Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
Sürüşle İlgili Araştırmalar için Dokunsal Titreşimli Araç Seti ve Sürüş Simülasyon Platformu
Bu Makalede
Özet
Bu protokol, sürüşle ilgili araştırmaların araştırılması için bir sürüş simülasyon platformu ve dokunsal titreşimli bir araç setini açıklar. Dokunsal uyarıların etkinliğini araştıran örnek bir deney de sunulmaktadır.
Özet
Çarpışma uyarı sistemi, dikkat dağıtıcı unsurların ve uykulu sürüşün önlenmesinde önemli bir rol oynar. Önceki çalışmalar, sürücünün fren tepki süresini azaltmada dokunsal uyarıların avantajlarını kanıtlamıştır. Aynı zamanda, dokunsal uyarıların kısmen otonom araçlar için devralma talebinde (TOR) etkili olduğu kanıtlanmıştır.
Dokunsal uyarıların performansının nasıl optimize edilebileceği bu alanda devam eden bir sıcak araştırma konusudur. Böylece, sunulan düşük maliyetli sürüş simülasyon yazılımı ve yöntemleri, daha fazla araştırmacıyı soruşturmaya katılmaya çekmek için tanıtılır. Sunulan protokol beş bölüme ayrılmıştır: 1) katılımcılar, 2) sürüş simülasyon yazılımı yapılandırması, 3) sürüş simülatörü hazırlama, 4) titreşimli araç seti yapılandırması ve hazırlanması ve 5) deneyi yürütmek.
Örnek çalışmada, katılımcılar dokunsal titreşimli araç setini giydiler ve özelleştirilmiş sürüş simülasyon yazılımını kullanarak yerleşik bir araba takip görevi gerçekleştirdiler. Ön araç aralıklı olarak fren yaptı ve ön araç fren yaptığı zaman titreşimli uyarılar yapıldı. Katılımcılara ön aracın ani frenlerine mümkün olduğunca çabuk cevap vermeleri talimatı verildi. Fren tepki süresi ve fren tepki hızı gibi sürüş dinamikleri, veri analizi için simülasyon yazılımı tarafından kaydedildi.
Sunulan protokol, dokunsal uyarıların farklı vücut konumlarındaki etkinliğinin araştırılması hakkında fikir sunmaktadır. Örnek deneyde gösterilen araç takip görevine ek olarak, bu protokol herhangi bir kod geliştirme olmadan basit yazılım yapılandırması yaparak sürüş simülasyonu çalışmalarına diğer paradigmaları uygulama seçenekleri de sağlar. Bununla birlikte, uygun fiyatı nedeniyle, burada tanıtılan sürüş simülasyon yazılımı ve donanımının diğer yüksek kaliteli ticari sürüş simülatörleriyle tam olarak rekabet edemeyebileceğini belirtmek önemlidir. Bununla birlikte, bu protokol genel yüksek kaliteli ticari sürüş simülatörlerine uygun fiyatlı ve kullanıcı dostu bir alternatif olarak hareket edebilir.
Giriş
2016 yılında Küresel Sağlık Tahminleri tarafından ortaya çıkan verilere göre, trafik yaralanması küresel ölümlerin sekizinci nedenidir ve dünya çapında 1,4 milyon ölüme yol açan1. 2018 yılında trafik kazalarının %39,2'sini ulaşımda motorlu kara taşıtları, %7,2'sini ise arkadan çarpmalar meydana aldı. Araç ve yol güvenliğini artırmak için bir çözüm, potansiyel tehlikeleri olan sürücüleri uyarmak için gelişmiş bir sürüş destek sisteminin (ADAS) geliştirilmesidir. Veriler, ADAS'ın arkadan çarpma oranını büyük ölçüde azaltabileceğini ve bir otomatik fren sistemi ile donatıldığında daha da etkili olduğunugöstermiştir 2. Buna ek olarak, otonom araçların geliştirilmesiyle, aracı kontrol etmek için daha az insan katılımı gerekecek ve otonom araç kendini düzenleyemediğinde devralma talebi (TOR) uyarı sistemini bir gereklilik haline getirecektir. ADAS ve TOR uyarı sisteminin tasarımı artık sürücülerin birkaç saniye içinde yakın kazalardan kaçınmaları için önemli bir teknoloji parçası. Örnek deney, potansiyel bir ADAS ve TOR uyarı sistemi olarak vibrotactile uyarı sistemi kullanıldığında hangi konumun en iyi sonucu vereceğini araştırmak için bir sürüş simülasyon platformu ile birlikte titreşimli bir araç seti kullandı.
Algısal kanallara göre kategorize edilen, genellikle görsel, işitsel ve dokunsal olmak üzere üç tür uyarı yöntemi vardır. Her uyarı modalitesinin kendi yararları ve sınırlamaları vardır. Görsel uyarı sistemleri kullanımdayken, sürücüler görsel aşırı yüklenmeden muzdarip olabilir3, dikkatsiz körlük nedeniyle sürüş performanslarını bozar4,5. İşitsel bir uyarı sistemi sürücülerin görsel alanını etkilemese de, etkinliği büyük ölçüde arka plan müziği ve sürüş ortamındaki diğer sesler gibi çevreye bağlıdır6,7. Bu nedenle, diğer dış işitsel bilgileri veya önemli gürültüyü içeren durumlar dikkatsiz sağırlığa yol açabilir8,9, işitsel uyarı sisteminin etkinliğini azaltabilir. Buna karşılık, dokunsal uyarı sistemleri sürücülerin görsel veya işitsel işlemleriyle rekabet etmez. Dokunsal uyarı sistemleri, sürücülere vibrotactile uyarıları göndererek görsel ve işitsel uyarı sistemlerinin sınırlamalarını aşıyor.
Önceki çalışmalar, dokunsal uyarıların fren tepki sürelerini kısaltarak sürücülere fayda sağlayabileceğini göstermiştir. Dokunsal uyarı sistemlerinin belirli durumlarda görsel10 , 11ve işitsel12 ,13,14uyarı sistemleri üzerinde daha etkili bir sonuç verdiği de tespit edildi. Bununla birlikte, sınırlı araştırmalar dokunsal bir uyarı cihazı yerleştirmek için en uygun yeri araştırmaya odaklanmıştır. Duyusal korteks hipotezi15 ve duyusal mesafe hipotezi16'ya göre, örnek çalışma dokunsal bir uyarı cihazı yerleştirmek için deneysel yerler olarak parmak, bilek ve şakak alanlarını seçti. Sunulan protokol ile titreşimli bir uyarının frekansı ve teslim süresi ve titreşimli takım setinin titreşimleri arasındaki aralıklar deneysel gereksinimlere uyacak şekilde yapılandırılabilir. Bu titreşimli araç seti bir ana çip, bir voltaj regülatör çipi, bir çoklayıcı, bir USB -Transistör-Mantık (TTL) adaptörü, bir Metal-Oksit-Yarı İletken Alan-Efektli Transistör (MOSFET) ve bir Bluetooth modülünden oluşuyordu. Titreşimli modüllerin sayısı da araştırmacıların ihtiyaçlarına göre değişebilir ve aynı anda dört modül titreşebilir. Titreşimli araç setini sürüşle ilgili deneylerde uygularken, deneysel ayarlara uyacak şekilde yapılandırılabilir ve sürüş simülasyonunun kodları revize edilerek sürüş performansı verileriyle senkronize edilebilir.
Araştırmacılar için, sanal bir platformda bir sürüş deneyi yapmak, ilgili risk ve maliyet nedeniyle gerçek dünyada olduğundan daha mümkündür. Örneğin, performans göstergelerini toplamak zor olabilir ve gerçek dünyada deneyler yapılırken ilgili çevresel faktörleri kontrol etmek zordur. Sonuç olarak, birçok çalışma son yıllarda pc'lerde çalışan sabit tabanlı sürüş simülatörlerini yolda sürüş çalışmaları yapmaya alternatif olarak kullanmıştır. Sürüş araştırma topluluğunda 11 yılı aşkın bir süredir öğrendikten, geliştirdikten ve araştırdıktan sonra, açık kaynaklı bir sürüş simülasyon yazılımı ve direksiyon simidi ve şanzıman, üç pedal, üç monte projektör ve üç projektör ekranı içeren bir donanım kitini içeren gerçek bir otomobil ile bir sürüş simülasyon platformu kurduk. Sürüş simülasyon yazılımı sadece tek bir ekranı desteklerken, sunulan protokol deneyi yapmak için yalnızca merkezi projektör ve projektör ekranını kullandı.
Sunulan sürüş simülasyon platformunu kullanmanın iki önemli avantajı vardır. Bu platformun bir avantajı, açık kaynaklı bir yazılım kullanmasıdır. Kullanıcı dostu açık kaynaklı platformu kullanarak, araştırmacılar simülasyon ve titreşimli araç setini benzersiz araştırma ihtiyaçları için herhangi bir kod geliştirme olmadan basit yazılım yapılandırması yaparak özelleştirebilirler. Araştırmacılar, kodları revize ederek, otomobil türleri, yol tipleri, direksiyonun direnci, yanal ve boyuna rüzgar türbülansı, harici yazılım senkronizasyonu için zaman ve fren olayı uygulama programı arayüzleri (API'ler) ve araba takip görevi ve N-Back görevi gibi davranışsal paradigmaların uygulanması konusunda birçok seçenekle gerçeğe göre doğruluğu sağlayan sürüş simülasyonları oluşturabilirler. Bir sürüş simülatöründe sürüşle ilgili araştırmalar yapmak gerçek dünyada sürüşü tam olarak çoğaltamasa da, bir sürüş simülatörü aracılığıyla toplanan veriler makuldür ve araştırmacılar tarafından yaygın olarak benimsenmiştir17,18.
Önerilen sürüş simülatörünün bir başka avantajı da düşük maliyetidir. Daha önce de belirtildiği gibi, tanıtılan sürüş simülasyon yazılımı, kullanıcılara ücretsiz olarak sunulan açık kaynaklı bir yazılımdır. Buna ek olarak, bu protokoldeki tüm donanım kurulumunun toplam maliyeti, tipik yüksek kaliteli ticari sürüş simülatörlerine kıyasla daha düşüktür. Şekil 1 a ve b, maliyeti 3000 ila 30000 $ arasında değişen iki sürüş simülatörünün tam kurulumunu göstermektedir. Buna karşılık, tipik yüksek kaliteli ticari sürüş simülatörleri (sabit tabanlı) genellikle yaklaşık 10.000 ila 100.000 $ 'a mal olur. Son derece uygun fiyatı ile, bu sürüş simülatörü sadece akademik araştırma amaçları için değil, aynı zamanda sürüş sınıfları19 ve sürüş ile ilgili teknolojilerin gösterimi için popüler bir seçim olabilir20,21.

Şekil 1: Sürüş simülatörlerinin bir görüntüsü. Her iki sürüş simülatörü de direksiyon simülatörü ve şanzıman, üç pedal ve bir araçtan oluşuyordu. (a) 3840 × 2160 çözünürlüğe sahip 80 inç LCD ekran kullanan 3000 dolarlık bir sürüş simülatörü kurulumu. (b) Her biri 223 x 126 cm boyuta sahip üç monte projektör ve üç projektör ekranı kullanan 30000 $ sürüş simülatörü kurulumu. Projeksiyon ekranları yerden 60 cm yüksekte ve aracın önünden 22 cm uzağa yerleştirildi. Mevcut deney için sadece merkezi projektör ve projektör ekranı kullanıldı. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Önerilen yöntemdeki sürüş simülasyon yazılımı ve titreşimli araç seti, araştırmacılarımız tarafından önceki çalışmalarda22 , 23 , 24,25,26,27,28,29tarafından zaten kullanılmıştır. ISO standardı30'u takip eden bu kendi geliştirdiği titreşimli takımseti,titreşim frekansı ve yoğunluğu ayarlanarak31,32 farklı alanlarda uygulanabilir. Titreşimli araç setinin daha yeni bir sürümünün geliştirildiğini ve aşağıdaki protokolde tanıtıldığını belirtmek önemlidir. Ayarlanabilir bir voltaj adaptörü kullanarak titreşim frekansını ayarlamak yerine, yeni versiyon beş farklı titreşim frekansı ile donatılmıştır ve Ek Kodlama Dosyası 1'desağlanan kodlar kullanılarak daha kolay ayarlanabilir. Ayrıca, sunulan sürüş simülatörü araştırmacılara sürüşle ilgili çeşitli araştırmaları araştırmak için güvenli, ucuz ve etkili bir yol sağlar. Bu nedenle, bu protokol sınırlı bir bütçeye sahip ve deneysel sürüş ortamlarını özelleştirmek için güçlü bir ihtiyacı olan araştırma laboratuvarları için uygundur.
Protokol
NOT: Burada açıklanan tüm yöntemler Tsinghua Üniversitesi Kurumsal İnceleme Kurulu (IRB) tarafından onaylanmış ve tüm katılımcılardan bilgilendirilmiş onay alınmıştır.
1. Katılımcılar
- İstatistiksel güç elde etmek için deneysel tasarıma göre işe alım için gerekli katılımcı sayısını hesaplamak için bir güç analizi yapın.
- İşe alım sırasında katılımcıların cinsiyetini mümkün olduğunca dengeleyin.
- Katılımcıların geçerli bir ehliyete ve en az bir yıllık sürüş deneyimine sahip olduğundan emin olun.
- Katılımcıların görme grafiğini kullanarak normal veya normal görüşe düzeltilmiş olduğundan emin olun.
- Katılımcıların deneyden önce 24 saat içinde sürüş yeteneklerini etkileyen alkol veya uyuşturucu tüketmemelerini sağlayın33.
2. Simülasyon yazılımı yapılandırmanın yönlendirilimi
- Sürüş simülasyon yazılımının klasörünü ve ardından Çalışma Zamanı klasörünü ve Yapılandırma klasörünü girin. Ardından, "expconfig.txt" dosyasını açın (örneğin, dosya yolu "\torcs-1.3.3-Exp-2018-10-25\torcs-1.3.3\nuntime\config\" olmalıdır).
- Deneysel tasarıma başvurarak herhangi bir yapılandırma uygulayıp uygulamayacağınızla veya varsayılan ayarları kullanarak varsayılan ayarları kullanarak kutudan yeni çıkmış herhangi bir yapılandırma olmadan devam edip etmeyeceğinizle ilgili karar alın. Tablo 1, kullanılabilir tüm seçeneklerin varsayılan yapılandırmalarının ayrıntılı bir açıklamasını gösterir.
- Herhangi bir değişiklik yapılmazsa protokolün Bölüm 3'üne geçin.
| Yapılandırılabilir Seçenekler | Açıklama | Varsayılan Ayarlar |
| endExpByTime | Denemeyi sonlandırmak için saat saatini tetikleyici olarak kullanıp kullanmama. | False |
| endExpAfterMinute | Bu dakikalardan sonra deneyi sonlandırın. | 10 |
| endExpByDist | Sürücü arabasının kullanılıp kullanılmayacağı, deneyi sonlandırmak için bir tetikleyici olarak mesafe kat etti. Hem zaman hem de mesafe tetikleyicileri kullanıldığında, önce biriyle yapılan denemeyi sonlandırın. | False |
| endExpAfterMeter | Bu sayaçlar başlangıç çizgisinden seyahat ettikten sonra deneyi sonlandırın. | 5000 |
| enableRandomFrontalWind | Rastgele aralık ve süre ile ön rüzgarın etkinleştirilip etkinleştirnmeyeceği (yani aracı arka yöne iten bir kuvvet). | True |
| frontalWindIntervalMin | Ön rüzgar aralığının minimum değeri (saniye). | 3 |
| frontalWindIntervalMax | Ön rüzgar aralığının maksimum değeri (saniye). | 13 |
| frontalWindDurationMin | Ön rüzgar süresinin minimum değeri (saniye). | 2 |
| frontalWindDurationMax | Ön rüzgar süresinin maksimum değeri (saniye). | 3 |
| frontalWindForceMin | Ön rüzgar kuvvetinin minimum değeri (newton). | 500 |
| frontalWindForceMax | Ön rüzgar kuvvetinin maksimum değeri (newton). | 1000 |
| enableRandomLateralWind | Yanal rüzgarın (yani aracı sola veya sağa doğru iten bir kuvvet) rastgele aralık ve süre ile etkinleştirilip etkinleştirnmeyeceği. | True |
| lateralWindIntervalMin | Yanal rüzgar aralığının minimum değeri (saniye). | 3 |
| lateralWindIntervalMax | Yanal rüzgar aralığının maksimum değeri (saniye). | 8 |
| lateralWindDurationMin | Yanal rüzgar süresinin minimum değeri (saniye). | 2 |
| lateralWindDurationMax | Yanal rüzgar süresinin maksimum değeri (saniye). | 3 |
| lateralWindForceMin | Yanal rüzgar kuvvetinin minimum değeri (newton). | 1000 |
| lateralWindForceMax | Yanal rüzgar kuvvetinin maksimum değeri (newton). | 2000 |
| leadCarConstantSpeedMPH | Lider aracın sabit hızı (mph). | 40 |
| leadDistToStartWaiting | Lider aracın kuyruğu ile sürücünün kafası arasındaki mesafe (metre) belirtilen sayıdan büyük olduğunda lider araç sürücünün aracını beklemeye başlayacaktır. | 100 |
| leadDistToStopWaiting | Lider araba, sürücünün arabasının önündeki mesafe (metre) bu sayıdan daha küçük olana kadar bekleyecektir. | 80 |
| leadCarBrakeIntervalTimeMin | Lider aracın fren yapması için minimum rastgele zaman aralığı (saniye). | 30 |
| leadCarBrakeIntervalTimeMax | Lider aracın fren yapması için maksimum rastgele zaman aralığı (saniye). | 60 |
| leadCarBrakeEventDuration | Lider araç fren olay süresi (saniye). | 5 |
| enableRandomSMSSound | Rasgele aralıklarla çalınan kısa ileti sunucusu bildirim sesinin etkinleştirilip etkinleştirilip etkinleştirnmeyeceği. | False |
| randSMSIntervalMin | İlk SMS bildiriminin başlangıcından ikinci SMS bildiriminin başlangıcına kadar en az rastgele zaman aralığı (saniye). | 2 |
| randSMSIntervalMax | İlk SMS bildiriminin başlangıcından ikinci SMS bildiriminin başlangıcına kadar maksimum rastgele zaman aralığı (saniye). | 2 |
| enableRandomNbackSound | Rastgele aralıklarla çalınan N-back sayı sesinin etkinleştirilip etkinleştirilip etkinleştirnmeyeceği. | False |
| randNbackIntervalMin | İlk sesin başlangıcından ikinci sesin başlangıcına kadar en az rastgele zaman aralığı (saniye). | 2.33 |
| randNbackIntervalMax | İlk sesin başlangıcından ikinci sesin başlangıcına kadar en fazla rastgele zaman aralığı (saniye). | 2.33 |
| enableUDPSendData | Belirli bir yerel ağ IP'sine zaman damgası veri eşitlemesi etkinleştirilip etkinleştirilip etkinleştirnmeyeceği. | False |
| enableUDPSendDataAdStudy | Reklam çalışması için aşağıdaki IP'ye gönderilecek verilerin etkinleştirilip etkinleştirilmeyeceği. Not: enableUDPSendData ile çakışıyor. | False |
| UDPTargetIPa1 | UDP aktarımı için IP adresi | / |
| UDPTargetIPa2 | ||
| UDPTargetIPa3 | ||
| UDPTargetIPa4 | ||
| UDPTargetPort | Hedef UDP bağlantı noktası. | 1234 |
| UDPcycleNumber | Zaman damgasının ne sıklıknda gönderileceğini denetleyin. Veriler, her döngüde torcs döngülerinin her UDPcycleNumber genellikle 20 ms olduktan sonra gönderilir. | 1 |
| enableUDPQNConnection | QN-Java model sürücüsü benzetimini UDP sunucusu ve istemcisiyle etkinleştirip etkinleştirmemek aynı bilgisayardır. | False |
| UDPQNtoTORCSPort | Simülasyon bağlantı noktası numarasına UDP QN bağlantı noktası. | 5678 |
| UDPTORCStoQNPort | UDP QN bağlantı noktası numarasına benzetim bağlantı noktası. | 8765 |
| leadCarBrakingByWebCommand | Lider aracın fren sinyali için bir web sitesine bağlanıp bağlanmayacağınız. | False |
| Far_Point_Time_Ahead | Araç kontrol modelinde kullanılan parametre. | 2 |
| enableCarFollowingTraining | Simüle edilmiş araç takip görevinin eğitim modunda etkinleştirilip etkinleştirilmeyeceği. | / |
| carFollowingTrainingWarningInterval | Son uyarı sesi başlangıcından eğitim modunun bir sonraki uyarı sesi başlangıcına kadar geçen zaman aralığı. | 2 |
Tablo 1: Sürüş simülasyon yazılımı için varsayılan ayarların listesi. Sürüş simülasyon yazılımının ilişkili yapılandırılabilir tüm seçeneklerinin varsayılan değerlerinin ve her seçeneğin ayrıntılı bir açıklamasının listesi.
- Deneysel tasarımın kararlı kontrol değişkenine göre denemenin nasıl sonlandırılacağına ilişkin ayarları yapılandırın.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "endExpByTime =" seçeneğiyle denemeyi sonlandırmak için saat saatinin tetikleyici olarak kullanılıp kullanılmayacağına karar verin. Örnek çalışmayı çoğaltmak için bu seçeneği False olarak ayarlayın.
- Biçimdeki dakika sayısını bir ondalık basamakla girerek denemenin tetikleyici olarak "endExpAfterMinute =" seçeneğiyle sonlanıp sonlandırılmayacağını seçin. Kat edilen zamana tamamen araştırmacılar karar verebilir. Örnek çalışmayı çoğaltmak için giriş 12.
- Seçeneklerin seçimi olarak True veya False kullanarak "endExpByDist =" seçeneğiyle tetikleyici olarak kat edilen mesafeyle denemenin sonlandırılıp sonlandırılamayacağını ayarlayın. Hem "endExpByTime =" hem de "endExpByDist =" seçenekleri True olarak ayarlandığında, denemenin ilk karşılanan koşulla sona ereceğini unutmayın. Örnek çalışmayı çoğaltmak için bu seçeneği Doğru olarak ayarlayın.
- Başlangıç satırından kat edilen mesafeyi bir ondalık basamakla biçimde metre olarak ayarlamak için "endExpAfterMeter =" seçeneğini kullanın. Kat edilen mesafeye tamamen araştırmacılar karar verebilir. Örnek çalışmayı çoğaltmak için 10000.0 girin.
- Sanal ortam için tasarlanmış rüzgar hızı34 , 35ve deneye başlatılacak bilişsel yük36'ya göre simüle edilmiş sürüş ortamı için rüzgar ayarlarını yapılandırın.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "enableRandomFrontalWind =" seçeneğiyle ön rüzgarın rastgele aralık ve süreyle etkinleştirilip etkinleştirilip etkinleştirmeyeceğini ayarlayın. Örnek çalışmayı çoğaltmak için bu seçeneği Doğru olarak ayarlayın.
- "frontalWindIntervalMin =" ve "frontalWindIntervalMax =" seçenekleriyle, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla girerek minimum ve maksimum ön rüzgar aralığını tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (sırasıyla 3.0 ve 13.0) kullanın.
- "frontalWindDurationMin =" ve "frontalWindDurationMax =" seçenekleriyle en az ve maksimum ön rüzgar süresini, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla girerek tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (sırasıyla 2.0 ve 3.0) kullanın.
- Newton'daki kuvvet miktarını belirterek minimum ve maksimum ön rüzgar kuvvetini "frontalWindForceMin =" ve "frontalWindForceMax =" seçenekleriyle tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (örneğin, sırasıyla 500.0 ve 1.000.0) kullanın.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "enableRandomLateralWind =" seçeneğiyle yanal rüzgarın rastgele aralık ve süreyle etkinleştirilip etkinleştirmeyeceğini seçin. Örnek çalışmayı çoğaltmak için True olarak ayarlayın.
- "lateralWindIntervalMin =" ve "lateralWindIntervalMax =" seçenekleriyle en az ve maksimum yanal rüzgar kuvveti aralığını, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla girerek tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (sırasıyla 3.0 ve 8.0) kullanın.
- "lateralWindDurationMin =" ve "lateralWindDurationMax =" seçenekleriyle, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla girerek minimum ve maksimum yanal rüzgar süresini tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (sırasıyla 2.0 ve 3.0) kullanın.
- Newton'daki kuvvet miktarını belirterek minimum ve maksimum yanal rüzgar kuvvetini "lateralWindForceMin =" ve "lateralWindForceMax =" seçenekleriyle tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (örneğin, sırasıyla 1.000.0 ve 2.000.0) kullanın.
- Simüle edilmiş araba takip görevi için ayarları deneysel tasarıma göre yapılandırın ve35.
- "leadCarConstantSpeedMPH =" seçeneğini kullanarak lider aracın sabit hızını bir ondalık basamakla saatte mil olarak ayarlayın. Örnek çalışmayı çoğaltmak için 40 girin.
- "leadDistToStartWaiting =" ve " leadDistToStopWaiting =" seçenekleriyle, lider aracın sürücünün aracını yakalamasını beklemeye başlamasını veya sürüşe devam etmesini tetiklemek için lider araç ile sürücünün aracı arasındaki ondalık basamaktaki mesafeyi tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (örneğin, sırasıyla 100.0 ve 80.0) kullanın.
- "leadCarBrakeIntervalTimeMin =" ve "leadCarBrakeIntervalTimeMax =" seçenekleriyle lider araç fren olaylarının maksimum ve minimum rastgele zaman aralığını, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla (örneğin, 30.0 ve 60.0) girerek ayarlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (örneğin, sırasıyla 30.0 ve 60.0) kullanın.
- Bir ondalık basamaklı biçimde saniye sayısını girerek fren olay süresini "leadCarBrakeEventDuration =" seçeneğiyle tanımlayın. Örnek çalışmayı çoğaltmak için varsayılan ayarı (örneğin, 5.0) kullanın.
- Rastgele kısa mesaj bildirim sesi ayarlarını deneysel tasarıma ve ihtiyaçlara göre yapılandırın.
- "enableRandomSMSSound =" seçeneği için seçeneklerin seçimi olarak kısa mesaj hizmeti (SMS) bildirim seslerinin True veya False ile rastgele aralıklarla oynatılıp oynatılmayacağına karar verin. Örnek çalışmayı çoğaltmak için seçeneği False olarak ayarlayın.
- İlk SMS bildiriminin başlangıcından ikinci SMS bildiriminin başlangıcına kadar olan minimum ve maksimum zaman aralığını, sırasıyla bir ondalık basamaklı (örneğin, 5.0 ve 10.0) biçimdeki saniye sayısını belirterek "randSMSIntervalMin =" ve "randSMSIntervalMax =" seçeneklerini kullanarak tanımlayın.
- Benzetimli N-back görev37 ayarlarını deneysel tasarıma ve ihtiyaçlara göre yapılandırın.
- "enableRandomNbackSound =" seçeneği için seçeneklerin seçimi olarak N-back sayı seslerini True veya False ile rastgele aralıklarla çalacak şekilde ayarlayın. Örnek çalışmayı çoğaltmak için seçeneği False olarak ayarlayın.
- "randNbackIntervalMin =" ve "randNbackIntervalMax =" seçeneklerini kullanarak ilk sesin uzaklığından ikinci sesin başlangıcına kadar olan minimum ve maksimum zaman aralığını tanımlayarak, biçimdeki saniye sayısını sırasıyla bir ondalık basamakla (örneğin, 5.0 ve 10.0) belirtin.
- Deneme için UDP veri aktarımı gerekiyorsa, Kullanıcı Datagram Protokolü (UDP) ayarlarını yapılandırın.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "enableUDPSendData =" seçeneği aracılığıyla belirli bir yerel ağ IP adresine zaman damgası veri eşitlemesine izin vererek veri aktarımı için UDP'nin etkinleştirilip etkinleştirİlmeyeceğine karar verin. Örnek çalışmayı çoğaltmak için bu seçeneği etkinleştirin.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "enableUDPSendDataAdStudy =" seçeneği aracılığıyla bir reklam çalışması için belirli bir IP adresine veri aktarımı için UDP'nin etkinleştirilip etkinleştirilip etkinleştirİlmeyeceğini seçin. Ayrıca, bu seçeneğin "enableUDPSendData =" ile çakıştığı ve her iki seçeneğin de aynı anda True olarak ayarlanamayacağı hatırlatılabilir. Örnek çalışmayı çoğaltmak için seçeneği False olarak ayarlayın.
- "UDPTargetIPa1 =", "UDPTargetIPa2 =", "UDPTargetIPa3 =" ve "UDPTargetIPa4 =" kullanarak IP adresinin her bölümünü belirterek UDP aktarımının IP adresini tanımlayın.
- "UDPTargetPort =" altındaki hedef bağlantı noktası numarasını belirtin.
- "UDPcycleNumber =" altında gönderilecek verilerin sıklığını, her döngünün 20 ms olduğu "1" döngüsünden büyük veya buna eşit herhangi bir tamsayı ile ayarlayın.
- UDP queuing ağ (QN) model38 bağlantısını deneysel tasarım ve gereksinimlere başvurularak yapılandırın.
- UDP sunucusu ve istemcisinin aynı bilgisayarı paylaştığı QN-Java model sürücüsü benzetimini etkinleştirip etkinleştirmeyeceğini, seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "enableUDPQNConnection =" seçeneğiyle ayarlayın. Örnek çalışmayı çoğaltmak için bu seçeneği devre dışı bırakın.
- "UDPQNtoTORCSPort =" seçeneği altında UDP QN bağlantı noktasından simülasyon bağlantı noktasına kadar olan sayıyı belirtin.
- "UDPTORCStoQNPort =" seçeneği altında simülasyon bağlantı noktasından UDP QN bağlantı noktasına kadar olan sayıyı belirtin.
- Seçeneklerin seçimi olarak Doğru veya Yanlış'ı kullanarak "leadCarBrakingByWebCommand =" seçeneği altındaki deneysel tasarıma göre frenleme sinyalleri için bir web sitesine bağlanıp bağlanmayacağınızı yapılandırın. Bu seçenek True olarak ayarlandığında, "endExpByTime =" ve "endExpAfterMinute =" seçeneğinin çalışmayı durduracağını lütfen unutmayın. Örnek çalışmayı çoğaltmak için seçeneği False olarak ayarlayın.
- Seçenek seçimi olarak True veya False kullanarak "enableCarFollowingTraining =" ile eğitim modunda benzetimli araç takip görevinin etkinleştirilip etkinleştirilmeyeceğini ayarlayın.
- Bir ondalık basamakla saniye sayısını belirterek "carFollowingTrainingWarningInterval =" seçeneğiyle son uyarı sesi başlangıcından eğitimin bir sonraki uyarı sesi başlangıcına kadar olan aralığı tanımlayın (örneğin, 2.0).
- Yapılandırmayı tamamladıktan sonra dosyayı kaydedin.
3. Sürüş simülatörü hazırlığı
- Direksiyon simidini ve merkezi projektörün (en boy oranı 16:10, 192 – 240 Hz yenileme frekansı ve 8 bit renk işleme olan monte edilmiş bir projektör) bilgisayara bağlayın. Yerden 60 cm yukarıda ve aletli aracın önünden 22 cm uzağa 223 x 126 cm boyuta sahip bir projektör ekranı yerleştirildi.
- Seçenekler | altında ekran çözünürlüğünü ayarlama Görüntü, sürüş simülasyon yazılımını başlattıktan sonra ekran boyutunu eşleştirmek için.
- Bir oynatıcı seçmek için Yapılandır sayfasına girin ve direksiyon simidini, hızlandırıcıyı ve fren pedalını kalibre etmek için yazılım tarafından sağlanan yönergeleri izleyin. Bunlar arasında direksiyon simidini çevirmek ve söylendiği gibi gaz pedalına ve fren pedalına basmak yer alıyor.
4. Titreşimli takım seti konfigürasyonu ve hazırlanması
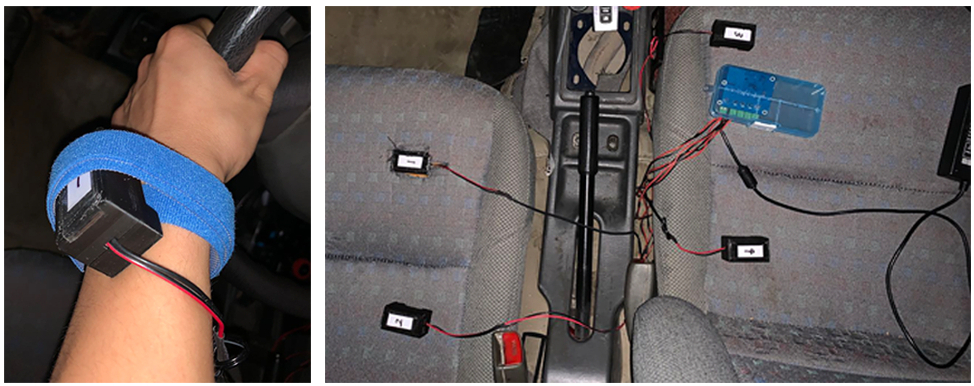
- Titreşimli takım setini güç kaynağına bağlayın. Dört modülün her biri 67 x 57 x 29 mm boyuta sahiptir.

Şekil 2: Titreşimli araç setinin görüntüleri. Titreşimli araç seti, ayrı ayrı etkinleştirilebilen dört ayrı modülden oluşuyordu. Her modülün boyutu 67 x 57 x 29 mm'dir. Bu rakamın daha büyük bir versiyonunu görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Titreşimli araç setini aç ve araç setini Bluetooth üzerinden bilgisayara bağlayın.
- Bir pilot cilt hassasiyeti testini tamamladıktan sonra veya deneysel ihtiyaçlara göre deney için kullanılacak titreşim frekansını tanımlayın.
- Ek Kodlama Dosyası 1 olarak sağlanan kodları kullanarak titreşim frekansını70Hz39,40,41 olarak ayarlayın. Varsayılan olarak 0,5 sn süren her titreşim stimülasyonunda toplam beş frekans seviyesi (örneğin, 14Hz, 28Hz, 42Hz, 56Hz ve 70Hz) mevcuttur.
- Sürüş simülasyon yazılımından ve titreşimli araç setinden fren olaylarını senkronize etmek için Ek Kodlama Dosyası 1 olarak sağlanan kodları kullanın. Şekil 3'te referans olarak revize edilecek kodların etiketli ekran görüntüsü gösterilmiş.

Şekil 3: Ek Kodlama Dosyası 1'deki kodların etiketli ekran görüntüsü. Kodların etiketli ekran görüntüsü, titreşimli araç seti yapılandırması ve hazırlanması için daha kolay bir referans olarak kullanılabilir. Bu kodlar, araç setinin titreşim frekansını ayarlamak ve titreşimli uyarılar oluşturmak için sürüş simülasyon yazılımındaki ve titreşimli araç setlerindeki fren olaylarını senkronize etmek için kullanılır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
5. Deneyin yürütülmesi
- Katılımcılara deneysel süreci tanıtan bilgilendirilmiş onam formunu okumaları ve imzalamaları talimatını vermek ve çalışmanın laboratuvara varışta sürüş performansını değerlendirmek olduğunu beyan etmektir.
- Katılımcılara koltuk mesafesini pedala ayarlamaları ve arkalığı manuel olarak rahat bir konuma ayarlamaları için yardımcı olmak.
- Katılımcılara direksiyon simülatörü, fren pedalı ve gaz pedalı da dahil olmak üzere simülatörü nasıl çalıştıracaklarını öğretin.
- Katılımcılara, önlerindeki arabayı takip ederek ve arkasında iki saniyelik bir ilerleme tutarak gerçek dünyada olduğu gibi sürmelerini söyleyin. Şekil 4 sürüş simülasyonunda kullanılan yol haritasını göstermektedir.

Şekil 4: Sürüş simülasyonunda kullanılan yol haritası. Kullanılan yol, dört kavisli (maksimum uzunluk 15.000 metre), üç şeritli ve trafik ışığı olmayan tek yönlü bir yoldur. Sürüş simülatörü yazılımı, yol işaretlerini veya reklam panolarını içerme seçenekleri gibi diğer yol tasarım seçeneklerini sunar. EEG uyumlu bir sürüm de mevcuttur. Gerekirse tüm bu parametreler ayarlanabilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
- Senaryo fren tepkisi gerektirmse bile, ön araç fren olduğunda katılımcıları mümkün olan en kısa sürede frene basmaları konusunda bilgilendirin. Ön aracın stop lambaları, bir fren olayını belirtmek için gerçek dünya sürüşüne göre yanacak.
- Katılımcılara, ön aracın arkasında iki saniyelik bir ilerleme mesafesini korumayı öğrenmeleri için 5 dakikalık bir deneme denemesi sağlayın. Deneme, 5 rastgele fren seti içerir.
- Uygulama denemesi sırasında, katılımcılar ön aracın 1,5 sn'den daha az gerisindeyse, sürüş simülasyon yazılımı "çok yakın, lütfen yavaşlayın" kadın sesiyle bir istem oynayacaktır.
- Katılımcılar ön aracın 2,25 ila 2,5 s gerisindeyse, sürüş simülasyon yazılımı "çok uzak, lütfen hızlan" kadın sesiyle bir istem oynayacaktır.
- Analiz için alıştırma denemesinden veri eklemeyin.
- Gerekirse deneycileri herhangi bir zamanda bilgilendirerek çalışmanın herhangi bir ceza olmadan durdurulabileceğini katılımcılara bildirin.
- Katılımcılar alıştırma oturumunu tamamladıktan sonra resmi deneye başlayın ve sabit bir takip mesafesi koruyabilir.
- Her blokta 13 rastgele frenleme olayı ile toplam dört bloktan (yani parmak, bilek, tapınak ve yalnızca sürüş) oluşan resmi deneysel oturuma başlayın ve toplam 52 deneysel deneme ile sonuçlanır. Koşulların sırası Latin kare tasarımı ile dengelenmiştir. Resmi denemelerde sesli istem sağlanmıştır.
- Katılımcıların, atanan koşullara göre her deneme bloğundan önce tıbbi bant kullanarak titreşimli araç setini takmalarına yardımcı olmak. Titreşimli alet seti (giyilirse), ön araç fren yaparken katılımcıları frene basmaları konusunda uyarır. Ön aracın stop lambaları ön araç her fren yaptığında yanar.
- Taşıma etkilerini azaltmak için her bloğun tamamlanmasından sonra katılımcılara 2 dakika dinlenme verildiğinden emin olun.
- Tüm denemelerin tamamlanmasından sonra katılımcılardan titreşimli takım seti ve algılanan titreşim yoğunluğu için tercih ettikleri yeri 7 noktalı Likert ölçeğinde isteyin. Her günlük giyilebilir aksesuarın (örneğin, saat, gözlük, kulaklık ve yüzük) kullanım oranı da kaydedilir. Titreşimli araç setinin konumu için tercih ölçeğinde, "1" "en az favoriyi" ve "7" "en favoriyi" temsil ederken, titreşim yoğunluğu ölçeğinde "1" "zayıf hissi" ve "7" "güçlü hissi" temsil eder.
6. Veri analizi
- Fren tepki süresi, araç hızı, direksiyon ters dönüş hızı, şerit konumu (SDLP) ve ilerleme mesafesi vb.
- Sürücülerin performansının veri analizini gerçekleştirin.
- Daha fazla analiz için hangi verilerin dahil edileceğini belirlemek için ortalamadan üç standart sapma olarak kesilmiş normal dağılımı kullanarak aykırı bir analiz yapın.
- Katılımcı aracın fren yaptığı süreyi (yani fren pedalının minimum %1'inin36,42)ön aracın fren yapmaya başladığı andan itibaren çıkararak fren tepki süresini hesaplayın.
- Fren tepki süresi 5 s'den büyük veya buna eşitse (yani, ön araç frenlerinden sonra 5 s içinde fren yapmama) verileri "fren tepkisi yok" olarak etiketleyin.
- Fren tepki hızını hesaplamak için başarılı fren sayısını ön araç tarafından gerçekleştirilen toplam fren sayısına bölün.
- Her koşulun ortalama fren tepki hızını ve fren tepki süresini elde etmek ve daha fazla analiz için bu değerler üzerindeki standart sapmayı hesaplamak için her katılımcının tüm değerlerini ortalama.
Sonuçlar
Bu makalede bildirilen örnek çalışma, daha önce akademik bir dergide de yayınlanan sürüş simülatörü ve titreşimli araç seti kullanarak araba takip görevini yürüttü22. Titreşimli araç setinin eski versiyonunun örnek çalışma yapılırken kullanılması dikkat çekicidir, yukarıdaki protokolde titreşimli araç setinin yeni bir sürümü tanıtılmıştır. Çalışma, tek faktör olarak titreşimli uyarı konumuna sahip bir konu tasarım deneyiydi: parmak, bilek, şakak uyar...
Tartışmalar
Sürüş simülasyon platformu ve titreşimli araç seti, potansiyel giyilebilir vibrotactile cihazlarının gerçek hayatta uygulanmasını makul bir şekilde taklit ederek sürüşle ilgili araştırmaların araştırılmasında etkili bir teknik sağladı. Bu teknolojinin kullanımıyla, gerçek dünyadaki sürüşle karşılaştırılabilir araştırmalar yapmak için yüksek yapılandırılabilirliğe ve uygun fiyatlı güvenli bir deneysel ortam kullanıma sunuldu.
Daha fazla dikkat gere...
Açıklamalar
Yazarlar herhangi bir finansal açıklama veya çıkar çatışması olmadığını beyan ettiler.
Teşekkürler
Bu proje Pekin Yetenekler Vakfı tarafından desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Referanslar
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır