Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Methods Article
Boîte à outils vibrante tactile et plate-forme de simulation de conduite pour la recherche liée à la conduite
Dans cet article
Résumé
Ce protocole décrit une plate-forme de simulation de conduite et une boîte à outils vibrante tactile pour l’étude de la recherche sur la conduite automobile. Une expérience exemplaire explorant l’efficacité des avertissements tactiles est également présentée.
Résumé
Le système d’avertissement de collision joue un rôle clé dans la prévention des distractions au volant et de la somnolence au volant. Des études antérieures ont prouvé les avantages des avertissements tactiles pour réduire le temps de réponse aux freins du conducteur. Dans le même temps, les avertissements tactiles se sont avérés efficaces dans la demande de reprise (TOR) pour les véhicules partiellement autonomes.
La façon dont les performances des avertissements tactiles peuvent être optimisées est un sujet de recherche brûlant dans ce domaine. Ainsi, le logiciel et les méthodes de simulation de conduite à faible coût présentés sont introduits pour attirer plus de chercheurs à participer à l’enquête. Le protocole présenté a été divisé en cinq sections : 1) les participants, 2) la configuration du logiciel de simulation de conduite, 3) la préparation du simulateur de conduite, 4) la configuration et la préparation de la boîte à outils vibrante, et 5) la réalisation de l’expérience.
Dans l’étude exemplaire, les participants portaient la boîte à outils vibrante tactile et ont effectué une tâche de suivi de voiture établie à l’aide du logiciel de simulation de conduite personnalisé. Le véhicule avant a freiné par intermittence et des avertissements vibrants ont été émis chaque fois que le véhicule avant freinait. Les participants ont reçu l’ordre de réagir le plus rapidement possible aux freins brusques du véhicule avant. La dynamique de conduite, comme le temps de réponse aux freins et le taux de réponse aux freins, a été enregistrée par le logiciel de simulation pour l’analyse des données.
Le protocole présenté offre un aperçu de l’exploration de l’efficacité des avertissements tactiles sur différents emplacements du corps. En plus de la tâche de suivi de voiture qui est démontrée dans l’expérience exemplaire, ce protocole fournit également des options pour appliquer d’autres paradigmes aux études de simulation de conduite en faisant la configuration logicielle simple sans n’importe quel développement de code. Toutefois, il est important de noter qu’en raison de son prix abordable, le logiciel de simulation de conduite et le matériel introduit ici peuvent ne pas être en mesure de rivaliser pleinement avec d’autres simulateurs de conduite commerciale haute fidélité. Néanmoins, ce protocole peut agir comme une alternative abordable et conviviale aux simulateurs de conduite commerciale haute fidélité générale.
Introduction
Selon les données révélées par les Estimations mondiales de la santé en 2016, les accidents de la circulation sont la huitième cause de décès dans le monde, avec 1,4 million de décès dansle monde 1. En 2018, 39,2 % des accidents de la circulation étaient des collisions avec des véhicules automobiles dans les transports, dont 7,2 % étaient des collisions à l’arrière. Une solution pour accroître la sécurité des véhicules et des routes est le développement d’un système avancé d’assistance à la conduite (ADAS) pour avertir les conducteurs des dangers potentiels. Les données ont montré qu’ADAS peut réduire considérablement le taux de collisions arrière, et il est encore plus efficace lorsqu’il est équipé d’un système de freinage automatique2. En outre, avec le développement de véhicules autonomes, moins d’implication humaine sera nécessaire pour contrôler le véhicule, ce qui rend un système d’avertissement de demande de reprise (TOR) une nécessité lorsque le véhicule autonome ne parvient pas à se réguler. La conception du système d’avertissement ADAS et TOR est maintenant un élément important de la technologie pour les conducteurs afin d’éviter les accidents imminents en quelques secondes. L’expérience exemplaire a utilisé une boîte à outils vibrante ainsi qu’une plate-forme de simulation de conduite pour étudier quel emplacement générerait le meilleur résultat lorsqu’un système d’avertissement vibrotactile a été utilisé comme système d’avertissement ADAS et TOR potentiel.
Classés par canaux perceptuels, il existe généralement trois types de modalités d’avertissement, visuelles, auditives et tactiles. Chaque modalité d’avertissement a ses propres mérites et limites. Lorsque des systèmes d’avertissement visuel sont utilisés, les conducteurs peuvent souffrir d’une surchargevisuelle 3,ce qui nuit aux performances de conduite dues à la cécité inattentionnelle4,5. Bien qu’un système d’avertissement auditif n’influence pas le champ visuel des conducteurs, son efficacité dépend grandement de l’environnement comme la musique de fond et d’autres bruits dansl’environnement de conduite 6,7. Ainsi, les situations qui contiennent d’autres informations auditives externes ou un bruit important peuvent conduire à la surdité inattentionnelle8,9, réduisant l’efficacité d’un système d’avertissement auditif. En comparaison, les systèmes d’avertissement tactiles ne sont pas en concurrence avec le traitement visuel ou auditif des conducteurs. En envoyant des avertissements vibrotactiles aux conducteurs, les systèmes d’avertissement tactiles surmontent les limites des systèmes d’avertissement visuels et auditifs.
Des études antérieures ont montré que les avertissements tactiles peuvent profiter aux conducteurs en raccourcissant leur temps de réponse aux freins. Il a également été constaté que les systèmes d’avertissement tactiles donnent un résultat plus efficacesur les systèmes visuels 10,11 etauditifs 12,13,14 dans certaines situations. Toutefois, des recherches limitées ont porté sur l’étude de l’emplacement optimal pour placer un dispositif d’avertissement tactile. Selon l’hypothèse sensorielle de cortex15 et l’hypothèse de distance sensorielle16,l’étude exemplaire a choisi les secteurs de doigt, de poignet, et de temple comme emplacements expérimentaux pour placer un dispositif tactile d’avertissement. Avec le protocole introduit, la fréquence et le temps de livraison d’un avertissement vibrant, et les intervalles entre les vibrations de la boîte à outils vibrante, peuvent être configurés pour répondre aux exigences expérimentales. Cette boîte à outils vibrante se composait d’une puce maîtresse, d’une puce régulateur de tension, d’un multiplexeur, d’un adaptateur USB à Transistor-Transistor-Logic (TTL), d’un transistor métal-oxyde-semi-conducteur à effet de champ (MOSFET) et d’un module Bluetooth. Le nombre de modules vibrants peut également varier en fonction des besoins des chercheurs, avec jusqu’à quatre modules vibrant en même temps. Lors de la mise en œuvre de la boîte à outils vibrante dans les expériences liées à la conduite, il peut être configuré pour s’adapter aux paramètres expérimentaux ainsi que synchronisé avec les données de performance de conduite en révisant les codes de la simulation de conduite.
Alors que pour les chercheurs, mener une expérience de conduite sur une plate-forme virtuelle est plus faisable que dans le monde réel en raison du risque et des coûts impliqués. Par exemple, la collecte d’indicateurs de rendement peut être difficile, et il est difficile de contrôler les facteurs environnementaux impliqués lorsque des expériences sont menées dans le monde réel. Par conséquent, de nombreuses études ont utilisé des simulateurs de conduite à base fixe fonctionnant sur PC au cours des dernières années comme solution de rechange pour mener des études sur la conduite sur route. Après avoir appris, développé et fait des recherches pendant plus de 11 ans dans le milieu de la recherche sur la conduite automobile, nous avons établi une plate-forme de simulation de conduite avec une vraie voiture qui se compose d’un logiciel de simulation de conduite open-source et d’un kit matériel, y compris un volant et une boîte de vitesses, trois pédales, trois projecteurs montés et trois écrans de projecteur. Avec le logiciel de simulation de conduite prend en charge un seul écran, le protocole présenté utilisé uniquement le projecteur central et l’écran du projecteur pour mener l’expérience.
Il y a deux avantages majeurs à utiliser la plate-forme de simulation de conduite présentée. Un avantage de cette plate-forme est qu’elle utilise un logiciel open-source. En utilisant la plate-forme open source conviviale, les chercheurs peuvent personnaliser la simulation et la boîte à outils vibrante pour leurs besoins de recherche uniques en effectuant une configuration logicielle simple sans aucun développement de code. En révisant les codes, les chercheurs peuvent créer des simulations de conduite qui offrent une fidélité relative à la réalité avec beaucoup d’options disponibles sur les types de voitures, les types de routes, la résistance du volant, la turbulence latérale et longitudinale du vent, les interfaces du programme d’application des événements de temps et de frein (API) pour la synchronisation externe des logiciels, et la mise en œuvre des paradigmes comportementaux tels que la tâche de suivi des voitures et la tâche N-Back. Bien que la conduite de recherches liées à la conduite dans un simulateur de conduite ne puisse pas reproduire pleinement la conduite dans le monde réel, les données recueillies au moyen d’un simulateur de conduite sont raisonnables et ont été largementadoptées par les chercheurs 17,18.
Un autre avantage du simulateur de conduite proposé est son faible coût. Comme mentionné précédemment, le logiciel de simulation de conduite introduit est un logiciel open-source qui est disponible gratuitement pour les utilisateurs. En outre, le coût total de l’ensemble de la configuration matérielle dans ce protocole est inférieur par rapport aux simulateurs de conduite commerciale haute fidélité typiques. La figure 1 a et b montre la configuration complète de deux simulateurs de conduite dont le coût est compris entre 3 000 $ et 3 000 $. En revanche, les simulateurs de conduite commerciale haute fidélité typiques (à base fixe) coûtent habituellement entre 10 000 $ et 100 000 $. Avec son prix très abordable, ce simulateur de conduite peut être un choix populaire non seulement à des fins de recherche académique, mais aussi pour la conduite des classesde conduite 19 et pour la démonstration des technologies liées à laconduite 20,21.

Figure 1 : Une image des simulateurs de conduite. Les deux simulateurs de conduite se composaient d’un volant et d’une boîte de vitesses, de trois pédales et d’un véhicule. a) Une configuration de simulateur de conduite de 3 000 $ qui utilisait un écran LCD de 80 pouces avec une résolution de 3840 × 2160. b Une configuration de simulateur de conduite de 30 000 $ qui utilisait trois projecteurs montés et trois écrans de projecteur d’une dimension de 223 x 126 cm chacun. Les écrans de projection ont été placés à 60 cm au-dessus du sol et à 22 cm de l’avant du véhicule. Seuls le projecteur central et l’écran du projecteur ont été utilisés pour l’expérience en cours. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
Le logiciel de simulation de conduite et la boîte à outils vibrante de la méthode proposée ont déjà été utilisés dans des étudesantérieures par nos chercheurs 22,23,24,25,26,27,28,29. Cette boîte à outils vibrante auto-développée suivant la norme ISO30 peut être appliquée dans différentsdomaines 31,32 en ajustant la fréquence et l’intensité des vibrations. Il est important de noter qu’une nouvelle version de la boîte à outils vibrante a été développée et introduite dans le protocole suivant. Au lieu d’ajuster la fréquence des vibrations à l’aide d’un adaptateur de tension réglable, la nouvelle version est équipée de cinq fréquences vibratoires différentes et peut être ajustée plus facilement à l’aide des codes fournis dans le fichier de codage supplémentaire 1. De plus, le simulateur de conduite présenté offre aux chercheurs un moyen sûr, peu coûteux et efficace d’étudier divers types de recherche sur la conduite automobile. Ainsi, ce protocole convient aux laboratoires de recherche qui ont un budget limité et qui ont un fort besoin de personnaliser les environnements de conduite expérimentaux.
Protocole
REMARQUE : Toutes les méthodes décrites ici ont été approuvées par la Commission d’examen institutionnel (CISR) de l’Université de Tsinghua et le consentement éclairé a été obtenu de tous les participants.
1. Les participants
- Effectuer une analyse de puissance pour calculer le nombre requis de participants au recrutement selon la conception expérimentale afin d’atteindre la puissance statistique.
- Équilibrer autant que possible le sexe des participants lors du recrutement.
- Assurez-vous que les participants ont un permis de conduire valide et au moins un an d’expérience de conduite.
- Assurez-vous que les participants ont une vision normale ou corrigée à la normale à l’aide du tableau de vision.
- Assurez-vous que les participants n’ont pas consommé d’alcool ou de drogues qui affectent les capacités de conduite dans les 24 heures précédantl’expérience 33.
2. Configuration de logiciel de simulation de conduite
- Entrez le dossier du logiciel de simulation de conduite, suivi du dossier Runtime et du dossier Config. Ensuite, ouvrez le fichier « expconfig.txt » (c’est-à-dire, le chemin de fichier doit être « \torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\ »).
- Déterminez s’il y a lieu d’appliquer n’importe quelle configuration ou de procéder à la simulation de conduite en utilisant les paramètres par défaut sans aucune configuration fraîchement sortie de la boîte en se référant à la conception expérimentale. Le tableau 1 montre une description détaillée des configurations par défaut de toutes les options disponibles.
- Passez à l’article 3 du protocole si aucun changement ne doit être apporté.
| Options configurables | Descriptions | Paramètres par défaut |
| endExpByTime | Qu’il s’agisse ou non d’utiliser l’heure de l’horloge comme déclencheur pour mettre fin à l’expérience. | Faux |
| endExpAfterMinute | Mettre fin à l’expérience après ces minutes. | 10 |
| endExpByDist | Qu’il s’agisse ou non d’utiliser la voiture du conducteur a parcouru la distance comme déclencheur pour mettre fin à l’expérience. Lorsque des déclencheurs de temps et de distance sont utilisés, mettre fin à l’expérience avec celle qui se produit en premier. | Faux |
| endExpAfterMeter | Mettre fin à l’expérience après que ces compteurs ont été parcourus à partir de la ligne de départ. | 5000 |
| activerRandomFrontalWind | S’il s’agit d’activer le vent frontal (c.-à-d. une force poussant la voiture vers la direction arrière) avec un intervalle et une durée aléatoires. | Vrai |
| frontalWindIntervalMin | Valeur minimale (secondes) de l’intervalle de vent frontal. | 3 |
| frontalWindIntervalMax | Valeur maximale (secondes) de l’intervalle de vent frontal. | 13 |
| frontalWindDurationMin | Valeur minimale (secondes) de la durée du vent frontal. | 2 |
| frontalWindDurationMax | Valeur maximale (secondes) de la durée du vent frontal. | 3 |
| frontalWindForceMin | Valeur minimale (newton) de la force du vent frontal. | 500 |
| frontalWindForceMax | Valeur maximale (newton) de la force du vent frontal. | 1000 |
| activerRandomLateralWind | S’il s’agit d’activer le vent latéral (c.-à-d. une force poussant la voiture vers la direction gauche ou droite) avec un intervalle et une durée aléatoires. | Vrai |
| latéralWindIntervalMin | Valeur minimale (secondes) de l’intervalle de vent latéral. | 3 |
| latéralWindIntervalMax | Valeur maximale (secondes) de l’intervalle latéral du vent. | 8 |
| latéralWindDurationMin | Valeur minimale (secondes) de la durée latérale du vent. | 2 |
| latéralWindDurationMax | Valeur maximale (secondes) de la durée latérale du vent. | 3 |
| latéralWindForceMin | Valeur minimale (newton) de la force latérale du vent. | 1000 |
| latéralWindForceMax | Valeur maximale (newton) de la force latérale du vent. | 2000 |
| leadCarConstantSpeedMPH | Vitesse constante du véhicule de tête (mph). | 40 |
| leadDistToStartWaiting | Le véhicule principal commencera à attendre le véhicule du conducteur lorsque la distance (mètres) entre la queue du véhicule de tête et la tête du véhicule du conducteur sera plus grande que le numéro indiqué. | 100 |
| leadDistToStopWaiting Lead | La voiture de tête attendra que la distance (mètres) devant la voiture du conducteur soit plus petite que ce nombre. | 80 |
| leadCarBrakeIntervalTimeMin | Intervalle de temps aléatoire minimum (secondes) pour que le véhicule de tête freine. | 30 |
| leadCarBrakeIntervalTimeMax | Intervalle de temps aléatoire maximum (secondes) pour que le véhicule principal freine. | 60 |
| leadCarBrakeEventDuration | Durée de l’événement de freinage du véhicule principal (secondes). | 5 |
| activerRandomSMSSound | S’il s’agit d’activer le son de notification du serveur de messages courts joué avec des intervalles aléatoires. | Faux |
| randSMSIntervalMin Rand | Intervalle de temps aléatoire minimum (secondes) entre le début de la première notification SMS et le début de la deuxième notification SMS. | 2 |
| randSMSIntervalMax Rand | Intervalle de temps aléatoire maximum (secondes) entre le début de la première notification SMS et le début de la deuxième notification SMS. | 2 |
| activerRandomNbackSound | S’il s’agit d’activer le son n-back numéro joué avec des intervalles aléatoires. | Faux |
| randNbackIntervalMin Rand | Intervalle de temps aléatoire minimum (secondes) entre le début du premier son et l’apparition du deuxième son. | 2.33 |
| randNbackIntervalMax Rand | Intervalle de temps aléatoire maximum (secondes) entre le début du premier son et l’apparition du deuxième son. | 2.33 |
| activerUDPSendData | S’il s’agit d’activer la synchronisation des données horodatage à un réseau local ip spécifique. | Faux |
| activerUDPSendDataAdStudy | S’il faut activer l’envoi de données à la propriété intellectuelle suivante pour l’étude publicitaire. Remarque : Conflit avec enableUDPSendData. | Faux |
| UDPTargetIPa1 (en) | Adresse IP pour le transfert UDP | / |
| UDPTargetiPa2 (en) | ||
| UDPTargetIPa3 (en) | ||
| UDPTargetIPa4 (en) | ||
| UDPTargetPort (en) | Ciblez le port UDP. | 1234 |
| UDPcycleNumber | Contrôlez la fréquence à l’envoi de l’horodatage. Les données seront envoyées après chaque cycle UDPNumber des cycles TORCS avec chaque cycle est généralement de 20 ms. | 1 |
| activerUDPQNConnection | Qu’il s’agisse ou non d’activer la simulation de lecteur de modèle QN-Java avec le serveur et le client UDP sont le même ordinateur. | Faux |
| UDPQNtoTORCSPort | Le port UDP QN au numéro de port de simulation. | 5678 |
| UDPTORCStoQNPort | Le port de simulation au numéro de port UDP QN. | 8765 |
| leadCarBrakingParWebCommand | S’il vous agit de vous connecter à un site Web pour le signal de freinage du véhicule de tête. | Faux |
| Far_Point_Time_Ahead | Le paramètre utilisé dans le modèle de commande du véhicule. | 2 |
| activerCarFollowingTraining | Que ce soit ou non pour activer la tâche simulée de suivi de voiture en mode formation. | / |
| carFollowingTrainingWarningInterval | Intervalle de temps entre le dernier début du son d’avertissement et le début sonore d’avertissement suivant du mode d’entraînement. | 2 |
Tableau 1 : Liste des paramètres par défaut pour le logiciel de simulation de conduite. Une liste des valeurs par défaut de toutes les options configurables associées du logiciel de simulation de conduite ainsi qu’une description détaillée de chaque option.
- Configurer les paramètres sur la façon de terminer l’expérience en fonction de la variable de contrôle décidée de la conception expérimentale.
- Décidez d’utiliser l’heure de l’horloge comme déclencheur pour mettre fin à l’expérience avec l’option « endExpByTime = » en utilisant true ou false comme choix d’options. Réglez cette option à Faux pour reproduire l’étude exemplaire.
- Sélectionnez s’il faut mettre fin à l’expérience avec le temps parcouru comme déclencheur avec l’option « endExpAfterMinute = » en entravant le nombre de minutes dans le format avec une décimale. Le temps parcouru peut être entièrement décidé par les chercheurs. Entrée 12 pour reproduire l’étude exemplaire.
- Définissez s’il y a lieu de mettre fin à l’expérience avec la distance parcourue comme déclencheur avec l’option « endExpByDist = » en utilisant true ou false comme choix d’options. Notez que lorsque les options « endExpByTime = » et « endExpByDist = » sont définies sur True, l’expérience se terminera par la condition qui est remplie en premier. Réglez cette option à True pour reproduire l’étude exemplaire.
- Utilisez l’option « endExpAfterMeter = » pour définir la distance parcourue à partir de la ligne de départ en mètres dans le format avec une décimale. La distance parcourue peut être décidée entièrement par les chercheurs. Entrée 10000.0 pour reproduire l’étude exemplaire.
- Configurer les réglages du vent pour l’environnement de conduite simulé en fonction de la vitessedu vent 34,35 conçu pour l’environnement virtuel et la charge cognitive36 à initier à l’expérience.
- Définissez s’il y a lieu d’activer le vent frontal avec intervalle et durée aléatoires avec l’option « enableRandomFrontalWind = » en utilisant true ou false comme choix d’options. Réglez cette option à True pour reproduire l’étude exemplaire.
- Définissez l’intervalle de vent frontal minimum et maximum avec les options « frontalWindIntervalMin = » et « frontalWindIntervalMax = » en entravant le nombre de secondes dans le format avec une décimale, respectivement. Utilisez le paramètre par défaut (c.-à-d. 3,0 et 13,0, respectivement) pour reproduire l’étude exemplaire.
- Définissez la durée minimale et maximale du vent frontal avec les options « frontalWindDurationMin = » et « frontalWindDurationMax = » en entravant le nombre de secondes dans le format avec une décimale, respectivement. Utilisez le paramètre par défaut (c.-à-d. 2,0 et 3,0, respectivement) pour reproduire l’étude exemplaire.
- Définissez la force minimale et maximale du vent frontal avec les options « frontalWindForceMin = » et « frontalWindForceMax = » en indiquant la quantité de force dans newton, respectivement. Utilisez le paramètre par défaut (c.-à-d. 500,0 et 1 000,0, respectivement) pour reproduire l’étude exemplaire.
- Choisissez d’activer le vent latéral avec intervalle aléatoire et durée avec l’option « enableRandomLateralWind = » en utilisant true ou false comme choix d’options. Mis à True pour reproduire l’étude exemplaire.
- Définissez l’intervalle de force latérale minimale et maximale avec les options « lateralWindIntervalMin = » et « lateralWindIntervalMax = » en entravant le nombre de secondes dans le format avec une décimale, respectivement. Utilisez le paramètre par défaut (c.-à-d. 3,0 et 8,0, respectivement) pour reproduire l’étude exemplaire.
- Définissez la durée minimale et maximale du vent latéral avec les options « lateralWindDurationMin = » et « lateralWindDurationMax = » en entravant le nombre de secondes dans le format avec une décimale, respectivement. Utilisez le paramètre par défaut (c.-à-d. 2,0 et 3,0, respectivement) pour reproduire l’étude exemplaire.
- Définissez la force latérale minimale et maximale du vent avec les options « lateralWindForceMin = » et « lateralWindForceMax = » en indiquant la quantité de force dans newton, respectivement. Utilisez le paramètre par défaut (c.-à-d. 1 000,0 et 2 000,0, respectivement) pour reproduire l’étude exemplaire.
- Configurer les paramètres de la tâche de suivi de voiture simulée en fonction de la conception expérimentale et a besoinde 35.
- Réglez la vitesse constante du véhicule de tête en miles par heure avec une décimale en utilisant l’option « leadCarConstantSpeedMPH = ». Entrée 40 pour reproduire l’étude exemplaire.
- Définissez la distance en mètres avec une décimale entre le véhicule de tête et le véhicule du conducteur pour déclencher le véhicule principal pour commencer à attendre que le véhicule du conducteur se rattrape, ou pour reprendre la conduite, avec les options « leadDistToStartWaiting = » et « leadDistToStopWaiting = », respectivement. Utilisez le paramètre par défaut (c.-à-d. 100,0 et 80,0, respectivement) pour reproduire l’étude exemplaire.
- Définissez l’intervalle de temps aléatoire maximal et minimum des événements de freinage du véhicule principal avec les options « leadCarBrakeIntervalTimeMin = » et « leadCarBrakeIntervalTimeMax = » en entravant le nombre de secondes dans le format avec une décimale (p. ex., 30,0 et 60,0), respectivement. Utilisez le paramètre par défaut (c.-à-d. 30,0 et 60,0 respectivement) pour reproduire l’étude exemplaire.
- Définissez la durée de l’événement de freinage avec l’option « leadCarBrakeEventDuration = » en entrant le nombre de secondes dans le format avec une décimale. Utilisez le paramètre par défaut (c.-à-d. 5,0) pour reproduire l’étude exemplaire.
- Configurez les paramètres pour le son aléatoire de notification de message court selon la conception expérimentale et les besoins.
- Décider s’il y a lieu d’activer les sons de notification de service de messages courts (SMS) jouer avec des intervalles aléatoires avec True or False comme choix d’options pour l’option « enableRandomSMSSound = ». Définissez l’option de Faux pour reproduire l’étude exemplaire.
- Définissez l’intervalle de temps minimum et maximum entre le début de la première notification SMS et le début de la deuxième notification SMS à l’aide des options « randSMSIntervalMin = » et « randSMSIntervalMax = », en indiquant le nombre de secondes dans le format avec une décimale (p. ex., 5,0 et 10,0) respectivement.
- Configurer les paramètres de la tâche n-back simulée37 en fonction de la conception expérimentale et des besoins.
- Définissez les sons de numéro N-back pour jouer avec des intervalles aléatoires avec True or False comme choix d’options pour l’option « enableRandomNbackSound = ». Définissez l’option de Faux pour reproduire l’étude exemplaire.
- Définissez l’intervalle de temps minimum et maximum entre le décalage du premier son et le début du deuxième son à l’aide des options « randNbackIntervalMin = » et « randNbackIntervalMax = » pour indiquer le nombre de secondes dans le format avec une décimale (p. ex., 5,0 et 10,0), respectivement.
- Configurez les paramètres du protocole de datagram utilisateur (UDP) si un transfert de données UDP est nécessaire pour l’expérience.
- Décider s’il faut activer l’UDP pour le transfert de données en permettant la synchronisation des données horodatage à une adresse IP réseau locale spécifique via l’option « enableUDPSendData = » en utilisant True or False comme choix d’options. Activez cette option pour reproduire l’étude exemplaire.
- Sélectionnez s’il faut activer l’UDP pour le transfert de données vers une adresse IP spécifique pour une étude publicitaire via l’option « enableUDPSendDataAdStudy = » utilisant True or False comme choix d’options. Il est également rappelé que cette option est en conflit avec le « enableUDPSendData = » et les deux options ne peuvent pas être définies sur True en même temps. Définissez l’option de Faux pour reproduire l’étude exemplaire.
- Définissez l’adresse IP pour le transfert UDP en spécifier chaque section de l’adresse IP à l’aide de « UDPTargetIPa1 = », « UDPTargetIPa2 = », « UDPTargetIPa3 = », et « UDPTargetIPa4 = ».
- Indiquez le numéro de port cible sous « UDPTargetPort = ».
- Définissez la fréquence d’envoi des données sous « UDPcycleNumber = » avec tout entier supérieur ou égal au cycle « 1 » dans lequel chaque cycle est de 20 ms.
- Configurer la connexion UDP queuing network (QN)38 en référence à la conception expérimentale et aux besoins.
- Définissez s’il faut activer ou non la simulation de lecteur de modèle QN-Java dans laquelle le serveur et le client UDP partagent le même ordinateur, avec l’option « enableUDPQNConnection = » utilisant True or False comme choix d’options. Désactiver cette option pour reproduire l’étude exemplaire.
- Indiquez le numéro du port UDP QN au port de simulation dans le cadre de l’option « UDPQNtoTORCSPort = ».
- Indiquez le nombre du port de simulation au port QN UDP dans le cadre de l’option « UDPTORCStoQNPort = ».
- Configurer s’il y a lieu de se connecter à un site Web pour les signaux de freinage selon la conception expérimentale sous l’option « leadCarBrakingByWebCommand = » en utilisant True ou False comme choix d’options. Veuillez noter que lorsque cette option est définie sur True, les « endExpByTime = » et « endExpAfterMinute = » cesseront de fonctionner. Définissez l’option de Faux pour reproduire l’étude exemplaire.
- Définissez s’il y a lieu d’activer la tâche de suivi de voiture simulée en mode formation avec le « enableCarFollowingTraining = » en utilisant True or False comme choix d’options.
- Définissez l’intervalle entre le dernier début du son d’avertissement et le début sonore d’avertissement suivant de l’entraînement avec l’option « carFollowingTrainingWarningInterval = » en indiquant le nombre de secondes avec une décimale (p. ex., 2,0).
- Enregistrez le fichier à la fin de la configuration.
3. Préparation de simulateur de conduite
- Connectez le volant et le projecteur central (un projecteur monté avec un rapport d’aspect de 16:10, 192 - 240 Hz fréquence de rafraîchissement, et le traitement des couleurs 8 bits) à l’ordinateur. Un écran de projecteur d’une dimension de 223 x 126 cm a été placé à 60 cm au-dessus du sol et à 22 cm de l’avant du véhicule instrumenté.
- Réglez la résolution de l’écran sous Options | Afficher, pour correspondre à la taille de l’écran lors du démarrage du logiciel de simulation de conduite.
- Entrez la page Configure pour sélectionner un joueur et suivez les instructions fournies par le logiciel pour calibrer le volant, l’accélérateur et la pédale de frein. Il s’agit notamment de tourner le volant et d’appuyer sur l’accélérateur et la pédale de frein selon les instructions.
4. Configuration et préparation vibrantes de boîte à outils
- Connectez la boîte à outils vibrante à l’alimentation électrique. Chacun des quatre modules a une dimension de 67 x 57 x 29 mm. La figure 2 montre une image de la boîte à outils vibrante.

Figure 2 : Images de la boîte à outils vibrante. La boîte à outils vibrante se composait de quatre modules individuels qui peuvent être activés séparément. Chaque module a une dimension de 67 x 57 x 29 mm. Veuillez cliquer ici pour voir une version plus grande de cette figure.
{kind=link}
- Allumez la boîte à outils vibrante et connectez la boîte à outils à l’ordinateur via Bluetooth.
- Définissez la fréquence des vibrations à utiliser pour l’expérience lors d’un test pilote de sensibilité de la peau ou selon des besoins expérimentaux.
- Réglez la fréquence des vibrations à 70 Hz39,40,41 en utilisant les codes fournis comme fichier de codage supplémentaire 1. Un total de cinq niveaux de fréquence (c.-à-d., 14Hz, 28Hz, 42Hz, 56Hz, et 70Hz) sont actuellement disponibles avec chaque stimulation de vibration qui dure pendant 0.5 s par défaut.
- Utilisez les codes fournis comme fichier de codage supplémentaire 1 pour synchroniser les événements de freinage à partir du logiciel de simulation de conduite et de la boîte à outils vibrante. La figure 3 montre une capture d’écran étiquetée des codes à réviser comme référence.

Figure 3 : Capture d’écran étiquetée des codes dans le fichier de codage supplémentaire 1. La capture d’écran étiquetée des codes peut être utilisée comme une référence plus facile pour la configuration et la préparation de la boîte à outils vibrante. Ces codes sont utilisés pour définir la fréquence des vibrations de la boîte à outils, et pour synchroniser les événements de freinage dans le logiciel de simulation de conduite et la boîte à outils vibrante pour générer des avertissements vibrants. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
5. Mener l’expérience
- Demandez aux participants de lire et de signer le formulaire de consentement éclairé qui introduit le processus expérimental et de déclarer que l’étude est d’évaluer le rendement au volant à leur arrivée au laboratoire.
- Aidez les participants à ajuster la distance du siège à la pédale et réglez manuellement l’arrière à une position confortable.
- Apprenez aux participants comment faire fonctionner le simulateur, y compris le volant, la pédale de frein et la pédale d’accélérateur.
- Demandez aux participants de conduire comme ils le feraient dans le monde réel, en suivant la voiture en face d’eux et en gardant une avance de deux secondes derrière elle. La figure 4 montre la feuille de route utilisée pour la simulation de conduite.

Figure 4 : Feuille de route utilisée pour la simulation de conduite. La route utilisée est une route à sens unique avec quatre courbes (longueur maximale de 15.000 mètres), trois voies, et sans feux de circulation. Le logiciel de simulateur de conduite offre d’autres options de conception routière telles que des options pour inclure des panneaux routiers ou des panneaux d’affichage. Une version compatible EEG est également disponible. Tous ces paramètres peuvent être ajustés, si nécessaire. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Informez les participants de freiner le plus tôt possible chaque fois que le véhicule avant freine, même si le scénario ne nécessite pas de réponse aux freins. Les feux arrière du véhicule avant s’allumeront selon la conduite réelle pour indiquer un événement de frein.
- Offrez aux participants un essai pratique de 5 minutes pour apprendre à maintenir une distance de deux secondes derrière le véhicule avant. L’essai pratique comprend un ensemble de 5 freins aléatoires.
- Pendant l’essai d’entraînement, si les participants sont moins de 1,5 s derrière le véhicule avant, le logiciel de simulation de conduite jouera une invite avec une voix féminine « trop près, s’il vous plaît ralentir ».
- Si les participants sont entre 2,25 et 2,5 s derrière le véhicule avant, le logiciel de simulation de conduite jouera une invite avec une voix féminine « trop loin, s’il vous plaît accélérer ».
- N’incluez pas les données de l’essai pratique pour l’analyse.
- Faites savoir aux participants que l’étude peut être arrêtée sans aucune pénalité en avisant les expérimentateurs à tout moment, si nécessaire.
- Commencez l’expérience formelle une fois que les participants ont terminé la séance d’entraînement et peuvent maintenir une distance suivante stable.
- Commencez la session expérimentale formelle, qui se compose d’un total de quatre blocs (c.-à-d. doigt, poignet, temple, et conduite seulement) avec 13 événements aléatoires de freinage dans chaque bloc, ayant pour résultat un total de 52 essais expérimentaux. L’ordre des conditions est contrebalancé par la conception carrée latine. Aucune invite vocale n’est fournie dans les essais officiels.
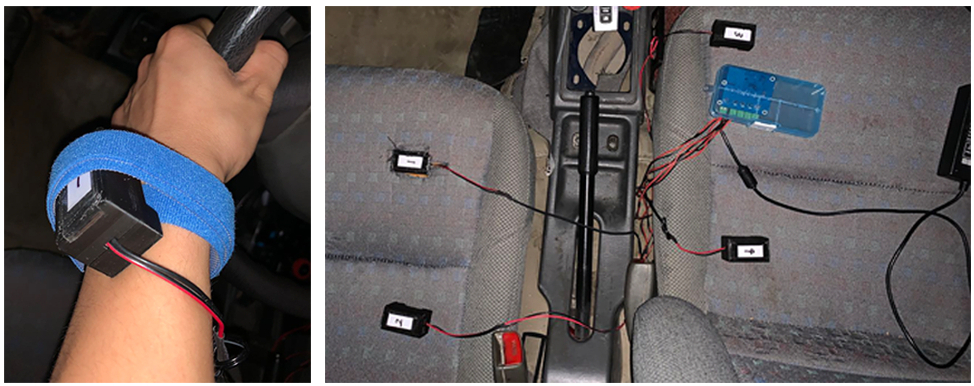
- Aider les participants à mettre sur la boîte à outils vibrante à l’aide de ruban médical avant chaque bloc d’essais en fonction des conditions assignées. La boîte à outils vibrante (si elle est usée) avertit les participants de freiner lorsque le véhicule avant freine. Les feux arrière du véhicule avant sont allumés chaque fois que le véhicule avant freine.
- Assurez-vous que les participants reçoivent un repos de 2 minutes à la fin de chaque bloc afin de réduire les effets de report.
- Demandez aux participants leur emplacement préféré pour la boîte à outils vibrante et l’intensité perçue des vibrations avec une échelle likert de 7 points à la fin de tous les essais. Le taux d’utilisation de chaque accessoire portable quotidien (c.-à-d. montre, lunettes, écouteurs et bague) est également enregistré. Dans l’échelle de préférence pour l’emplacement de la boîte à outils vibrante, « 1 » représente « moins favori » et « 7 » représente « le plus favori », tandis que dans l’échelle d’intensité vibratoire « 1 » représente « sentiment faible » et « 7 » représente « sentiment fort ».
6. Analyse des données
- Recueillir les données sur le comportement de conduite des participants à 50 Hz à l’aide du logiciel de simulation de conduite, y compris le temps de réponse aux freins, la vitesse du véhicule, le taux d’inversion du volant, la position de la voie (SDLP) et la distance de marche, etc.
- Effectuer une analyse des performances des pilotes.
- Effectuer une analyse aberrante à l’aide de la distribution normale avec coupure comme trois écarts types par rapport à la moyenne pour déterminer quelles données doivent être incluses pour une analyse plus approfondie.
- Calculer le temps de réponse aux freins en soustrayant le moment où le véhicule participant freine (c.-à-d. une réduction minimale de 1 % de la pédalede frein 36,42) à partir du moment où le véhicule avant commence à freiner.
- Étiquetez les données comme « pas de réponse aux freins » si le temps de réponse au freinage est supérieur ou égal à 5 s (c.-à-d. un défaut de freiner dans les 5 s après les freins avant du véhicule).
- Divisez le nombre de freins réussis par le nombre total de freins effectués par le véhicule avant pour calculer le taux de réponse aux freins.
- Faire la moyenne de toutes les valeurs de chaque participant pour obtenir le taux moyen de réponse aux freins et le temps de réponse aux freins de chaque condition et calculer l’écart type sur ces valeurs pour des analyses plus approfondies.
Résultats
L’étude exemplaire rapportée dans cet article a mené la tâche de voiture-suivant utilisant le simulateur de conduite et la boîte à outils vibrante, qui a également été éditée précédemment dans une revue universitaire22. Il convient de noter que l’ancienne version de la boîte à outils vibrante a été utilisée lors de l’étude exemplaire, tandis qu’une nouvelle version de la boîte à outils vibrante a été introduite dans le protocole ci-dessus. L’étude était une expé...
Discussion
La plate-forme de simulation de conduite et la boîte à outils vibrante imitaient raisonnablement l’application d’appareils vibrotactiles portables potentiels dans la vie réelle, fournissant une technique efficace pour étudier la recherche liée à la conduite. Grâce à l’utilisation de cette technologie, un environnement expérimental sûr avec une configurabilité et une abordabilité élevées est maintenant disponible pour mener des recherches comparables à la conduite dans le monde réel.
Déclarations de divulgation
Les auteurs n’ont déclaré aucune divulgation financière ou conflit d’intérêts.
Remerciements
Ce projet a été parrainé par la Beijing Talents Foundation.
matériels
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Références
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.