
Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Kit de herramientas vibratoria táctil y plataforma de simulación de conducción para la investigación relacionada con la conducción
En este artículo
Erratum Notice
Resumen
Este protocolo describe una plataforma de simulación de conducción y un kit de herramientas vibratorias táctiles para la investigación de la investigación relacionada con la conducción. También se presenta un experimento ejemplar que explora la eficacia de las advertencias táctiles.
Resumen
El sistema de advertencia de colisión desempeña un papel clave en la prevención de distracciones de conducción y conducción somnoliento. Estudios anteriores han demostrado las ventajas de las advertencias táctiles en la reducción del tiempo de respuesta de los frenos del conductor. Al mismo tiempo, se han demostrado advertencias táctiles eficaces en la solicitud de toma de control (TOR) para vehículos parcialmente autónomos.
Cómo se puede optimizar el rendimiento de las advertencias táctiles es un tema de investigación en caliente en curso en este campo. Por lo tanto, el software de simulación de conducción de bajo costo presentado y los métodos se introducen para atraer a más investigadores a participar en la investigación. El protocolo presentado se ha dividido en cinco secciones: 1) participantes, 2) configuración de software de simulación de conducción, 3) preparación del simulador de conducción, 4) configuración y preparación del kit de herramientas vibratorias, y 5) llevar a cabo el experimento.
En el estudio ejemplar, los participantes usaron el kit de herramientas vibratoria táctil y realizaron una tarea establecida de seguimiento de automóviles utilizando el software de simulación de conducción personalizado. El vehículo delantero frenó intermitentemente, y se entregaron advertencias vibratorias cada vez que el vehículo delantero estaba frenando. Se instruyó a los participantes que respondieran lo antes posible a los frenos repentinos del vehículo delantero. La dinámica de conducción, como el tiempo de respuesta de los frenos y la tasa de respuesta a los frenos, fueron registradas por el software de simulación para el análisis de datos.
El protocolo presentado ofrece información sobre la exploración de la eficacia de las advertencias táctiles en diferentes ubicaciones del cuerpo. Además de la siguiente tarea que se demuestra en el experimento ejemplar, este protocolo también proporciona opciones para aplicar otros paradigmas a los estudios de simulación de conducción mediante la creación de una configuración de software sencilla sin ningún desarrollo de código. Sin embargo, es importante tener en cuenta que debido a su precio asequible, el software de simulación de conducción y hardware introducido aquí puede no ser capaz de competir plenamente con otros simuladores de conducción comercial de alta fidelidad. Sin embargo, este protocolo puede actuar como una alternativa asequible y fácil de usar a los simuladores de conducción comercial generales de alta fidelidad.
Introducción
Según los datos revelados por las Estimaciones Sanitarias Mundiales en 2016, los accidentes de tráfico son la octava causa de muertes mundiales, con 1,4 millones de muertes en todo el mundo1. En el año 2018, el 39,2% de los accidentes de tráfico fueron colisiones con vehículos de motor en el transporte, y el 7,2% fueron colisiones traseras. Una solución para aumentar la seguridad de los vehículos y las carreteras es el desarrollo de un sistema avanzado de asistencia a la conducción (ADAS) para advertir a los conductores de posibles peligros. Los datos han demostrado que ADAS puede reducir en gran medida la velocidad de las colisiones traseras, y es aún más eficaz cuando está equipado con un sistema de freno automático2. Además, con el desarrollo de vehículos autónomos, se requerirá una menor participación humana para controlar el vehículo, haciendo de un sistema de alerta de solicitud de toma de control (TOR) una necesidad cuando el vehículo autónomo no se regula. El diseño del sistema de advertencia ADAS y TOR es ahora una pieza importante de tecnología para que los conductores eviten accidentes inminentes en pocos segundos. El experimento ejemplar utilizó un kit de herramientas vibratorio junto con una plataforma de simulación de conducción para investigar qué ubicación generaría el mejor resultado cuando se ha utilizado un sistema de advertencia vibrotactile como un potencial sistema de advertencia ADAS y TOR.
Categorizadas por canales perceptivos, generalmente hay tres tipos de modalidades de advertencia, es decir, visual, auditiva y táctil. Cada modalidad de advertencia tiene sus propios méritos y limitaciones. Cuando los sistemas de advertencia visual están en uso, los conductores pueden sufrir de sobrecarga visual3,deteriorando las prestaciones de conducción debido a la ceguera involuntaria4,5. Aunque un sistema de advertencia auditiva no influye en el campo visual de los conductores, su eficacia depende en gran medida del entorno, como la música de fondo y otros ruidos en el entorno de conducción6,7. Por lo tanto, las situaciones que contienen otra información auditiva externa o ruido significativo pueden conducir a sordera involuntaria8,9,reduciendo la eficacia de un sistema de advertencia auditiva. En comparación, los sistemas de advertencia táctil no compiten con el procesamiento visual o auditivo de los conductores. Mediante el envío de advertencias de vibrotactile a los conductores, los sistemas de advertencia táctil superan las limitaciones de los sistemas de advertencia visual y auditiva.
Estudios anteriores mostraron que las advertencias táctiles pueden beneficiar a los conductores al acortar su tiempo de respuesta de frenos. También se encontró que los sistemas de advertencia táctil producen un resultado más eficaz sobre los sistemas visuales10,11 y auditivos12,13,14 de advertencia en ciertas situaciones. Sin embargo, investigaciones limitadas se han centrado en investigar la ubicación óptima para colocar un dispositivo de advertencia táctil. Según la hipótesis de la corteza sensorial15 y la hipótesis de distancia sensorial16,el estudio ejemplar eligió las áreas del dedo, la muñeca y la sien como los lugares experimentales para colocar un dispositivo de advertencia táctil. Con el protocolo introducido, la frecuencia y el tiempo de entrega de una advertencia vibratoria, y los intervalos entre vibraciones del kit de herramientas vibratorio, se pueden configurar para adaptarse a los requisitos experimentales. Este kit de herramientas vibratorio consistía en un chip maestro, un chip regulador de voltaje, un multiplexor, un adaptador USB a Transistor-Transistor-Lógico (TTL), un Transistor de Efecto de Campo Metal-Oxide-Semiconductor (MOSFET) y un módulo Bluetooth. El número de módulos vibratorios también puede variar según las necesidades de los investigadores, con hasta cuatro módulos vibrando al mismo tiempo. Al implementar el kit de herramientas vibratorio en los experimentos relacionados con la conducción, se puede configurar para adaptarse a la configuración experimental, así como sincronizarse con los datos de rendimiento de conducción mediante la revisión de los códigos de la simulación de conducción.
Mientras que para los investigadores, llevar a cabo un experimento de conducción en una plataforma virtual es más factible que en el mundo real debido al riesgo y el costo involucrados. Por ejemplo, la recopilación de indicadores de rendimiento puede ser difícil, y es difícil controlar los factores ambientales involucrados cuando se llevan a cabo experimentos en el mundo real. Como resultado, muchos estudios han utilizado simuladores de conducción de base fija que se ejecutan en PC en los últimos años como una alternativa para llevar a cabo estudios de conducción en carretera. Después de aprender, desarrollar e investigar durante más de 11 años en la comunidad de investigación de conducción, establecimos una plataforma de simulación de conducción con un coche real que consiste en un software de simulación de conducción de código abierto y un kit de hardware, incluyendo un volante y una caja de cambios, tres pedales, tres proyectores montados y tres pantallas de proyector. Con el software de simulación de conducción soporta sólo una sola pantalla, el protocolo presentado utilizó sólo el proyector central y la pantalla del proyector para llevar a cabo el experimento.
Hay dos ventajas principales de utilizar la plataforma de simulación de conducción presentada. Una ventaja de esta plataforma es que utiliza un software de código abierto. Utilizando la plataforma de código abierto fácil de usar, los investigadores pueden personalizar el kit de herramientas de simulación y vibración para sus necesidades de investigación únicas mediante la creación de una configuración de software simple sin ningún desarrollo de código. Mediante la revisión de los códigos, los investigadores pueden crear simulaciones de conducción que proporcionan una fidelidad relativa a la realidad con un montón de opciones disponibles en los tipos de automóviles, tipos de carretera, resistencia del volante, turbulencias laterales y longitudinales del viento, interfaces de programa de aplicación de eventos de tiempo y freno (API) para la sincronización de software externo, y la implementación de los paradigmas de comportamiento como la tarea de seguimiento de coches y la tarea N-Back. Aunque la realización de investigaciones relacionadas con la conducción en un simulador de conducción no puede replicar completamente la conducción en el mundo real, los datos recogidos a través de un simulador de conducción es razonable y ha sido ampliamente adoptado por los investigadores17,18.
Otra ventaja del simulador de conducción propuesto es su bajo costo. Como se mencionó anteriormente, el software de simulación de conducción introducido es un software de código abierto que está disponible para los usuarios de forma gratuita. Además, el costo total de toda la configuración de hardware en este protocolo es menor en comparación con los simuladores de conducción comerciales típicos de alta fidelidad. La Figura 1 a y b muestran la configuración completa de dos simuladores de conducción con un costo que va de $3000 a $30000. Por el contrario, los simuladores de conducción comerciales típicos de alta fidelidad (base fija) suelen costar entre $10,000 y $100,000. Con su precio altamente asequible, este simulador de conducción puede ser una opción popular no sólo para fines de investigación académica, sino también para la realización de clases de conducción19 y para la demostración de tecnologías relacionadas con la conducción20,21.

Figura 1: Una imagen de los simuladores de conducción. Ambos simuladores de conducción consistían en un volante y una caja de cambios, tres pedales y un vehículo. (a) Una configuración de simulador de conducción de $3000 que utilizó una pantalla LCD de 80 pulgadas con una resolución de 3840 × 2160. (b) Una configuración de simulador de conducción de $30000 que utilizó tres proyectores montados y tres pantallas de proyector con una dimensión de 223 x 126 cm cada uno. Las pantallas de proyección se colocaron a 60 cm sobre el suelo y a 22 cm de la parte delantera del vehículo. Solo se utilizaron el proyector central y la pantalla del proyector para el experimento actual. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
El software de simulación de conducción y el kit de herramientas vibratorios en el método propuesto ya han sido utilizados en estudios anteriores por nuestros investigadores22,23,24,25,26,27,28,29. Este kit de herramientas vibratorias autodesarrollada siguiendo el estándar ISO30 se puede aplicar en diferentes campos31,32 ajustando la frecuencia de vibración y la intensidad. Es importante tener en cuenta que se ha desarrollado una versión más reciente del kit de herramientas vibratorias que se introduce en el siguiente protocolo. En lugar de ajustar la frecuencia de vibración utilizando un adaptador de voltaje ajustable, la versión más reciente está equipada con cinco frecuencias de vibración diferentes y se puede ajustar más fácilmente utilizando los códigos proporcionados en el archivo de codificación suplementario 1. Además, el simulador de conducción presentado proporciona a los investigadores una manera segura, barata y eficaz de investigar varios tipos de investigación relacionada con la conducción. Por lo tanto, este protocolo es adecuado para laboratorios de investigación que tienen un presupuesto limitado y tienen una fuerte necesidad de personalizar los entornos de conducción experimental.
Protocolo
NOTA: Todos los métodos descritos aquí han sido aprobados por la Junta de Revisión Institucional (IRB) de la Universidad de Tsinghua y se obtuvo el consentimiento informado de todos los participantes.
1. Participantes
- Realice un análisis de potencia para calcular el número requerido de participantes para la contratación de acuerdo con el diseño experimental para alcanzar el poder estadístico.
- Equilibrar el sexo de los participantes durante la contratación tanto como sea posible.
- Asegúrese de que los participantes tengan un permiso de conducir válido y al menos un año de experiencia de conducción.
- Asegúrese de que los participantes tengan visión normal o corregida a la visión normal usando el gráfico de visión.
- Asegúrese de que los participantes no consumieron alcohol o drogas que afecten las habilidades de conducción dentro de las 24 h antes del experimento33.
2. Configuración del software de simulación de conducción
- Escriba la carpeta del software de simulación de conducción, seguido de la carpeta Runtime y la carpeta Config. A continuación, abra el archivo "expconfig.txt" (es decir, la ruta de acceso del archivo debe ser "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\").
- Determine si desea aplicar alguna configuración o continuar con la simulación de conducción utilizando la configuración predeterminada sin ninguna configuración recién salida de la caja haciendo referencia al diseño experimental. La Tabla 1 muestra una descripción detallada de las configuraciones predeterminadas de todas las opciones disponibles.
- Proceda a la Sección 3 del protocolo si no se deben realizar cambios.
| Opciones configurables | Descripciones | Configuración predeterminada |
| endExpByTime | Si se debe o no utilizar el tiempo de reloj como desencadenador para finalizar el experimento. | Falso |
| endExpAfterMinute | Termina el experimento después de estos minutos. | 10 |
| endExpByDist | Si utilizar o no el coche del conductor recorrió la distancia como un disparador para finalizar el experimento. Cuando se utilicen desencadenadores de tiempo y distancia, finalice primero el experimento con el que se produce. | Falso |
| endExpAfterMeter | Finaliza el experimento después de que estos medidores hayan sido recorridos desde la línea de salida. | 5000 |
| enableRandomFrontalWind | Si se permite el viento frontal, (es decir, una fuerza empujando el coche a la dirección trasera) con intervalo y duración aleatorios. | Verdad |
| frontalWindIntervalMin | Valor mínimo (segundos) del intervalo de viento frontal. | 3 |
| frontalWindIntervalMax | Valor máximo (segundos) del intervalo de viento frontal. | 13 |
| frontalWindDurationMin | Valor mínimo (segundos) de la duración del viento frontal. | 2 |
| frontalWindDurationMax | Valor máximo (segundos) de la duración del viento frontal. | 3 |
| frontalWindForceMin | Valor mínimo (newton) de la fuerza del viento frontal. | 60s |
| frontalWindForceMax | Valor máximo (newton) de la fuerza del viento frontal. | 1000 |
| enableRandomLateralWind | Ya sea para habilitar el viento lateral (es decir, una fuerza empujando el coche hacia la dirección izquierda o derecha) con intervalo y duración aleatorios. | Verdad |
| lateralWindIntervalMin | Valor mínimo (segundos) del intervalo de viento lateral. | 3 |
| lateralWindIntervalMax | Valor máximo (segundos) del intervalo de viento lateral. | 8 |
| lateralWindDurationMin | Valor mínimo (segundos) de la duración del viento lateral. | 2 |
| lateralWindDurationMax | Valor máximo (segundos) de la duración del viento lateral. | 3 |
| lateralWindForceMin | Valor mínimo (newton) de la fuerza del viento lateral. | 1000 |
| lateralWindForceMax | Valor máximo (newton) de la fuerza del viento lateral. | 2000 |
| leadCarConstantSpeedMPH | Velocidad constante del vehículo de plomo (mph). | 40 |
| leadDistToStartWaiting | El vehículo principal comenzará a esperar al vehículo del conductor cuando la distancia (metros) entre la cola del vehículo de plomo y la cabeza del vehículo del conductor sea mayor que el número indicado. | 100 |
| leadDistToStopWaiting | El coche de plomo esperará hasta que la distancia (metros) por delante del coche del conductor sea menor que este número. | 80 |
| leadCarBrakeIntervalTimeMin | Intervalo de tiempo aleatorio mínimo (segundos) para que el vehículo de plomo frene. | 30 |
| leadCarBrakeIntervalTimeMax | Intervalo de tiempo aleatorio máximo (segundos) para que el vehículo de plomo frene. | 60 |
| leadCarBrakeEventDuration | Duración del evento de freno del vehículo de plomo (segundos). | 5 |
| enableRandomSMSSound | Si desea habilitar el sonido de notificación del servidor de mensajes cortos reproducido con intervalos aleatorios. | Falso |
| randSMSIntervalMin | Intervalo de tiempo aleatorio mínimo (segundos) desde el inicio de la primera notificación SMS hasta el inicio de la segunda notificación SMS. | 2 |
| randSMSIntervalMax | Intervalo de tiempo aleatorio máximo (segundos) desde el inicio de la primera notificación SMS hasta el inicio de la segunda notificación SMS. | 2 |
| enableRandomNbackSound | Si desea habilitar el sonido del número N-back reproducido con intervalos aleatorios. | Falso |
| randNbackIntervalMin | Intervalo de tiempo aleatorio mínimo (segundos) desde el inicio del primer sonido hasta el inicio del segundo sonido. | 2.33 |
| randNbackIntervalMax | Intervalo de tiempo aleatorio máximo (segundos) desde el inicio del primer sonido hasta el inicio del segundo sonido. | 2.33 |
| enableUDPSendData | Si desea habilitar la sincronización de datos de marca de tiempo a una DIRECCIÓN IP de red local específica. | Falso |
| enableUDPSendDataAdStudy | Si desea permitir que los datos se envíen a la siguiente IP para el estudio de anuncios. Nota: Conflicto con enableUDPSendData. | Falso |
| UDPTargetIPa1 | Dirección IP para la transferencia UDP | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | Puerto UDP objetivo. | 1234 |
| UDPcycleNumber | Controle la frecuencia con la que se envía la marca de tiempo. Los datos se enviarán después de cada UDPcycleNumber de ciclos TORCS con cada ciclo es generalmente 20 ms. | 1 |
| habilitarUDPQNConnection | Si se habilite o no la simulación de unidades de modelo QN-Java con el servidor UDP y el cliente son el mismo equipo. | Falso |
| UDPQNtoTORCSPort | El puerto de QN UDP al número de puerto de simulación. | 5678 |
| UDPTORCStoQNPort | El puerto de simulación al número de puerto de QN UDP. | 8765 |
| leadCarBrakingByWebCommand | Si se conecta a un sitio web para la señal de frenado del vehículo principal. | Falso |
| Far_Point_Time_Ahead | El parámetro utilizado en el modelo de control del vehículo. | 2 |
| enableCarFollowingTraining | Habilitar o no la tarea simulada de seguimiento de coches en modo de entrenamiento. | / |
| cocheFollowingTrainingWarningInterval | Intervalo de tiempo desde el último inicio de sonido de advertencia hasta el siguiente inicio de sonido de advertencia del modo de entrenamiento. | 2 |
Tabla 1: Lista de ajustes predeterminados para el software de simulación de conducción. Una lista de los valores predeterminados de todas las opciones configurables asociadas del software de simulación de conducción junto con una descripción detallada de cada opción.
- Configure los ajustes sobre cómo finalizar el experimento en función de la variable de control decidida del diseño experimental.
- Decida si desea utilizar el tiempo de reloj como desencadenador para finalizar el experimento con la opción "endExpByTime =" utilizando True o False como opción de opciones. Establezca esta opción en False para replicar el estudio ejemplar.
- Seleccione si desea finalizar el experimento con el tiempo recorrido como desencadenador con la opción "endExpAfterMinute =" introduciendo el número de minutos en el formato con un decimal. El tiempo recorrido puede ser decidido enteramente por los investigadores. Entrada 12 para replicar el estudio ejemplar.
- Establezca si desea finalizar el experimento con la distancia recorrida como desencadenador con la opción "endExpByDist =" utilizando True o False como opción de opciones. Tenga en cuenta que cuando las opciones "endExpByTime =" y "endExpByDist =" se establecen en True, el experimento finalizará con la condición que se cumple primero. Establezca esta opción en True para replicar el estudio ejemplar.
- Utilice la opción "endExpAfterMeter =" para establecer la distancia recorrida desde la línea inicial en metros en el formato con un decimal. La distancia recorrida puede ser decidida enteramente por los investigadores. Entrada 10000.0 para replicar el estudio ejemplar.
- Configure los ajustes de viento para el entorno de conducción simulado de acuerdo con la velocidad del viento34,35 diseñado para el entorno virtual y la carga cognitiva36 que se iniciará en el experimento.
- Establezca si desea habilitar el viento frontal con intervalo aleatorio y duración con la opción "enableRandomFrontalWind =" utilizando True o False como opción de opciones. Establezca esta opción en True para replicar el estudio ejemplar.
- Defina el intervalo de viento frontal mínimo y máximo con las opciones "frontalWindIntervalMin =" y "frontalWindIntervalMax =" introduciendo el número de segundos en el formato con un decimal, respectivamente. Utilice la configuración predeterminada (es decir, 3.0 y 13.0, respectivamente) para replicar el estudio ejemplar.
- Defina la duración mínima y máxima del viento frontal con las opciones "frontalWindDurationMin =" y "frontalWindDurationMax =" introduciendo el número de segundos en el formato con un decimal, respectivamente. Utilice la configuración predeterminada (es decir, 2.0 y 3.0, respectivamente) para replicar el estudio ejemplar.
- Defina la fuerza de viento frontal mínima y máxima con las opciones "frontalWindForceMin =" y "frontalWindForceMax =" indicando la cantidad de fuerza en newton, respectivamente. Utilice la configuración predeterminada (es decir, 500,0 y 1.000,0, respectivamente) para replicar el estudio ejemplar.
- Elija si desea habilitar el viento lateral con intervalo aleatorio y duración con la opción "enableRandomLateralWind =" utilizando True o False como opción de opciones. Estadzca en True para replicar el estudio ejemplar.
- Defina el intervalo de fuerza de viento lateral mínimo y máximo con las opciones "lateralWindIntervalMin =" y "lateralWindIntervalMax =" introduciendo el número de segundos en el formato con un decimal, respectivamente. Utilice la configuración predeterminada (es decir, 3.0 y 8.0, respectivamente) para replicar el estudio ejemplar.
- Defina la duración mínima y máxima del viento lateral con las opciones "lateralWindDurationMin =" y "lateralWindDurationMax =" introduciendo el número de segundos en el formato con un decimal, respectivamente. Utilice la configuración predeterminada (es decir, 2.0 y 3.0, respectivamente) para replicar el estudio ejemplar.
- Defina la fuerza de viento lateral mínima y máxima con las opciones "lateralWindForceMin =" y "lateralWindForceMax =" indicando la cantidad de fuerza en newton, respectivamente. Utilice la configuración predeterminada (es decir, 1.000,0 y 2.000,0, respectivamente) para replicar el estudio ejemplar.
- Configure los ajustes para la tarea simulada de seguimiento de coches según el diseño experimental y necesita35.
- Establezca la velocidad constante del vehículo de plomo en millas por hora con un decimal utilizando la opción "leadCarConstantSpeedMPH =". Entrada 40 para replicar el estudio ejemplar.
- Defina la distancia en metros con un decimal entre el vehículo principal y el vehículo del conductor para activar el vehículo principal para que comience a esperar a que el vehículo del conductor se ponga al día, o para reanudar la conducción, con las opciones "leadDistToStartWaiting =" y "leadDistToStopWaiting =", respectivamente. Utilice la configuración predeterminada (es decir, 100.0 y 80.0, respectivamente) para replicar el estudio ejemplar.
- Establezca el intervalo de tiempo aleatorio máximo y mínimo de los eventos de freno del vehículo principal con las opciones "leadCarBrakeIntervalTimeMin =" y "leadCarBrakeIntervalTimeMax =" introduciendo el número de segundos en el formato con un decimal (por ejemplo, 30,0 y 60,0), respectivamente. Utilice la configuración predeterminada (es decir, 30.0 y 60.0 respectivamente) para replicar el estudio ejemplar.
- Defina la duración del evento de freno con la opción "leadCarBrakeEventDuration =" introduciendo el número de segundos en el formato con un decimal. Utilice la configuración predeterminada (es decir, 5.0) para replicar el estudio ejemplar.
- Configure los ajustes para el sonido de notificación de mensajes cortos aleatorios según el diseño experimental y las necesidades.
- Decida si desea habilitar los sonidos de notificación de servicio de mensajes cortos (SMS) reproducir con intervalos aleatorios con True o False como la opción de opciones para la opción "enableRandomSMSSound =". Establezca la opción False para replicar el estudio ejemplar.
- Defina el intervalo de tiempo mínimo y máximo desde el inicio de la primera notificación SMS hasta el inicio de la segunda notificación por SMS utilizando las opciones "randSMSIntervalMin =" y "randSMSIntervalMax =", indicando el número de segundos en el formato con un decimal (por ejemplo, 5,0 y 10,0) respectivamente.
- Configure los ajustes de la tarea N-back simulada37 según el diseño y las necesidades experimentales.
- Establezca sonidos de número N-back para que se reproduzcan con intervalos aleatorios con True o False como opción de opciones para la opción "enableRandomNbackSound =". Establezca la opción False para replicar el estudio ejemplar.
- Defina el intervalo de tiempo mínimo y máximo desde el desplazamiento del primer sonido hasta el inicio del segundo sonido utilizando las opciones "randNbackIntervalMin =" y "randNbackIntervalMax =" para indicar el número de segundos en el formato con un decimal (por ejemplo, 5,0 y 10,0), respectivamente.
- Configure la configuración del Protocolo de datagramas de usuario (UDP) si se requiere una transferencia de datos UDP para el experimento.
- Decida si desea habilitar el UDP para la transferencia de datos al permitir la sincronización de datos de marca de tiempo a una dirección IP de red local específica a través de la opción "enableUDPSendData =" mediante true o false como opción de opciones. Habilite esta opción para replicar el estudio ejemplar.
- Seleccione si desea habilitar el UDP para la transferencia de datos a una dirección IP específica para un estudio de anuncios a través de la opción "enableUDPSendDataAdStudy =" utilizando True o False como opción de opciones. También se recuerda que esta opción está en conflicto con el "enableUDPSendData =" y ambas opciones no se pueden establecer en True al mismo tiempo. Establezca la opción False para replicar el estudio ejemplar.
- Defina la dirección IP para la transferencia UDP especificando cada sección de la dirección IP mediante "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" y "UDPTargetIPa4 =".
- Indique el número de puerto de destino en "UDPTargetPort =".
- Establezca la frecuencia para que los datos se envíen en "UDPcycleNumber =" con cualquier entero mayor o igual que el ciclo "1" en el que, cada ciclo es de 20 ms.
- Configure la conexión de la red de cola UDP (QN) modelo38 con referencia al diseño y las necesidades experimentales.
- Establezca si desea habilitar o no la simulación de unidad de modelo QN-Java en la que, el servidor UDP y el cliente comparten el mismo equipo, con la opción "enableUDPQNConnection =" utilizando True o False como opción de opciones. Deshabilite esta opción para replicar el estudio ejemplar.
- Indique el número del puerto del QN UDP al puerto de simulación bajo la opción "UDPQNtoTORCSPort =".
- Indique el número del puerto de simulación al puerto del QN UDP bajo la opción "UDPTORCStoQNPort =".
- Configure si desea conectarse a un sitio web para las señales de frenado de acuerdo con el diseño experimental bajo la opción "leadCarBrakingByWebCommand =" utilizando True o False como opción de opciones. Tenga en cuenta que cuando esta opción se establece en True, "endExpByTime =" y "endExpAfterMinute =" dejarán de funcionar. Establezca la opción False para replicar el estudio ejemplar.
- Establezca si desea habilitar la tarea de seguimiento de coches simulada en modo de entrenamiento con el "enableCarFollowingTraining =" utilizando True o False como opción de opciones.
- Defina el intervalo desde el último inicio de sonido de advertencia hasta el siguiente inicio de sonido de advertencia del entrenamiento con la opción "carFollowingTrainingWarningInterval =" indicando el número de segundos con un decimal (por ejemplo, 2.0).
- Guarde el archivo al completar la configuración.
3. Preparación del simulador de conducción
- Conecte el volante y el proyector central (un proyector montado con una relación de aspecto de 16:10, frecuencia de actualización de 192 a 240 Hz y procesamiento de color de 8 bits) al ordenador. Una pantalla de proyector con una dimensión de 223 x 126 cm se colocó 60 cm por encima del suelo y a 22 cm de distancia de la parte delantera del vehículo instrumentado.
- Establezca la resolución de pantalla en Opciones | Pantalla, para que coincida con el tamaño de la pantalla al iniciar el software de simulación de conducción.
- Introduzca la página Configurar para seleccionar un reproductor y siga las instrucciones proporcionadas por el software para calibrar el volante, el acelerador y el pedal de freno. Estos incluyen girar el volante y presionar el acelerador y el pedal de freno según las instrucciones.
4. Configuración y preparación del kit de herramientas vibratorias
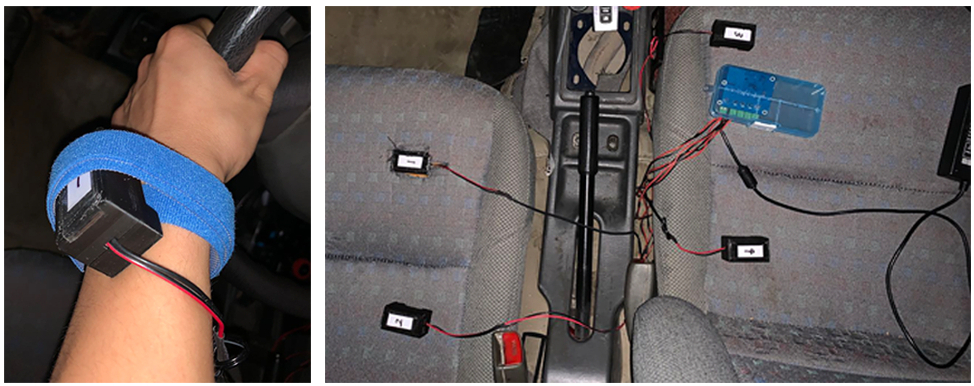
- Conecte el kit de herramientas vibratorio a la fuente de alimentación. Cada uno de los cuatro módulos tiene una dimensión de 67 x 57 x 29 mm. La Figura 2 muestra una imagen del kit de herramientas vibratorio.

Figura 2: Imágenes del kit de herramientas vibratorio. El kit de herramientas vibratorias consistió en cuatro módulos individuales que se pueden activar por separado. Cada módulo tiene una dimensión de 67 x 57 x 29 mm. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Encienda el kit de herramientas vibratorio y conecte el kit de herramientas al ordenador a través de Bluetooth.
- Defina la frecuencia de vibración que se utilizará para el experimento al completar una prueba piloto de sensibilidad cutánea o según necesidades experimentales.
- Ajuste la frecuencia de vibración a 70 Hz39,40,41 utilizando los códigos proporcionados como archivo de codificación suplementario 1. Un total de cinco niveles de frecuencia (es decir, 14Hz, 28Hz, 42Hz, 56Hz y 70Hz) están actualmente disponibles con cada estimulación de vibración que dura 0,5 s por defecto.
- Utilice los códigos proporcionados como archivo de codificación suplementario 1 para sincronizar los eventos de freno del software de simulación de conducción y el kit de herramientas vibratorios. La Figura 3 muestra una captura de pantalla etiquetada de los códigos que se revisará como referencia.

Figura 3: Una captura de pantalla etiquetada de los códigos en el archivo de codificación suplementario 1. La captura de pantalla etiquetada de códigos se puede utilizar como una referencia más fácil para la configuración y preparación del kit de herramientas vibratorios. Estos códigos se utilizan para establecer la frecuencia de vibración del kit de herramientas y para sincronizar los eventos de freno en el software de simulación de conducción y el kit de herramientas vibratorios para generar advertencias vibratorias. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
5. Realización del experimento
- Instruya a los participantes a leer y firmar el formulario de consentimiento informado que introduce el proceso experimental y declare que el estudio debe evaluar el rendimiento de conducción a su llegada al laboratorio.
- Ayude a los participantes a ajustar la distancia del asiento al pedal y ajuste el respaldo a una posición cómoda manualmente.
- Enseñe a los participantes cómo operar el simulador, incluyendo el volante, el pedal de freno y el pedal del acelerador.
- Instruya a los participantes a conducir como lo harían en el mundo real, siguiendo el coche delante de ellos y manteniendo un avance de dos segundos detrás de él. La Figura 4 muestra la hoja de ruta utilizada para la simulación de conducción.

Figura 4: Hoja de ruta utilizada para la simulación de conducción. La carretera utilizada es una carretera unidireccional con cuatro curvas (longitud máxima de 15.000 metros), tres carriles y sin semáforos. El software simulador de conducción ofrece otras opciones de diseño de carreteras, como opciones para incluir señales de tráfico o vallas publicitarias. También hay disponible una versión compatible con EEG. Todos estos parámetros se pueden ajustar, si es necesario. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Informe a los participantes que frenen lo antes posible cada vez que el vehículo delantero frene, incluso si el escenario no requiere una respuesta de freno. Las luces traseras del vehículo delantero se encenderán según la conducción del mundo real para indicar un evento de freno.
- Proporcione a los participantes una prueba de práctica de 5 minutos para aprender a mantener una distancia de avance de dos segundos detrás del vehículo delantero. La prueba de práctica incluye un conjunto de 5 frenos aleatorios.
- Durante la prueba de práctica, si los participantes están a menos de 1,5 s detrás del vehículo delantero, el software de simulación de conducción reproducirá un mensaje con una voz femenina "demasiado cerca, por favor reduzca la velocidad".
- Si los participantes están entre 2,25 y 2,5 s detrás del vehículo delantero, el software de simulación de conducción reproducirá un mensaje con una voz femenina "demasiado lejos, por favor acelere".
- No incluya datos de la prueba de práctica para el análisis.
- Haga saber a los participantes que el estudio se puede detener sin ninguna penalización notificando a los experimentadores en cualquier momento, si es necesario.
- Comience el experimento formal una vez que los participantes hayan completado la sesión de práctica y puedan mantener una distancia de seguimiento estable.
- Comience la sesión experimental formal, que consta de un total de cuatro bloques (es decir, dedo, muñeca, sien y solo conducción) con 13 eventos de frenado aleatorios en cada bloque, lo que resulta en un total de 52 ensayos experimentales. El orden de las condiciones se contrarresta con el diseño de la plaza latina. No se proporciona ninguna solicitud de voz en los juicios formales.
- Ayude a los participantes a ponerse el kit de herramientas vibratorias usando cinta médica antes de cada bloque de ensayos de acuerdo con las condiciones asignadas. El kit de herramientas vibratorio (si está desgastado) advierte a los participantes que frenen cuando el vehículo delantero está frenando. Las luces traseras del vehículo delantero se iluminan cada vez que el vehículo delantero frena.
- Asegúrese de que los participantes reciban un descanso de 2 minutos al completar cada bloque para reducir los efectos de arrastre.
- Pida a los participantes su ubicación preferida para el kit de herramientas vibratorio y la intensidad de vibración percibida con una escala likert de 7 puntos al finalizar todas las pruebas. También se registra la tasa de uso de cada accesorio portátil diario (es decir, reloj, gafas, auriculares y anillo). En la escala de preferencias para la ubicación del kit de herramientas vibratorio, "1" representa "menos favorito" y "7" representa "el más favorito", mientras que en la escala de intensidad de vibración "1" representa "sensación débil" y "7" representa "sensación fuerte".
6. Análisis de datos
- Recoja los datos de comportamiento de conducción de los participantes a 50 Hz utilizando el software de simulación de conducción, incluyendo el tiempo de respuesta de freno, la velocidad del vehículo, la tasa de reversión del volante, la posición del carril (SDLP) y la distancia de avance, etc.
- Realice el análisis de datos del rendimiento de los controladores.
- Realice un análisis atípico utilizando la distribución normal con corte como tres desviaciones estándar de la media para determinar qué datos se incluirán para su posterior análisis.
- Calcule el tiempo de respuesta del freno restando el tiempo en que el vehículo participante frena (es decir, una reducción mínima del 1% del pedal de freno36,42)desde el momento en que el vehículo delantero comienza a frenar.
- Etiquete los datos como "sin respuesta de freno" si el tiempo de respuesta del freno es mayor o igual a 5 s (es decir, una falla en el freno dentro de 5 s después de los frenos del vehículo delantero).
- Divida el número de frenos exitosos por el número total de frenos realizados por el vehículo delantero para calcular la tasa de respuesta de frenos.
- Promedia todos los valores de cada participante para obtener la tasa media de respuesta a los frenos y el tiempo de respuesta a los frenos de cada condición y calcular la desviación estándar en esos valores para análisis posteriores.
Resultados
El estudio ejemplar publicado en este artículo llevó a cabo la tarea de seguimiento del coche utilizando el simulador de conducción y el kit de herramientas vibratorios, que también ha sido publicado previamente en una revista académica22. Cabe destacar que la versión anterior del kit de herramientas vibratorias se utilizó al realizar el estudio ejemplar, mientras que una nueva versión del kit de herramientas vibratorias se introdujo en el protocolo anterior. El estudio fue un experimento ...
Discusión
La plataforma de simulación de conducción y el kit de herramientas vibratorio imitaron razonablemente la aplicación de posibles dispositivos vibrotacitiles portátiles en la vida real, proporcionando una técnica eficaz en la investigación de la investigación relacionada con la conducción. Con el uso de esta tecnología, un entorno experimental seguro con alta capacidad de configuración y asequibilidad ya está disponible para llevar a cabo investigaciones comparables a la conducción en el mundo real.
Divulgaciones
Los autores declararon que no había divulgación financiera ni conflictos de intereses.
Agradecimientos
Este proyecto ha sido patrocinado por la Fundación Beijing Talents.
Materiales
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Referencias
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados