fidelity-Werbesimulatoren fungieren.
Einleitung
Nach den Daten, die von den Global Health Estimates im Jahr 2016 enthüllt wurden, ist Verkehrsschäden die achte Ursache für weltweite Todesfälle, die zu 1,4 Millionen Todesfällen weltweit1führen. Im Jahr 2018 waren 39,2 % der Verkehrsunfälle Kollisionen mit Kraftfahrzeugen im Verkehr, 7,2 % davon Auffahrunfälle. Eine Lösung zur Erhöhung der Fahrzeug- und Straßenverkehrssicherheit ist die Entwicklung eines fortschrittlichen Fahrassistenzsystems (ADAS), um Fahrer vor potenziellen Gefahren zu warnen. Die Daten haben gezeigt, dass ADAS die Rate von Auffahrunfällen erheblich reduzieren kann, und es ist noch effektiver, wenn es mit einem Auto-Bremssystem ausgestattet ist2. Darüber hinaus wird bei der Entwicklung autonomer Fahrzeuge weniger menschliche samtische Sendekraft erforderlich sein, um das Fahrzeug zu steuern, was ein Warnsystem für die Übernahme (TOR) zu einer Notwendigkeit macht, wenn das autonome Fahrzeug sich nicht selbst reguliert. Das Design des ADAS- und TOR-Warnsystems ist nun eine wichtige Technologie für Autofahrer, um drohende Unfälle innerhalb weniger Sekunden zu vermeiden. Das exemplarische Experiment verwendete ein vibrierendes Toolkit zusammen mit einer Fahrsimulationsplattform, um zu untersuchen, welcher Standort das beste Ergebnis erzielen würde, wenn ein vibrotactile Warnsystem als potenzielles ADAS- und TOR-Warnsystem verwendet wurde.
Kategorisiert durch Wahrnehmungskanäle, gibt es in der Regel drei Arten von Warnmodalitäten, d. h. visuelle, auditive und taktile. Jede Warnmodalität hat ihre eigenen Vorzüge und Grenzen. Wenn visuelle Warnsysteme im Einsatz sind, können Fahrer unter visueller Überlastung leiden3, Beeinträchtigung der Fahrleistungen aufgrund von unaufmerksamer Blindheit4,5. Obwohl ein auditives Warnsystem das Sichtfeld der Fahrer nicht beeinflusst, hängt seine Wirksamkeit stark von der Umgebung ab, wie Hintergrundmusik und andere Geräusche in der Fahrumgebung6,7. Daher können Situationen, die andere externe Auditinformationen oder erhebliche Geräusche enthalten, zu unaufmerksamer Taubheit8,9führen, wodurch die Wirksamkeit eines auditiven Warnsystems verringert wird. Im Vergleich dazu stehen taktile Warnsysteme nicht im Wettbewerb mit der visuellen oder auditiven Verarbeitung der Fahrer. Durch das Senden von vibrotactile Warnungen an Fahrer überwinden taktile Warnsysteme die Grenzen von visuellen und auditiven Warnsystemen.
Frühere Studien zeigten, dass taktile Warnhinweise den Fahrern zugute kommen können, indem sie ihre Bremsreaktionszeit verkürzen. Es wurde auch festgestellt, dass taktile Warnsysteme in bestimmten Situationen ein effektiveres Ergebnis gegenüber visuellen10,11 und auditiven12,13,14 Warnsystemen liefern. Die begrenzte Forschung konzentrierte sich jedoch auf die Untersuchung des optimalen Standorts für die Platzierung eines taktilen Warngeräts. Nach der sensorischen Kortexhypothese15 und der sensorischen Entfernungshypothese16wählte die Exemplarstudie die Finger-, Handgelenk- und Tempelbereiche als Versuchsorte für die Platzierung eines taktilen Warngeräts. Mit dem eingeführten Protokoll können die Häufigkeit und Lieferzeit einer vibrierenden Warnung sowie Intervalle zwischen Vibrationen des vibrierenden Toolkits so konfiguriert werden, dass sie den experimentellen Anforderungen entsprechen. Dieses vibrierende Toolkit bestand aus einem Master-Chip, einem Spannungsreglerchip, einem Multiplexer, einem USB-zu-Transistor-Logic (TTL)-Adapter, einem Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) und einem Bluetooth-Modul. Die Anzahl der vibrierenden Module kann auch je nach den Bedürfnissen der Forscher variieren, wobei bis zu vier Module gleichzeitig vibrieren. Bei der Implementierung des vibrierenden Toolkits in den fahrbezogenen Experimenten kann es so konfiguriert werden, dass es an die experimentellen Einstellungen anpasst und durch Die Überarbeitung der Codes der Fahrsimulation mit Fahrleistungsdaten synchronisiert wird.
Während für Forscher, Durchführung eines Fahrexperiments auf einer virtuellen Plattform ist mehr möglich als in der realen Welt aufgrund der Risiken und Kosten beteiligt. Beispielsweise kann das Sammeln von Leistungsindikatoren schwierig sein, und es ist schwierig, die Umweltfaktoren zu kontrollieren, die bei Derversuchen in der realen Welt erforderlich sind. Infolgedessen haben viele Studien in den letzten Jahren Festnetz-Fahrsimulatoren auf PCs als Alternative zur Durchführung von Fahrstudien auf der Straße verwendet. Nachdem wir über 11 Jahre lang in der Fahrforschungsgemeinschaft gelernt, entwickelt und recherchiert haben, haben wir eine Fahrsimulationsplattform mit einem echten Auto aufgebaut, die aus einer Open-Source-Fahrsimulationssoftware und einem Hardware-Kit besteht, einschließlich Lenkrad und Getriebe, drei Pedalen, drei montierten Projektoren und drei Projektorbildschirmen. Da die Fahrsimulationssoftware nur einen einzigen Bildschirm unterstützt, verwendet das vorgestellte Protokoll nur den zentralen Projektor und Projektorbildschirm, um das Experiment durchzuführen.
Die Nutzung der vorgestellten Fahrsimulationsplattform bietet zwei große Vorteile. Ein Vorteil dieser Plattform ist, dass sie eine Open-Source-Software verwendet. Mithilfe der benutzerfreundlichen Open-Source-Plattform können Forscher das Simulations- und Vibrations-Toolkit für ihre individuellen Forschungsanforderungen anpassen, indem sie eine einfache Softwarekonfiguration ohne Codeentwicklung vornehmen. Durch die Überarbeitung der Codes können Forscher Fahrsimulationen erstellen, die eine relative Realitätstreue bieten, mit vielen Optionen für Fahrzeugtypen, Straßentypen, Widerstand des Lenkrads, seitliche und längsförmige Windturbulenzen, Zeit- und Bremsereignis-Anwendungsprogrammschnittstellen (APIs) für externe Softwaresynchronisierung und Implementierung der Verhaltensparadigmen wie Auto-Following-Task und N-Back-Task. Obwohl die Durchführung von fahrbezogenen Forschung in einem Fahrsimulator kann nicht vollständig replizieren Fahren in der realen Welt, Daten durch einen Fahrsimulator gesammelt ist vernünftig und wurde von den Forschernangenommen 17,18.
Ein weiterer Vorteil des vorgeschlagenen Fahrsimulators sind die niedrigen Kosten. Wie bereits erwähnt, ist die eingeführte Fahrsimulationssoftware eine Open-Source-Software, die den Nutzern kostenlos zur Verfügung steht. Darüber hinaus sind die Gesamtkosten für die gesamte Hardware-Einrichtung in diesem Protokoll niedriger im Vergleich zu typischen High-Fidelity-Werbesimulatoren. Abbildung 1 a und b zeigen die komplette Einrichtung von zwei Fahrsimulatoren mit Kosten zwischen 3000 und 30000 US-Dollar. Im Gegensatz dazu kosten typische kommerzielle High-Fidelity-Fahrsimulatoren (fixed-base) in der Regel etwa 10.000 bis 100.000 US-Dollar. Mit seinem sehr erschwinglichen Preis kann dieser Fahrsimulator nicht nur für akademische Forschungszwecke, sondern auch für die Durchführung von Fahrklassen19 und für die Demonstration fahrbezogener Technologien eine beliebte Wahl sein20,21.

Abbildung 1: Ein Bild der Fahrsimulatoren. Beide Fahrsimulatoren bestanden aus einem Lenkrad und Getriebe, drei Pedalen und einem Fahrzeug. (a) Ein Fahrsimulator-Setup im Wert von 3000 US-Dollar, das einen 80-Zoll-LCD-Bildschirm mit einer Auflösung von 3840 × 2160 verwendet hat. b) ein Fahrsimulator-Setup im Wert von 30000 USD, bei dem drei montierte Projektoren und drei Projektorbildschirme mit einer Größe von jeweils 223 x 126 cm verwendet wurden. Die Projektionswände wurden 60 cm über dem Boden und 22 cm von der Fahrzeugfront entfernt platziert. Für das aktuelle Experiment wurden nur der zentrale Projektor und die Projektorleinwand verwendet. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Die Fahrsimulationssoftware und das vibrierende Toolkit in der vorgeschlagenen Methode wurden bereits in früheren Studien von unseren Forschern22,23,24,25,26,27,28,29verwendet. Dieses selbst entwickelte Vibrations-Toolkit nach ISO-Norm30 kann in verschiedenen Bereichen31,32 durch Einstellen der Schwingungsfrequenz und -intensität angewendet werden. Es ist wichtig zu beachten, dass eine neuere Version des vibrierenden Toolkits entwickelt wurde und im folgenden Protokoll eingeführt wird. Anstatt die Schwingungsfrequenz mit einem einstellbaren Spannungsadapter einzustellen, ist die neuere Version mit fünf verschiedenen Vibrationsfrequenzen ausgestattet und kann einfacher mit den Codes in Der Supplemental Coding File 1eingestellt werden. Darüber hinaus bietet der vorgestellte Fahrsimulator Forschern eine sichere, kostengünstige und effektive Möglichkeit, verschiedene Arten der fahrbezogenen Forschung zu untersuchen. Somit eignet sich dieses Protokoll für Forschungslaboratorien, die über ein begrenztes Budget verfügen und ein starkes Bedürfnis haben, experimentelle Fahrumgebungen anzupassen.
Protokoll
HINWEIS: Alle hier beschriebenen Methoden wurden vom Institutional Review Board (IRB) der Tsinghua University genehmigt, und alle Teilnehmer haben die Zustimmung in Kenntnis der Sachlage eingeholt.
1. Teilnehmer
- Führen Sie eine Leistungsanalyse durch, um die erforderliche Anzahl von Teilnehmern für die Rekrutierung nach dem experimentellen Design zu berechnen, um statistische Leistung zu erreichen.
- Ausgewogenes Geschlecht der Teilnehmer während der Rekrutierung so weit wie möglich.
- Stellen Sie sicher, dass die Teilnehmer über einen gültigen Führerschein und mindestens ein Jahr Fahrerfahrung verfügen.
- Stellen Sie sicher, dass die Teilnehmer über das Sehdiagramm eine normale oder auf die normale Sicht korrigierte.
- Stellen Sie sicher, dass die Teilnehmer vor dem Experiment nicht innerhalb von 24 stunden Alkohol oder Drogen konsumiert haben, die die Fahrfähigkeiten beeinträchtigen33.
2. Fahrsimulationssoftware-Konfiguration
- Geben Sie den Ordner der Fahrsimulationssoftware ein, gefolgt vom Ordner Runtime und dem Ordner Config. Öffnen Sie dann die Datei "expconfig.txt" (d. h., der Dateipfad sollte "-torcs-1.3.3-Exp-2018-10-25-torcs-1.3.3"-""-Pfad" sein.
- Bestimmen Sie, ob eine Konfiguration angewendet werden soll oder ob Sie mit der Fahrsimulation mit den Standardeinstellungen fortfahren möchten, ohne dass die Konfiguration sofort aus dem Kasten heraus ist, indem Sie auf den experimentellen Entwurf verweisen. Tabelle 1 zeigt eine detaillierte Beschreibung der Standardkonfigurationen aller verfügbaren Optionen.
- Fahren Sie mit Abschnitt 3 des Protokolls fort, wenn keine Änderungen vorgenommen werden sollen.
| Konfigurierbare Optionen | Beschreibungen | Standardeinstellungen |
| endExpByTime | Gibt an, ob die Uhrzeit als Auslöser zum Beenden des Experiments verwendet werden soll. | FALSE |
| endExpAfterMinute | Beenden Sie das Experiment nach diesen Minuten. | 10 |
| endExpByDist | Ob das Auto des Fahrers die Strecke als Auslöser für das Ende des Experiments nutzen soll oder nicht. Wenn sowohl Zeit- als auch Entfernungsauslöser verwendet werden, beenden Sie das Experiment mit dem ersten. | FALSE |
| endExpAfterMeter | Beenden Sie das Experiment, nachdem diese Zähler von der Startlinie aus gefahren wurden. | 5000 |
| enableRandomFrontalWind | Ob es frontalen Wind zu ermöglichen ist (d.h. eine Kraft, die das Auto in die hintere Richtung schiebt) mit zufälligem Intervall und Dauer. | STIMMT |
| frontalWindIntervalMin | Minimalwert (Sekunden) des Frontalwindintervalls. | 3 |
| frontalWindIntervalMax | Maximalwert (Sekunden) des Frontalwindintervalls. | 13 |
| frontalWindDurationMin | Mindestwert (Sekunden) der Frontwinddauer. | 2 |
| frontalWindDurationMax | Maximaler Wert (Sekunden) der Frontwinddauer. | 3 |
| frontalWindForceMin | Mindestwert (Newton) der Frontwindkraft. | 500 |
| frontalWindForceMax | Maximaler Wert (Newton) der Frontwindkraft. | 1000 |
| enableRandomLateralWind | Ob, um seitlichen Wind (d.h. eine Kraft, die das Auto nach links oder rechts drückt) mit zufälligem Intervall und Dauer zu ermöglichen. | STIMMT |
| lateralWindIntervalMin | Mindestwert (Sekunden) des seitlichen Windintervalls. | 3 |
| lateralWindIntervalMax | Maximalwert (Sekunden) des seitlichen Windintervalls. | 8 |
| lateralWindDurationMin | Mindestwert (Sekunden) der seitlichen Winddauer. | 2 |
| lateralWindDurationMax | Maximaler Wert (Sekunden) der seitlichen Winddauer. | 3 |
| seitlichWindForceMin | Mindestwert (Newton) der seitlichen Windstärke. | 1000 |
| seitlichWindForceMax | Maximaler Wert (Newton) der seitlichen Windkraft. | 2000 |
| leadCarConstantSpeedMPH | Konstante Geschwindigkeit des Führenden Fahrzeugs (mph). | 40 |
| leadDistToStartWaiting | Das führende Fahrzeug beginnt auf das Fahrzeug des Fahrers zu warten, wenn der Abstand (Meter) zwischen dem Heck des führenden Fahrzeugs und dem Fahrzeugkopf des Fahrers größer als die angegebene Anzahl ist. | 100 |
| leadDistToStopWaiting | Das führende Auto wartet, bis die Entfernung (Meter) vor dem Auto des Fahrers kleiner als diese Zahl ist. | 80 |
| leadCarBrakeIntervalTimeMin | Minimales zufälliges Zeitintervall (Sekunden) für das zu bremsende Bleifahrzeug. | 30 |
| leadCarBrakeIntervalTimeMax | Maximales zufälliges Zeitintervall (Sekunden) für das zu bremsende Bleifahrzeug. | 60 |
| leadCarBrakeEventDuration | Die Dauer des Führungsbremsereignisses (Sekunden). | 5 |
| EnableRandomSMSSound | Gibt an, ob Der Benachrichtigungssound des Kurznachrichtenservers in zufälligen Intervallen wiedergegeben werden soll. | FALSE |
| randSMSIntervalMin | Minimales zufälliges Zeitintervall (Sekunden) vom Beginn der ersten SMS-Benachrichtigung bis zum Beginn der zweiten SMS-Benachrichtigung. | 2 |
| randSMSIntervalMax | Maximales zufälliges Zeitintervall (Sekunden) vom Beginn der ersten SMS-Benachrichtigung bis zum Beginn der zweiten SMS-Benachrichtigung. | 2 |
| EnableRandomNbackSound | Gibt an, ob N-Back-Zahlensound aktiviert werden soll, der mit zufälligen Intervallen abgespielt wird. | FALSE |
| randNbackIntervalMin | Minimales zufälliges Zeitintervall (Sekunden) vom Beginn des ersten Tons bis zum Beginn des zweiten Tons. | 2.33 |
| randNbackIntervalMax | Maximales zufälliges Zeitintervall (Sekunden) vom Beginn des ersten Tons bis zum Beginn des zweiten Tons. | 2.33 |
| enableUDPSendData | Gibt an, ob die Zeitstempeldatensynchronisierung mit einer bestimmten lokalen Netzwerk-IP aktiviert werden soll. | FALSE |
| enableUDPSendDataAdStudy | Gibt an, ob Daten für die Werbestudie an die folgende IP-Adresse gesendet werden können. Hinweis: Konflikt mit enableUDPSendData. | FALSE |
| UDPTargetIPa1 | IP-Adresse für die UDP-Übertragung | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | Ziel-UDP-Port. | 1234 |
| UDPcycleNumber | Steuern Sie, wie häufig der Zeitstempel gesendet wird. Daten werden gesendet, nachdem jeder UDPcycleNumber von TORCS-Zyklen mit jedem Zyklus ist in der Regel 20 ms. | 1 |
| enableUDPQNConnection | Gibt an, ob die QN-Java-Modelllaufwerksimulation mit dem UDP-Server und dem Client aktiviert werden soll, sind dieselben Computer. | FALSE |
| UDPQNtoTORCSPort | Der UDP QN-Port zur Simulationsportnummer. | 5678 |
| UDPTORCStoQNPort | Der Simulationsport zur UDP QN-Portnummer. | 8765 |
| leadCarBrakingByWebCommand | Gibt an, ob eine Verbindung zu einer Website für das Bremssignal des führenden Fahrzeugs hergestellt werden soll. | FALSE |
| Far_Point_Time_Ahead | Der Parameter, der im Fahrzeugsteuerungsmodell verwendet wird. | 2 |
| enableCarFollowingTraining | Gibt an, ob die simulierte Car-Following-Aufgabe im Trainingsmodus aktiviert werden soll. | / |
| carFollowingTrainingWarningInterval | Zeitintervall vom letzten Alarmtonbeginn bis zum nächsten Warntonbeginn des Trainingsmodus. | 2 |
Tabelle 1: Liste der Standardeinstellungen für die Fahrsimulationssoftware. Eine Liste der Standardwerte aller zugehörigen konfigurierbaren Optionen der Fahrsimulationssoftware zusammen mit einer detaillierten Beschreibung der einzelnen Optionen.
- Konfigurieren Sie die Einstellungen zum Beenden des Experiments basierend auf der entschiedenen Steuerungsvariablen des experimentellen Entwurfs.
- Entscheiden Sie, ob die Uhrzeit als Trigger verwendet werden soll, um das Experiment mit der Option "endExpByTime =" zu beenden, indem Sie entweder True oder False als Auswahl der Optionen verwenden. Legen Sie diese Option auf False fest, um die Exemplarstudie zu replizieren.
- Wählen Sie aus, ob das Experiment mit der als Trigger zurückgelegten Zeit mit der Option "endExpAfterMinute =" beendet werden soll, indem Sie die Anzahl der Minuten im Format mit einer Dezimalstelle eingeben. Die zurückgelegte Zeit kann von den Forschern vollständig entschieden werden. Geben Sie 12 ein, um die Exemplarstudie zu replizieren.
- Legen Sie fest, ob das Experiment mit der zurückgelegten Entfernung als Trigger mit der Option "endExpByDist =" beendet werden soll, indem Sie entweder True oder False als Auswahl der Optionen verwenden. Beachten Sie, dass, wenn sowohl die Optionen "endExpByTime =" als auch "endExpByDist =" auf True festgelegt sind, das Experiment mit der Bedingung endet, die zuerst erfüllt wird. Legen Sie diese Option auf True fest, um die Exemplarstudie zu replizieren.
- Verwenden Sie die Option "endExpAfterMeter =", um die von der Startlinie zurückgelegte Entfernung in Metern im Format mit einer Dezimalstelle festzulegen. Die zurückgelegte Strecke kann von den Forschern vollständig festgelegt werden. Geben Sie 10000.0 ein, um die Exemplarstudie zu replizieren.
- Konfigurieren Sie die Windeinstellungen für die simulierte Fahrumgebung entsprechend der Windgeschwindigkeit34,35 für die virtuelle Umgebung und der kognitiven Belastung36, die in das Experiment initiiert werden soll.
- Legen Sie fest, ob Frontalwind mit zufälligem Intervall und Dauer aktiviert werden soll, indem Sie die Option "enableRandomFrontalWind =" entweder True oder False als Auswahl der Optionen verwenden. Legen Sie diese Option auf True fest, um die Exemplarstudie zu replizieren.
- Definieren Sie das minimale und maximale Frontalwindintervall mit den Optionen "frontalWindIntervalMin =" und "frontalWindIntervalMax =" durch Eingabe der Anzahl der Sekunden im Format mit einer Dezimalstelle. Verwenden Sie die Standardeinstellung (d. h. 3.0 bzw. 13.0), um die Exemplarstudie zu replizieren.
- Definieren Sie die minimale und maximale Frontwinddauer mit den Optionen "frontalWindDurationMin =" und "frontalWindDurationMax =" durch Eingabe der Anzahl der Sekunden im Format mit einer Dezimalstelle. Verwenden Sie die Standardeinstellung (d. h. 2.0 bzw. 3.0), um die Exemplarstudie zu replizieren.
- Definieren Sie die minimale und maximale Frontwindkraft mit den Optionen "frontalWindForceMin =" und "frontalWindForceMax =" durch Angabe der Kraftmenge in Newton. Verwenden Sie die Standardeinstellung (d. h. 500.0 bzw. 1.000.0), um die Exemplarstudie zu replizieren.
- Wählen Sie aus, ob Seitenwind mit zufälligem Intervall und Dauer aktiviert werden soll, indem Sie die Option "enableRandomLateralWind =" entweder True oder False als Auswahl der Optionen verwenden. Legen Sie True fest, um die Exemplarstudie zu replizieren.
- Definieren Sie das minimale und maximale seitliche Windkraftintervall mit den Optionen "lateralWindIntervalMin =" und "lateralWindIntervalMax =" durch Eingabe der Anzahl der Sekunden im Format mit einer Dezimalstelle. Verwenden Sie die Standardeinstellung (d. h. 3.0 bzw. 8.0), um die Exemplarstudie zu replizieren.
- Definieren Sie die minimale und maximale seitliche Winddauer mit den Optionen "lateralWindDurationMin =" und "lateralWindDurationMax =" durch Eingabe der Anzahl der Sekunden im Format mit einer Dezimalstelle. Verwenden Sie die Standardeinstellung (d. h. 2.0 bzw. 3.0), um die Exemplarstudie zu replizieren.
- Definieren Sie die minimale und maximale seitliche Windkraft mit den Optionen "lateralWindForceMin =" und "lateralWindForceMax =" durch Angabe der Kraftmenge in Newton. Verwenden Sie die Standardeinstellung (d. h. 1.000,0 bzw. 2.000,0), um die Exemplarstudie zu replizieren.
- Konfigurieren Sie die Einstellungen für die simulierte Car-Following-Aufgabe entsprechend dem experimentellen Design und benötigt35.
- Stellen Sie die konstante Geschwindigkeit des führenden Fahrzeugs in Meilen pro Stunde mit einer Dezimalstelle mit der Option "leadCarConstantSpeedMPH =" ein. Geben Sie 40 ein, um die Exemplarstudie zu replizieren.
- Definieren Sie den Abstand in Metern mit einer Dezimalstelle zwischen dem führenden Fahrzeug und dem Fahrzeug des Fahrers, um das führende Fahrzeug auszulösen, um zu warten, bis das Fahrzeug des Fahrers aufholt, oder um die Fahrt wieder aufzunehmen, mit den Optionen "leadDistToStartWaiting =" und "leadDistToStopWaiting =" zu verwenden. Verwenden Sie die Standardeinstellung (d. h. 100.0 bzw. 80.0), um die Exemplarstudie zu replizieren.
- Legen Sie das maximale und minimale zuzufällige Zeitintervall der Bleifahrzeugbremsereignisse mit den Optionen "leadCarBrakeIntervalTimeMin =" und "leadCarBrakeIntervalTimeMax =" fest, indem Sie die Anzahl der Sekunden im Format mit einer Dezimalstelle (z. B. 30,0 bzw. 60,0) eingeben. Verwenden Sie die Standardeinstellung (d. h. 30.0 bzw. 60.0), um die Exemplarstudie zu replizieren.
- Definieren Sie die Dauer des Bremsereignisses mit der Option "leadCarBrakeEventDuration =", indem Sie die Anzahl der Sekunden im Format mit einer Dezimalstelle eingeben. Verwenden Sie die Standardeinstellung (d. h. 5.0), um die Exemplarstudie zu replizieren.
- Konfigurieren Sie die Einstellungen für zufällige Kurznachrichtenbenachrichtigungsgeräusche entsprechend dem experimentellen Design und den Anforderungen.
- Entscheiden Sie, ob SMS-Benachrichtigungstöne mit zufälligen Intervallen mit True oder False als Option für die Option "enableRandomSMSSound =" aktiviert werden sollen. Legen Sie die Option auf False fest, um die Exemplarstudie zu replizieren.
- Definieren Sie das minimale und maximale Zeitintervall vom Beginn der ersten SMS-Benachrichtigung bis zum Beginn der zweiten SMS-Benachrichtigung mithilfe der Optionen "randSMSIntervalMin =" und "randSMSIntervalMax =" durch Angabe der Anzahl der Sekunden im Format mit einer Dezimalstelle (z. B. 5.0 bzw. 10.0).
- Konfigurieren Sie die Einstellungen für die simulierte N-Back-Aufgabe37 entsprechend dem experimentellen Design und den Anforderungen.
- Legen Sie N-Back-Zahlentöne so fest, dass sie mit zufälligen Intervallen mit True oder False als Option für die Option "enableRandomNbackSound =" wiedergegeben werden. Legen Sie die Option auf False fest, um die Exemplarstudie zu replizieren.
- Definieren Sie das minimale und maximale Zeitintervall vom Offset des ersten Sounds bis zum Beginn des zweiten Sounds mithilfe der Optionen "randNbackIntervalMin =" und "randNbackIntervalMax =", um die Anzahl der Sekunden im Format mit einer Dezimalstelle (z. B. 5.0 bzw. 10.0) anzugeben.
- Konfigurieren Sie die UdP-Einstellungen (User Datagram Protocol), wenn für das Experiment eine UDP-Datenübertragung erforderlich ist.
- Entscheiden Sie, ob die UDP für die Datenübertragung aktiviert werden soll, indem Sie die Zeitstempeldatensynchronisierung mit einer bestimmten lokalen Netzwerk-IP-Adresse über die Option "enableUDPSendData =" zulassen, indem Sie True oder False als Auswahl der Optionen verwenden. Aktivieren Sie diese Option, um die Exemplarstudie zu replizieren.
- Wählen Sie aus, ob die UDP für die Datenübertragung an eine bestimmte IP-Adresse für eine Werbestudie aktiviert werden soll, indem Sie die Option "enableUDPSendDataAdStudy =" mit True oder False als Auswahl der Optionen aktivieren. Es wird auch daran erinnert, dass diese Option mit dem "enableUDPSendData =" in Konflikt steht und beide Optionen nicht gleichzeitig auf True festgelegt werden können. Legen Sie die Option auf False fest, um die Exemplarstudie zu replizieren.
- Definieren Sie die IP-Adresse für die UDP-Übertragung, indem Sie jeden Abschnitt der IP-Adresse mit "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" und "UDPTargetIPa4 =" angeben.
- Geben Sie die Zielportnummer unter "UDPTargetPort =" an.
- Legen Sie die Häufigkeit für die Daten fest, die unter "UDPcycleNumber =" gesendet werden sollen, wobei jede ganze Zahl größer oder gleich dem Zyklus "1" ist, in dem jeder Zyklus 20 ms beträgt.
- Konfigurieren Sie die UdP-Warteschlangennetzwerk(QN) Modell38-Verbindung unter Bezugnahme auf den experimentellen Entwurf und die Anforderungen.
- Legen Sie fest, ob die QN-Java-Modelllaufwerkssimulation aktiviert werden soll, bei der der UDP-Server und der Client denselben Computer gemeinsam nutzen, mit der Option "enableUDPQNConnection =" unter Verwendung von True oder False als Auswahl der Optionen. Deaktivieren Sie diese Option, um die Exemplarstudie zu replizieren.
- Geben Sie die Nummer vom UDP QN-Port zum Simulationsport unter der Option "UDPQNtoTORCSPort =" an.
- Geben Sie die Nummer vom Simulationsport zum UDP QN-Port unter der Option "UDPTORCStoQNPort =" an.
- Konfigurieren Sie, ob eine Verbindung zu einer Website für Bremssignale gemäß dem experimentellen Design unter der Option "leadCarBrakingByWebCommand =" unter Verwendung von True oder False als Auswahl der Optionen hergestellt werden soll. Bitte beachten Sie, dass, wenn diese Option auf True gesetzt ist, die Option "endExpByTime =" und "endExpAfterMinute =" nicht mehr funktioniert. Legen Sie die Option auf False fest, um die Exemplarstudie zu replizieren.
- Legen Sie fest, ob die simulierte Car-Following-Aufgabe im Trainingsmodus aktiviert werden soll, wobei "enableCarFollowingTraining =" mit True oder False als Auswahl der Optionen verwendet wird.
- Definieren Sie das Intervall vom letzten Alarmtonbeginn bis zum nächsten Warntonbeginn des Trainings mit der Option "carFollowingTrainingWarningInterval =" durch Angabe der Anzahl der Sekunden mit einer Dezimalstelle (z. B. 2,0).
- Speichern Sie die Datei nach Abschluss der Konfiguration.
3. Fahrsimulator Vorbereitung
- Schließen Sie das Lenkrad und den zentralen Projektor (ein montierter Projektor mit einem Seitenverhältnis von 16:10, 192 – 240 Hz Aktualisierungsfrequenz und 8-Bit-Farbverarbeitung) an den Computer an. Eine Projektorscheibe mit einer Größe von 223 x 126 cm wurde 60 cm über dem Boden und 22 cm von der Vorderseite des Instrumentierenden Fahrzeugs entfernt platziert.
- Legen Sie die Bildschirmauflösung unter Optionen | Anzeigen, um die Bildschirmgröße beim Starten der Fahrsimulationssoftware abzugleichen.
- Geben Sie die Seite Konfigurieren ein, um einen Player auszuwählen, und folgen Sie den Anweisungen der Software, um Lenkrad, Gaspedal und Bremspedal zu kalibrieren. Dazu gehören das Drehen des Lenkrads und das Drücken von Gas- und Bremspedal wie angewiesen.
4. Vibrierende Toolkit-Konfiguration und -Vorbereitung
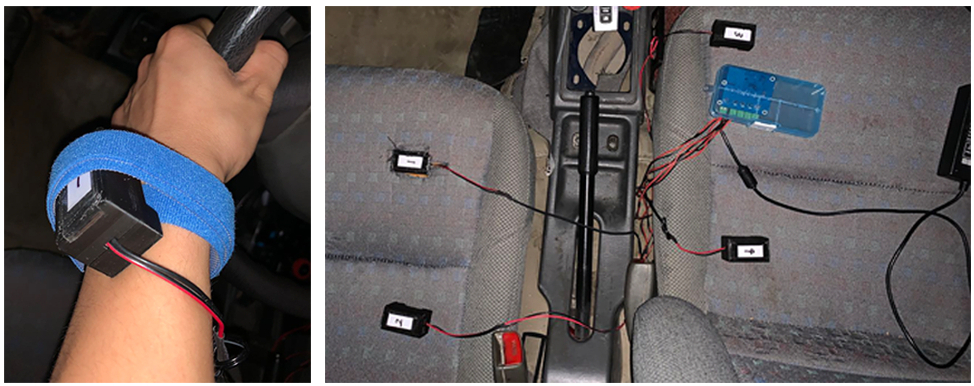
- Schließen Sie das vibrierende Toolkit an das Netzteil an. Jedes der vier Module hat eine Dimension von 67 x 57 x 29 mm. Abbildung 2 zeigt ein Bild des vibrierenden Werkzeugkastens.

Abbildung 2: Bilder des vibrierenden Toolkits. Das vibrierende Toolkit bestand aus vier einzelnen Modulen, die separat aktiviert werden können. Jedes Modul hat eine Dimension von 67 x 57 x 29 mm. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
- Schalten Sie das vibrierende Toolkit ein und verbinden Sie das Toolkit über Bluetooth mit dem Computer.
- Definieren Sie die Schwingungsfrequenz, die für das Experiment verwendet werden soll, wenn Sie einen Pilot-Hautempfindlichkeitstest oder entsprechend den experimentellen Anforderungen abschließen.
- Stellen Sie die Schwingungsfrequenz auf 70 Hz39,40,41 mit den Codes als Supplemental Coding File 1zur Verfügung gestellt. Insgesamt fünf Frequenzstufen (d. h. 14Hz, 28Hz, 42Hz, 56Hz und 70Hz) sind derzeit mit jeder Schwingungsstimulation verfügbar, die standardmäßig 0,5 s dauert.
- Verwenden Sie die Codes, die als Supplemental Coding File 1 bereitgestellt werden, um die Bremsereignisse aus der Fahrsimulationssoftware und dem vibrierenden Toolkit zu synchronisieren. Abbildung 3 zeigt einen beschrifteten Screenshot der Codes, die als Referenz überarbeitet werden sollen.

Abbildung 3: Ein beschrifteter Screenshot der Codes in Der ergänzenden Codierungsdatei 1. Der beschriftete Screenshot von Codes kann als einfachere Referenz für die Konfiguration und Vorbereitung des vibrierenden Toolkits verwendet werden. Diese Codes werden verwendet, um die Schwingungsfrequenz des Toolkits einzustellen und die Bremsereignisse in der Fahrsimulationssoftware und dem vibrierenden Toolkit zu synchronisieren, um vibrierende Warnungen zu erzeugen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
5. Durchführung des Experiments
- Weisen Sie die Teilnehmer an, das Formular für die informierte Zustimmung, das den experimentellen Prozess einführt, zu lesen und zu unterzeichnen und zu erklären, dass die Studie die Fahrleistung bei der Ankunft im Labor bewerten soll.
- Unterstützen Sie die Teilnehmer dabei, den Sitzabstand an das Pedal anzupassen und die Rückenlehne manuell in eine komfortable Position zu stellen.
- Bringen Sie den Teilnehmern bei, wie sie den Simulator bedienen, einschließlich Lenkrad, Bremspedal und Gaspedal.
- Weisen Sie die Teilnehmer an, wie in der realen Welt zu fahren, dem Auto vor ihnen zu folgen und einen Zwei-Sekunden-Vorsprung hinter sich zu halten. Abbildung 4 zeigt die für die Fahrsimulation verwendete Straßenkarte.

Abbildung 4: Straßenkarte für Fahrsimulationen. Die verwendete Straße ist eine Einbahnstraße mit vier Kurven (maximale Länge 15.000 Meter), drei Fahrspuren und ohne Ampel. Die Fahrsimulator-Software bietet andere Straßengestaltungsoptionen, wie z. B. Optionen zum Einschließen von Verkehrsschildern oder Werbetafeln. Eine EEG-kompatible Version ist ebenfalls erhältlich. Alle diese Parameter können bei Bedarf angepasst werden. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
- Informieren Sie die Teilnehmer, so schnell wie möglich zu bremsen, wenn das vordere Fahrzeug bremst, auch wenn das Szenario keine Bremsreaktion erfordert. Die Rückleuchten des vorderen Fahrzeugs leuchten je nach Realefahren auf, um ein Bremsereignis anzuzeigen.
- Bieten Sie den Teilnehmern eine 5-min-Übungsstudie, um zu lernen, einen Zwei-Sekunden-Vorsprung abstand hinter dem vorderen Fahrzeug zu halten. Die Praxisstudie umfasst einen Satz von 5 zufallsseitig bremsenden Bremsen.
- Während des Übungsversuchs, wenn die Teilnehmer weniger als 1,5 s hinter dem vorderen Fahrzeug sind, spielt die Fahrsimulationssoftware eine Eingabeaufforderung mit einer weiblichen Stimme "zu nah, bitte verlangsamen".
- Wenn die Teilnehmer zwischen 2,25 und 2,5 s hinter dem vorderen Fahrzeug liegen, spielt die Fahrsimulationssoftware eine Eingabeaufforderung mit weiblicher Stimme "zu weit, bitte beschleunigen".
- Geben Sie für die Analyse keine Daten aus der Praxisstudie ein.
- Lassen Sie die Teilnehmer wissen, dass die Studie ohne Strafe gestoppt werden kann, indem Sie die Experimentatoren jederzeit, falls erforderlich, benachrichtigen.
- Beginnen Sie das formale Experiment, sobald die Teilnehmer die Übungseinheit abgeschlossen haben und eine stabile folgende Entfernung beibehalten können.
- Beginnen Sie die formelle experimentelle Sitzung, die aus insgesamt vier Blöcken (d. h. Finger, Handgelenk, Tempel und Nur-Fahruhr) mit 13 zufälligen Bremsereignissen in jedem Block besteht, was zu insgesamt 52 experimentellen Versuchen führt. Die Reihenfolge der Bedingungen wird mit der lateinischen quadratischen Gestaltung ausgeglichen. In den formalen Prüfungen wird keine Sprachansage bereitgestellt.
- Unterstützen Sie die Teilnehmer, das vibrierende Toolkit mit medizinischem Klebeband vor jedem Versuchsblock entsprechend den zugewiesenen Bedingungen anzuziehen. Das vibrierende Werkzeugkasten (falls abgenutzt) warnt die Teilnehmer, beim Bremsen des vorderen Fahrzeugs zu bremsen. Die Rückleuchten des vorderen Fahrzeugs werden jedes Mal beleuchtet, wenn das vordere Fahrzeug bremst.
- Stellen Sie sicher, dass die Teilnehmer nach Abschluss jedes Blocks eine 2 min Ruhezeit erhalten, um die Übertragungseffekte zu reduzieren.
- Fragen Sie die Teilnehmer nach ihrem bevorzugten Standort für das vibrierende Toolkit und der wahrgenommenen Schwingungsintensität mit einer 7-Punkte-Likert-Skala nach Abschluss aller Versuche. Die Nutzungsrate jedes täglichen tragbaren Zubehörs (z. B. Uhr, Brille, Kopfhörer und Ring) wird ebenfalls aufgezeichnet. In der Präferenzskala für die Position des vibrierenden Toolkits steht "1" für "least favorite" und "7" für "am meisten Favorit", während in der Schwingungsintensitätsskala "1" "schwaches Gefühl" und "7" für "starkes Gefühl" steht.
6. Datenanalyse
- Sammeln Sie die Fahrverhaltensdaten der Teilnehmer bei 50 Hz mit der Fahrsimulationssoftware, einschließlich der Reaktionszeit der Bremse, der Fahrzeuggeschwindigkeit, der Lenkradumkehrrate, der Spurposition (SDLP) und der Vorfahrtsentfernung usw.
- Führen Sie eine Datenanalyse der Leistung der Fahrer durch.
- Führen Sie eine Ausreißeranalyse mit der Normalverteilung mit Cut-off als drei Standardabweichungen vom Mittelwert durch, um zu bestimmen, welche Daten für die weitere Analyse einbezogen werden sollen.
- Berechnen Sie die Ansprechzeit der Bremse, indem Sie die Zeit subtrahieren, wenn das Teilnehmerfahrzeug bremst (d. h. eine minimale Reduzierung des Bremspedals um 1 %36,42) von dem Zeitpunkt, zu dem das vordere Fahrzeug zu bremsen beginnt.
- Beschriften Sie die Daten als "keine Bremsreaktion", wenn die Bremsansprechzeit größer oder gleich 5 s ist (d. h. ein Nichtbremsverhalten innerhalb von 5 s nach der Bremsung des vorderen Fahrzeugs).
- Teilen Sie die Anzahl der erfolgreichen Bremsen durch die Gesamtzahl der Bremsen, die vom vorderen Fahrzeug durchgeführt werden, um die Bremsansprechrate zu berechnen.
- Durchschnittlich alle Werte jedes Teilnehmers, um die mittlere Bremsansprechrate und die Bremsansprechzeit jeder Bedingung zu erhalten und die Standardabweichung dieser Werte für weitere Analysen zu berechnen.
Ergebnisse
Die in dieser Studie berichtete Exemplar-Studie führte die Auto-Folge-Aufgabe mit dem Fahrsimulator und dem vibrierenden Toolkit durch, das zuvor auch in einer wissenschaftlichen Zeitschrift veröffentlicht wurde22. Bemerkenswert ist, dass die ältere Version des vibrierenden Toolkits bei der Durchführung der Exemplarstudie verwendet wurde, während eine neue Version des vibrierenden Toolkits im obigen Protokoll eingeführt wurde. Die Studie war ein versuchsweises Designexperiment mit vibrierend...
Diskussion
Die Fahrsimulationsplattform und das vibrierende Toolkit imitierten die Anwendung potenzieller tragbarer vibrotaktiler Geräte im realen Leben und lieferten eine effektive Technik bei der Untersuchung der fahrbezogenen Forschung. Mit dieser Technologie steht nun eine sichere Versuchsumgebung mit hoher Konfigurierbarkeit und Erschwinglichkeit für die Durchführung von Forschungen zur Verfügung, die mit dem realen Fahren vergleichbar sind.
Es gibt mehrere Schritte, die mehr Aufmerksamkeit erfo...
Offenlegungen
Die Autoren erklärten keine finanzielle Offenlegung oder Interessenkonflikte.
Danksagungen
Dieses Projekt wurde von der Beijing Talents Foundation gesponsert.
Materialien
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Referenzen
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten