
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
走行関連研究のための触覚振動ツールキットとドライビングシミュレーションプラットフォーム
Erratum Notice
要約
このプロトコルは、運転シミュレーションプラットフォームと、運転関連研究の調査のための触覚振動ツールキットを記述します。触覚警告の有効性を探る模範的な実験も提示される。
要約
衝突警報システムは、気晴らしや眠気運転の防止に重要な役割を果たしています。これまでの研究では、ドライバーのブレーキ応答時間を短縮する際の触覚警告の利点が実証されています。同時に、触覚警告は、部分的に自律走行車の引き継ぎ要求(TOR)に有効であることが証明されています。
触覚警告の性能を最適化する方法は、この分野で進行中のホットな研究トピックです。このように、提示された低コストの運転シミュレーションソフトウェアと方法は、調査に参加するより多くの研究者を引き付けるために導入されています。提示されたプロトコルは、5つのセクションに分かれています:1)参加者、2)運転シミュレーションソフトウェア構成、3)ドライビングシミュレータ調製、4)振動ツールキットの構成と準備、および5)実験を行う。
例示的な研究では、参加者は触覚振動ツールキットを着用し、カスタマイズされたドライビングシミュレーションソフトウェアを使用して確立された車に続くタスクを実行しました。フロント車両は断続的にブレーキをかけ、前部車両がブレーキをかけるたびに振動警告が発令されました。参加者は、前部車両の突然のブレーキにできるだけ早く対応するように指示されました。ブレーキの応答時間やブレーキ応答率などの駆動ダイナミクスを、データ解析用のシミュレーションソフトウェアによって記録した。
提示されたプロトコルは異なったボディの位置の蝕知の警告の有効性についての洞察を提供する。このプロトコルは、例示実験で実証されている自動車フォロータスクに加えて、コード開発なしで簡単なソフトウェア構成を行うことで、他のパラダイムを運転シミュレーションスタディに適用するオプションも提供します。しかし、手頃な価格のため、ここで紹介するドライビングシミュレーションソフトウェアとハードウェアは、他の忠実度の高い商用ドライビングシミュレータと完全に競合することができない可能性があることに注意することが重要です。それにもかかわらず、このプロトコルは、一般的な高忠実度の商業運転シミュレータに代わる手頃な価格でユーザーフレンドリーな代替手段として機能することができます。
概要
2016年にグローバルヘルスの推計が明らかにしたデータによると、交通傷害は世界で死亡した8番目の原因であり、世界中で140万人の死亡につながっています。2018年の交通事故の39.2%が輸送中の自動車との衝突で、そのうち7.2%が追突事故でした。車両および交通安全を高めるソリューションは、潜在的な危険を伴うドライバーに警告する高度運転支援システム(ADAS)の開発です。データは、ADASが追突衝突の速度を大幅に減少させることができることを示しており、オートブレーキシステム2を装備するとさらに効果的です。また、自律走行車の開発に伴い、車両の制御に人的関与が少なくなり、自律走行車が自らを規制できない場合に引き継ぎ要求(TOR)警告システムが必要になります。ADASおよびTOR警告システムの設計は、数秒以内に差し迫った事故を回避するために、ドライバーにとって重要な技術の一部となっています。例示的な実験では、振動ツールキットとドライビングシミュレーションプラットフォームを使用して、潜在的なADASおよびTOR警告システムとしてvibrotactile警告システムが使用されたときに最良の結果を生成する場所を調査しました。
知覚チャネルによって分類される警告モダリティには、一般的に、視覚、聴覚、および触覚の 3 種類があります。各警告モダリティには、独自のメリットと制限があります。視覚警告システムが使用されている場合、ドライバーは目視過負荷3に苦しむことがあり、不注意失明4、5による運転性能を損なう可能性があります。聴覚警告システムは、ドライバーの視野に影響を与えませんが、その有効性は、6,7の運転環境におけるバックグラウンドミュージックやその他の騒音などの環境に大きく依存します。したがって、他の外部聴覚情報や重大な騒音を含む状況は、不注意難聴8、9をもたらし、聴覚警告システムの有効性を低下させる可能性があります。それに比べて、触覚警告システムはドライバーの視覚または聴覚処理と競合しません。ドライバーにバイブロタイル警告を送信することにより、触覚警告システムは、視覚および聴覚警告システムの限界を克服します。
以前の研究では、触覚警告はブレーキ応答時間を短縮することによってドライバーに利益をもたらすことが示されました。また、触覚警報システムは、特定の状況で視覚10、11および聴覚12、13、14の警告システムよりもより効果的な結果をもたらすことも判明した。しかし、限られた研究は、触覚警告装置を配置するための最適な場所を調査することに焦点を当てています。感覚皮質仮説15と感覚距離仮説16によると、例示的研究は触覚警告装置を配置するための実験場所として指、手首、および寺院領域を選択した。導入されたプロトコルにより、振動警告の周波数および送達時間、および振動ツールキットの振動間の間隔を、実験要件に合わせて構成することができる。この振動ツールキットは、マスターチップ、電圧レギュレータチップ、マルチプレクサ、USB-トランジスタ-トランジスタロジック(TTL)アダプタ、金属酸化物半導体電界効果トランジスタ(MOSFET)、およびBluetoothモジュールで構成されていました。振動モジュールの数は研究者のニーズに応じて異なり、最大4つのモジュールが同時に振動します。駆動関連実験に振動ツールキットを実装する場合、駆動シミュレーションのコードを改訂することにより、実験設定に適合するとともに、運転性能データと同期するように構成することができる。
研究者にとっては、仮想プラットフォームで運転実験を行うことは、リスクとコストが伴うため、現実の世界よりも実現可能です。たとえば、パフォーマンス指標の収集は困難であり、実際の世界で実験を行っている場合に関連する環境要因を制御することは困難です。その結果、近年、多くの研究では、オンロード走行研究を行うための代替手段として、PC上で実行されている固定ベースのドライビングシミュレータを使用しています。11年以上にわたり、運転研究コミュニティで学習、開発、研究を行った後、オープンソースのドライビングシミュレーションソフトウェアと、ステアリングホイールとギアボックス、3台のペダル、3台の搭載プロジェクター、3つのプロジェクタースクリーンなど、ハードウェアキットで構成された実車で運転シミュレーションプラットフォームを確立しました。ドライビングシミュレーションソフトウェアは単一の画面のみをサポートしており、提示されたプロトコルは中央プロジェクターとプロジェクタ画面のみを使用して実験を行いました。
提示された運転シミュレーションプラットフォームを使用する2つの大きな利点があります。このプラットフォームの利点の 1 つは、オープンソース ソフトウェアを使用することです。研究者は、使いやすいオープンソースプラットフォームを使用して、コード開発なしで簡単なソフトウェア構成を行うことで、独自の研究ニーズに合わせてシミュレーションと振動ツールキットをカスタマイズできます。コードを改訂することで、研究者は、車の種類、道路の種類、ステアリングホイールの抵抗、横方向および縦方向の風の乱流、外部ソフトウェア同期のための時間およびブレーキイベントアプリケーションプログラムインターフェイス(API)、および自動車フォロータスクやNバックタスクなどの行動パラダイムの実装に利用可能な多くのオプションを備えた、現実に相対的な忠実度を提供する運転シミュレーションを作成することができます。運転シミュレータで運転関連の研究を行うことは現実の世界での運転を完全に再現することはできませんが、運転シミュレータを通して収集されたデータは合理的であり、研究者17,18に広く採用されています。
提案されたドライビングシミュレータのもう一つの利点は、その低コストです。前述のように、導入されたドライビングシミュレーションソフトウェアは、ユーザーが無料で利用できるオープンソースソフトウェアです。さらに、このプロトコルでのハードウェア全体のセットアップの総コストは、典型的な高忠実度の商用ドライビングシミュレータと比較して低くなります。図 1 a と b は、3000 ドルから 30000 ドルまでのコストで 2 つのドライビング シミュレータの完全なセットアップを示しています。対照的に、典型的な高忠実度の商業運転シミュレータ(固定ベース)は、通常約$ 10,000から$100,000の費用がかかります。その非常に手頃な価格で、このドライビングシミュレータは、学術研究の目的だけでなく、運転クラス19を実施し、運転関連技術20、21のデモンストレーションのために人気のある選択肢になることができます。

図1:運転シミュレータの画像。両方のドライビングシミュレータは、ステアリングホイールとギアボックス、3つのペダル、および車両で構成されていました。(a) 解像度が 3840 × 2160 の 80 インチ LCD スクリーンを使用した 3000 ドルのドライビング シミュレータ セットアップ。(b) 30000ドルのドライビングシミュレータセットアップで、3台の搭載プロジェクターと3つのプロジェクタースクリーンをそれぞれ223 x 126 cmの寸法で使用しました。投影スクリーンは地上60cm、車両前部から22cm離れた場所に設置した。現在の実験には、中央のプロジェクターとプロジェクター画面のみが使用されました。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
提案された方法における駆動シミュレーションソフトウェアと振動ツールキットは、我々の研究者22、23、24、25、26、27、28、29によって以前の研究ですでに使用されています。ISO規格30に準拠したこの自己開発振動ツールキットは、振動周波数と強度を調整することにより、異なるフィールド31、32に適用することができる。振動ツールキットの新しいバージョンが開発され、次のプロトコルで導入されることに注意することが重要です。調整可能な電圧アダプタを使用して振動周波数を調整する代わりに、新しいバージョンには5つの異なる振動周波数が装備されており、補足符号化ファイル1に記載されているコードを使用して簡単に調整できます。また、本発表のドライビングシミュレータは、安全で安価で効果的な方法で、さまざまな運転関連の研究を研究します。したがって、このプロトコルは、限られた予算を持ち、実験運転環境をカスタマイズする強い必要性を持っている研究所に適しています。
プロトコル
注:ここで説明するすべての方法は、清華大学の機関審査委員会(IRB)によって承認されており、インフォームド・コンセントはすべての参加者から得られました。
1. 参加者
- 統計的な力を達成するために、実験計画に従って募集に必要な参加者数を計算するために、電力分析を実施します。
- 募集期間中の参加者の性別のバランスを可能な限り調整する。
- 参加者が有効な運転免許証と少なくとも1年間の運転経験を持っていることを確認してください。
- 参加者が視力チャートを使用して正常な視力を持っているか、正常な視力に修正されていることを確認します。
- 実験33の前に、参加者が24時間以内に運転能力に影響を与えるアルコールや薬物を消費していないことを確認してください。
2. シミュレーションソフトウェア構成の駆動
- 運転シミュレーションソフトウェアのフォルダを入力し、その後に Runtime フォルダと Config フォルダを入力します。次に、"expconfig.txt"ファイルを開きます(つまり、ファイルパスは"\torcs-1.3.3-Exp-2018-20-20-25\torcs-1.3.3\nuntime\config\"でなければなりません)。
- 実験計画を参照して、構成を適用するか、既定の設定を使用して、既定の設定を使用して、運転シミュレーションを続行するかを決定します。 表 1 は、使用可能なすべてのオプションのデフォルト構成の詳細な説明を示しています。
- 変更が行われなければ、プロトコルのセクション 3 に進みます。
| 構成可能なオプション | 説明 | デフォルト設定 |
| エンデエクスビタイム | 実験を終了するトリガとしてクロックタイムを使用するかどうか。 | False |
| 終了後のミニット | この数分後に実験を終了します。 | 10 |
| エンドエエクスビスト | 運転者の車を使用するかどうかは、実験を終了するためのトリガーとして距離を移動しました。時間と距離の両方のトリガーを使用する場合は、最初に実行する 1 つで実験を終了します。 | False |
| エンデエクストアフターメーター | これらのメーターがスタートラインから移動した後に実験を終了します。 | 5000 |
| 有効ランダムフロントアルウィンド | フロント風を有効にするかどうか(すなわち、車を後方向に押し上げる力)をランダムな間隔と持続時間で行います。 | True |
| 前頭風間隔分ミン | フロント風間隔の最小値 (秒)。 | 3 |
| フロントルウィンドインターバルマックス | 正面風の最大の値 (秒) です。 | 13 |
| フロントルウィンドデュレーションミン | フロント風の持続時間の最小値 (秒)。 | 2 |
| フロントルウィンドデュレーションマックス | 正面風の持続時間の最大値 (秒) です。 | 3 |
| フロントルウィンドフォースミン | 前線風の力の最小値(ニュートン)。 | 500 |
| フロントルウィンドフォースマックス | 正面風の最大値(ニュートン) | 1000 |
| 有効ランダムな横風 | ランダムな間隔と持続時間で横風(すなわち、車を左右方向に押し上げる力)を有効にするかどうか。 | True |
| 横風間隔分ミン | 横風間隔の最小値 (秒) です。 | 3 |
| 横風間隔最大 | 横風間隔の最大値 (秒) です。 | 8 |
| 横風期間分 | 横風の持続時間の最小値 (秒) です。 | 2 |
| 横風時間最大 | 横風の持続時間の最大値 (秒) です。 | 3 |
| 横風機ミン | 横風の最小値 (ニュートン) です。 | 1000 |
| 横風機マックス | 横風の最大値(ニュートン) | 2000 |
| リードカーコンスタントスピードMPH | リード車両の一定速度(mph)。 | 40 |
| 待っている間に至る | 先頭車両の車尾とドライバーの頭の距離(メートル)が指定された数より大きい場合、先頭車両は運転者の車両を待ち始めます。 | 100 |
| 待っている間に至る | 先頭車は、運転者の車の前の距離(メートル)がこの数よりも小さくなるまで待ちます。 | 80 |
| リードカーブレーキインターバルタイムミン | リード車両がブレーキを掛ける最小ランダム時間間隔(秒)。 | 30 |
| リードカーブレーキインターバルタイムマックス | リード車両がブレーキを掛ける最大ランダム時間間隔(秒)。 | 60 |
| リードカーブレーキイベント期間 | リード車両ブレーキイベントの継続時間(秒)。 | 5 |
| 有効にするランダムなSMSサウンド | ランダムな間隔で再生されるショートメッセージサーバー通知音を有効にするかどうか。 | False |
| ランドSMSインターバルミン | 最初の SMS 通知の始まりから 2 番目の SMS 通知の始まりまでの最小ランダム時間間隔 (秒)。 | 2 |
| ランド SMS インターバル最大 | 最初の SMS 通知の始まりから 2 番目の SMS 通知の始まりまでの最大ランダム時間間隔 (秒)。 | 2 |
| 有効にするランダムなNbackサウンド | ランダムな間隔で再生される N バック番号のサウンドを有効にするかどうか。 | False |
| ランドンバックインターバルミン | 最初のサウンドの始まりから第2音の始まりまでの最小ランダム時間間隔(秒)。 | 2.33 |
| ランドナンバックインターバルマックス | 最初のサウンドの始まりから第2音の始まりまでの最大ランダム時間間隔(秒)。 | 2.33 |
| データを有効にします。 | 特定のローカル ネットワーク IP に対してタイム スタンプ データの同期を有効にするかどうか。 | False |
| 有効にします。 | 広告調査のために、次の IP にデータを送信できるようにするかどうかを指定します。 注: 有効な UDPSend データとの競合。 | False |
| 191 | UDP 転送の IP アドレス | / |
| 2012 | ||
| ターゲットIPa3 | ||
| ターゲットIPa4 | ||
| ポート | ターゲット UDP ポート。 | 1234 |
| ウップサイクルナンバー | タイム スタンプの送信頻度を制御します。データは、各サイクルでのTORCSサイクルの各UDPcycle番号が通常20ミリ秒後に送信されます。 | 1 |
| 有効にするUDPQN接続 | UDP サーバとクライアントでの QN-Java モデル ドライブ シミュレーションを有効にするかどうかは、同じコンピュータです。 | False |
| ポート | シミュレーション ポート番号への UDP QN ポート。 | 5678 |
| ポート | シミュレーション ポートから UDP QN ポート番号。 | 8765 |
| リードカーブレイキングバイウェブコマンド | リード車両のブレーキ信号のウェブサイトに接続するかどうか。 | False |
| Far_Point_Time_Ahead | 車両制御モデルで使用されるパラメータ。 | 2 |
| 有効にカーフォロートレーニング | トレーニングモードでシミュレートされた車のフォロータスクを有効にするかどうか。 | / |
| カーフォロートレーニング警告間隔 | 最後の警告音の発症から、トレーニングモードの次の警告音の発症までの時間間隔。 | 2 |
表1:走行シミュレーションソフトウェアのデフォルト設定のリスト 各オプションの詳細な説明と共に、駆動シミュレーションソフトウェアの関連付けられたすべての設定可能オプションのデフォルト値のリスト。
- 実験計画の決定された制御変数に基づいて実験を終了する方法の設定を構成します。
- オプションの選択肢として True または False を使用して、"endExpByTime =" オプションを使用して実験を終了するトリガーとしてクロック時間を使用するかどうかを決定します。このオプションを False に設定すると、例示的なスタディが複製されます。
- 小数点以下 1 桁の形式で分数を入力して、トリガーとして移動した時間をトリガーとして終了するかどうかを選択します。移動した時間は、研究者によって完全に決定することができます。 12 を入力して、模範的な研究を複製する。
- オプションの選択肢として True または False を使用して、トリガーとして移動距離を使用して実験を終了するかどうかを設定します。"endExpByTime =" と "endExpByDist =" の両方のオプションが True に設定されている場合、実験は最初に満たされた条件で終了することに注意してください。このオプションを True に設定すると、例示的なスタディが複製されます。
- 「endExpAfterMeter =」オプションを使用して、1桁の小数点以下の形式でメートル単位で開始線から移動する距離を設定します。移動距離は、研究者によって完全に決定することができます。 10000.0 を入力して、模範的なスタディを複製します。
- 仮想環境用に設計された風速34、35、および実験に開始される認知負荷36に従って、シミュレートされた運転環境の風の設定を構成する。
- オプションの選択肢として True または False を使用して、「enableRandomFrontalWind =」オプションを使用して、ランダムな間隔と持続時間で正面風を有効にするかどうかを設定します。このオプションを True に設定すると、例示的なスタディが複製されます。
- 「フロント風間隔 =」および「前頭風間隔=」オプションを使用して、最小および最大正面風の間隔を定義します。既定の設定 (例示的なスタディを複製するには、それぞれ 3.0 と 13.0) を使用します。
- 「フロント風速持続時間 =」および「前頭風時間マックス =」オプションを使用して、最小および最大正面風のデュレーションを定義します。既定の設定 (例示的なスタディを複製するには、それぞれ 2.0 と 3.0) を使用します。
- ニュートンの力の量をそれぞれ指定して、"前頭風力="と"前頭風の力="オプションを使用して、最小および最大正面風の力を定義します。既定の設定 (例えば、それぞれ 500.0 と 1,000.0) を使用して、模範的なスタディを複製します。
- オプションの選択肢として True または False を使用して、ランダムな間隔と継続時間を持つ横風を有効にするかどうかを選択します。 [True] に設定すると、例示的なスタディが複製されます。
- 「横風間隔Min =」および「横方向のWindIntervalMax =」オプションを使用して、最小および最大横風速間隔を定義します。既定の設定 (例示的なスタディを複製するには、それぞれ 3.0 と 8.0) を使用します。
- 「横風継続時間 =」および「横風継続時間 =」オプションを使用して、最小および最大横風のデュレーションを定義します。既定の設定 (例示的なスタディを複製するには、それぞれ 2.0 と 3.0) を使用します。
- 「横風強」と「横風強マックス=」オプションを使用して、最小および最大の横方向の風力を定義するには、それぞれニュートンの力の量を指定します。既定の設定 (例示的なスタディを複製するには、それぞれ 1,000.0 と 2,000.0) を使用します。
- 実験計画に従ってシミュレートされた車のフォロータスクの設定を構成し、35を必要とする。
- 「leadCarConstantSpeedMPH =」オプションを使用して、1桁の小数点以下の速度で、リード車両の一定速度を時速マイルで設定します。例示的な研究を複製するために 40 を入力する。
- リード車両とドライバーの車両の間の小数点以下1桁の距離をメートル単位で定義し、リード車両が運転車両が追いつくのを待ち始めるか、運転を再開するかをそれぞれ「leadDistToStartWaiting=」オプションで定義します。既定の設定 (例示の調査を複製するには、それぞれ 100.0 と 80.0) を使用します。
- 1 桁 (例: 30.0 と 60.0) の形式で秒数を入力して、リード車両のブレーキイベントの最大および最小のランダム時間間隔を設定します。既定の設定 (例えば、それぞれ 30.0 と 60.0) を使用して、例示的なスタディを複製します。
- 1 桁の小数点以下の形式で秒数を入力して、ブレーキ イベントの期間を "leadCarBrakeEventDuration =" オプションで定義します。既定の設定 (5.0) を使用して、例示的なスタディを複製します。
- 実験の設計とニーズに応じてランダムな短いメッセージ通知音の設定を構成します。
- ショート メッセージ サービス (SMS) 通知音を有効にするかどうかを決定するかどうか、"enableRandomSMSSound =" オプションのオプションの選択として True または False のランダムな間隔で再生します。このオプションを False に設定すると、例示的なスタディが複製されます。
- 最初の SMS 通知の始まりから 2 番目の SMS 通知の始まりまでの最小時間間隔と最大時間間隔を、それぞれ 1 桁の 1 桁 (例えば 5.0、 10.0) の形式で示すことによって、"randSMSIntervalMin =" および "randSMSIntervalMax =" オプションを使用して、2 番目の SMS 通知の始まりまでの最小時間間隔を定義します。
- 実験計画および必要性に従って、シミュレートされたNバックタスク37 の設定を構成する。
- "enableRandomNbackSound =" オプションのオプションの選択として、N バック番号のサウンドを True または False でランダムな間隔で再生するように設定します。このオプションを False に設定すると、例示的なスタディが複製されます。
- 1 つ目のサウンドのオフセットから 2 番目のサウンドの始まりまでの最小時間間隔と最大時間間隔を、それぞれ 1 桁の 1 桁 (例えば 5.0、10.0) の形式で示すオプションとして "randNbackIntervalMin =" および "randNbackIntervalMax =" を使用して定義します。
- 実験に UDP データ転送が必要な場合は、ユーザー データグラム プロトコル (UDP) の設定を構成します。
- オプションの選択肢として True または False を使用して、特定のローカル ネットワーク IP アドレスにタイム スタンプ データの同期を許可して、データ転送に UDP を有効にするかどうかを決定します。このオプションを有効にすると、例示的なスタディを複製できます。
- オプションの選択肢として True または False を使用して、広告調査の特定の IP アドレスに UDP を有効にするかどうかを選択します。また、このオプションは"enableUDPSendData =" と競合しており、両方のオプションを同時に True に設定することはできません。このオプションを False に設定すると、例示的なスタディが複製されます。
- 「UDPTargetIPa1 =」、「UDPTargetIPa2 =」、「UDPTargetIPa3 =」、「UDPTargetIPa4 =」を使用して、IPアドレスの各セクションを指定して、UDP転送のIPアドレスを定義します。
- 「UDP ターゲット ポート =」の下にターゲット のポート番号を指定します。
- 送信するデータの頻度を"UDPcycleNumber="の下で設定し、各サイクルが 20 ミリ秒である「1」サイクル以上の整数を使用します。
- 実験設計とニーズを参照して、UDP キューイング ネットワーク (QN) モデル38 接続を構成します。
- オプションの選択として True または False を使用して、UDP サーバーとクライアントが同じコンピューターを共有している QN-Java モデル・ドライブ・シミュレーションを使用可能にするかどうかを設定します。このオプションを無効にすると、一見スタディを複製できます。
- UDP QN ポートからシミュレーション ポートへの番号を"UDPQNtoTORCSPort =" オプションの下に示します。
- 「UDPTORCStoQNPort =」オプションの下で、シミュレーションポートからUDP QNポートまでの番号を指定します。
- オプションの選択肢としてTrueまたはFalseを使用して、「leadCarBrakingByWebCommand =」オプションの下で実験計画に従ってブレーキ信号のウェブサイトに接続するかどうかを設定します。このオプションが True に設定されている場合は、"endExpByTime =" と "endExpAfterMinute =" が動作しなくなります。このオプションを False に設定すると、例示的なスタディが複製されます。
- オプションの選択肢として True または False を使用して、トレーニング モードでシミュレートされた車のフォロー タスクを有効にするかどうかを設定します。
- 最後の警告音の発症から「carFromTrainingWarningInterval =」オプションを使用して、トレーニングの次の警告音の発症までの間隔を、小数点以下1桁の秒数(例えば2.0)で指定して定義します。
- 構成が完了した時点でファイルを保存します。
3. ドライビングシミュレーターの準備
- ステアリングホイールと中央プロジェクタ(アスペクト比16:10、192~ 240 Hzリフレッシュ周波数、8ビットカラー処理)をコンピュータに接続します。223 x 126 cmの寸法のプロジェクタースクリーンを地上60cm、計装車両の正面から22cm離れた場所に設置しました。
- [オプション] |で画面の解像度 を設定します。運転シミュレーションソフトを起動したときの画面サイズに合わせて表示します。
- [ 構成] ページに入ってプレーヤーを選択し、ソフトウェアの指示に従ってハンドル、アクセル、ブレーキ ペダルを調整します。ステアリングホイールを回し、指示に従ってアクセルとブレーキペダルを押す。
4. 振動ツールキットの構成と準備
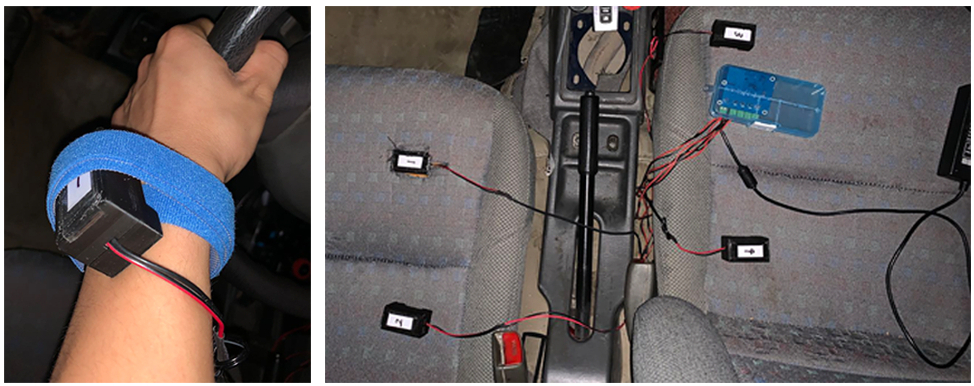
- 振動ツールキットを電源に接続します。4 つのモジュールの寸法は 67 x 57 x 29 mmです。

図2:振動ツールキットの画像。振動ツールキットは、別々に活性化することができる4つの個別のモジュールで構成されていました。各モジュールの寸法は67 x 57 x 29 mmです。
{kind=link}
- 振動ツールキットの電源を入れ、ツールキットをBluetooth経由でコンピュータに接続します。
- 試験的皮膚感度試験の完了時、または実験のニーズに応じて実験に使用する振動周波数を定義します。
- 補足符号化ファイル 1として提供されるコードを使用して、振動周波数を 70 Hz39、40、41に設定します。現在、0.5 sの周波数刺激で、合計5つの周波数レベル(すなわち、14Hz、28Hz、42Hz、56Hz、70Hz)が利用可能です。
- 補足符号化ファイル 1として提供されるコードを使用して、運転シミュレーションソフトウェアと振動ツールキットからブレーキ イベントを同期させます。図 3は、参照として改訂されるコードのラベル付きスクリーンショットを示しています。

図 3: 補足コーディング ファイル 1 のコードのラベル付きスクリーンショット。ラベル付きのコードのスクリーンショットは、振動ツールキットの構成と準備の簡単なリファレンスとして使用できます。これらのコードは、ツールキットの振動周波数を設定し、運転シミュレーションソフトウェアと振動ツールキットでブレーキイベントを同期させて振動警告を生成するために使用されます。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
5. 実験の実施
- 実験プロセスを紹介するインフォームドインドコンセントフォームを読んで署名し、研究室に到着したときに運転性能を評価することを宣言するよう参加者に指示します。
- 参加者がペダルまでの座席距離を調整し、バックレストを手動で快適な位置に設定するのを助けます。
- ステアリングホイール、ブレーキペダル、アクセルペダルなど、シミュレータの操作方法を参加者に教えます。
- 参加者は、目の前の車を追い、その後ろに2秒の前進を保ちながら、現実の世界と同じように運転するように指示します。 図 4 は、運転シミュレーションに使用される道路地図を示しています。

図4:運転シミュレーションに使用するロードマップ。使用道路は、4つの曲線(最大長15,000メートル)、3車線、信号機のない一方通行道路です。ドライビングシミュレータソフトウェアは、道路標識や看板を含めるオプションなど、他の道路設計オプションを提供しています。EEG互換バージョンもご用意しております。これらのパラメータはすべて、必要に応じて調整できます。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- シナリオにブレーキ応答が必要ない場合でも、フロント車両がブレーキをかけるたびにできるだけ早くブレーキをかけます。前部車両のテールライトは、ブレーキイベントを示すために実際の運転に従って点灯します。
- 参加者に5分の練習トライアルを提供し、前車両の後ろに2秒のヘッドウェイ距離を維持することを学びます。練習トライアルには、5つのランダムブレーキのセットが含まれています。
- 練習試行中、前車両の後ろに1.5s未満の場合、運転シミュレーションソフトは「近すぎる、ゆっくりしてください」という女性の声でプロンプトを再生します。
- 参加者が前車の後ろに2.25~2.5sの間にある場合、運転シミュレーションソフトは「遠すぎる、スピードアップしてください」という女性の声でプロンプトを再生します。
- 分析のための実用試験のデータを含めないでください。
- 必要に応じていつでも実験者に通知することで、ペナルティなしで研究を停止できることを参加者に知らせます。
- 参加者が練習を終え、安定した次の距離を維持できたら、正式な実験を開始します。
- 各ブロックに13のランダムブレーキイベントを含む合計4つのブロック(指、手首、寺院、運転のみ)で構成される正式な実験セッションを開始し、合計52の実験試験を行います。条件の順序は、ラテン語の正方形のデザインと相殺されます。正式な試行では音声プロンプトは提供されません。
- 割り当てられた条件に従って、試験の各ブロックの前に医療テープを使用して振動ツールキットを装着するのを支援します。振動ツールキット(装着されている場合)は、前部車両がブレーキをかけているときに参加者にブレーキをかける警告を出します。前部車両のテールライトは、前車両がブレーキをかけるたびに点灯します。
- 参加者が持ち越しの効果を減らすために、各ブロックの完了時に2分の休息を与えられることを確認してください。
- すべての試験が完了すると、振動ツールキットの好ましい位置と7ポイントのLikertスケールで知覚された振動強度を参加者に尋ねます。毎日のウェアラブルアクセサリー(時計、眼鏡、イヤホン、リングなど)の利用率も記録されています。振動ツールキットの位置の好みのスケールでは、「1」は「最も好きな」を表し、「7」は「最も好み」を表し、振動強度スケールでは「弱い感じ」を表し、「7」は「強い感じ」を表す。
6. データ分析
- ブレーキの応答時間、車速、ハンドル反転率、車線位置(SDLP)、およびヘッドウェイ距離など、運転シミュレーションソフトウェアを使用して50Hzで参加者の運転行動データを収集します。
- ドライバのパフォーマンスのデータ分析を実行します。
- カットオフを 3 つの 標準偏差としてカットオフして正規分布を使用して外れ値分析を実行し、さらに分析に含めるデータを決定します。
- 前車両がブレーキを開始した時点から、参加者車両がブレーキをかける時間(すなわち、ブレーキペダル36、42の1%の最小削減)を差し引いてブレーキ応答時間を算出する。
- ブレーキの応答時間が5s以上の場合(すなわち、前部車両ブレーキ後に5s以内にブレーキをかけなかった場合)、データに「ブレーキ応答なし」とラベルを付けます。
- ブレーキの成功数を前部車両が実行するブレーキの総数で割ってブレーキ応答率を計算します。
- 各参加者のすべての値を平均化して、各条件の平均ブレーキ応答率とブレーキ応答時間を取得し、その値の標準偏差を計算して、さらなる分析を行います。
結果
この論文で報告された模範的な研究は、以前に学術雑誌22に掲載されたドライビングシミュレータと振動ツールキットを使用して車に続くタスクを実施しました。振動ツールキットの古いバージョンは、模範的な研究を行うときに使用され、振動ツールキットの新しいバージョンは、上記のプロトコルで導入されたのは注目に値します。この研究は、指、手首、寺院の警告?...
ディスカッション
ドライビングシミュレーションプラットフォームと振動ツールキットは、実際の生活の中で潜在的なウェアラブルvibrotactileデバイスのアプリケーションを合理的に模倣し、運転関連の研究を調査する上で効果的な技術を提供しました。この技術を使用すると、高い構成性と手頃な価格の安全な実験環境が、現実世界の運転に匹敵する研究を行うことができます。
より注?...
開示事項
著者らは、財務上の開示や利益相反を宣言しなかった。
謝辞
このプロジェクトは北京人材財団が主催しています。
資料
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
参考文献
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved