
É necessária uma assinatura da JoVE para visualizar este conteúdo. Faça login ou comece sua avaliação gratuita.
Method Article
Kit de ferramentas vibradores táteis e plataforma de simulação de condução para pesquisa relacionada à condução
Neste Artigo
Erratum Notice
Resumo
Este protocolo descreve uma plataforma de simulação de condução e um kit de ferramentas vibratórias táteis para a investigação de pesquisas relacionadas à condução. Um experimento exemplar explorando a eficácia dos avisos táteis também é apresentado.
Resumo
O sistema de alerta de colisão desempenha um papel fundamental na prevenção de distrações de condução e condução sonoleira. Estudos anteriores comprovaram as vantagens dos avisos táteis na redução do tempo de resposta do freio do motorista. Ao mesmo tempo, os avisos táteis têm se mostrado eficazes na solicitação de tomada (TOR) para veículos parcialmente autônomos.
Como o desempenho dos avisos táteis pode ser otimizado é um tópico de pesquisa quente em andamento neste campo. Assim, os softwares e métodos de simulação de condução de baixo custo apresentados são introduzidos para atrair mais pesquisadores para participar da investigação. O protocolo apresentado foi dividido em cinco seções: 1) participantes, 2) configuração de software de simulação de condução, 3) preparação de simulador de direção, 4) configuração e preparação do kit de ferramentas vibrantes e 5) condução do experimento.
No estudo exemplar, os participantes usaram o kit de ferramentas vibratórias táteis e realizaram uma tarefa estabelecida de seguir o carro usando o software de simulação de condução personalizado. O veículo dianteiro freava intermitentemente, e avisos vibratórios eram emitidos sempre que o veículo dianteiro freava. Os participantes foram instruídos a responder o mais rápido possível aos freios repentinos do veículo dianteiro. A dinâmica de condução, como o tempo de resposta do freio e a taxa de resposta ao freio, foram registradas pelo software de simulação para análise de dados.
O protocolo apresentado oferece insights sobre a exploração da eficácia dos avisos táteis em diferentes locais do corpo. Além da tarefa de seguir o carro que é demonstrada no experimento exemplar, este protocolo também fornece opções para aplicar outros paradigmas aos estudos de simulação de condução, fazendo configuração simples de software sem qualquer desenvolvimento de código. No entanto, é importante notar que devido ao seu preço acessível, o software de simulação de condução e hardware introduzido aqui pode não ser capaz de competir totalmente com outros simuladores de direção comercial de alta fidelidade. No entanto, este protocolo pode funcionar como uma alternativa acessível e fácil de usar para os simuladores de condução comercial de alta fidelidade em geral.
Introdução
De acordo com os dados revelados pelo Global Health Estimates em 2016, o acidente de trânsito é a oitava causa de mortes globais, levando a 1,4 milhão de mortes em todo o mundo1. No ano de 2018, 39,2% dos acidentes de trânsito foram colisões com veículos automotores no transporte, e 7,2% foram colisões traseiras. Uma solução para aumentar a segurança dos veículos e das estradas é o desenvolvimento de um sistema avançado de assistência à condução (ADAS) para alertar os motoristas com potenciais riscos. Os dados mostraram que o ADAS pode reduzir consideravelmente a taxa de colisões traseiras, e é ainda mais eficaz quando equipado com um sistema de freio automático2. Além disso, com o desenvolvimento de veículos autônomos, será necessário menor envolvimento humano para controlar o veículo, tornando necessário um sistema de alerta de retirada (TOR) quando o veículo autônomo não se regular. O design do sistema de alerta ADAS e TOR é agora uma importante peça de tecnologia para os motoristas evitarem acidentes iminentes em poucos segundos. O experimento exemplar usou um kit de ferramentas vibratório, juntamente com uma plataforma de simulação de condução para investigar qual local geraria o melhor resultado quando um sistema de alerta vibrotátil foi usado como um potencial sistema de alerta ADAS e TOR.
Categorizados por canais perceptivos, geralmente existem três tipos de modalidades de alerta, que são visuais, auditivas e táteis. Cada modalidade de advertência tem seus próprios méritos e limitações. Quando os sistemas de alerta visual estão em uso, os motoristas podem sofrer com a sobrecarga visual3,prejudicando o desempenho de condução devido à cegueira desatenção4,5. Embora um sistema de alerta auditivo não influencie o campo visual dos motoristas, sua eficácia depende muito do ambiente, como música de fundo e outros ruídos no ambiente de condução6,7. Assim, situações que contenham outras informações auditivas externas ou ruídos significativos podem levar à surdez desatenção8,9, reduzindo a eficácia de um sistema de alerta auditivo. Em comparação, os sistemas de alerta tátil não competem com o processamento visual ou auditivo dos motoristas. Ao enviar avisos vibrotáis aos motoristas, os sistemas de alerta tátil superam as limitações dos sistemas de alerta visual e auditivo.
Estudos anteriores mostraram que os avisos táteis podem beneficiar os motoristas, encurtando o tempo de resposta do freio. Verificou-se também que os sistemas de alerta táteis produzem um resultado mais efetivo sobre o visual10,11 e auditivo12,13,14 sistemas de alerta em determinadas situações. No entanto, pesquisas limitadas se concentraram em investigar o local ideal para a colocação de um dispositivo de alerta tátil. De acordo com a hipótese do córtex sensorial15 e a hipótese de distância sensorial16,o estudo exemplar escolheu as áreas do dedo, pulso e templo como locais experimentais para a colocação de um dispositivo de alerta tátil. Com o protocolo introduzido, a frequência e o tempo de entrega de um aviso vibratório, e intervalos entre vibrações do kit de ferramentas vibratórias, podem ser configurados para atender aos requisitos experimentais. Este kit de ferramentas vibratório consistia de um chip mestre, um chip regulador de tensão, um multiplexer, um adaptador USB para Transistor-Transistor-Logic (TTL), um Transistor de Efeito de Campo metal-óxido-semicondutor (MOSFET) e um módulo Bluetooth. O número de módulos vibratórios também pode variar de acordo com as necessidades dos pesquisadores, com até quatro módulos vibrando ao mesmo tempo. Ao implementar o kit de ferramentas vibratório nos experimentos relacionados à condução, ele pode ser configurado para se adequar às configurações experimentais, bem como sincronizado com dados de desempenho de condução, revisando os códigos da simulação de condução.
Enquanto para os pesquisadores, a realização de um experimento de condução em uma plataforma virtual é mais viável do que no mundo real devido ao risco e custo envolvidos. Por exemplo, a coleta de indicadores de desempenho pode ser difícil, e é difícil controlar os fatores ambientais envolvidos quando experimentos estão sendo conduzidos no mundo real. Como resultado, muitos estudos têm usado simuladores de direção de base fixa rodando em PCs nos últimos anos como alternativa para realizar estudos de condução em estrada. Depois de aprender, desenvolver e pesquisar por mais de 11 anos na comunidade de pesquisa de condução, estabelecemos uma plataforma de simulação de condução com um carro real que consiste em um software de simulação de condução de código aberto e um kit de hardware, incluindo um volante e caixa de velocidades, três pedais, três projetores montados e três telas de projetor. Com o software de simulação de condução suportando apenas uma única tela, o protocolo apresentado usou apenas o projetor central e a tela do projetor para realizar o experimento.
Existem duas grandes vantagens de usar a plataforma de simulação de condução apresentada. Uma vantagem desta plataforma é que ela usa um software de código aberto. Usando a plataforma de código aberto fácil de usar, os pesquisadores podem personalizar o kit de ferramentas de simulação e vibração para suas necessidades de pesquisa exclusivas, fazendo uma configuração de software simples sem qualquer desenvolvimento de código . Ao revisar os códigos, os pesquisadores podem criar simulações de condução que fornecem fidelidade relativa à realidade com muitas opções disponíveis em tipos de carros, tipos de estrada, resistência ao volante, turbulência de vento lateral e longitudinal, interfaces de programa de aplicativos de eventos de tempo e freio (APIs) para sincronização de software externo e implementação dos paradigmas comportamentais, como tarefa de seguir carro e tarefa N-Back. Embora a realização de pesquisas relacionadas à condução em um simulador de direção não possa replicar totalmente a condução no mundo real, os dados coletados através de um simulador de direção são razoáveis e têm sido amplamente adotados pelos pesquisadores17,18.
Outra vantagem do simulador de direção proposto é o seu baixo custo. Como mencionado anteriormente, o software de simulação de condução introduzido é um software de código aberto que está disponível gratuitamente para os usuários. Além disso, o custo total de toda a configuração de hardware neste protocolo é menor se comparado aos simuladores típicos de direção comercial de alta fidelidade. Os números 1 a e b mostram a configuração completa de dois simuladores de direção com o custo que varia de US$ 3.000 a US$ 3.000. Em contraste, simuladores típicos de direção comercial de alta fidelidade (base fixa) geralmente custam em torno de US $ 10.000 a US $ 100.000. Com seu preço altamente acessível, este simulador de direção pode ser uma escolha popular não apenas para fins de pesquisa acadêmica, mas também para a realização de aulas de direção19 e para demonstração de tecnologias relacionadas à condução20,21.

Figura 1: Uma imagem dos simuladores de direção. Ambos os simuladores de direção consistiam em um volante e caixa de câmbio, três pedais e um veículo. a Uma configuração de simulador de direção de US$ 3.000 que usou uma tela LCD de 80 polegadas com uma resolução de 3840 × 2160. (b) Uma configuração de simulador de direção de US$ 3.0000 que utilizou três projetores montados e três telas de projetor com uma dimensão de 223 x 126 cm cada. As telas de projeção foram colocadas 60 cm acima do solo e 22 cm de distância da frente do veículo. Apenas o projetor central e a tela do projetor foram usados para o experimento atual. Clique aqui para ver uma versão maior desta figura.
{kind=link}
O software de simulação de condução e o kit de ferramentas vibratórios no método proposto já foram utilizados em estudos anteriores por nossos pesquisadores22,23,24,25,26,27,28,29. Este kit de ferramentas vibratórias auto-desenvolvido seguindo o padrão ISO30 pode ser aplicado em diferentes campos31,32 ajustando a frequência e intensidade de vibração. É importante notar que uma versão mais recente do kit de ferramentas vibratória foi desenvolvida e é introduzida no protocolo a seguir. Em vez de ajustar a frequência de vibração usando um adaptador de tensão ajustável, a versão mais recente é equipada com cinco frequências de vibração diferentes e pode ser mais fácil de ajustar usando os códigos fornecidos no Arquivo de Codificação Suplementar 1. Além disso, o simulador de direção apresentado fornece aos pesquisadores uma maneira segura, barata e eficaz de investigar vários tipos de pesquisas relacionadas à condução. Assim, este protocolo é adequado para laboratórios de pesquisa que têm um orçamento limitado e têm uma forte necessidade de personalizar ambientes experimentais de condução.
Protocolo
NOTA: Todos os métodos aqui descritos foram aprovados pelo Conselho de Revisão Institucional (IRB) da Universidade de Tsinghua e o consentimento informado foi obtido de todos os participantes.
1. Participantes
- Realize uma análise de poder para calcular o número necessário de participantes para recrutamento de acordo com o projeto experimental para alcançar o poder estatístico.
- Equilibrar o sexo dos participantes durante o recrutamento tanto quanto possível.
- Certifique-se de que os participantes tenham uma carteira de motorista válida e pelo menos um ano de experiência de condução.
- Certifique-se de que os participantes tenham visão normal ou corrigida usando o gráfico de visão.
- Certifique-se de que os participantes não consumiram álcool ou drogas que afetam as habilidades de condução dentro de 24 horas antes do experimento33.
2. Configuração do software de simulação de condução
- Digite a pasta do software de simulação de condução, seguido pela pasta Runtime e pela pasta Config. Em seguida, abra o arquivo "expconfig.txt" (ou seja, o caminho do arquivo deve ser "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\").
- Determine se deve aplicar qualquer configuração ou prosseguir com a simulação de condução usando as configurações padrão sem qualquer configuração recém-saída da caixa, referindo-se ao design experimental. A Tabela 1 mostra uma descrição detalhada das configurações padrão de todas as opções disponíveis.
- Prossiga para a Seção 3 do protocolo se não forem feitas alterações.
| Opções configuráveis | Descrições | Configurações padrão |
| endExpByTime | Usar ou não o relógio como gatilho para acabar com o experimento. | False |
| endExpAfterMinute | Termine a experiência depois desses minutos. | 10 |
| endExpByDist | Usar ou não o carro do motorista viajou distância como gatilho para encerrar o experimento. Quando os gatilhos de tempo e distância forem usados, termine o experimento com o que ocorre primeiro. | False |
| endExpAfterMeter | Termine o experimento depois que esses medidores tiverem sido percorridos desde a linha de partida. | 5000 |
| habilitarRandomFrontalWind | Seja para permitir o vento frontal, (ou seja, uma força empurrando o carro para a direção traseira) com intervalo e duração aleatórios. | Verdade |
| frontalWindIntervalMin | Valor mínimo (segundos) do intervalo do vento frontal. | 3 |
| frontalWindIntervalMax | Valor máximo (segundos) do intervalo do vento frontal. | 13 |
| frontalWindDurationMin | Valor mínimo (segundos) da duração do vento frontal. | 2 |
| frontalWindDurationMax | Valor máximo (segundos) da duração do vento frontal. | 3 |
| frontalWindForceMin | Valor mínimo (newton) da força do vento frontal. | 500 |
| frontalWindForceMax | Valor máximo (newton) da força do vento frontal. | 1000 |
| habilitarRandomLateralWind | Seja para permitir o vento lateral (ou seja, uma força empurrando o carro para a direção esquerda ou direita) com intervalo e duração aleatórios. | Verdade |
| lateralWindIntervalMin | Valor mínimo (segundos) do intervalo de vento lateral. | 3 |
| lateralWindIntervalMax | Valor máximo (segundos) do intervalo de vento lateral. | 8 |
| lateralWindDurationMin | Valor mínimo (segundos) da duração do vento lateral. | 2 |
| lateralWindDurationMax | Valor máximo (segundos) da duração do vento lateral. | 3 |
| lateralWindForceMin | Valor mínimo (newton) da força eólica lateral. | 1000 |
| lateralWindForceMax | Valor máximo (newton) da força eólica lateral. | 2000 |
| leadCarConstantSpeedMPH | Velocidade constante do veículo de chumbo (mph). | 40 |
| leadDistToStartWaiting | O veículo de chumbo começará a esperar pelo veículo do motorista quando a distância (metros) entre a cauda do veículo líder e a cabeça do veículo do motorista for maior do que o número indicado. | 100 |
| leadDistToStopSesso | O carro líder vai esperar até que a distância (metros) à frente do carro do motorista seja menor do que este número. | 80 |
| leadCarBrakeIntervalTimeMin | Intervalo de tempo aleatório mínimo (segundos) para o veículo de chumbo frear. | 30 |
| leadCarBrakeIntervalTimeMax | Intervalo de tempo aleatório máximo (segundos) para o veículo de chumbo frear. | 60 |
| leadCarBrakeEventDuration | Duração do evento de freio do veículo de chumbo (segundos). | 5 |
| habilitarRandomSMSSound | Se ativar o som de notificação do servidor de mensagens curtas reproduzido com intervalos aleatórios. | False |
| randSMSIntervalMin | Intervalo de tempo aleatório mínimo (segundos) desde o início da primeira notificação de SMS até o início da segunda notificação de SMS. | 2 |
| randSMSIntervalMax | Intervalo de tempo aleatório máximo (segundos) desde o início da primeira notificação de SMS até o início da segunda notificação de SMS. | 2 |
| habilitarRandomNbackSound | Se ativar o som do número N-back é reproduzido com intervalos aleatórios. | False |
| randNbackIntervalMin | Intervalo de tempo aleatório mínimo (segundos) desde o início do primeiro som até o início do segundo som. | 2.33 |
| randNbackIntervalMax | Intervalo de tempo aleatório máximo (segundos) desde o início do primeiro som até o início do segundo som. | 2.33 |
| habilitarUDPSendData | Se ativar a sincronização de dados de carimbo de tempo para um IP de rede local específico. | False |
| habilitarUDPSendDataAdStudy | Se permitir que os dados sejam enviados para o seguinte IP para o estudo de anúncio. Nota: Conflito com enableUDPSendData. | False |
| UDPTargetIPa1 | Endereço IP para a transferência UDP | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | Porta UDP alvo. | 1234 |
| UDPcycleNumber | Controle com que frequência o carimbo de hora é enviado. Os dados serão enviados após cada UDPcycleNumber de ciclos TORCS com cada ciclo é geralmente de 20 ms. | 1 |
| habilitaçãoUDPQNConnection | Se ativar ou não a simulação de unidade de modelo QN-Java com o servidor UDP e o cliente são o mesmo computador. | False |
| UDPQNtoTORCSPort | A porta UDP QN para o número da porta de simulação. | 5678 |
| UDPTORCStoQNPort | A porta de simulação para o número da porta UDP QN. | 8765 |
| leadCarBrakingByWebCommand | Se conectar a um site para o sinal de frenagem do veículo líder. | False |
| Far_Point_Time_Ahead | O parâmetro usado no modelo de controle do veículo. | 2 |
| habilitarCarFollowingTraining | Ativar ou não a tarefa simulada de seguir o carro no modo de treinamento. | / |
| carFollowingTrainingWarningInterval | Intervalo de tempo desde o último início sonoro de aviso até o próximo início sonoro de aviso do modo de treinamento. | 2 |
Tabela 1: Lista de configurações padrão para o software de simulação de condução. Uma lista dos valores padrão de todas as opções configuráveis associadas do software de simulação de condução, juntamente com uma descrição detalhada de cada opção.
- Configure as configurações sobre como terminar o experimento com base na variável de controle decidida do design experimental.
- Decida se deve usar o relógio como um gatilho para terminar o experimento com a opção "endExpByTime =" usando o True ou o False como escolha de opções. Defina esta opção como False para replicar o estudo exemplar.
- Selecione se deve terminar o experimento com o tempo percorrido como um gatilho com a opção "endExpAfterMinute =" inserindo o número de minutos no formato com um lugar decimal. O tempo percorrido pode ser decidido inteiramente pelos pesquisadores. Entrada 12 para replicar o estudo exemplar.
- Defina se deve terminar o experimento com a distância percorrida como um gatilho com a opção "endExpByDist =" usando o True ou o False como escolha de opções. Observe que quando ambas as opções "endExpByTime =" e "endExpByDist =" forem definidas como True, o experimento terminará com a condição que é atendida primeiro. Defina esta opção para True para replicar o estudo exemplar.
- Use a opção "endExpAfterMeter =" para definir a distância percorrida da linha de partida em metros no formato com um lugar decimal. A distância percorrida pode ser decidida inteiramente pelos pesquisadores. Insumo 10000.0 para replicar o estudo exemplar.
- Configure as configurações de vento para o ambiente de condução simulada de acordo com a velocidade do vento34,35 projetada para o ambiente virtual e a carga cognitiva36 a ser iniciada no experimento.
- Defina se ativar o vento frontal com intervalo e duração aleatórios com a opção "enableRandomFrontalWind =" usando True ou False como escolha de opções. Defina esta opção para True para replicar o estudo exemplar.
- Defina o intervalo de vento frontal mínimo e máximo com as opções "frontalWindIntervalMin =" e "frontalWindIntervalMax =" inserindo o número de segundos no formato com um lugar decimal, respectivamente. Use a configuração padrão (ou seja, 3.0 e 13.0, respectivamente) para replicar o estudo exemplar.
- Defina a duração mínima e máxima do vento frontal com as opções "frontalWindDurationMin =" e "frontalWindDurationMax =" inserindo o número de segundos no formato com um lugar decimal, respectivamente. Use a configuração padrão (ou seja, 2.0 e 3.0, respectivamente) para replicar o estudo exemplar.
- Defina a força mínima e máxima do vento frontal com as opções "frontalWindForceMin =" e "frontalWindForceMax =" indicando a quantidade de força em newton, respectivamente. Use a configuração padrão (ou seja, 500,0 e 1.000,0, respectivamente) para replicar o estudo exemplar.
- Escolha se habilita o vento lateral com intervalo e duração aleatórios com a opção "enableRandomLateralWind =" usando True ou False como escolha de opções. Definido como True para replicar o estudo exemplar.
- Defina o intervalo mínimo e máximo de força de vento lateral com as opções "lateralWindIntervalMin =" e "lateralWindIntervalMax =" inserindo o número de segundos no formato com um lugar decimal, respectivamente. Use a configuração padrão (ou seja, 3.0 e 8.0, respectivamente) para replicar o estudo exemplar.
- Defina a duração mínima e máxima do vento lateral com as opções "lateralWindDurationMin =" e "lateralWindDurationMax =" inserindo o número de segundos no formato com um lugar decimal, respectivamente. Use a configuração padrão (ou seja, 2.0 e 3.0, respectivamente) para replicar o estudo exemplar.
- Defina a força mínima e máxima do vento lateral com as opções "lateralWindForceMin =" e "lateralWindForceMax =" indicando a quantidade de força em newton, respectivamente. Use a configuração padrão (ou seja, 1.000,0 e 2.000,0, respectivamente) para replicar o estudo exemplar.
- Configure as configurações para a tarefa simulada de seguir o carro de acordo com o design experimental e precisade 35.
- Defina a velocidade constante do veículo de chumbo em milhas por hora com um lugar decimal usando a opção "leadCarConstantSpeedMPH =". Entrada 40 para replicar o estudo exemplar.
- Defina a distância em metros com um lugar decimal entre o veículo líder e o veículo do motorista para acionar o veículo de chumbo para começar a esperar que o veículo do motorista se atualize, ou para retomar a condução, com as opções "leadDistToStartWaiting =" e " leadDistToStopWaiting =", respectivamente. Use a configuração padrão (ou seja, 100,0 e 80,0, respectivamente) para replicar o estudo exemplar.
- Defina o intervalo de tempo aleatório máximo e mínimo dos eventos de freio do veículo líder com as opções "leadCarBrakeIntervalTimeMin =" e "leadCarBrakeIntervalTimeMax= " inserindo o número de segundos no formato com um lugar decimal (por exemplo, 30,0 e 60,0), respectivamente. Use a configuração padrão (ou seja, 30,0 e 60,0, respectivamente) para replicar o estudo exemplar.
- Defina a duração do evento de freio com a opção "leadCarBrakeEventDuration =" digitando o número de segundos no formato com um lugar decimal. Use a configuração padrão (ou seja, 5.0) para replicar o estudo exemplar.
- Configure as configurações para um som aleatório de notificação de mensagens curtas de acordo com o design experimental e as necessidades.
- Decida se ativar a notificação de serviço de mensagem curta (SMS) soa reproduzido com intervalos aleatórios com True ou False como a escolha de opções para a opção "enableRandomSMSSound =". Defina a opção de False para replicar o estudo exemplar.
- Defina o intervalo de tempo mínimo e máximo desde o início da primeira notificação de SMS até o início da segunda notificação de SMS usando as opções "randSMSIntervalMin =" e "randSMSIntervalMax=", indicando o número de segundos no formato com um lugar decimal (por exemplo, 5,0 e 10,0) respectivamente.
- Configure as configurações para a tarefa N-back simulada37 de acordo com o design experimental e as necessidades.
- Definir sons de número N-back para reproduzir com intervalos aleatórios com True ou False como a escolha de opções para a opção "enableRandomNbackSound =". Defina a opção de False para replicar o estudo exemplar.
- Defina o intervalo de tempo mínimo e máximo desde o deslocamento do primeiro som até o início do segundo som usando as opções "randNbackIntervalMin =" e "randNbackIntervalMax=" para indicar o número de segundos no formato com um lugar decimal (por exemplo, 5,0 e 10,0), respectivamente.
- Configure as configurações UDP (User Datagram Protocol, protocolo de datagrama do usuário) se uma transferência de dados UDP for necessária para o experimento.
- Decida se habilita o UDP para transferência de dados, permitindo a sincronização de dados de carimbo de tempo para um endereço IP de rede local específico através da opção "enableUDPSendData =" usando True ou False como escolha de opções. Habilite esta opção para replicar o estudo exemplar.
- Selecione se habilita o UDP para transferência de dados para um endereço IP específico para um estudo de anúncio através da opção "enableUDPSendDataAdStudy =" usando True ou False como escolha de opções. Também é lembrado que essa opção está em conflito com o "enableUDPSendData =" e ambas as opções não podem ser definidas como True ao mesmo tempo. Defina a opção de False para replicar o estudo exemplar.
- Defina o endereço IP para a transferência UDP especificando cada seção do endereço IP usando "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" e "UDPTargetIPa4 =".
- Indicar o número da porta de destino em "UDPTargetPort =".
- Defina a frequência para que os dados sejam enviados em "UDPcycleNumber =" com qualquer inteiro maior ou igual ao ciclo "1" no qual, cada ciclo é de 20 ms.
- Configure a conexão modelo38 da rede de filas UDP (QN) com referência ao design experimental e às necessidades.
- Defina se habilita ou não a simulação de unidade de modelo QN-Java na qual, o servidor E o cliente do UDP estão compartilhando o mesmo computador, com a opção "enableUDPQNConnection =" usando True ou False como escolha de opções. Desabilite esta opção para replicar o estudo exemplar.
- Indique o número da porta UDP QN para a porta de simulação sob a opção "UDPQNtoTORCSPort =".
- Indique o número da porta de simulação para a porta UDP QN sob a opção "UDPTORCStoQNPort =".
- Configure se deve se conectar a um site para sinais de frenagem de acordo com o design experimental sob a opção "leadCarBrakingByWebCommand =" usando True ou False como escolha de opções. Observe que quando esta opção estiver definida como True, o "endExpByTime =" e "endExpAfterMinute =" pararão de funcionar. Defina a opção de False para replicar o estudo exemplar.
- Defina se ativará a tarefa simulada de seguir o carro no modo de treinamento com o "enableCarFollowingTraining =" usando True ou False como escolha de opções.
- Defina o intervalo desde o último início do som de aviso até o próximo início sonoro de aviso do treinamento com a opção "carFollowingTrainingWarningInterval =" indicando o número de segundos com um lugar decimal (por exemplo, 2.0).
- Salve o arquivo ao completar a configuração.
3. Preparação para simulador de direção
- Conecte o volante e o projetor central (um projetor montado com uma proporção de 16:10, 192 – 240 Hz de atualização e processamento de cores de 8 bits) ao computador. Uma tela de projetor com uma dimensão de 223 x 126 cm foi colocada 60 cm acima do solo e 22 cm de distância da frente do veículo instrumentado.
- Defina a resolução da tela em Opções | Display, para corresponder ao tamanho da tela ao iniciar o software de simulação de condução.
- Digite a página Configurar para selecionar um jogador e siga as instruções fornecidas pelo software para calibrar o volante, acelerador e pedal de freio. Estes incluem girar o volante e pressionar o acelerador e o pedal de freio como instruído.
4. Configuração e preparação do kit de ferramentas vibratórios
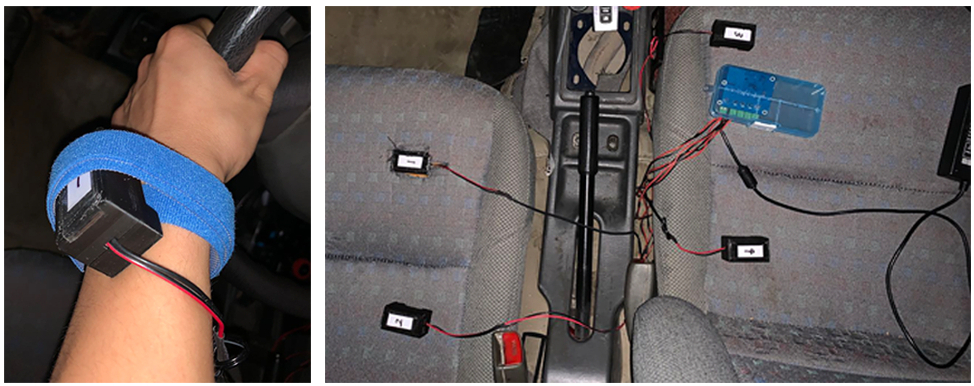
- Conecte o kit de ferramentas vibratórias à fonte de alimentação. Cada um dos quatro módulos tem uma dimensão de 67 x 57 x 29 mm. A Figura 2 mostra uma imagem do kit de ferramentas vibratórios.

Figura 2: Imagens do kit de ferramentas vibratórios. O kit de ferramentas vibratório consistia de quatro módulos individuais que podem ser ativados separadamente. Cada módulo tem uma dimensão de 67 x 57 x 29 mm. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Ligue o kit de ferramentas vibratório e conecte o kit de ferramentas ao computador via Bluetooth.
- Defina a frequência de vibração a ser usada para o experimento ao completar um teste piloto de sensibilidade à pele ou de acordo com as necessidades experimentais.
- Defina a frequência de vibração para 70 Hz39,40,41 usando os códigos fornecidos como Arquivo de Codificação Suplementar 1. Um total de cinco níveis de frequência (ou seja, 14Hz, 28Hz, 42Hz, 56Hz e 70Hz) estão atualmente disponíveis com cada estimulação de vibração que dura 0,5 s por padrão.
- Use os códigos fornecidos como Arquivo de Codificação Suplementar 1 para sincronizar os eventos de freio do software de simulação de condução e do kit de ferramentas vibratórios. A Figura 3 mostra uma captura de tela rotulada dos códigos a serem revisados como referência.

Figura 3: Uma captura de tela rotulada dos códigos em Arquivo de Codificação Suplementar 1. A captura de tela rotulada de códigos pode ser usada como uma referência mais fácil para a configuração e preparação do kit de ferramentas vibratórios. Esses códigos são usados para definir a frequência de vibração do kit de ferramentas e para sincronizar os eventos de freio no software de simulação de condução e kit de ferramentas vibratórias para gerar avisos vibratórios. Clique aqui para ver uma versão maior desta figura.
{kind=link}
5. Realização do experimento
- Instrua os participantes a ler e assinar o termo de consentimento livre e esclarecido que introduz o processo experimental e declarar que o estudo deve avaliar o desempenho da condução na chegada ao laboratório.
- Ajude os participantes a ajustar a distância do assento ao pedal e definir o encosto para uma posição confortável manualmente.
- Ensine aos participantes como operar o simulador, incluindo o volante, pedal de freio e pedal do acelerador.
- Instrua os participantes a dirigir como fariam no mundo real, seguindo o carro na frente deles e mantendo um avanço de dois segundos atrás dele. A Figura 4 mostra o roteiro usado para a simulação de condução.

Figura 4: Mapa de estrada usado para simulação de condução. A estrada utilizada é uma estrada de mão única com quatro curvas (comprimento máximo de 15.000 metros), três pistas e sem semáforos. O software de simulador de direção oferece outras opções de design de estrada, como opções para incluir placas de trânsito ou outdoors. Uma versão compatível com EEG também está disponível. Todos esses parâmetros podem ser ajustados, se necessário. Clique aqui para ver uma versão maior desta figura.
{kind=link}
- Informe os participantes a frear o mais rápido possível sempre que o veículo dianteiro frear, mesmo que o cenário não exija uma resposta ao freio. As lanternas traseiras do veículo dianteiro acenderão de acordo com a condução do mundo real para indicar um evento de freio.
- Forneça aos participantes um teste prático de 5 minutos para aprender a manter uma distância de avanço de dois segundos atrás do veículo dianteiro. O ensaio prático inclui um conjunto de 5 freios aleatórios.
- Durante o teste prático, se os participantes estiverem menos de 1,5 s atrás do veículo dianteiro, o software de simulação de condução reproduzirá um prompt com uma voz feminina "muito perto, por favor, desacelere".
- Se os participantes estiverem entre 2,25 e 2,5 s atrás do veículo dianteiro, o software de simulação de condução reproduzirá um prompt com uma voz feminina "muito longe, por favor acelere".
- Não inclua dados do ensaio prático para a análise.
- Informar os participantes que o estudo pode ser interrompido sem qualquer penalidade, notificando os experimentadores a qualquer momento, se necessário.
- Inicie o experimento formal assim que os participantes tiverem concluído a sessão prática e possam manter uma distância estável após a distância.
- Inicie a sessão experimental formal, que consiste em um total de quatro blocos (ou seja, dedo, pulso, templo e somente condução) com 13 eventos aleatórios de frenagem em cada bloco, resultando em um total de 52 ensaios experimentais. A ordem das condições é contrabalançada com o design da praça latina. Nenhuma voz é fornecida nos julgamentos formais.
- Ajude os participantes a colocar o kit de ferramentas vibratórios usando fita médica antes de cada bloco de ensaios de acordo com as condições atribuídas. O kit de ferramentas vibratório (se usado) adverte os participantes a frear quando o veículo dianteiro está freando. As lanternas traseiras do veículo dianteiro são iluminadas toda vez que o veículo dianteiro freia.
- Certifique-se de que os participantes recebam um descanso de 2 minutos após a conclusão de cada bloco para reduzir os efeitos de transferência.
- Pergunte aos participantes sua localização preferida para o kit de ferramentas vibratório e a intensidade de vibração percebida com uma escala likert de 7 pontos após a conclusão de todos os ensaios. A taxa de uso de cada acessórios vestíveis diários (ou seja, relógio, óculos, fones de ouvido e anel) também é registrada. Na escala de preferência para a localização do kit de ferramentas vibratório, "1" representa "menos favorito" e "7" representa "o mais favorito", enquanto na escala de intensidade de vibração "1" representa "sentimento fraco" e "7" representa "sentimento forte".
6. Análise de dados
- Colete os dados de comportamento de condução dos participantes a 50 Hz usando o software de simulação de condução, incluindo o tempo de resposta do freio, velocidade do veículo, taxa de inversão do volante, posição de faixa (SDLP) e distância de avanço, etc.
- Realize a análise dos dados do desempenho dos motoristas.
- Realize uma análise outlier utilizando a distribuição normal com corte como três desvios padrão da média para determinar quais dados devem ser incluídos para análise posterior.
- Calcule o tempo de resposta do freio subtraindo o tempo em que o veículo participante freia (ou seja, uma redução mínima de 1% do pedal do freio36,42) a partir do momento em que o veículo dianteiro começa a frear.
- Rotule os dados como "sem resposta ao freio" se o tempo de resposta do freio for maior ou igual a 5 s (ou seja, uma falha no freio dentro de 5 s após os freios do veículo dianteiro).
- Divida o número de freios bem sucedidos pelo número total de freios realizados pelo veículo dianteiro para calcular a taxa de resposta ao freio.
- Média de todos os valores de cada participante para obter a taxa média de resposta do freio e o tempo de resposta do freio de cada condição e calcular o desvio padrão sobre esses valores para análises posteriores.
Resultados
O estudo exemplar relatado neste artigo conduziu a tarefa de seguir o carro utilizando o simulador de direção e o kit de ferramentas vibrantes, que também foi publicado anteriormente em uma revista acadêmica22. Vale ressaltar que a versão mais antiga do kit de ferramentas vibratórias foi usada na condução do estudo exemplar, enquanto uma nova versão do kit de ferramentas vibratórias foi introduzida no protocolo acima. O estudo foi um experimento de design de dentro do assunto com localiz...
Discussão
A plataforma de simulação de condução e o kit de ferramentas vibratórios imitavam razoavelmente a aplicação de potenciais dispositivos vibrotactile vestíveis na vida real, fornecendo uma técnica eficaz na investigação de pesquisas relacionadas à condução. Com o uso dessa tecnologia, um ambiente experimental seguro com alta configurabilidade e acessibilidade está agora disponível para a realização de pesquisas comparáveis à condução do mundo real.
Existem vários passos qu...
Divulgações
Os autores declararam não divulgação financeira ou conflitos de interesse.
Agradecimentos
Este projeto foi patrocinado pela Beijing Talents Foundation.
Materiais
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Referências
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados