
È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Toolkit vibrante tattile e piattaforma di simulazione di guida per la ricerca relativa alla guida
In questo articolo
Erratum Notice
Riepilogo
Questo protocollo descrive una piattaforma di simulazione di guida e un toolkit vibrante tattile per l'indagine sulla ricerca relativa alla guida. Viene inoltre presentato un esperimento esemplare che esplora l'efficacia delle avvertenze tattili.
Abstract
Il sistema di avviso di collisione svolge un ruolo chiave nella prevenzione delle distrazioni di guida e della guida sonnolenta. Studi precedenti hanno dimostrato i vantaggi delle avvertenze tattili nel ridurre il tempo di risposta del freno del conducente. Allo stesso tempo, le avvertenze tattili si sono dimostrate efficaci nella richiesta di troppo (RPT) per i veicoli parzialmente autonomi.
Come ottimizzare le prestazioni degli avvisi tattili è un argomento di ricerca hot in corso in questo campo. Pertanto, vengono introdotti il software e i metodi di simulazione di guida a basso costo presentati per attirare un maggior numero di ricercatori a partecipare all'indagine. Il protocollo presentato è stato diviso in cinque sezioni: 1) partecipanti, 2) configurazione del software di simulazione di guida, 3) preparazione del simulatore di guida, 4) configurazione e preparazione del toolkit vibrante e 5) conduzione dell'esperimento.
Nello studio esemplare, i partecipanti hanno indossato il toolkit vibrante tattile ed eseguito un compito consolidato di seguire l'auto utilizzando il software di simulazione di guida personalizzato. Il veicolo anteriore ha frenato a intermittenza e gli avvisi vibranti sono stati consegnati ogni volta che il veicolo anteriore stava frenando. I partecipanti sono stati incaricati di rispondere il più rapidamente possibile agli improvvisi freni del veicolo anteriore. La dinamica di guida, come il tempo di risposta dei freni e la velocità di risposta dei freni, sono state registrate dal software di simulazione per l'analisi dei dati.
Il protocollo presentato offre informazioni sull'esplorazione dell'efficacia delle avvertenze tattili su diverse posizioni del corpo. Oltre all'attività di car-following che viene dimostrata nell'esperimento esemplare, questo protocollo fornisce anche opzioni per applicare altri paradigmi agli studi di simulazione di guida effettuando una semplice configurazione software senza alcuno sviluppo di codice. Tuttavia, è importante notare che a causa del suo prezzo accessibile, il software di simulazione di guida e l'hardware introdotti qui potrebbero non essere in grado di competere pienamente con altri simulatori di guida commerciale ad alta fedeltà. Tuttavia, questo protocollo può fungere da alternativa economica e intuitiva ai simulatori di guida commerciale ad alta fedeltà generali.
Introduzione
Secondo i dati rivelati dal Global Health Estimates nel 2016, l'infortunio al codice della strada è l'ottava causa di morti globali, con 1,4 milioni di morti in tuttoil mondo 1. Nel 2018, il 39,2% degli incidenti stradali sono stati collisioni con veicoli a motore nel settore dei trasporti e il 7,2% sono stati collisioni posteriori. Una soluzione per aumentare la sicurezza dei veicoli e della strada è lo sviluppo di un sistema avanzato di assistenza alla guida (ADAS) per avvertire i conducenti con potenziali pericoli. I dati hanno dimostrato che ADAS può ridurre notevolmente il tasso di collisioni posteriori ed è ancora più efficace se dotato di un sistema di frenata automatica2. Inoltre, con lo sviluppo di veicoli autonomi, sarà richiesto un minore coinvolgimento umano per controllare il veicolo, rendendo necessario un sistema di richiesta di partecipazione (TOR) quando il veicolo autonomo non riesce a regolarsi da solo. La progettazione del sistema di allarme ADAS e TOR è ora un'importante tecnologia per i conducenti per evitare incidenti imminenti in pochi secondi. L'esperimento esemplare ha utilizzato un toolkit vibrante insieme a una piattaforma di simulazione di guida per indagare quale posizione genererebbe il miglior risultato quando un sistema di avvertimento vibrotattile è stato utilizzato come potenziale sistema di avvertimento ADAS e TOR.
Categorizzati per canali percettivi, esistono generalmente tre tipi di modalità di avviso, o cioè visive, udibili e tattili. Ogni modalità di avvertimento ha i suoi meriti e limiti. Quando sono in uso sistemi di allarme visivo, i conducenti possono soffrire di sovraccaricovisivo 3,compromettendo le prestazioni di guida a causa della cecità disattenta4,5. Sebbene un sistema di avviso uditivo non influenzi il campo visivo dei conducenti, la sua efficacia dipende notevolmente dall'ambiente circostante come musica di sottofondo e altri rumorinell'ambiente di guida 6,7. Pertanto, situazioni che contengono altre informazioni uditivo esterne o rumore significativo possono portare a sordità disattenta8,9, riducendo l'efficacia di un sistema di avviso uditivo. In confronto, i sistemi di avvertimento tattili non competono con l'elaborazione visiva o uditivo dei conducenti. Inviando avvisi vibrotattili ai conducenti, i sistemi di allarme tattile superano i limiti dei sistemi di allarme visivi e uditivi.
Studi precedenti hanno dimostrato che le avvertenze tattili possono avvantaggiare i conducenti abbreviando i tempi di risposta dei freni. Si è inoltre constatato che i sistemi di allarme tattile danno un risultato più efficace rispetto ai sistemi di allarme visivi10,11 e uditivi 12,13,14 in determinate situazioni. Tuttavia, una ricerca limitata si è concentrata sullo studio della posizione ottimale per posizionare un dispositivo di avviso tattile. Secondo l'ipotesi della corteccia sensoriale15 e l'ipotesi della distanza sensoriale16, lo studio esemplare ha scelto le aree del dito, del polso e della tempia come luoghi sperimentali per posizionare un dispositivo di avvertimento tattile. Con il protocollo introdotto, la frequenza e il tempo di consegna di un avviso vibrante, e gli intervalli tra le vibrazioni del toolkit vibrante, possono essere configurati per soddisfare i requisiti sperimentali. Questo toolkit vibrante consisteva in un chip master, un chip regolatore di tensione, un multiplexer, un adattatore DA USB a Transistor-Transistor-Logic (TTL), un transistor MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor) e un modulo Bluetooth. Il numero di moduli vibranti può anche variare in base alle esigenze dei ricercatori, con un massimo di quattro moduli che vibrano contemporaneamente. Quando si implementa il toolkit vibrante negli esperimenti relativi alla guida, può essere configurato per adattarsi alle impostazioni sperimentali e sincronizzato con i dati sulle prestazioni di guida rivedendo i codici della simulazione di guida.
Mentre per i ricercatori, condurre un esperimento di guida su una piattaforma virtuale è più fattibile che nel mondo reale a causa del rischio e dei costi coinvolti. Ad esempio, la raccolta di indicatori di prestazione può essere difficile ed è difficile controllare i fattori ambientali coinvolti quando vengono condotti esperimenti nel mondo reale. Di conseguenza, molti studi hanno utilizzato simulatori di guida a base fissa in esecuzione su PC negli ultimi anni come alternativa allo svolgimento di studi di guida su strada. Dopo aver appreso, sviluppato e ricercato per oltre 11 anni nella comunità di ricerca sulla guida, abbiamo creato una piattaforma di simulazione di guida con una vera auto che consiste in un software di simulazione di guida open source e un kit hardware, tra cui volante e cambio, tre pedali, tre proiettori montati e tre schermi del proiettore. Con il software di simulazione di guida supporta un solo schermo, il protocollo presentato utilizzava solo il proiettore centrale e lo schermo del proiettore per condurre l'esperimento.
Ci sono due vantaggi principali nell'utilizzo della piattaforma di simulazione di guida presentata. Un vantaggio di questa piattaforma è che utilizza un software open source. Utilizzando la piattaforma open source intuitiva, i ricercatori possono personalizzare il toolkit di simulazione e vibrazione per le loro esigenze di ricerca uniche rendendo semplice la configurazione del software senza alcuno sviluppo di codice . Rivedendo i codici, i ricercatori possono creare simulazioni di guida che forniscono relativa fedeltà alla realtà con molte opzioni disponibili su tipi di auto, tipi di strada, resistenza del volante, turbolenza del vento laterale e longitudinale, interfacce del programma di applicazione di eventi di tempo e freno (API) per la sincronizzazione del software esterno e implementazione dei paradigmi comportamentali come il compito di seguire l'auto e il compito N-Back. Sebbene condurre ricerche relative alla guida in un simulatore di guida non possa replicare completamente la guida nel mondo reale, i dati raccolti attraverso un simulatore di guida sono ragionevoli ed è stato ampiamenteadottato dai ricercatori 17,18.
Un altro vantaggio del simulatore di guida proposto è il suo basso costo. Come accennato in precedenza, il software di simulazione di guida introdotto è un software open source disponibile gratuitamente per gli utenti. Inoltre, il costo totale dell'intera configurazione hardware in questo protocollo è inferiore rispetto ai tipici simulatori di guida commerciale ad alta fedeltà. La figura 1 a e b mostra la configurazione completa di due simulatori di guida con un costo che va da $ 3000 a $ 30000. Al contrario, i tipici simulatori di guida commerciale ad alta fedeltà (base fissa) di solito costano da $ 10,000 a $ 100,000. Con il suo prezzo altamente conveniente, questo simulatore di guida può essere una scelta popolare non solo per scopi di ricerca accademica, ma anche per condurrelezioni di guida 19 e per la dimostrazione di tecnologie legate allaguida 20,21.

Figura 1: Immagine dei simulatori di guida. Entrambi i simulatori di guida consistevano in un volante e un cambio, tre pedali e un veicolo. (a) Una configurazione del simulatore di guida da $ 3000 che utilizzava uno schermo LCD da 80 pollici con una risoluzione di 3840 × 2160. (b) Una configurazione del simulatore di guida da $ 30000 che utilizzava tre proiettori montati e tre schermi di proiettori con una dimensione di 223 x 126 cm ciascuno. Gli schermi di proiezione sono stati posizionati a 60 cm dal suolo e a 22 cm di distanza dalla parte anteriore del veicolo. Solo il proiettore centrale e lo schermo del proiettore sono stati utilizzati per l'esperimento corrente. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
Il software di simulazione di guida e il toolkit vibrante nel metodo proposto sono già stati utilizzati in precedenti studi dai nostriricercatori 22,23,24,25,26,27,28,29. Questo toolkit vibrante auto-sviluppato seguendo lo standard ISO30 può essere applicato in diversicampi 31,32 regolando la frequenza e l'intensità delle vibrazioni. È importante notare che è stata sviluppata una versione più recente del toolkit vibrante che viene introdotta nel seguente protocollo. Invece di regolare la frequenza delle vibrazioni utilizzando un adattatore di tensione regolabile, la versione più recente è dotata di cinque diverse frequenze di vibrazione e può essere regolata più facilmente utilizzando i codici forniti nel file di codifica supplementare 1. Inoltre, il simulatore di guida presentato fornisce ai ricercatori un modo sicuro, economico ed efficace per indagare vari tipi di ricerca relativa alla guida. Pertanto, questo protocollo è adatto a laboratori di ricerca che hanno un budget limitato e hanno una forte necessità di personalizzare gli ambienti di guida sperimentali.
Protocollo
NOTA: Tutti i metodi qui descritti sono stati approvati dall'Institutional Review Board (IRB) dell'Università Tsinghua e il consenso informato è stato ottenuto da tutti i partecipanti.
1. Partecipanti
- Condurre un'analisi della potenza per calcolare il numero richiesto di partecipanti per il reclutamento secondo il progetto sperimentale per ottenere potenza statistica.
- Bilanciare il più possibile il sesso dei partecipanti durante il reclutamento.
- Assicurati che i partecipanti abbiano una patente di guida valida e almeno un anno di esperienza di guida.
- Assicurarsi che i partecipanti abbiano una visione normale o corretta alla visione normale utilizzando il grafico della visione.
- Assicurarsi che i partecipanti non hanno consumato alcol o droghe che influiscono sulle capacità di guida entro 24 ore prima dell'esperimento33.
2. Guidare la configurazione del software di simulazione
- Immettere la cartella del software di simulazione di guida, seguita dalla cartella Runtime e dalla cartella Config. Aprire quindi il file "expconfig.txt" (os., il percorso del file deve essere "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\").
- Determinare se applicare una configurazione o procedere con la simulazione di guida utilizzando le impostazioni predefinite senza alcuna configurazione appena fuori dagli schemi facendo riferimento al progetto sperimentale. La tabella 1 mostra una descrizione dettagliata delle configurazioni predefinite di tutte le opzioni disponibili.
- Procedere alla sezione 3 del protocollo se non devono essere apportate modifiche.
| Opzioni configurabili | Descrizioni | Impostazioni predefinite |
| EndExpByTime | Se utilizzare o meno l'ora dell'orologio come trigger per terminare l'esperimento. | False |
| EndExpAfterMinute | Termina l'esperimento dopo questi minuti. | 10 |
| EndExpByDist | L'utilizzo o meno dell'auto del conducente ha percorso la distanza come trigger per terminare l'esperimento. Quando vengono utilizzati trigger di tempo e distanza, terminare prima l'esperimento con quello. | False |
| EndExpAfterMeter | Terminare l'esperimento dopo che questi contatori sono stati percorsi dalla linea di partenza. | 5000 |
| enableRandomFrontalWind | Se abilitare il vento frontale, (cioè una forza che spinge l'auto nella direzione posteriore) con intervallo e durata casuali. | Vero |
| frontaleWindIntervalMin | Valore minimo (secondi) dell'intervallo del vento frontale. | 3 |
| frontalWindIntervalMax | Valore massimo (secondi) dell'intervallo del vento frontale. | 13 |
| frontalWindDurationMin | Valore minimo (secondi) della durata del vento frontale. | 2 |
| frontalWindDurationMax | Valore massimo (secondi) della durata del vento frontale. | 3 |
| frontaleWindForceMin | Valore minimo (newton) della forza del vento frontale. | 500 |
| frontalWindForceMax | Valore massimo (newton) della forza del vento frontale. | 1000 |
| enableRandomLateralWind | Se abilitare il vento laterale (cioè una forza che spinge l'auto nella direzione sinistra o destra) con intervallo e durata casuali. | Vero |
| lateralWindIntervalMin | Valore minimo (secondi) dell'intervallo del vento laterale. | 3 |
| lateralWindIntervalMax | Valore massimo (secondi) dell'intervallo del vento laterale. | 8 |
| lateralWindDurationMin | Valore minimo (secondi) della durata laterale del vento. | 2 |
| lateralWindDurationMax | Valore massimo (secondi) della durata laterale del vento. | 3 |
| lateralWindForceMin | Valore minimo (newton) della forza del vento laterale. | 1000 |
| lateralWindForceMax | Valore massimo (newton) della forza del vento laterale. | 2000 |
| leadCarConstantSpeedMPH | Velocità costante del veicolo di piombo (mph). | 40 |
| leadDistToStartWaiting | Il veicolo principale inizierà ad aspettare il veicolo del conducente quando la distanza (metri) tra la coda del veicolo principale e la testa del veicolo del conducente è maggiore del numero indicato. | 100 |
| leadDistToStopWaiting | L'auto principale aspetterà fino a quando la distanza (metri) davanti all'auto del conducente è inferiore a questo numero. | 80 |
| leadCarBrakeIntervalTimeMin | Intervallo di tempo casuale minimo (secondi) per il freno del veicolo principale. | 30 |
| leadCarBrakeIntervalTimeMax | Intervallo di tempo casuale massimo (secondi) per il veicolo principale per frenare. | 60 |
| leadCarBrakeEventDuration | Durata dell'evento del freno del veicolo principale (secondi). | 5 |
| enableRandomSMSSound | Se abilitare un suono breve di notifica del server dei messaggi riprodotto a intervalli casuali. | False |
| RandSMSIntervalMin | Intervallo di tempo casuale minimo (secondi) dall'inizio della prima notifica SMS all'inizio della seconda notifica SMS. | 2 |
| randSMSIntervalMax | Intervallo di tempo casuale massimo (secondi) dall'inizio della prima notifica SMS all'inizio della seconda notifica SMS. | 2 |
| enableRandomNbackSound | Se abilitare il suono del numero N-back riprodotto a intervalli casuali. | False |
| randNbackIntervalMin | Intervallo di tempo casuale minimo (secondi) dall'inizio del primo suono all'inizio del secondo suono. | 2.33 |
| randNbackIntervalMax | Intervallo di tempo casuale massimo (secondi) dall'inizio del primo suono all'inizio del secondo suono. | 2.33 |
| enableUDPSendData | Se abilitare la sincronizzazione dei dati del timestamp a un IP di rete locale specifico. | False |
| enableUDPSendDataAdStudy | Se abilitare l'invio dei dati al seguente IP per lo studio pubblicitario. Nota: conflitto con enableUDPSendData. | False |
| UDPTargetIPa1 | Indirizzo IP per il trasferimento UDP | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | Porta UDP di destinazione. | 1234 |
| Numero ciclo_UDP | Controllare la frequenza con cui viene inviato il timestamp. I dati verranno inviati dopo ogni UDPcycleNumero di cicli TORCS con ogni ciclo è in genere di 20 ms. | 1 |
| enableUDPQNConnection | Se abilitare o meno la simulazione dell'unità modello QN-Java con il server UDP e il client sono lo stesso computer. | False |
| Porta UDPQNtoTORCS | Porta QN UDP al numero della porta di simulazione. | 5678 |
| UDPTORCStoQNPort | Porta di simulazione al numero di porta QN UDP. | 8765 |
| leadCarBrakingByWebCommand | Se connettersi a un sito Web per il segnale di frenatura del veicolo principale. | False |
| Far_Point_Time_Ahead | Parametro utilizzato nel modello di controllo del veicolo. | 2 |
| enableCarFollowingTraining | Se abilitare o meno l'attività simulata di seguire l'auto in modalità allenamento. | / |
| carFollowingTrainingWarningInterval | Intervallo di tempo dall'ultimo inizio del suono di avviso al successivo inizio del suono di avviso della modalità di allenamento. | 2 |
Tabella 1: Elenco delle impostazioni predefinite per il software di simulazione di guida. Elenco dei valori predefiniti di tutte le opzioni configurabili associate del software di simulazione di guida insieme a una descrizione dettagliata di ogni opzione.
- Configurare le impostazioni su come terminare l'esperimento in base alla variabile di controllo decisa del progetto sperimentale.
- Decidere se utilizzare l'ora di clock come trigger per terminare l'esperimento con l'opzione "endExpByTime =" utilizzando True o False come scelta delle opzioni. Impostare questa opzione su False per replicare lo studio esemplare.
- Selezionare se terminare l'esperimento con il tempo percorso come trigger con l'opzione "endExpAfterMinute =" immettendo il numero di minuti nel formato con una cifra decimale. Il tempo percorso può essere deciso interamente dai ricercatori. Input 12 per replicare lo studio esemplare.
- Impostare se terminare l'esperimento con la distanza percorsa come trigger con l'opzione "endExpByDist =" utilizzando True o False come scelta delle opzioni. Si noti che quando entrambe le opzioni "endExpByTime =" e "endExpByDist =" sono impostate su True, l'esperimento terminerà con la condizione che viene soddisfatta per prima. Impostate questa opzione su True per replicare lo studio esemplare.
- Utilizzare l'opzione "endExpAfterMeter =" per impostare la distanza percorsa dalla linea iniziale in metri nel formato con una cifra decimale. La distanza percorsa può essere decisa interamente dai ricercatori. Inserisci 10000.0 per replicare lo studio esemplare.
- Configurare le impostazioni del vento per l'ambiente di guida simulato in base alla velocitàdel vento 34,35 progettata per l'ambiente virtuale e alcarico cognitivo 36 da avviare all'esperimento.
- Impostare se abilitare il vento frontale con intervallo e durata casuali con l'opzione "enableRandomFrontalWind =" utilizzando True o False come scelta delle opzioni. Impostate questa opzione su True per replicare lo studio esemplare.
- Definire l'intervallo di vento frontale minimo e massimo con le opzioni "frontalWindIntervalMin =" e "frontalWindIntervalMax =" immettendo rispettivamente il numero di secondi nel formato con una cifra decimale. Utilizzare l'impostazione predefinita (rispettivamente 3.0 e 13.0) per replicare lo studio esemplare.
- Definire la durata minima e massima del vento frontale con le opzioni "frontalWindDurationMin =" e "frontalWindDurationMax =" immettendo rispettivamente il numero di secondi nel formato con una cifra decimale. Utilizzare l'impostazione predefinita (rispettivamente 2.0 e 3.0) per replicare lo studio esemplare.
- Definire la forza del vento frontale minima e massima con le opzioni "frontalWindForceMin =" e "frontalWindForceMax =" indicando rispettivamente la quantità di forza in newton. Utilizzare l'impostazione predefinita (rispettivamente 500.0 e 1.000.0) per replicare lo studio esemplare.
- Scegliere se abilitare il vento laterale con intervallo e durata casuali con l'opzione "enableRandomLateralWind =" utilizzando True o False come scelta delle opzioni. Impostato su True per replicare lo studio esemplare.
- Definire l'intervallo minimo e massimo di forza del vento laterale con le opzioni "lateralWindIntervalMin =" e "lateralWindIntervalMax =" immettendo rispettivamente il numero di secondi nel formato con una cifra decimale. Utilizzare l'impostazione predefinita (rispettivamente 3.0 e 8.0) per replicare lo studio esemplare.
- Definire la durata minima e massima del vento laterale con le opzioni "lateralWindDurationMin =" e "lateralWindDurationMax =" immettendo rispettivamente il numero di secondi nel formato con una cifra decimale. Utilizzare l'impostazione predefinita (rispettivamente 2.0 e 3.0) per replicare lo studio esemplare.
- Definire la forza del vento laterale minima e massima con le opzioni "lateralWindForceMin =" e "lateralWindForceMax =" indicando rispettivamente la quantità di forza in newton. Utilizzare l'impostazione predefinita (rispettivamente 1.000,0 e 2.000,0) per replicare lo studio esemplare.
- Configurare le impostazioni per l'attività simulata di car-following in base alla progettazione sperimentale e alle esigenze35.
- Impostare la velocità costante del veicolo principale in miglia all'ora con una cifra decimale utilizzando l'opzione "leadCarConstantSpeedMPH =". Input 40 per replicare lo studio esemplare.
- Definire la distanza in metri con una cifra decimale tra il veicolo principale e il veicolo del conducente per attivare il veicolo principale per iniziare ad attendere il ritardo del veicolo del conducente o per riprendere la guida, rispettivamente con le opzioni "leadDistToStartWaiting =" e "leadDistToStopWaiting =". Utilizzare l'impostazione predefinita (rispettivamente 100.0 e 80.0) per replicare lo studio esemplare.
- Impostare l'intervallo di tempo casuale massimo e minimo degli eventi freno del veicolo principale con le opzioni "leadCarBrakeIntervalTimeMin =" e "leadCarBrakeIntervalTimeMax =" immettendo il numero di secondi nel formato con una cifra decimale (ad esempio, rispettivamente 30.0 e 60.0). Utilizzare l'impostazione predefinita (rispettivamente 30.0 e 60.0) per replicare lo studio esemplare.
- Definire la durata dell'evento freno con l'opzione "leadCarBrakeEventDuration =" immettendo il numero di secondi nel formato con una cifra decimale. Utilizzare l'impostazione predefinita (ad esempio, 5.0) per replicare lo studio esemplare.
- Configurare le impostazioni per il suono casuale di notifica dei messaggi brevi in base alla progettazione e alle esigenze sperimentali.
- Decidere se abilitare i suoni di notifica SMS (Short Message Service) con intervalli casuali con True o False come scelta delle opzioni per l'opzione "enableRandomSMSSound =". Impostare l'opzione Su False per replicare lo studio esemplare.
- Definire l'intervallo di tempo minimo e massimo dall'inizio della prima notifica SMS all'inizio della seconda notifica SMS utilizzando le opzioni "randSMSIntervalMin =" e "randSMSIntervalMax =", indicando il numero di secondi nel formato con una cifra decimale (ad esempio, rispettivamente 5.0 e 10.0).
- Configurare le impostazioni per l'attività N-backsimulata 37 in base alla progettazione sperimentale e alle esigenze.
- Impostare i suoni dei numeri N-back in modo che vengono riprodotti con intervalli casuali con True o False come scelta delle opzioni per l'opzione "enableRandomNbackSound =". Impostare l'opzione Su False per replicare lo studio esemplare.
- Definire l'intervallo di tempo minimo e massimo dall'offset del primo suono all'inizio del secondo suono utilizzando le opzioni "randNbackIntervalMin =" e "randNbackIntervalMax =" per indicare il numero di secondi nel formato con una cifra decimale (ad esempio, rispettivamente 5.0 e 10.0).
- Configurare le impostazioni UDP (User Datagram Protocol) se è necessario un trasferimento di dati UDP per l'esperimento.
- Decidere se abilitare l'UDP per il trasferimento dei dati consentendo la sincronizzazione dei dati del timestamp a uno specifico indirizzo IP di rete locale tramite l'opzione "enableUDPSendData =" utilizzando True o False come scelta delle opzioni. Abilitare questa opzione per replicare lo studio esemplare.
- Selezionare se abilitare l'UDP per il trasferimento dei dati a un indirizzo IP specifico per uno studio pubblicitario tramite l'opzione "enableUDPSendDataAdStudy =" utilizzando True o False come scelta delle opzioni. Si ricorda inoltre che questa opzione è in conflitto con "enableUDPSendData =" ed entrambe le opzioni non possono essere impostate su True contemporaneamente. Impostare l'opzione Su False per replicare lo studio esemplare.
- Definire l'indirizzo IP per il trasferimento UDP specificando ogni sezione dell'indirizzo IP utilizzando "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" e "UDPTargetIPa4 =".
- Indicare il numero di porta di destinazione in "UDPTargetPort =".
- Impostare la frequenza per i dati da inviare in "UDPcycleNumber =" con un numero intero maggiore o uguale a "1" ciclo in cui ogni ciclo è di 20 ms.
- Configurare la connessione QN (UDP queuing network) modello38 con riferimento alla progettazione sperimentale e alle esigenze.
- Impostare se abilitare o meno la simulazione dell'unità modello QN-Java in cui il server e il client UDP condividono lo stesso computer, con l'opzione "enableUDPQNConnection =" utilizzando True o False come scelta delle opzioni. Disattivare questa opzione per replicare lo studio esemplare.
- Indicare il numero dalla porta QN UDP alla porta di simulazione nell'opzione "UDPQNtoTORCSPort =".
- Indicare il numero dalla porta di simulazione alla porta QN UDP con l'opzione "UDPTORCStoQNPort =".
- Configurare se connettersi a un sito Web per i segnali di frenatura in base al progetto sperimentale nell'opzione "leadCarBrakingByWebCommand =" utilizzando True o False come scelta delle opzioni. Quando questa opzione è impostata su True, "endExpByTime =" e "endExpAfterMinute =" smetteranno di funzionare. Impostare l'opzione Su False per replicare lo studio esemplare.
- Impostare se abilitare l'attività simulata di car-following in modalità training con "enableCarFollowingTraining =" utilizzando True o False come scelta delle opzioni.
- Definire l'intervallo dall'ultimo inizio del suono di avviso all'inizio del suono di avviso successivo dell'allenamento con l'opzione "carFollowingTrainingWarningInterval =" indicando il numero di secondi con una cifra decimale (ad esempio, 2.0).
- Salvare il file al termine della configurazione.
3. Preparazione del simulatore di guida
- Collegare il volante e il proiettore centrale (un proiettore montato con proporzioni di 16:10, 192 - 240 Hz di frequenza di aggiornamento e elaborazione del colore a 8 bit) al computer. Uno schermo del proiettore con una dimensione di 223 x 126 cm è stato posizionato a 60 cm dal suolo e a 22 cm dalla parte anteriore del veicolo instrumentato.
- Impostare la risoluzione dello schermo in Opzioni | Display, in modo che corrisponda alle dimensioni dello schermo all'avvio del software di simulazione di guida.
- Immettere la pagina Configura per selezionare un lettore e seguire le istruzioni fornite dal software per calibrare il volante, l'acceleratore e il pedale del freno. Questi includono la rotazione del volante e la pressione dell'acceleratore e del pedale del freno secondo le istruzioni.
4. Configurazione e preparazione del toolkit vibrante
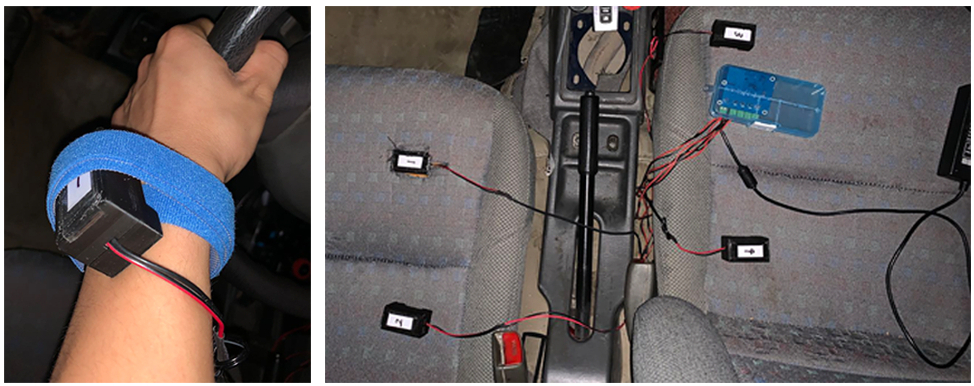
- Collegare il toolkit vibrante all'alimentatore. Ognuno dei quattro moduli ha una dimensione di 67 x 57 x 29 mm.

Figura 2: Immagini del toolkit vibrante. Il toolkit vibrante consisteva di quattro singoli moduli che possono essere attivati separatamente. Ogni modulo ha una dimensione di 67 x 57 x 29 mm.
{kind=link}
- Accendi il toolkit vibrante e collega il toolkit al computer tramite Bluetooth.
- Definire la frequenza di vibrazione da utilizzare per l'esperimento al termine di un test pilota di sensibilità cutanea o in base alle esigenze sperimentali.
- Impostare la frequenza di vibrazione su 70 Hz39,40,41 utilizzando i codici forniti come File di codifica supplementare 1. Un totale di cinque livelli di frequenza (ad esempio, 14Hz, 28Hz, 42Hz, 56Hz e 70Hz) sono attualmente disponibili con ogni stimolazione di vibrazione che dura 0,5 s per impostazione predefinita.
- Utilizzare i codici forniti come File di codifica supplementare 1 per sincronizzare gli eventi dei freni dal software di simulazione di guida e dal toolkit vibrante. La figura 3 mostra uno screenshot etichettato dei codici da rivedere come riferimento.

Figura 3: Uno screenshot etichettato dei codici nel file di codifica supplementare 1. Lo screenshot etichettato dei codici può essere utilizzato come riferimento più semplice per la configurazione e la preparazione del toolkit vibrante. Questi codici vengono utilizzati per impostare la frequenza di vibrazione del toolkit e per sincronizzare gli eventi dei freni nel software di simulazione di guida e nel toolkit vibrante per generare avvisi vibranti. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
5. Condurre l'esperimento
- Istruire i partecipanti a leggere e firmare il modulo di consenso informato che introduce il processo sperimentale e dichiarare che lo studio è quello di valutare le prestazioni di guida all'arrivo in laboratorio.
- Assistere i partecipanti a regolare la distanza del sedile dal pedale e impostare manualmente lo schienale in una posizione comoda.
- Insegna ai partecipanti come utilizzare il simulatore, incluso il volante, il pedale del freno e il pedale dell'acceleratore.
- Istruisi i partecipanti a guidare come farebbero nel mondo reale, seguendo l'auto di fronte a loro e mantenendo un progresso di due secondi dietro di essa. La figura 4 mostra la tabella di marcia utilizzata per la simulazione di guida.

Figura 4: Tabella di marcia utilizzata per la simulazione di guida. La strada utilizzata è una strada a senso unico con quattro curve (lunghezza massima 15.000 metri), tre corsie e senza semafori. Il software del simulatore di guida offre altre opzioni di progettazione stradale come opzioni per includere segnali stradali o cartelloni pubblicitari. È disponibile anche una versione compatibile con EEG. Tutti questi parametri possono essere regolati, se necessario. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Informare i partecipanti di frenare il prima possibile ogni volta che il veicolo anteriore frena, anche se lo scenario non richiede una risposta del freno. I fari posteriori del veicolo anteriore si illumineranno secondo la guida del mondo reale per indicare un evento frenante.
- Offri ai partecipanti una prova pratica di 5 minuti per imparare a mantenere una distanza di due secondi dietro il veicolo anteriore. Lo studio di pratica include una serie di 5 freni casuali.
- Durante la prova di pratica, se i partecipanti sono meno di 1,5 s dietro il veicolo anteriore, il software di simulazione di guida suoterà un prompt con una voce femminile "troppo vicina, si prega di rallentare".
- Se i partecipanti sono tra le 2.25 e le 2.5 s dietro il veicolo anteriore, il software di simulazione di guida giocherà un prompt con una voce femminile "troppo lontano, si prega di accelerare".
- Non includere i dati della prova pratica per l'analisi.
- Fai sapere ai partecipanti che lo studio può essere interrotto senza alcuna penalità avvisando gli sperimentatori in qualsiasi momento, se necessario.
- Inizia l'esperimento formale una volta che i partecipanti hanno completato la sessione di esercitazione e possono mantenere una distanza stabile dopo.
- Inizia la sessione sperimentale formale, che consiste in un totale di quattro blocchi (ad esempio, dito, polso, tempio e solo guida) con 13 eventi di frenata casuali in ogni blocco, con un totale di 52 prove sperimentali. L'ordine delle condizioni è controbilanciato dal design quadrato latino. Nelle prove formali non viene fornito alcun prompt vocale.
- Assistere i partecipanti a indossare il toolkit vibrante utilizzando il nastro medico prima di ogni blocco di prove in base alle condizioni assegnate. Il toolkit vibrante (se indossato) avverte i partecipanti di frenare quando il veicolo anteriore è in frenata. I fari posteriori del veicolo anteriore vengono illuminati ogni volta che il veicolo anteriore frena.
- Assicurarsi che ai partecipanti sia concesso un riposo di 2 minuti al completamento di ogni blocco per ridurre gli effetti di riporto.
- Chiedi ai partecipanti la loro posizione preferita per il toolkit vibrante e l'intensità di vibrazione percepita con una scala Likert a 7 punti al termine di tutte le prove. Viene inoltre registrato il tasso di utilizzo di ogni accessori indossabile giornaliero (ad esempio, orologio, occhiali, auricolari e anello). Nella scala delle preferenze per la posizione del toolkit vibrante, "1" rappresenta "meno preferito" e "7" rappresenta "il più preferito", mentre nella scala di intensità delle vibrazioni "1" rappresenta "sensazione debole" e "7" rappresenta "sensazione forte".
6. Analisi dei dati
- Raccogli i dati sul comportamento di guida dei partecipanti a 50 Hz utilizzando il software di simulazione della guida, tra cui il tempo di risposta del freno, la velocità del veicolo, la velocità di inversione del volante, la posizione della corsia (SDLP) e la distanza di progresso, ecc.
- Eseguire l'analisi dei dati delle prestazioni dei driver.
- Condurre un'analisi anomalia utilizzando la distribuzione normale con cut-off come tre deviazioni standard dalla media per determinare quali dati includere per ulteriori analisi.
- Calcola il tempo di risposta del freno sottraendo il tempo in cui il veicolo partecipante frena (cioè una riduzione minima dell'1% del pedaledel freno 36,42)dal momento in cui il veicolo anteriore inizia a frenare.
- Etichettare i dati come "nessuna risposta del freno" se il tempo di risposta del freno è maggiore o uguale a 5 s (ad esempio, un mancato freno entro 5 s dopo i freni anteriori del veicolo).
- Dividi il numero di freni riusciti per il numero totale di freni eseguiti dal veicolo anteriore per calcolare la velocità di risposta del freno.
- Calcolare in media tutti i valori di ciascun partecipante per ottenere il tasso medio di risposta dei freni e il tempo di risposta dei freni di ciascuna condizione e calcolare la deviazione standard su tali valori per ulteriori analisi.
Risultati
Lo studio esemplare riportato in questo articolo ha condotto il compito di seguire l'auto utilizzando il simulatore di guida e il toolkit vibrante, che è stato anche pubblicato in precedenza su una rivistaaccademica 22. È degno di nota che la versione precedente del toolkit vibrante sia stata utilizzata durante lo studio esemplare, mentre una nuova versione del toolkit vibrante è stata introdotta nel protocollo precedente. Lo studio è stato un esperimento di progettazione all'interno del sogge...
Discussione
La piattaforma di simulazione di guida e il toolkit vibrante hanno ragionevolmente minato l'applicazione di potenziali dispositivi vibrotattili indossabili nella vita reale, fornendo una tecnica efficace nello studio della ricerca relativa alla guida. Con l'uso di questa tecnologia, è ora disponibile un ambiente sperimentale sicuro con un'elevata configurabilità e convenienza per condurre ricerche paragonabili alla guida del mondo reale.
Ci sono diversi passaggi che richiedono maggiore atten...
Divulgazioni
Gli autori non hanno dichiarato alcuna divulgazione finanziaria o conflitti di interesse.
Riconoscimenti
Questo progetto è stato sponsorizzato dalla Beijing Talents Foundation.
Materiali
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Riferimenti
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati