需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
保留 retzius 机器人辅助根治性前列腺切除术
摘要
机器人辅助的Retzius保留根治性前列腺切除术是一种能够保持尿失禁或促进大多数患者尿失禁恢复的技术。必须告知患者手术切缘阳性的风险。
摘要
提供了保留Retzius的机器人辅助根治性前列腺切除术(RS-RARP)的技术以及在单个中心的初步经验。该技术将逐步描述,并通过视频进一步说明以增强可重复性。评估早期肿瘤学和功能结果。总共纳入77名患者,中位随访时间为11个月(范围:3-21个月)。51%的患者患有局部高风险或局部晚期前列腺癌。没有术中并发症,所有高级别并发症(2.6%)与RS-RRP同时进行的盆腔淋巴结清扫术有关。中位手术时间为160分钟(范围:122-265分钟),中位住院时间为3天(范围:3-8)。据报道,42.9% 的患者手术切缘阳性。一年生化无复发生存率为90.1%。6个月后,所有患者均处于社交状态,1年后,94.3%的患者完全进入社交状态。在至少接受单侧神经保留的性活跃患者中,43.3%能够进行。该系列强调了通过标准化技术进行RS-RRP的手术安全性,并证实了对尿失禁早期恢复的有益作用。需要告知患者手术切缘阳性的风险。
引言
为了治愈局部和选定的局部晚期前列腺癌病例,根治性前列腺切除术是推荐的治疗方案之一1。与开放性根治性前列腺切除术2,3 相比,微创技术(常规腹腔镜检查和机器人辅助腹腔镜检查)具有降低失血、术后疼痛和住院时间的优势。在微创技术中,机器人辅助手术结合了微创手术的优点,增加了手术器械的灵活性和移动自由度,并具有三维围手术期视觉。在资源丰富的国家,机器人辅助根治性前列腺切除术(RARP)已成为进行根治性前列腺切除术的主要模式4。
暂时性或确定性尿失禁是根治性前列腺切除术的常见副作用,无论其实施方式如何5.对于开放性(腹部)、腹腔镜和"标准"前 RARP (SA-RARP),根治性前列腺切除术采用前路入路进行,其中耻骨后 (Retzius) 空间被打开6.由于与 RARP 相关的灵活性增加,另一种解剖学方法是可能的,其中前列腺通过直肠袋或道格拉斯袋切除,如 Galfano 等人首次描述的那样7。这种后方方法使雷齐乌斯的空间完好无损("雷齐乌斯保留的RARP";RS-RARP)。RS-RARP 的主要优点似乎是尿失禁恢复更快、更快8.本研究旨在详细描述(如帕萨迪纳共识小组9所建议的那样)由视听材料支持的RS-RRP步骤,并报告单个中心中第一批病例的早期功能和肿瘤学结果。
研究方案
这项研究已提交给根特大学医院的地方伦理委员会,并已获得机构批准(EC UZG 2019/1506)。该研究已在比利时研究注册处注册,参考号为B670201941650。所有患者均提供了书面知情同意书。
1. 患者准备和定位
- 制备
- 遵循当代国际公认的指南来诊断前列腺癌,并为根治性前列腺切除术1 设定适应症。使用多参数 MRI 进行局部分期,因为这提供了有关前列腺体积、伴随前列腺增大和正中叶以及肿瘤位置和扩展的重要信息。这将有助于决定是否进行神经保留和/或膀胱颈保留10。请确保此映像在操作时可用。
- 为预期寿命>10 年的局部或局部晚期前列腺癌患者提供 RS-RARP。讨论替代治疗方案,如主动监测、其他根治性前列腺切除术和放疗(如适用)。不要向转移性前列腺癌患者提供RS-RARP。
- 通过术前麻醉学检查排除特伦德伦堡陡峭体位机器人手术禁忌证的疾病。如果存在这些疾病,请先治疗(如果可能)或与患者讨论替代治疗。在极少数情况下,在术前评估中包括患者血液的类型和筛查,需要输血。
- 在手术前4-8小时给予钠月桂基磺基乙酸 - 山梨醇 - 柠檬酸钠二水合物以清洁直肠。允许食物摄入和透明液体的摄入,分别直到诱导前6小时和4小时。
- 通过气管插管进行全身麻醉。诱导时给予头孢唑啉 2g 的单次预防性注射。
- 插入一根大口径外周静脉输液管和一条动脉管,以确保进入和监测循环系统。在整个手术过程中使用脉氧测定法和 4 导联心脏监测。
- 定位
- 将患者置于仰卧位。沿着患者的身体放置并固定手臂,并通过膝盖水平的带子固定腿部。用凝胶垫固定任何压缩点。
注意:患者穿着血栓栓塞威慑性长袜。 - 应用肩部支撑,以避免由于特伦德伦堡陡峭的位置而移位。用胶带(7.5 cm 宽)将患者的胸部固定在手术台上,以防止进一步移位。用胸部保暖毯装置覆盖患者。
- 使用聚维酮碘醇溶液对手术区域进行消毒,或者在碘过敏的情况下使用洗必泰消毒。将前腹部、腹股沟和生殖器纳入手术区域。消毒后,在田地边界贴上无菌窗帘。
- 放置 16 F 水凝胶包被的乳胶经尿道导管,以确保插入穿刺器时进行尿引流和膀胱排空。确保易于接触经尿道导管,因为它将有助于在手术后期识别尿道。
- 将患者置于仰卧位。沿着患者的身体放置并固定手臂,并通过膝盖水平的带子固定腿部。用凝胶垫固定任何压缩点。
2. 对接机器人系统
- 用无菌窗帘覆盖患者推车的机械臂,因为它们稍后会与手术区域接触。使用 30° 摄像头。
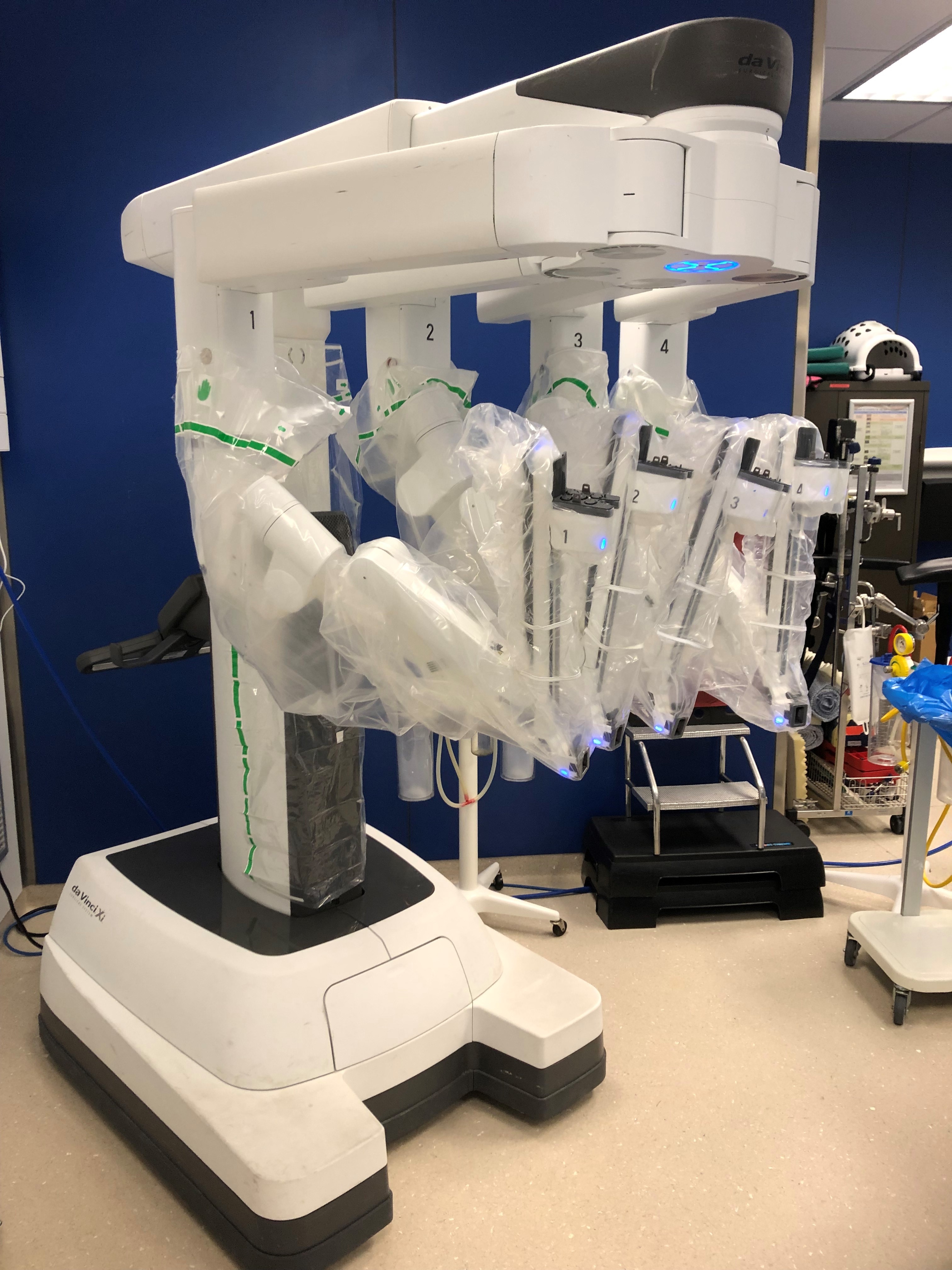
注:达芬奇Xi系统用于此操作(图1)。该系统由三个基本部分组成:放置在手术台一定距离处的外科医生控制台;一个带有四个机械臂的患者推车,将停靠在穿刺器上,一个视觉推车,带有用于擦洗护士和助手的监视器,电烙系统和CO2-吹药器放置在患者旁边。 - 穿刺器插入
- 插入相机穿刺器
- 在脐上方约1厘米处纵向切开2-2.5厘米的皮肤切口。钝切地解剖皮下脂肪组织,直到发现直肌筋膜。
- 纵向切开直肌筋膜,并在两侧的筋膜上放置可吸收的聚乳糖 1 停留缝合线。
- 用剪刀打开腹膜。通过食指的数字触诊确保肠道没有接触这个开口。
- 在腹膜腔中插入带有哈森锥体的 8 毫米机器人相机穿刺器。将锥体的夹子连接到筋膜处的保持缝合线上。
- 将相机穿刺器连接到 CO2 吹药器并充气至 12-15 mmHg 压力。将患者置于 30-35° 特伦德伦堡位置,将小骨盆从小肠中解放出来。确保在陡峭的特伦德伦堡定位过程中车身没有移动。
- 放置在相机穿刺器的水平水平,两个和一个用于机器人仪器的8毫米穿刺器分别位于相机穿刺器的左侧和右侧,任何机器人穿刺器之间的距离为6-8厘米。将所有穿刺器放在相机的直视下。使用钝尖闭孔器放置穿刺器。
- 将 5 毫米辅助穿刺器放在相机穿刺器和右侧机器人穿刺器之间的中线 5 厘米处。将 12 mm 辅助穿刺器放在右髂骨上部上方 3 cm 处。
注意:助手在患者的右侧,而擦洗护士在患者的左侧。 - 断开相机穿刺器处的吹气电缆,然后连接到 12 毫米辅助穿刺器。
- 插入相机穿刺器
- 患者推车的对接和机器人器械的插入
- 将患者推车移到患者的右侧,直到第三个臂可以连接到相机穿刺器。使用系统的自动应用进一步优化患者推车的定位。连接其他三个 8 毫米穿刺器,手臂之间至少保持 10 厘米的距离,以避免在操作过程中发生碰撞。
- 用作机器人仪器,单极弯曲剪刀,开窗双极钳,Cadiere镊子和大型针刀。手术开始时,将单极剪刀放在右侧机器人穿刺器中,将双极开窗镊子放在左侧内侧机器人穿刺器中,将Cadiere镊子放在左侧横向机器人穿刺器中。
- 通过直接视觉控制机器人仪器的插入,以避免内脏穿孔、网膜粘连或血管结构。
- 作为辅助器械,使用放置在 5 毫米辅助穿刺器中的腹腔镜吸灌装置和放置在 12 毫米辅助穿刺器中的腹腔镜抓握器。在外科医生控制台上进行,以开始手术的机器人辅助部分。
注意:这些腹腔镜器械由助手操作,未连接到机械臂。

图 1:带有 4 个机械臂的患者推车。 请点击此处查看此图的大图。
{kind=link}
3.精囊解剖
- 进入小骨盆
- 通过释放任何阻碍轻松进入小骨盆和直肠袋的粘连来进行粘连松解。在晶状体向下旋转 30° 的情况下进行这种粘附松解。
- 通过使用Cadiere镊子向上推动膀胱并使用吸灌装置向下推动直肠,从而促进进入直肠袋(或道格拉斯袋)。
- 进入精囊
- 在两侧输精管上切开腹膜,并继续向内侧切开,直到这些切口相互到达。
注意:输精管在穿过髂外血管时最容易识别,尤其是在肥胖男性中。 - 在切口的侧边缘,以圆周方式解剖输精管并横断。内侧解剖输精管,直到到达精囊尖端。
- 在两侧输精管上切开腹膜,并继续向内侧切开,直到这些切口相互到达。
- 精囊解剖
- 从输精管内侧剥离Denonvilliers的筋膜,以防没有精囊侵犯的证据。如果怀疑精囊浸润,在精囊下缘下方 1-2 mm 处切开 Denonvilliers 筋膜,以确保手术边缘安全。
- 通过双相止血或用5毫米金属夹固定血管在精囊尖端和侧表面进入的位置,并横断它们。继续这种解剖,直到到达前列腺的底部。在另一侧执行相同的过程。
注意:勃起神经靠近精囊的尖端和侧表面,如果尝试保留神经,应避免单极凝血。
4.前列腺后外侧夹层
- 前列腺侧向解剖
- 右侧通过Cadiere钳和左侧辅助腹腔镜抓手向内侧缩回精囊泡。这允许在精囊底部和前列腺底部外侧区域之间的三角形处可视化脂肪组织。
注意:这个三角形就在勃起神经和前列腺蒂的上方。 - 沿着前列腺的外表面对该脂肪组织进行钝性解剖,直到遇到骨盆内筋膜的反射。通过双极镊子进行止血,因为单极电流可能会损害勃起神经。
- 右侧通过Cadiere钳和左侧辅助腹腔镜抓手向内侧缩回精囊泡。这允许在精囊底部和前列腺底部外侧区域之间的三角形处可视化脂肪组织。
- 腹膜悬浮液
- 通过腹膜切口上部的两条悬浮缝合线,便于进入前列腺和膀胱颈。
- 将大针刀插入右侧机械臂。将一根不可吸收的直针穿过耻骨上方 2-3 cm 的腹壁,就在内侧脐韧带内侧。
- 用直针穿孔腹膜切口的上部和下面的脂肪组织。将针头放回体外,靠近插入道。使用腹部外的蚊子夹保持这种悬挂针脚处于张力下。在对侧做同样的事情。
- 前列腺后部夹层
- 取下针刀,将弯曲的剪刀带回右侧机械臂。用Cadiere镊子和辅助腹腔镜抓手分别在左侧和右侧向上和稍微横向缩回精囊泡,以使Denonvilliers的筋膜处于张力之下。
- 处理勃起神经。
- 双侧保留神经的方法:通过在前列腺筋膜和Denonvillier筋膜之间钝性解剖,直到前列腺顶端和横向直至遇到前列腺血管,形成平面。
- 非保留神经的方法:在前列腺底部下方 1-2 mm 处切开 Denonvilliers 筋膜。解剖直肠前表面,并在直肠周围脂肪组织中更横向解剖。
- 单侧保留神经的方法:在保留神经的部位执行步骤4.3.2.1,在非保留神经的部位执行步骤4.3.2.2。在直肠壁的中线切开Denonvilliers的筋膜。
- 前列腺蒂止血和神经血管束夹层
- 进入右侧:用Cadiere镊子抓住前列腺底部,就在同侧精囊的附着物下方。向内侧和略微向上缩回前列腺基部,使前列腺蒂处于张力状态。
- 用前列腺蒂中的单极剪刀制作一个窗口,并使用通过 12 毫米辅助穿刺器施加的大型聚合物锁定夹固定椎弓根的这一部分。在夹子的前列腺侧横断椎弓根的这一部分。
- 重复4.4.2(通常为2-3次),直到整个前列腺蒂固定。每次椎弓根的一部分被横断后,保持前列腺椎弓根的张力。
- 重复步骤4.4.2,直到达到前列腺的顶点。每次开窗时与前列腺表面保持安全距离。
注意:这将牺牲包含勃起神经的神经血管束。 - 通过钝性解剖从前列腺筋膜上剥离神经血管束,并使用Cadiere镊子进行渐进的内侧和向上回缩使束处于轻微张力下。
- 用5毫米金属夹固定连接到前列腺的小血管,并用剪刀横断它们。继续直到达到前列腺的顶点。确保助手在需要时通过 5 毫米穿刺器进行抽吸和冲洗。
- 进入左侧:将 Cadiere 镊子切换到左侧内侧穿刺器,将开窗双极钳切换到左侧外侧穿刺器。向内侧和向上缩回前列腺底部。使用仪器的内腕向下创建 90° 角,助手可以轻松接触到放置夹子。如上所述在左侧重复该过程(步骤4.4.2至4.4.6)。
5.膀胱颈解剖
- 用Cadiere镊子抓住精囊并向下缩回,以在膀胱颈和前列腺底部之间产生张力。
- 使用单极切口与剪刀和钝性解剖的组合,在膀胱颈和前列腺底部之间展开平面。保留膀胱颈的圆形肌纤维,以防膀胱颈保留。将精囊更横向移动,以促进膀胱颈的侧向解剖。
- 膀胱颈开口
- 切开膀胱颈后侧的粘膜超过 1 cm。可视化尿道导管。
- 将可吸收的聚乳糖 3-0 缝合线放在膀胱颈的后侧。放气导管的球囊并缩回导管。
- 用开窗的双极镊子抓住保持缝合线并向上移动,直到膀胱颈的前部变得可见。进一步切开粘膜,从前列腺底部释放膀胱颈。
- 在膀胱颈完全松开之前,用可吸收的聚乳糖 3-0 缝合线在膀胱颈的前侧放置第二条停留缝合线。
注意:这些保持缝合线将有助于以后识别膀胱颈的膀胱 - 尿道吻合术。
6.前和前列腺尖夹层
- 前部夹层
- 用开窗双极钳在膀胱后侧的保持缝合处继续轻微向上张力。将Cadiere镊子放在前列腺尿道中,向下牵引以在前列腺前表面产生张力。
- 使用钝性夹层和单极切口的组合来追踪前列腺的前表面,保留圣托里尼神经丛、耻骨前列腺韧带和 Retzius 间隙。横向移动Cadiere镊子以促进前外侧夹层。
- 前列腺尖夹层
- 通过用Cadiere镊子抓住尿道导管来识别膜性尿道。
- 将尿道的圆形纤维切开1-2毫米的尾部到前列腺的顶端。将圆形纤维推向前列腺的顶端,以暴露尿道的内纵层(所谓的括约肌)。使该内层尽可能靠近前列腺进行横断面,以最大限度地保留括约肌。
- 切开膜尿道背侧的任何附着物,直到前列腺完全脱离周围组织。通过 12 毫米辅助穿刺器插入内袋以放入前列腺(和精囊)。关闭内袋并将其关闭在右髂窝。
7.膀胱-尿道吻合术
- 将大针刀放在右侧机器人穿刺器中,将 Cadiere 镊子和开窗双极钳分别放在左侧内侧和外侧机器人穿刺器中。使用开窗双极钳将膀胱轻轻推向尿道,以减轻吻合处的张力。
- 膀胱-尿道吻合术的缝合
- 将第一条可吸收带刺铁丝网(3-0,长 23 厘米)的第一条缝合线由外向内放置在膀胱颈上 12 点钟位置右侧。拉动步骤5.3.4中放置的前留缝合线以识别膀胱颈和膀胱粘膜。
- 将缝合线由内而外放在尿道上,也稍微偏向 12 点钟位置右侧。通过将尿道导管的尖端移动到膜性尿道中来识别尿道。
- 将第二条可吸收带刺铁丝网(3-0,长 23 厘米)的第一条缝合线由外向内放置在膀胱颈 12 点钟位置左侧的一侧,由内而外放置在尿道上相同的位置。
- 对于左侧的后缝合,通过对带刺铁丝网两端的渐进牵引,使膀胱黏膜近似于尿道黏膜。用膀胱颈上由外而内的第二根带刺铁丝网和尿道上由内而外重复缝合两次,此时达到 9 点钟位置。每次缝合后,将膀胱黏膜与尿道黏膜近似。
- 对于右侧缝合,用膀胱颈上由外而内的第一根带刺铁丝网进行缝合,在尿道上由内而外缝合,直到达到 6 点钟位置。不要接近最后的缝合线,以便留出空间来完成吻合口的左侧。
- 对于左侧的前缝合,从9点钟位置到6点钟位置继续左侧的吻合。不要接近最后一次缝合,以使导管的尖端在左右带刺铁丝网之间通过。
- 抓住导管的尖端并将其放入膀胱中。给气球充气。
- 收紧左右两侧的最后缝合线,直到膀胱和尿道粘膜近似。通过在膀胱中滴注 120 mL 水来检查吻合口的水密性(泄漏测试)。
- 将第一条可吸收带刺铁丝网(3-0,长 23 厘米)的第一条缝合线由外向内放置在膀胱颈上 12 点钟位置右侧。拉动步骤5.3.4中放置的前留缝合线以识别膀胱颈和膀胱粘膜。
- 移除腹膜切口上部的悬浮缝合线。使用带刺铁丝网的残余物将两侧从内侧到外侧的腹膜切口闭合。如果当代国际公认的指南有指征,则进行双侧盆腔淋巴结清扫术1.
注意:如果未进行盆腔淋巴结清扫,则不会留下手术引流管。
8.提取前列腺和闭合切口
- 在直视下将内袋的提取线从右侧机器人穿刺器转移到相机穿刺器上。
- 放气腹部并在直视下取出穿刺器。将特伦德伦堡体位更改为中性仰卧位。进一步切开脐上皮肤切口和筋膜切口,以便于提取前列腺。
注意:这个切口的大小取决于前列腺的大小。 - 用可吸收的多乳糖1缝合线关闭直肌筋膜。用可吸收的聚乳糖3-0缝合线关闭相机穿刺器和12毫米辅助穿刺器的皮下组织。用皮肤吻合器关闭所有皮肤切口。
9. 术后护理
- 将患者转移到术后护理单元并监测2-3小时。经麻醉师和外科医生批准后,将患者转移到住院病房。
- 让患者恢复摄入透明液体。允许摄入固体食物,并在术后第一天刺激四处走动。术后第三天取出尿道导管,测量排尿量和残余膀胱容积。在大量残余体积的情况下更换导管,并在 1 周后在综合诊所将其移除。
- 术后第三天出院。全科医生在术后第 10天和第 14 天之间取下皮肤吻合器。皮下注射低分子量肝素,直到术后第20天由护士在家中或患者本人给药。
结果
所有预期寿命>10年且无麻醉禁忌症的局部或局部晚期前列腺癌患者均提供RS-RARP作为其疾病的治疗选择之一。在临床试验或挽救性根治性前列腺切除术的背景下,接受转移性前列腺癌减瘤性根治性前列腺切除术的患者未提供RS-RARP,并且优选为前部肿瘤患者提供SA-RARP。随访少于3个月的患者被排除在外。手术前,所有患者均进行了血清前列腺特异性抗原(PSA)的测量并进行了MRI检查。术前通过经直肠...
讨论
在RS-RRP期间,整个过程是通过后端接近膀胱来执行的。因此,与SA-RARP的主要区别在于保留了Retzius的空间。保留Retzius的空间有几个解剖学优势7:首先,膀胱没有与腹壁分离,脐带没有横断。因此,膀胱保持在其解剖位置。其次,逼尿肌前围裙和耻骨前列腺韧带未横断。虽然称为耻骨前列腺韧带,但这些韧带延伸到膀胱前表面,最好称为耻骨韧带13。这些韧带是失...
披露声明
作者没有利益冲突。
致谢
这项研究没有获得任何资金。
材料
| Name | Company | Catalog Number | Comments |
| adhesive tape | BSNmedical | 15200028 | Tensoplast |
| assistant trocar 5mm | Aesculap | EKO17R | reusable trocar |
| assistant trocar 12mm | Conmed | iAS12-120LPi | AirSeal trocar |
| barbed wire | Covidien | VLOCM0024 | for vesico-urethral anastomosis |
| Cadiere forceps | Intuitive | 470049 | robotic instrument, grasper |
| camera 30° | Intuitive | 470027 | endoscope |
| cefazolin | Sandoz | BE217296 | Belgian farmaceutical registration |
| CO2-insufflator | Conmed | AS-iFS2 | AirSeal insufflator |
| Da Vinci Xi system | Intuitive | 600062 | robotic system |
| endobag | Covidien | 173050G | Endo Catch 10mm |
| endoscopic hem-o-lok applier | Teleflex | 544995T | to apply the locking clips |
| fenestrated bipolar forceps | Intuitive | 470205 | robotic instrument, bipolar forceps |
| Hasson cone 8mm trocar | Intuitive | 470398 | only at the camera trocar |
| heparin, low molecular weight (enoxaparin) | Sanofi | BE144347 | Belgian farmaceutical registration |
| hydrogel coated latex transurethral catheter | Bard | D226416 | Biocath |
| insufflation cable | Conmed | ASM-EVAC1 | AirSeal Tri-lumen filtered tube set |
| laparoscopic grasper | Aesculap | PO235R | Atraumatic wave grasper, double action |
| large needle driver | Intuitive | 470006 | roboic instrument, needle driver |
| locking clip | Grena | 5-13mm | Click'aVplus |
| metallic clips 5mm | Aesculap | PL453SU | for vessel ligation |
| monopolar curved scissor | Intuitive | 470179 | robotic instrument, hot shears |
| mosquito clamp | Innovia Medical | MQC2025-D | to secure bladder suspension stitch |
| natriumlaurylsulfoacetate-sorbitol-natriumcitratedihydrate clysma | Johnson & Johnson Consumer BV | RVG 05069 | Belgian farmaceutical registration |
| polyglactin 3.0 suture | Ethicon | V442H | stay suture bladder neck, subcutaneous sutures |
| polyglactin 1 suture | Ethicon | D9708 | stay suture fascia and fascia closurie |
| povidone-iodine alcoholic solution | Mylan | BE230736 | Belgian farmaceutical registration |
| robotic trocar 8mm | Intuitive | 470002 | standard length |
| Skin stapler | Covidien | 8886803712 | skin closure |
| sterile drapes robotic arms | Intuitive | 470015 | draping system robotic arms |
| suction-irrigation device | Geyi | GYSL-5X330 | laparoscopic use by assitant |
| suspension sutures | Ethicon | 628H | Ethilon 2-0 nylon suture |
| thrombo-embolus deterrent stockings | Covidien | 7203 | T.E.D. stockings |
| warming blanket device | 3M | 54200 | Bear Hugger |
参考文献
- Mottet, N., et al. EAU-EANM-ESTRO-ESUR-SIOG Guidelines on Prostate Cancer-2020 Update. Part 1: Screening, Diagnosis, and Local Treatment with Curative Intent. European Urology. 79 (2), 243-262 (2021).
- Ilic, D., et al. Laparoscopic and robotic-assisted versus open radical prostatectomy for the treatment of localised prostate cancer. The Cochrane Database of Systematic Reviews. 9 (9), (2017).
- Ab del Raheem, A., et al. Retzius-sparing robot-assisted radical prostatectomy versus open retropubic radical prostatectomy: a prospective comparative study with 19-month follow-up. Minerva Urologica e Nefrologica: The Italian Journal of Urology and Nephrology. 72 (5), 586-594 (2020).
- Gandaglia, G., et al. Comparative effectiveness of robot-assisted and open radical prostatectomy in the postdissemination era. Journal of Clinical Oncology : Official Journal of the American Society of Clinical Oncology. 32 (14), 1419-1426 (2014).
- Ficarra, V., et al. Systematic review and meta-analysis of studies reporting urinary continence recovery after robot-assisted radical prostatectomy. European Urology. 62 (3), 405-417 (2012).
- Martini, A., et al. Contemporary techniques of prostate dissection for robot-assisted prostatectomy. European Urology. 78 (4), 583-591 (2020).
- Galfano, A., et al. A new anatomic approach for robot-assisted laparoscopic prostatectomy: a feasibility study for completely intrafascial surgery. European Urology. 58 (3), 457-461 (2010).
- Checcucci, E., et al. Retzius-sparing robot-assisted radical prostatectomy vs the standard approach: a systematic review and analysis of comparative outcomes. BJU International. 125 (1), 8-16 (2020).
- Montorsi, F., et al. Best practices in robot-assisted radical prostatectomy: recommendations of the Pasadena Consensus Panel. European Urology. 62 (3), 368-381 (2012).
- Stabile, A., et al. Multiparametric MRI for prostate cancer diagnosis: current status and future directions. Nature Reviews. Urology. 17 (1), 41-61 (2020).
- Dindo, D., Demartines, N., Clavien, P. A. Classification of surgical complications: a new proposal with evaluation in a cohort of 6336 patients and results of a survey. Annals of Surgery. 240 (2), 205-213 (2004).
- Xylinas, E., et al. Evaluation of combined oncological and functional outcomes after radical prostatectomy: trifecta rate of achieving continence, potency and cancer control--a literature review. Urology. 76 (5), 1194-1198 (2010).
- Walz, J., et al. A critical analysis of the current knowledge of surgical anatomy related to optimization of cancer control and preservation of continence and erection in candidates for radical prostatectomy. European Urology. 57 (2), 179-192 (2010).
- Walz, J., et al. A critical analysis of the current knowledge of surgical anatomy of the prostate related to optimisation of cancer control and preservation of continence and erection in candidates for radical prostatectomy: An update. European Urology. 70 (2), 301-311 (2016).
- Albisinni, S., et al. Systematic review comparing Anterior vs Retzius-sparing robotic assisted radical prostatectomy: can the approach really make a difference. Minerva Urology and Nephrology. , (2021).
- Menon, M., et al. Functional recovery, oncologic outcomes and postoperative complications after robot-assisted radical prostatectomy: An evidence-based analysis comparing the Retzius sparing and standard approaches. The Journal of Urology. 199 (5), 1210-1217 (2018).
- Olivero, A., et al. Retzius-sparing robotic radical prostatectomy for surgeons in the learning curve: A propensity score-matching analysis. European Urology Focus. 7 (4), 772-778 (2021).
- Galfano, A., et al. Retzius-sparing robot-assisted radical prostatectomy: early learning curve experience in three continents. BJU International. 127 (4), 412-417 (2021).
- Galfano, A., et al. Beyond the learning curve of the Retzius-sparing approach for robot-assisted laparoscopic radical prostatectomy: oncologic and functional results of the first 200 patients with >/= 1 year of follow-up. European Urology. 64 (6), 974-980 (2013).
- Hoffman, K. E., et al. Patient-reported outcomes through 5 years for active surveillance, surgery, brachytherapy, or external beam radiation with or without androgen deprivation therapy for localized prostate cancer. JAMA. 323 (2), 149-163 (2020).
- Dalela, D., et al. A pragmatic randomized controlled trial examining the impact of the Retzius-sparing approach on early urinary continence recovery after robot-assisted radical prostatectomy. European Urology. 72 (5), 677-685 (2017).
- Yossepowitch, O., et al. Positive surgical margins after radical prostatectomy: a systematic review and contemporary update. European Urology. 65 (2), 303-313 (2014).
- Vale, C. L., et al. Adjuvant or early salvage radiotherapy for the treatment of localised and locally advanced prostate cancer: a prospectively planned systematic review and meta-analysis of aggregate data. Lancet. 396 (10260), 1422-1431 (2020).
- Lumen, N., et al. Safe introduction of robot-assisted radical prostatectomy after a training program in a high-volume robotic centre. Urologia Internationalis. 91 (2), 145-152 (2013).
- Galfano, A., Secco, S., Bocciardi, A. M. Mottrie A. Retzius-sparing robot-assisted laparoscopic radical prostatectomy: An international survey on surgical details and worldwide diffusion. European Urology Focus. 6 (5), 1021-1023 (2020).
- Checcucci, E., et al. Precision prostate cancer surgery: an overview of new technologies and techniques. Minerva Urologica e Nefrologica: The Italian Journal of Urology and Nephrology. 71 (5), 487-501 (2019).
- Grasso, A. A., et al. Posterior musculofascial reconstruction after radical prostatectomy: an updated systematic review and a meta-analysis. BJU International. 118 (1), 20-34 (2016).
- Manfredi, M., et al. Total anatomical reconstruction during robot-assisted radical prostatectomy: focus on urinary continence recovery and related complications after 1000 procedures. BJU international. 124 (3), 477-486 (2019).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。