
JoVE 비디오를 활용하시려면 도서관을 통한 기관 구독이 필요합니다. 전체 비디오를 보시려면 로그인하거나 무료 트라이얼을 시작하세요.
Method Article
운전 관련 연구를 위한 촉각 진동 툴킷 및 운전 시뮬레이션 플랫폼
Erratum Notice
요약
이 프로토콜은 운전 시뮬레이션 플랫폼과 운전 관련 연구를 위한 촉각 진동 툴킷에 대해 설명합니다. 촉각 경고의 효과를 탐구하는 모범적인 실험도 제시됩니다.
초록
충돌 경고 시스템은 운전 산만과 졸음 운전을 예방하는 데 중요한 역할을합니다. 이전 연구는 운전자의 브레이크 응답 시간을 줄이는 촉각 경고의 장점을 입증했습니다. 동시에, 부분적으로 자율 주행 차량에 대한 인수 요청(TOR)에 촉각 경고가 효과가 입증되었습니다.
촉각 경고의 성능을 최적화하는 방법은 이 분야에서 지속적인 핫 리서치 주제입니다. 따라서, 제시된 저가형 주행 시뮬레이션 소프트웨어 및 방법은 조사에 참여하기 위해 더 많은 연구자들을 유치하기 위해 도입된다. 제시된 프로토콜은 5개의 섹션으로 나뉘었다: 1) 참가자, 2) 운전 시뮬레이션 소프트웨어 구성, 3) 운전 시뮬레이터 준비, 4) 진동 툴킷 구성 및 준비, 5) 실험을 실시.
모범 연구에서 참가자들은 촉각 진동 툴킷을 착용하고 맞춤형 주행 시뮬레이션 소프트웨어를 사용하여 기존 차량 팔로우 작업을 수행했습니다. 전방 차량은 간헐적으로 제동을 걸었으며, 전방 차량이 제동할 때마다 진동 경고가 전달되었습니다. 참가자들은 전방 차량의 갑작스런 브레이크에 최대한 빨리 대응하라는 지시를 받았습니다. 브레이크 응답 시간 및 브레이크 응답 속도와 같은 주행 역학은 데이터 분석을 위한 시뮬레이션 소프트웨어에 의해 기록되었습니다.
제시된 프로토콜은 다른 신체 위치에 촉각 경고의 효과에 대한 탐구에 대한 통찰력을 제공합니다. 모범 실험에서 입증된 차량 팔로우 작업 외에도 이 프로토콜은 코드 개발 없이 간단한 소프트웨어 구성을 수행하여 운전 시뮬레이션 연구에 다른 패러다임을 적용할 수 있는 옵션을 제공합니다. 그러나 저렴한 가격으로 인해 여기에 도입 된 운전 시뮬레이션 소프트웨어 및 하드웨어가 다른 고충실도 상용 운전 시뮬레이터와 완전히 경쟁하지 못할 수 있음을 주목하는 것이 중요합니다. 그럼에도 불구하고,이 프로토콜은 일반적인 높은 충실도 상용 운전 시뮬레이터에 저렴하고 사용자 친화적 인 대안역할을 할 수 있습니다.
서문
2016년 글로벌 건강 추정치에 의해 밝혀진 데이터에 따르면, 교통 상해는전세계적으로 140만 명의 사망자를 초래하는 세계 적인 죽음의 8번째 원인입니다. 2018년에는 교통사고의 39.2%가 교통차량과 충돌했으며, 그 중 7.2%는 후방 충돌사고였다. 차량 및 도로 안전을 높이는 솔루션은 운전자에게 잠재적인 위험을 경고하는 첨단 주행 보조 시스템(ADAS)의 개발입니다. 데이터에 따르면 ADAS는 후방 충돌 속도를 크게 줄일 수 있으며, 자동 브레이크 시스템2를장착하면 더욱 효과적입니다. 또한 자율주행차의 개발과 함께 차량을 제어하는 데 인적 개입이 적어 자율주행차가 자체적으로 규제하지 않을 경우 인계 요청(TOR) 경고 시스템이 필요합니다. ADAS 및 TOR 경고 시스템의 설계는 이제 운전자가 몇 초 이내에 임박한 사고를 피할 수 있는 중요한 기술입니다. 모범 실험은 진동 툴킷과 주행 시뮬레이션 플랫폼을 사용하여 진동 경고 시스템이 잠재적 ADAS 및 TOR 경고 시스템으로 사용될 때 최상의 결과를 생성할 위치를 조사했습니다.
지각 채널에 의해 분류, 경고 양식의 일반적으로 세 가지 유형이있다, 즉 시각적, 청각, 촉각. 각 경고 양식에는 고유한 장점과 한계가 있습니다. 시각 경고 시스템을 사용할 때, 운전자는 시력 과부하3로인해 부주의 한 실명4,5로인해 운전 성능을 손상시킬 수 있습니다. 청각 경보 시스템은 운전자의 시야에 영향을 미치지 않지만, 그 효과는 배경 음악 및 주행 환경의 기타 소음과 같은 주변 환경에 크게 의존한다6,7. 따라서, 다른 외부 청각 정보 나 상당한 소음이 포함된 상황은 부주의 청각장애8,9로이어질 수 있으며 청각 경보 시스템의 효과를 감소시킬 수 있다. 이에 비해 촉각 경고 시스템은 운전자의 시각 또는 청각 처리와 경쟁하지 않습니다. 운전자에게 진동 경고를 전송하여 촉각 경고 시스템은 시각 및 청각 경고 시스템의 한계를 극복합니다.
이전 연구에 따르면 촉각 경고는 브레이크 응답 시간을 단축하여 운전자에게 도움이 될 수 있습니다. 또한 촉각 경고 시스템이 특정 상황에서 시각적10,11 및 청각12,13,14 경고 시스템에 비해 보다 효과적인 결과를 산출한다는 것을 발견했습니다. 그러나 제한된 연구는 촉각 경고 장치를 배치하기위한 최적의 위치를 조사하는 데 중점을 두어왔습니다. 감각 피질가설(15)과 감각 거리가설(16)에따르면, 모범 연구는 촉각 경고 장치를 배치하기 위한 실험 장소로 손가락, 손목 및 사원 영역을 선택했다. 도입된 프로토콜을 사용하면 진동 경고의 주파수 및 전달 시간 및 진동 툴킷의 진동 사이의 간격을 실험 요구 사항에 맞게 구성할 수 있습니다. 이 진동 툴킷은 마스터 칩, 전압 레귤레이터 칩, 멀티플렉서, 트랜지스터 트랜지스터-로직(TTL) 어댑터에 대한 USB, 금속-산화물 반도체 현장 효과 트랜지스터(MOSFET) 및 블루투스 모듈로 구성되었습니다. 진동 모듈의 수는 연구원의 요구에 따라 달라질 수 있으며 최대 4개의 모듈이 동시에 진동합니다. 주행 관련 실험에서 진동 툴킷을 구현할 때, 주행 시뮬레이션의 코드를 수정하여 실험 설정에 맞게 구성할 수 있을 뿐만 아니라 주행 성능 데이터와 동기화할 수 있다.
연구원의 경우, 가상 플랫폼에서 운전 실험을 수행하는 것은 관련된 위험과 비용으로 인해 실제 세계보다 더 실용적입니다. 예를 들어 성능 지표를 수집하는 것은 어려울 수 있으며 실제 실험이 수행될 때 관련된 환경 요인을 제어하기가 어렵습니다. 그 결과, 많은 연구가 온로드 드라이빙 연구를 수행하기 위한 대안으로 최근 몇 년 동안 PC에서 실행되는 고정 기반 주행 시뮬레이터를 사용했습니다. 드라이빙 리서치 커뮤니티에서 11년 이상 학습, 개발 및 연구를 마친 후, 오픈 소스 드라이빙 시뮬레이션 소프트웨어와 스티어링 휠 및 기어박스, 페달 3개, 장착형 프로젝터 3개, 프로젝터 스크린 3개 등 실제 차량으로 구성된 드라이빙 시뮬레이션 플랫폼을 구축했습니다. 주행 시뮬레이션 소프트웨어는 단일 스크린만 지원하므로 제시된 프로토콜은 중앙 프로젝터 및 프로젝터 스크린만 사용하여 실험을 수행합니다.
제시된 주행 시뮬레이션 플랫폼을 사용하는 데는 두 가지 주요 장점이 있습니다. 이 플랫폼의 한 가지 장점은 오픈 소스 소프트웨어를 사용한다는 것입니다. 연구원은 사용자 친화적인 오픈 소스 플랫폼을 사용하여 코드 개발 없이 간단한 소프트웨어 구성을 수행하여 고유한 연구 요구에 맞게 시뮬레이션 및 진동 툴킷을 사용자 지정할 수 있습니다. 연구진은 코드를 개정함으로써 자동차 유형, 도로 유형, 스티어링 휠의 저항, 측면 및 세로 풍난기류, 시간 및 브레이크 이벤트 애플리케이션 프로그램 인터페이스(API)에서 사용할 수 있는 다양한 옵션을 통해 현실에 상대적 충실도를 제공하는 주행 시뮬레이션을 만들 수 있으며, 외부 소프트웨어 동기화를 위한 시간 및 브레이크 이벤트 애플리케이션 프로그램 인터페이스(API)를 생성하고, 카팔로잉 작업 및 N-Task와 같은 행동 패러다임의 구현을 수행할 수 있습니다. 드라이빙 시뮬레이터에서 운전 관련 연구를 수행하는 것은 실제 주행을 완전히 재현할 수 없지만, 드라이빙 시뮬레이터를 통해 수집된 데이터는 합리적이며연구원(17,18)에의해 널리 채택되었다.
제안 된 운전 시뮬레이터의 또 다른 장점은 저렴한 비용입니다. 앞서 언급했듯이 도입된 주행 시뮬레이션 소프트웨어는 사용자가 무료로 사용할 수 있는 오픈 소스 소프트웨어입니다. 또한 이 프로토콜의 전체 하드웨어 설정의 총 비용은 일반적인 고충실도 상용 운전 시뮬레이터에 비해 낮습니다. 그림 1 a와 b는 $ 3000에서 $ 30000에 이르는 비용으로 두 개의 운전 시뮬레이터의 전체 설정을 보여줍니다. 대조적으로, 전형적인 고충실도 상용 운전 시뮬레이터 (고정 베이스)는 일반적으로 약 $ 10,000에서 $ 100,000의 비용이 듭니다. 매우 저렴한 가격으로,이 운전 시뮬레이터는 학술 연구 목적뿐만 아니라, 운전 클래스(19)를 수행하고 운전 관련 기술의 데모에 대한 뿐만 아니라 인기있는 선택이 될 수있습니다 20,21.

그림 1: 운전 시뮬레이터의 이미지입니다. 두 주행 시뮬레이터는 스티어링 휠과 기어박스, 3개의 페달, 차량으로 구성되었습니다. (a) 3840 × 2160의 해상도와 80 인치 LCD 화면을 사용 하는 $3000 운전 시뮬레이터 설정. (b) 3대의 장착형 프로젝터와 각각 223 x 126cm의 치수를 가진 3개의 프로젝터 스크린을 사용한 $30000 의 드라이빙 시뮬레이터 설정. 프로젝션 스크린은 지상 60cm, 차량 정면에서 22cm 떨어진 곳에 배치되었습니다. 현재 실험에는 중앙 프로젝터 및 프로젝터 스크린만 사용되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
제안된 방법으로 구동 시뮬레이션 소프트웨어 및 진동 툴킷은 이미연구원22,23,24,25,26,27,28,29에의해 이전 연구에서 사용되었습니다. ISO표준(30)에 따른 이러한 자체 개발 진동 툴킷은 진동 주파수 및 강도를 조정하여 서로 다른분야(31,32)에 적용될 수 있다. 진동 도구 키트의 최신 버전이 개발되었으며 다음 프로토콜에 도입되었습니다. 조정 가능한 전압 어댑터를 사용하여 진동 주파수를 조정하는 대신, 최신 버전은 5가지 진동 주파수를 갖추고 있으며, 보충 코딩 파일 1에제공된 코드를 사용하여 쉽게 조정할 수 있다. 또한, 제시 된 운전 시뮬레이터는 안전하고 저렴하며 효과적인 방법으로 연구원에게 다양한 종류의 운전 관련 연구를 조사 할 수있는 방법을 제공합니다. 따라서 이 프로토콜은 예산이 제한되어 있으며 실험 주행 환경을 사용자 지정할 필요가 있는 연구 실험실에 적합합니다.
프로토콜
참고: 여기에 설명된 모든 방법은 칭화 대학의 기관 검토 위원회(IRB)의 승인을 받았으며 모든 참가자로부터 통보된 동의를 얻었습니다.
1. 참가자
- 통계적 힘을 달성하기 위해 실험 설계에 따라 모집에 필요한 참가자 수를 계산하기 위해 전력 분석을 수행합니다.
- 모집 중 참가자의 성별의 균형을 최대한 균형.
- 참가자에게 유효한 운전 면허증과 최소 1년의 운전 경험을 가지고 있는지 확인하십시오.
- 참가자가 비전 차트를 사용하여 정상 또는 정상 시야로 수정되었는지 확인합니다.
- 참가자가 실험33전에 24 시간 이내에 운전 능력에 영향을 미치는 알코올이나 약물을 섭취하지 않았는지 확인하십시오.
2. 시뮬레이션 소프트웨어 구성 을 운전
- 런타임 폴더와 Config 폴더 다음에 구동 시뮬레이션 소프트웨어의 폴더를 입력합니다. 그런 다음 "expconfig.txt" 파일을 엽니다(예: 파일 경로는 "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3\nuntime\config\")여야 합니다.
- 실험 설계를 참조하여 구성을 적용할지 아니면 기본 설정을 사용하여 운전 시뮬레이션을 진행할지 여부를 결정합니다. 표 1에는 사용 가능한 모든 옵션의 기본 구성에 대한 자세한 설명이 표시됩니다.
- 변경되지 않으면 프로토콜의 섹션 3로 진행합니다.
| 구성 가능한 옵션 | 설명 | 기본 설정 |
| 엔덱스비타임 | 실험을 종료하기 위해 시계 시간을 트리거로 사용할지 여부입니다. | False |
| endExpAfterMinute | 이 분 후에 실험을 종료합니다. | 10 |
| 엔덱스비디스트 | 운전자의 자동차를 사용할지 여부는 실험을 종료하기 위한 트리거로 거리를 이동했습니다. 시간과 거리 트리거를 모두 사용하면 먼저 실험이 먼저 발생합니다. | False |
| 엔덱스후미터 | 이 미터가 출발선에서 이동한 후 실험을 종료합니다. | 5000 |
| 랜덤 프론트럴윈드 활성화 | 무작위 간격과 지속 시간으로 정면 바람(즉, 차량을 후방 방향으로 밀어내는 힘)을 사용할지 여부. | 사실 |
| 정면 바람 간격민 | 정면 바람 간격의 최소 값(초)입니다. | 3 |
| 정면 바람 간격맥스 | 정면 바람 간격의 최대 값(초)입니다. | 13 |
| 정면 바람 지속 | 정면 바람 지속 시간의 최소 값(초)입니다. | 2 |
| 정면바람지속도맥스 | 정면 바람 지속 시간의 최대 값(초)입니다. | 3 |
| 정면 윈드포스민 | 정면 풍력의 최소 값(뉴턴). | 500 |
| 프랄윈드포스맥스 | 정면 풍력의 최대 값(뉴턴)입니다. | 1000 |
| 랜덤라탈윈드 활성화 | 임의의 간격과 지속 시간으로 측면 바람(즉, 차량을 좌우 방향으로 밀어내는 힘)을 활성화할지 여부. | 사실 |
| 측면 바람 간격민 | 측면 바람 간격의 최소 값(초)입니다. | 3 |
| 측면 바람 간격맥스 | 측면 바람 간격의 최대 값(초)입니다. | 8 |
| 측면 바람 지속 | 측면 풍속의 최소 값(초)입니다. | 2 |
| 측면 윈드내시전맥스 | 측면 풍속의 최대 값(초)입니다. | 3 |
| 측면 윈드포스민 | 측면 풍력력의 최소 값(뉴턴)입니다. | 1000 |
| 측면 윈드포스맥스 | 측면 풍력력의 최대 값(뉴턴)입니다. | 2000 |
| 리드카콘스탄스피더스피드MPH | 리드 차량 (mph)의 일정한 속도. | 40 |
| 리드 디스트토스타트 대기 | 리드 차량의 꼬리와 운전자의 머리 사이의 거리(미터)가 표시된 숫자보다 크면 납 차량이 운전자의 차량을 기다리기 시작합니다. | 100 |
| 리드 디스트토스톱 대기 | 리드 카는 운전자의 차보다 앞의 거리 (미터)가 이 숫자보다 작을 때까지 기다립니다. | 80 |
| 리드카브레이크 인터벌타임민 | 리드 차량이 브레이크를 밟을 수 있는 최소 무작위 시간 간격(초)입니다. | 30 |
| 리드카브레이크 인터벌타임맥스 | 리드 차량이 브레이크를 밟을 수 있도록 최대 무작위 시간 간격(초)을 제공합니다. | 60 |
| 리드카브레이크이벤트지속 | 리드 차량 브레이크 이벤트 지속 시간(초). | 5 |
| 랜덤심사운드 사용 | 임의의 간격으로 재생 짧은 메시지 서버 알림 사운드를 사용할 지 여부. | False |
| 랜드심스인터벌터밍 | 첫 번째 SMS 알림의 시작부터 두 번째 SMS 알림의 시작까지 최소 임의 시간 간격(초)입니다. | 2 |
| 랜드심스인터벌로맥스 | 첫 번째 SMS 알림 의 시작부터 두 번째 SMS 알림의 시작까지 최대 임의 시간 간격(초)입니다. | 2 |
| 랜덤N백사운드 활성화 | 임의의 간격으로 재생 N-백 번호 사운드를 활성화할지 여부. | False |
| 랜드백인터벌터민 | 첫 번째 사운드의 발병부터 두 번째 사운드의 시작까지 최소 임의 시간 간격(초)입니다. | 2.33 |
| 랜드백인터벌터맥스 | 첫 번째 사운드의 시작부터 두 번째 사운드의 시작까지 최대 무작위 시간 간격(초)입니다. | 2.33 |
| UDPSendData 활성화 | 타임스탬프 데이터 동기화를 특정 로컬 네트워크 IP에 사용하도록 설정할지 여부입니다. | False |
| UDPSendDataAdStudy 활성화 | 광고 연구를 위해 다음 IP로 데이터를 전송할 수 있도록 할지 여부입니다. 참고: 활성화된 UDPSendData와의 충돌. | False |
| UDPTargetIPa1 | UDP 전송을 위한 IP 주소 | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDP타겟포트 | 대상 UDP 포트. | 1234 |
| UDPcycle번호 | 타임스탬프가 전송되는 빈도를 제어합니다. 데이터는 각 주기가 일반적으로 20 ms인 TORCS 주기의 모든 UDPcycle Number를 보낸 후에 전송됩니다. | 1 |
| UDPQN커넥션 활성화 | UDP 서버및 클라이언트를 사용하여 QN-Java 모델 드라이브 시뮬레이션을 사용하도록 설정여부는 동일한 컴퓨터입니다. | False |
| UDPQNTORCS포트 | 시뮬레이션 포트 번호에 대한 UDP QN 포트입니다. | 5678 |
| UDPTORCStoQN포트 | UDP QN 포트 번호로의 시뮬레이션 포트입니다. | 8765 |
| 리드카브라킹바이웹커맨드 | 리드 차량의 제동 신호에 대한 웹 사이트에 연결할지 여부. | False |
| Far_Point_Time_Ahead | 차량 제어 모델에 사용되는 매개 변수입니다. | 2 |
| 활성화카팔로잉트레이닝 | 교육 모드에서 시뮬레이션된 차량 팔로우 작업을 사용하도록 설정할지 여부입니다. | / |
| 카팔로우트레이닝경고간격 | 마지막 경고 소리 시작부터 교육 모드의 다음 경고 소리 개시까지의 시간 간격입니다. | 2 |
표 1: 주행 시뮬레이션 소프트웨어의 기본 설정 목록입니다. 각 옵션에 대한 자세한 설명과 함께 주행 시뮬레이션 소프트웨어의 모든 관련 구성 가능한 옵션의 기본 값 목록입니다.
- 실험 설계의 결정된 제어 변수를 기반으로 실험을 종료하는 방법에 대한 설정을 구성합니다.
- 시계 시간을 트리거로 사용하여 옵션 선택으로 True 또는 False를 사용하여 "endExpByTime=" 옵션으로 실험을 종료할지 여부를 결정합니다. 이 옵션을 False로 설정하여 모범 연구를 복제합니다.
- 소수점 이면으로 형식에 분 수를 입력하여 "endExpAfterMinute=" 옵션을 사용하여 트리거로 이동한 시간으로 실험을 종료할지 여부를 선택합니다. 여행 시간은 전적으로 연구원에 의해 결정될 수 있습니다. 입력 12 모범 연구를 복제합니다.
- 옵션 선택으로 True 또는 False를 사용하여 "endExpByDist =" 옵션을 사용하여 트리거로 이동한 거리로 실험을 종료할지 여부를 설정합니다. "endExpByTime="과 "endExpByDist =" 옵션이 True로 설정된 경우 실험이 먼저 충족되는 조건으로 끝납니다. 이 옵션을 True로 설정하여 모범 연구를 복제합니다.
- "endExpAfterMeter =" 옵션을 사용하여 소수점 한 자리가 있는 형식으로 출발선에서 이동한 거리를 미터로 설정합니다. 이동 거리는 전적으로 연구원에 의해 결정 될 수있다. 입력 10000.0을 사용하여 모범 연구를 복제합니다.
- 가상 환경과 인지부하(36)를 위해 설계된 풍속34,35에 따라 시뮬레이션된 주행 환경에 대한 바람 설정을 구성하여 실험에 착수한다.
- 옵션 의 선택으로 True 또는 False를 사용하여 "활성화랜덤프론트윈드 =" 옵션으로 난폭한 간격과 지속 시간으로 정면 바람을 활성화할지 여부를 설정합니다. 이 옵션을 True로 설정하여 모범 연구를 복제합니다.
- "정면바람 간격 =" 및 "정면바람 간격]을 각각 하나의 소수점으로 포맷의 초 수를 입력하여 최소 및 최대 정면 바람 간격을 정의합니다. 기본 설정(예: 3.0 및 13.0)을 사용하여 모범 연구를 복제합니다.
- "정면바람지속민=" 및 "정면윈드메모리맥스=" 옵션을 각각 하나의 소수점 으로 포맷의 초수를 입력하여 최소 및 최대 전두엽 바람 지속 시간을 정의합니다. 기본 설정(예: 2.0 및 3.0)을 사용하여 모범 연구를 복제합니다.
- "정면윈드포스민=" 및 "정면윈드포스맥스=" 옵션으로 각각 뉴턴의 힘의 양을 표시하여 최소 및 최대 정면 풍력력을 정의합니다. 기본 설정(예: 500.0 및 1,000.0)을 사용하여 모범 연구를 복제합니다.
- 옵션 의 선택으로 True 또는 False를 사용하여 "EnableRandomLateralWind =" 옵션을 사용하여 임의의 간격과 지속 시간으로 측면 바람을 활성화할지 여부를 선택합니다. 모범 연구를 복제하려면 True로 설정합니다.
- "측면 바람 간격 =" 및 "측면 바람 간격Max=" 옵션을 각각 하나의 소수점 으로 포맷의 초 수를 입력하여 최소 및 최대 측면 바람 힘 간격을 정의합니다. 기본 설정(예: 3.0 및 8.0)을 사용하여 모범 연구를 복제합니다.
- "측면 풍중민 =" 및 "측면 바람 지속시간]과 "측면 바람지속가능도=" 옵션을 각각 하나의 소수점 으로 포맷의 초 수를 입력하여 최소 및 최대 측면 바람 지속 시간을 정의합니다. 기본 설정(예: 2.0 및 3.0)을 사용하여 모범 연구를 복제합니다.
- "측면 윈드포스민=" 및 "측면 윈드포스맥스=" 옵션으로 각각 뉴턴의 힘의 양을 표시하여 최소 및 최대 측면 풍력력을 정의합니다. 기본 설정(예: 1,000.0 및 2,000.0)을 사용하여 모범 연구를 복제합니다.
- 실험 설계및35가필요에 따라 시뮬레이션된 차량 팔로우 작업에 대한 설정을 구성합니다.
- "leadCarConstantSpeedMPH] 옵션을 사용하여 단점 한 자리로 시간당 마일로 리드 차량의 일정한 속도를 설정합니다. 입력 (40) 모범 연구를 복제합니다.
- 리드 차량과 운전자 차량 사이의 소수점 1개의 거리를 정의하여 리드 차량이 운전자의 차량을 따라잡기 를 기다리거나 운전을 재개할 수 있도록 "leadDistToStartWaiting="과 "leadDistToStopWaiting=" 옵션으로 주행을 재개합니다. 기본 설정(예: 100.0 및 80.0)을 사용하여 모범 연구를 복제합니다.
- 리드 차량 브레이크 이벤트의 최대 및 최소 임의 시간 간격을 각각 한 개의 소수점(예: 30.0 및 60.0)으로 형식으로 입력하여 "leadCarBrakeIntervalTimeMin=" 및 "리드카브레이크 간격시간Max]를 설정합니다. 기본 설정(예: 30.0 및 60.0)을 사용하여 모범 연구를 복제합니다.
- 단점 이면으로 형식의 초 수를 입력하여 "leadCarBrakeEventDuration=" 옵션으로 브레이크 이벤트 지속 시간을 정의합니다. 기본 설정(예: 5.0)을 사용하여 모범 연구를 복제합니다.
- 실험 설계 및 요구에 따라 임의의 짧은 메시지 알림 소리에 대한 설정을 구성합니다.
- "활성화랜덤SMSSound =" 옵션에 대한 옵션의 선택으로 짧은 메시지 서비스(SMS) 알림 소리가 True 또는 False와 임의의 간격으로 재생할 지 여부를 결정합니다. 모범 연구를 복제하려면 옵션을 False로 설정합니다.
- 첫 번째 SMS 알림 의 개시부터 "randSMSIntervalMin =" 및 "randSMSIntervalMax=" 옵션을 사용하여 두 번째 SMS 알림의 시작부터 최소 시간 간격을 정의하고, 각각 하나의 소수점 장소(예: 5.0 및 10.0)를 가진 형식의 초 수를 표시합니다.
- 실험 설계 및 요구에 따라 시뮬레이션된 N-back작업(37)에 대한 설정을 구성합니다.
- N-백 번호를 설정하면 "EnableRandomNbackSound =" 옵션에 대한 옵션의 선택으로 True 또는 False와 임의의 간격으로 재생됩니다. 모범 연구를 복제하려면 옵션을 False로 설정합니다.
- 첫 번째 사운드의 오프셋에서 두 번째 사운드의 시작까지의 최소 및 최대 시간 간격을 정의하여 "randNbackIntervalMin]과 "randNbackIntervalMax] 옵션을 사용하여 각각 한 소수점(예: 5.0 및 10.0)으로 형식의 초 수를 나타냅니다.
- 실험에 UDP 데이터 전송이 필요한 경우 UDP(사용자 데이터그램 프로토콜) 설정을 구성합니다.
- TRUE 또는 False를 옵션으로 사용하여 "EnableUDPSendData =" 옵션을 통해 특정 로컬 네트워크 IP 주소로 타임스탬프 데이터 동기화를 허용하여 UDP를 데이터 전송에 사용하도록 설정할지 여부를 결정합니다. 이 옵션을 사용하여 모범 연구를 복제합니다.
- UDP가 옵션 선택으로 True 또는 False를 사용하여 "enableUDPSendDataAdStudy =" 옵션을 통해 광고 연구를 위해 특정 IP 주소로 데이터를 전송할 수 있도록 할지 여부를 선택합니다. 또한 이 옵션이 "enableUDPSendData ="와 충돌하며 두 옵션 모두 동시에 True로 설정할 수 없음을 상기시켜 줍니다. 모범 연구를 복제하려면 옵션을 False로 설정합니다.
- "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =", "UDPTargetIPa4 ="를 사용하여 IP 주소의 각 섹션을 지정하여 UDP 전송에 대한 IP 주소를 정의합니다.
- "UDPTargetPort ="에서 대상 포트 번호를 나타냅니다.
- "UDPcycleNumber ="에서 전송되는 데이터의 빈도를 각 주기가 20ms인 "1" 주기보다 크거나 동일한 정수를 설정합니다.
- 실험 설계 및 요구 사항을 참조하여 UDP 큐어링 네트워크(QN) 모델38 연결을 구성합니다.
- UDP 서버와 클라이언트가 동일한 컴퓨터를 공유하는 QN-Java 모델 드라이브 시뮬레이션을 활성화할지 여부를 설정하고 True 또는 False를 사용하여 "ENABLEUDPQNConnection =" 옵션을 선택합니다. 이 옵션을 사용하지 않도록 설정하여 모범 연구를 복제합니다.
- UDP QN 포트에서 "UDPQNtoTORCSPort] 옵션 아래의 시뮬레이션 포트로의 번호를 나타냅니다.
- "UDPTORCStoQNPort] 옵션 에서 시뮬레이션 포트에서 UDP QN 포트로의 번호를 나타냅니다.
- 옵션의 선택으로 True 또는 False를 사용하여 "leadCarBrakingByWebCommand =" 옵션에서 실험 설계에 따라 제동 신호를 위해 웹 사이트에 연결할지 여부를 구성합니다. 이 옵션이 True로 설정되면 "endExpByTime="과 "endExpAfterMinute ="이 작동을 중지합니다. 모범 연구를 복제하려면 옵션을 False로 설정합니다.
- 옵션 선택으로 True 또는 False를 사용하여 "enableCarFollowingTraining ="을 사용하여 교육 모드에서 시뮬레이션 된 자동차 다음 작업을 사용하도록 설정할지 여부를 설정합니다.
- 마지막 경고 소리 개시부터 "carFollowingTraining경고간격 =" 옵션으로 한 소수점 장소(예: 2.0)로 초 수를 표시하여 교육의 다음 경고 사운드 시작에 간격을 정의합니다.
- 구성을 완료할 때 파일을 저장합니다.
3. 운전 시뮬레이터 준비
- 스티어링 휠과 중앙 프로젝터(16:10, 192-240Hz 새로 고침 빈도 및 8비트 색상 처리의 종횡비를 가진 장착된 프로젝터)를 컴퓨터에 연결합니다. 223 x 126cm크기의 프로젝터 스크린은 지상 60cm, 계측차량 정면에서 22cm 떨어진 곳에 배치되었다.
- 옵션 | 아래 화면 해상도 설정 디스플레이를사용하여 주행 시뮬레이션 소프트웨어를 시작할 때 화면 크기와 일치합니다.
- 구성 페이지를 입력하여 플레이어를 선택하고 소프트웨어에서 제공하는 지침을 따라 스티어링 휠, 가속기 및 브레이크 페달을 보정합니다. 여기에는 스티어링 휠을 돌리고 지시에 따라 가속기와 브레이크 페달을 누르는 것이 포함됩니다.
4. 진동 툴킷 구성 및 준비
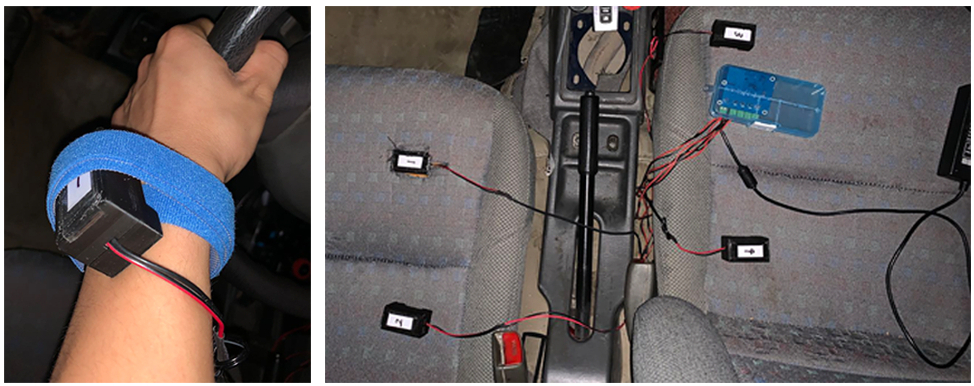
- 진동 툴킷을 전원 공급 장치에 연결합니다. 4개의 모듈 각각은 67 x 57 x 29mm의 치수를 가지며, 그림 2는 진동 툴킷의 이미지를 나타낸다.

그림 2: 진동 도구 키트의 이미지입니다. 진동 툴킷은 별도로 활성화할 수 있는 4개의 개별 모듈로 구성되었습니다. 각 모듈의 치수는 67 x 57 x 29mm입니다.
{kind=link}
- 진동 도구 키트를 켜고 블루투스를 통해 도구 키트를 컴퓨터에 연결합니다.
- 파일럿 피부 감도 테스트를 완료하거나 실험적 요구에 따라 실험에 사용할 진동 주파수를 정의합니다.
- 진동 주파수를 추가 코딩 파일 1로 제공된 코드를 사용하여 진동 주파수를 70Hz39,40,41로 설정합니다. 총 5개의 주파수 레벨(예: 14Hz, 28Hz, 42Hz, 56Hz 및 70Hz)은 기본적으로 0.5s에 지속되는 각 진동 자극과 함께 사용할 수 있습니다.
- 보조 코딩 파일 1로 제공되는 코드를 사용하여 주행 시뮬레이션 소프트웨어및 진동 툴킷의 브레이크 이벤트를 동기화합니다. 그림 3에는 참조로 수정할 코드의 레이블이 지정된 스크린샷을 표시합니다.

그림 3: 보충 코딩 파일 1에서 코드의 레이블이 붙은 스크린샷입니다. 코드의 레이블이 붙은 스크린샷은 진동 툴킷 구성 및 준비에 대한 보다 쉬운 참조로 사용할 수 있습니다. 이러한 코드는 툴킷의 진동 주파수를 설정하고 주행 시뮬레이션 소프트웨어의 브레이크 이벤트를 동기화하고 툴킷을 진동하는 경고를 생성하는 데 사용됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
5. 실험 수행
- 참가자들에게 실험 과정을 소개하는 정보에 입각한 동의서를 읽고 서명하도록 지시하고 연구에 따르면 실험실에 도착하면 운전 성능을 평가하는 것이라고 선언하십시오.
- 참가자들이 페달까지의 좌석 거리를 조정하고 백레스트를 편안한 위치로 수동으로 설정하도록 지원합니다.
- 스티어링 휠, 브레이크 페달, 가속 페달 을 포함하여 시뮬레이터를 작동하는 방법을 참가자에게 가르칩니다.
- 참가자들에게 실제 세계에서와 마찬가지로 운전을 지시하고, 앞차를 따라 가며 2초 의 뒤로 계속 진행하도록 지시합니다. 그림 4는 주행 시뮬레이션에 사용되는 로드맵을 보여 주어 있습니다.

그림 4: 주행 시뮬레이션에 사용되는 로드맵입니다. 사용되는 도로는 4개의 커브(최대 길이 15,000미터), 3차선, 신호등이 없는 단방향 도로입니다. 드라이빙 시뮬레이터 소프트웨어는 도로 표지판이나 광고판을 포함하는 옵션과 같은 다른 도로 설계 옵션을 제공합니다. EEG 호환 버전도 사용할 수 있습니다. 필요한 경우 이러한 모든 매개 변수를 조정할 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
- 시나리오에 브레이크 응답이 필요하지 않더라도 전방 차량 브레이크가 필요할 때마다 가능한 한 빨리 브레이크를 밟도록 참가자에게 알립니다. 전방 차량의 테일라이트는 브레이크 이벤트를 나타내기 위해 실제 주행에 따라 켜집니다.
- 참가자에게 5분 간의 연습 시험을 제공하여 앞차량 뒤에서 2초 의 헤드웨이 거리를 유지하는 법을 배웁니다. 연습 시험에는 5 개의 무작위 브레이크 세트가 포함되어 있습니다.
- 연습 시험 기간 동안 참가자가 앞 차량 뒤에 1.5 초 미만인 경우, 운전 시뮬레이션 소프트웨어는 "너무 가까이, 느려주세요"여성의 목소리로 프롬프트를 재생합니다.
- 참가자가 앞차 뒤에 2.25에서 2.5 사이인 경우, 주행 시뮬레이션 소프트웨어는 "너무 멀리, 속도를 주세요"여성의 목소리로 프롬프트를 재생합니다.
- 분석에 대한 연습 평가판의 데이터를 포함하지 마십시오.
- 참가자에게 필요한 경우 언제든지 실험자에게 통보하여 처벌없이 연구를 중단 할 수 있음을 알려주십시오.
- 참가자가 연습 세션을 완료하고 다음 거리를 안정적으로 유지할 수 있으면 형식 실험을 시작합니다.
- 각 블록에 13개의 무작위 제동 이벤트가 있는 총 4개의 블록(예: 손가락, 손목, 사원 및 운전 전용)으로 구성된 공식 실험 세션을 시작하여 총 52개의 실험 시험을 치게 됩니다. 조건의 순서는 라틴 사각형 디자인과 균형을 맞췄습니다. 공식적인 시험에서는 음성 프롬프트가 제공되지 않습니다.
- 참가자가 할당 된 조건에 따라 시험의 각 블록 전에 의료 테이프를 사용하여 진동 도구 키트에 넣어 지원. 진동 툴킷(착용시)은 참가자에게 전방 차량이 제동할 때 브레이크를 밟도록 경고합니다. 전방 차량의 테일라이트는 전방 차량 브레이크가 작동할 때마다 조명됩니다.
- 참가자에게 이월 효과를 줄이기 위해 각 블록이 완료되면 2분 의 휴식을 취하도록 하십시오.
- 모든 시험이 완료되면 진동 툴킷에 선호하는 위치와 7점 Likert 스케일로 인식된 진동 강도를 요청하십시오. 매일 착용할 수 있는 각 액세서리(예: 시계, 안경, 이어폰 및 링)의 사용률도 기록됩니다. 진동 툴킷의 위치에 대한 선호도 척도에서 "1"은 "가장 좋아하는 것"과 "7"을 나타내며 진동 강도 척도 "1"은 "약한 느낌"과 "7"을 나타내며 "강한 느낌"을 나타냅니다.
6. 데이터 분석
- 브레이크 응답 시간, 차량 속도, 스티어링 휠 반전 속도, 차선 위치(SDLP) 및 헤드웨이 거리 등을 포함한 주행 시뮬레이션 소프트웨어를 사용하여 50Hz에서 참가자의 주행 동작 데이터를 수집합니다.
- 드라이버 의 성능에 대한 데이터 분석을 수행합니다.
- 추가 분석을 위해 포함할 데이터를 결정하기 위해 평균과 세 가지 표준 편차로 차단된 일반 분포를 사용하여 이상치 분석을 수행합니다.
- 전방 차량이 브레이크를 시작할 때부터 참가자 차량 브레이크(예: 브레이크 페달36,42의최소 1%를 최소 1% 감소)를 빼서 브레이크 응답 시간을 계산합니다.
- 브레이크 응답 시간이 5s보다 크거나 같으면 데이터를 "브레이크 응답 없음"으로 레이블을 지정합니다(즉, 전방 차량 브레이크 후 5s 이내에 브레이크가 고장임).
- 브레이크 응답속도를 계산하기 위해 전방 차량이 수행하는 총 브레이크 수로 성공적인 브레이크 수를 나눕니다.
- 각 참가자의 모든 값을 평균하여 각 상태의 평균 브레이크 응답 속도와 브레이크 응답 시간을 얻고 추가 분석을 위해 해당 값에 대한 표준 편차를 계산합니다.
결과
이 논문에 보고된 모범 연구는 운전 시뮬레이터와 진동 툴킷을 사용하여 자동차 다음 작업을 수행했으며, 이는 학술 저널22에이전에 출판되었습니다. 이 진동 도구 키트의 이전 버전은 모범 연구를 수행 할 때 사용된 것을 주목할 만하다, 진동 도구 키트의 새 버전은 위의 프로토콜에 도입 된 동안. 이 연구는 손가락, 손목, 사원 경고 조건 및 운전 전용 상태와 같은 유일한 요인으...
토론
드라이빙 시뮬레이션 플랫폼과 진동 툴킷은 실제 생활에서 잠재적 웨어러블 바이브로타타일 장치를 효과적으로 적용하여 운전 관련 연구를 조사하는 데 효과적인 기술을 제공했습니다. 이 기술을 사용하면 구성성과 경제성이 높은 안전한 실험 환경이 이제 실제 주행에 필적하는 연구를 수행할 수 있습니다.
더 많은 주의가 필요한 몇 가지 단계가 있습니다. 첫째, "expconfig.txt"...
공개
저자는 재정 공개 나 이해 상충을 선언하지 않았습니다.
감사의 말
이 프로젝트는 베이징 인재 재단이 후원하고 있습니다.
자료
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
참고문헌
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유