
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Атомно-силовая микроскопия Наноиндентирование на основе кантилеверов: измерения механических свойств на наноуровне в воздухе и жидкости
В этой статье
Резюме
Количественная оценка площади контакта и силы, приложенной наконечником зонда атомно-силового микроскопа (АСМ) к поверхности образца, позволяет определять наноразмерные механические свойства. Обсуждаются лучшие практики реализации наноиндентирования на основе консолей АСМ в воздухе или жидкости на мягких и твердых образцах для измерения модуля упругости или других наномеханических свойств.
Аннотация
Атомно-силовой микроскоп (АСМ) фундаментально измеряет взаимодействие между наноразмерным наконечником зонда АСМ и поверхностью образца. Если сила, приложенная наконечником зонда, и площадь его контакта с образцом могут быть количественно определены, можно определить наноразмерные механические свойства (например, упругость или модуль Юнга) исследуемой поверхности. Здесь представлена подробная процедура проведения количественных экспериментов по наноиндентированию на основе кантилеверов на основе АСМ с репрезентативными примерами того, как этот метод может быть применен для определения модулей упругости самых разных типов образцов, начиная от кПа и заканчивая ГПа. К ним относятся живые мезенхимальные стволовые клетки (МСК) и ядра в физиологическом буфере, залитые смолой обезвоженные поперечные сечения сосны и сланцы Баккена различного состава.
Кроме того, наноиндентирование на основе консолей AFM используется для исследования прочности на разрыв (т.е. силы прорыва) фосфолипидных бислоев. Обсуждаются важные практические соображения, такие как выбор и разработка метода, выбор и калибровка зонда, идентификация интересующей области, гетерогенность образца, размер элемента и соотношение сторон, износ наконечника, шероховатость поверхности, а также анализ данных и статистика измерений, чтобы помочь правильной реализации метода. Наконец, продемонстрирована совместная локализация наномеханических карт, полученных на основе АСМ, с методами электронной микроскопии, которые предоставляют дополнительную информацию об элементном составе.
Введение
Понимание механических свойств материалов является одной из наиболее фундаментальных и важных задач в машиностроении. Для анализа свойств сыпучих материалов существует множество методов характеристики механических свойств систем материалов, включая испытания на растяжение 1, испытания на сжатие2 и испытанияна трех- или четырехточечный изгиб (изгиб)3. Хотя эти микромасштабные испытания могут предоставить бесценную информацию о свойствах сыпучих материалов, они, как правило, проводятся до отказа и, следовательно, являются разрушительными. Кроме того, им не хватает пространственного разрешения, необходимого для точного исследования микро- и наноразмерных свойств многих материальных систем, представляющих интерес сегодня, таких как тонкие пленки, биологические материалы и нанокомпозиты. Чтобы начать решать некоторые проблемы крупномасштабных механических испытаний, главным образом их разрушительного характера, из минералогии были заимствованы испытания на микротвердость. Твердость - это мера сопротивления материала пластической деформации в определенных условиях. Как правило, в тестах на микротвердость используется жесткий зонд, обычно изготовленный из закаленной стали или алмаза, для вдавливания в материал. Полученная глубина вдавливания и/или площадь затем могут быть использованы для определения твердости. Было разработано несколько методов, в том числе твердость по Виккерсу4, Кнупу5 и Бринеллю6; Каждый из них обеспечивает меру твердости материала в микромасштабе, но при разных условиях и определениях, и как таковой дает только данные, которые можно сравнить с испытаниями, проведенными в тех же условиях.
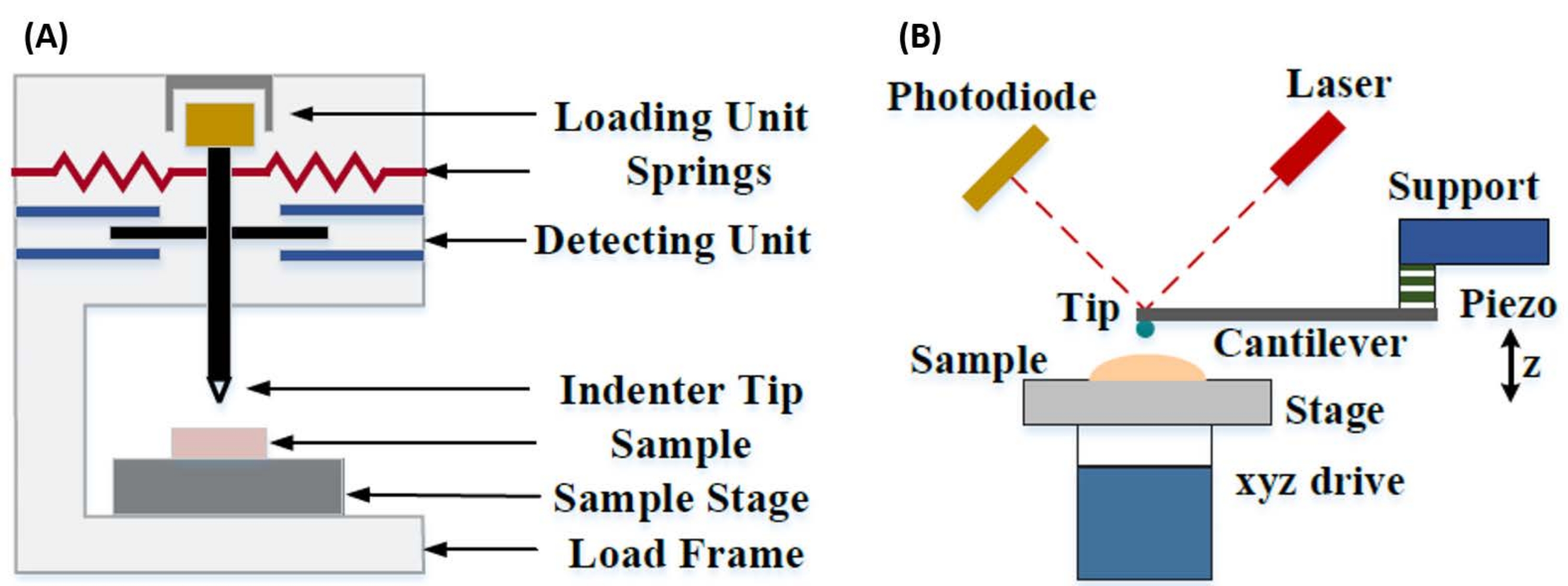
Инструментальное наноиндентирование было разработано для улучшения относительных значений, полученных с помощью различных методов испытаний на микротвердость, улучшения пространственного разрешения, возможного для анализа механических свойств, и обеспечения анализа тонких пленок. Важно отметить, что, используя метод, впервые разработанный Оливером и Фарром7, упругость или модуль Юнга, E, образца материала может быть определен с помощью инструментального наноиндентирования. Кроме того, используя трехсторонний пирамидальный наноинденторный зонд Берковича (чья идеальная функция площади наконечника совпадает с функцией четырехстороннего пирамидального зонда Виккерса)8, можно провести прямое сравнение между наноразмерными и более традиционными микромасштабными измерениями твердости. С ростом популярности АСМ наноиндентирование на основе консоли АСМ также стало привлекать внимание, особенно для измерения механических свойств более мягких материалов. В результате, как схематично показано на рисунке 1, двумя наиболее часто используемыми сегодня методами для опроса и количественной оценки наноразмерных механических свойств являются инструментальное наноиндентирование (рис. 1A) и наноиндентирование на основе консоли AFM (рис. 1B)9, последний из которых находится в центре внимания этой работы.

Рисунок 1: Сравнение инструментальных и консольных систем наноиндентирования на основе АСМ. Принципиальные схемы, изображающие типичные системы для проведения (А) инструментального наноиндентирования и (Б) наноиндентирования на основе АСМ на основе консоли. Эта цифра была изменена по сравнению с Qian et al.51. Аббревиатура: АСМ = атомно-силовая микроскопия. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
Как инструментальное, так и консольное наноиндентирование на основе АСМ используют жесткий зонд для деформации интересующей поверхности образца и контроля результирующей силы и смещения в зависимости от времени. Как правило, желаемый профиль нагрузки (т.е. силы) или (Z-пьезо) смещения задается пользователем через программный интерфейс и непосредственно управляется прибором, в то время как другой параметр измеряется. Механическим свойством, наиболее часто получаемым в результате экспериментов по наноиндентированию, является модуль упругости (E), также называемый модулем Юнга, который имеет единицы давления. Модуль упругости материала является фундаментальным свойством, относящимся к жесткости связи, и определяется как отношение растягивающего или сжимающего напряжения (σ, приложенная сила на единицу площади) к осевой деформации (ε, пропорциональная деформация вдоль оси вдавливания) во время упругой (т.е. обратимой или временной) деформации до начала пластической деформации (уравнение [1]):
 (1)
(1)
Следует отметить, что, поскольку многие материалы (особенно биологические ткани) на самом деле являются вязкоупругими, в действительности (динамический или сложный) модуль состоит как из упругих (хранение, в фазе), так и вязких (потеря, вне фазы) компонентов. На практике в эксперименте по наноиндентированию измеряется приведенный модуль Е *, который связан с истинным интересующим модулем выборки, Е, как показано в уравнении (2):
 (2)
(2)
Где наконечник E и наконечник ν — модуль упругости и отношение Пуассона, соответственно, наконечника наноиндентора, а ν — расчетное отношение Пуассона образца. Коэффициент Пуассона представляет собой отрицательное отношение поперечной к осевой деформации и, следовательно, указывает степень поперечного удлинения образца при воздействии осевой деформации (например, при наноиндентификационной нагрузке), как показано в уравнении (3):
 (3)
(3)
Преобразование из приведенного модуля в фактический необходимо, потому что: а) часть осевой деформации, создаваемой наконечником индентора, может быть преобразована в поперечную деформацию (т.е. образец может деформироваться за счет расширения или сжатия перпендикулярно направлению нагрузки), и б) наконечник индентора не является бесконечно твердым, и, таким образом, акт вдавливания образца приводит к некоторой (небольшой) величине деформации наконечника. Обратите внимание, что в случае, когда наконечник E >> E (т. е. наконечник индентора намного тверже образца, что часто верно при использовании алмазного зонда), соотношение между приведенным и фактическим модулем образца значительно упрощается до E ≈ E*(1 - v2). В то время как инструментальное наноиндентирование превосходит его с точки зрения точной характеристики силы и динамического диапазона, наноиндентирование на основе консоли АСМ происходит быстрее, обеспечивает на порядки большую чувствительность к силе и смещению, обеспечивает визуализацию с более высоким разрешением и улучшенное определение местоположения вдавливания, а также может одновременно исследовать наноразмерные магнитные и электрические свойства9. В частности, консольное наноиндентирование на основе АСМ превосходит количественное определение механических свойств на наноуровне мягких материалов (например, полимеров, гелей, липидных бислоев и клеток или других биологических материалов), чрезвычайно тонких (суб-мкм) пленок (где субсубтрейные эффекты могут вступать в игру в зависимости от глубины вдавливания)10,11 и взвешенных двумерных (2D) материалов12,13,14, таких как графен 15,16, слюда 17, гексагональный нитрид бора (h-BN)18 или дихалькогениды переходных металлов (TMDC; например, MoS2)19. Это связано с его исключительной чувствительностью к силе (sub-nN) и смещению (sub-nm), что важно для точного определения начальной точки контакта и сохранения в области упругой деформации.
При наноиндентировании на основе консолей АСМ смещение зонда АСМ к поверхности образца приводится в действие калиброванным пьезоэлектрическим элементом (рис. 1B), при этом гибкий кантилевер в конечном итоге изгибается из-за силы сопротивления, возникающей при контакте с поверхностью образца. Этот изгиб или отклонение кантилевера обычно контролируется путем отражения лазера от задней части кантилевера в фотодетектор (позиционно-чувствительный детектор [PSD]). В сочетании со знанием жесткости консоли (в нН/нм) и чувствительности к прогибу (в нм/В) можно преобразовать это измеренное консольное отклонение (в V) в силу (в нН), приложенную к образцу. После контакта разница между Z-пьезодвижением и прогибом консоли дает глубину вдавливания образца. В сочетании со знанием функции площади наконечника это позволяет рассчитать площадь контакта наконечника с образцом. Наклон контактных частей результирующих кривых «сила-расстояние» или «сила-смещение» (F-D) может быть затем подогнан с использованием соответствующей модели контактной механики (см. раздел «Анализ данных ») для определения наномеханических свойств образца. В то время как наноиндентирование на основе АСМ на основе консолей обладает некоторыми явными преимуществами по сравнению с инструментальным наноиндентированием, как описано выше, оно также представляет несколько практических проблем реализации, таких как калибровка, износ наконечника и анализ данных, которые будут обсуждаться здесь. Другим потенциальным недостатком наноиндентирования на основе кантилеверов на основе АСМ является предположение о линейной упругости, поскольку радиус контакта и глубина вдавливания должны быть намного меньше радиуса индентора, чего может быть трудно достичь при работе с наноразмерными зондами АСМ и/или образцами, демонстрирующими значительную шероховатость поверхности.
Традиционно наноиндентирование было ограничено отдельными местами или экспериментами по вдавливанию с небольшой сеткой, в которых выбирается желаемое местоположение (т.е. область интереса [ROI]) и выполняется один контролируемый отступ, несколько отступов в одном месте, разделенных некоторым временем ожидания, и/или грубая сетка отступов выполняется со скоростью порядка Гц. Тем не менее, последние достижения в области АСМ позволяют одновременно получать механические свойства и топографию за счет использования высокоскоростных режимов визуализации на основе кривых силы (называемых различными торговыми наименованиями в зависимости от производителя системы), в которых кривые силы проводятся с частотой кГц под управлением нагрузкой, при этом максимальная сила наконечника образца используется в качестве заданного значения изображения. Также были разработаны методы «наведи и стреляй», позволяющие получать топографическое изображение АСМ с последующим селективным наноиндентированием в точках интереса на изображении, обеспечивая наноразмерный пространственный контроль над местоположением наноиндентирования. Несмотря на то, что это не является основным направлением этой работы, конкретные избранные примеры применения как визуализации на основе кривой силы, так и наноиндентирования на основе консолей «наведи и стреляй» представлены в репрезентативных результатах и могут использоваться в сочетании с протоколом, изложенным ниже, если он доступен на конкретной используемой платформе АСМ. В частности, в этой работе описывается обобщенный протокол для практической реализации наноиндентирования на основе консолей АСМ на любой способной системе АСМ и приводятся четыре примера использования (два в воздухе, два в жидкости) метода, включая репрезентативные результаты и подробное обсуждение нюансов, проблем и важных соображений для успешного использования метода.
протокол
ПРИМЕЧАНИЕ: Из-за большого разнообразия коммерчески доступных АСМ и разнообразия типов образцов и применений, которые существуют для наноиндентирования на основе консолей, следующий протокол намеренно разработан так, чтобы носить относительно общий характер, фокусируясь на общих этапах, необходимых для всех экспериментов по наноиндентированию на основе консолей, независимо от прибора или производителя. Из-за этого авторы предполагают, что читатель обладает, по крайней мере, базовым знакомством с работой с конкретным инструментом, выбранным для выполнения наноиндентирования на основе консоли. Тем не менее, в дополнение к общему протоколу, описанному ниже, в качестве дополнительного материала включена подробная пошаговая стандартная операционная процедура (СОП), специфичная для АСМ и используемого здесь программного обеспечения (см. Таблицу материалов), ориентированная на наноиндентирование образцов в жидкости на основе консолей.
1. Пробоподготовка и настройка прибора
- Подготовьте образец таким образом, чтобы свести к минимуму шероховатость поверхности (в идеале в нанометровом масштабе, ~ в 10 раз меньше предполагаемой глубины вдавливания) и загрязнение без изменения механических свойств интересующей области (областей).
- Выберите подходящий зонд АСМ для наноиндентирования предполагаемого образца в зависимости от среды (т. е. воздуха или жидкости), ожидаемого модуля упругости, топографии образца и соответствующих размеров элементов (см. рекомендации по выбору зонда в обсуждении). Нагрузите зонд на держатель щупа (см. Таблицу материалов) и прикрепите держатель зонда к сканирующей головке AFM.
- Выберите подходящий режим наноиндентирования в программном обеспечении AFM, который позволяет пользователю управлять отдельными пандусами (т. е. кривыми смещения силы).
ПРИМЕЧАНИЕ: Конкретный режим будет отличаться у разных производителей АСМ и отдельных приборов (см. СОП, приведенную в Дополнительных материалах для получения более подробной информации и конкретного примера). - Совместите лазер с задней стороны консоли датчика, напротив расположения наконечника датчика и с PSD.
ПРИМЕЧАНИЕ: См. пример применения мезенхимальных стволовых клеток для получения более подробной информации о важных соображениях при выравнивании лазера и проведении наноиндентирования в жидкости, в частности, избегая плавающего мусора и/или пузырьков воздуха, которые могут рассеивать или преломлять луч. Оптика АСМ также может нуждаться в регулировке, чтобы компенсировать показатель преломления жидкости и избежать столкновения зонда при зацеплении поверхности.- Отцентрируйте пятно лазерного луча на задней части кантилевера, максимизировав суммарное напряжение (рис. 2A).
- Центрируйте отраженное пятно лазерного луча на PSD, регулируя сигналы отклонения X и Y (т. е. горизонтальные и вертикальные) так, чтобы они были как можно ближе к нулю (рис. 2A), тем самым обеспечивая максимальный обнаруживаемый диапазон отклонения для создания выходного напряжения, пропорционального отклонению кантилевера.
- Если вы не уверены в топографии образца, шероховатости поверхности и/или поверхностной плотности (в случае чешуек или частиц), выполните топографическое сканирование АСМ перед любыми экспериментами по наноиндентированию, чтобы подтвердить пригодность образца, как описано в шаге 1.1 и части обсуждения, посвященной подготовке пробы.

Рисунок 2: Монитор детектора, чувствительный к положению. (A) Дисплей PSD, показывающий, что лазер правильно выровнен и отражается от задней части контактной консоли зонда в центр PSD (о чем свидетельствует большое суммарное напряжение и отсутствие вертикального или горизонтального отклонения) до попадания на поверхность образца (т.е. зонд не контактирует с образцом). (B) Напряжение вертикального отклонения увеличивается при отклонении консоли (например, при контакте зонда с образцом). Сокращения: PSD = позиционно-чувствительный детектор; VERT = вертикальный; HORIZ = по горизонтали; AMPL = амплитуда; n/a = не применяется. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
2. Калибровка зонда
ПРИМЕЧАНИЕ: Для количественной оценки механических свойств образца с использованием данных кривой F-D, собранных во время наноиндентирования на основе консоли, необходимы три значения: чувствительность к отклонению (DS) консольной/ PSD-системы (нм/В или В/нм), константа консольной пружины (нН/нм) и площадь контакта зонда, часто выражаемая в терминах эффективного радиуса наконечника зонда (нм) при заданной глубине вдавливания, меньшей радиуса зонда в случае сферического зонда кончик.
- Откалибруйте DS системы зонд/АСМ, надавливая на чрезвычайно твердый материал (например, сапфир, E = 345 ГПа) таким образом, чтобы свести к минимуму деформацию образца и, таким образом, измеренное Z-движение пьезо после начала контакта наконечника с образцом преобразуется исключительно в консольное отклонение.
ПРИМЕЧАНИЕ: Калибровка DS должна выполняться в тех же условиях, что и запланированные эксперименты по наноиндентированию (т.е. температура, среда и т.д.), чтобы точно отражать DS системы во время экспериментов. Для максимальной точности может потребоваться длительный (30 минут) период прогрева лазера, чтобы дать время для достижения теплового равновесия и установления стабильной выходной мощности лазера и стабильности наведения. DS необходимо повторно измерять каждый раз, когда лазер перестраивается, даже если используется один и тот же датчик, так как DS зависит от интенсивности лазера и положения на консоли, а также от качества отражения от датчика (т. е. деградация покрытия задней стороны датчика повлияет на DS) и чувствительности PSD20.- Установите и выполните калибровочные отступы DS на сапфире, чтобы получить примерно такое же отклонение зонда (в V или нм), что и запланированные отступы образца, поскольку измеренное смещение является функцией угла отклонения наконечника и становится нелинейным для больших отклонений.
- Определите DS (в нм/В) или, альтернативно, обратную чувствительность оптического рычага (в В/нм) по наклону линейной части контактного режима после начальной точки контакта на результирующей кривой F-D, как показано на рисунке 3A.
- Повторите рампу не менее 5 раз, записывая каждое значение DS. Используйте среднее значение значений для максимальной точности. Если относительное стандартное отклонение (RSD) измерений превышает ~ 1%, повторно измерьте DS, так как иногда первые несколько кривых F-D неидеальны из-за первоначального введения адгезионных сил.
- Если константа пружины консоли, k, не откалибрована на заводе (например, с помощью лазерной доплеровской виброметрии [LDV]), откалибруйте постоянную пружины.
ПРИМЕЧАНИЕ: Метод тепловой настройки оптимален для относительно мягких консолей с k < 10 Н/м (см. раздел обсуждения о пружинной постоянной для списка и описания альтернативных методов, особенно для жестких консолей с k > 10 Н/м). Как показано на рисунке 3B, C, термонастройка обычно интегрирована в управляющее программное обеспечение AFM.
- Если зонд не поставляется с откалиброванным на заводе измерением радиуса наконечника (например, с помощью сканирующего электронного микроскопа [SEM]), измерьте эффективный радиус наконечника, R.
ПРИМЕЧАНИЕ: Существует два распространенных метода измерения радиуса наконечника (см. соответствующий раздел обсуждения), но наиболее распространенным для наконечников зонда нанометрового масштаба является метод реконструкции слепого наконечника (BTR), в котором используется стандарт шероховатости (см. Таблицу материалов), содержащий многочисленные чрезвычайно четкие (субнм) особенности, которые служат для эффективного изображения наконечника, а не наконечника для визуализации образца.- При использовании метода BTR визуализируйте образец шероховатости (характеристика наконечника), используя медленную частоту сканирования (<0,5 Гц) и высокий коэффициент усиления обратной связи, чтобы оптимизировать отслеживание очень четких объектов. Выберите размер изображения и плотность пикселей (разрешение) в зависимости от ожидаемого радиуса наконечника (например, изображение размером 1024 x 1024 пикселя с площадью 3 мкм x 3 мкм будет иметь боковое разрешение ~3 нм).
- Используйте программное обеспечение для анализа изображений АСМ (см. Таблицу материалов) для моделирования наконечника зонда и оценки его конечного радиуса и эффективного диаметра наконечника при ожидаемой глубине вдавливания образца, как показано на рисунке 3D-F.
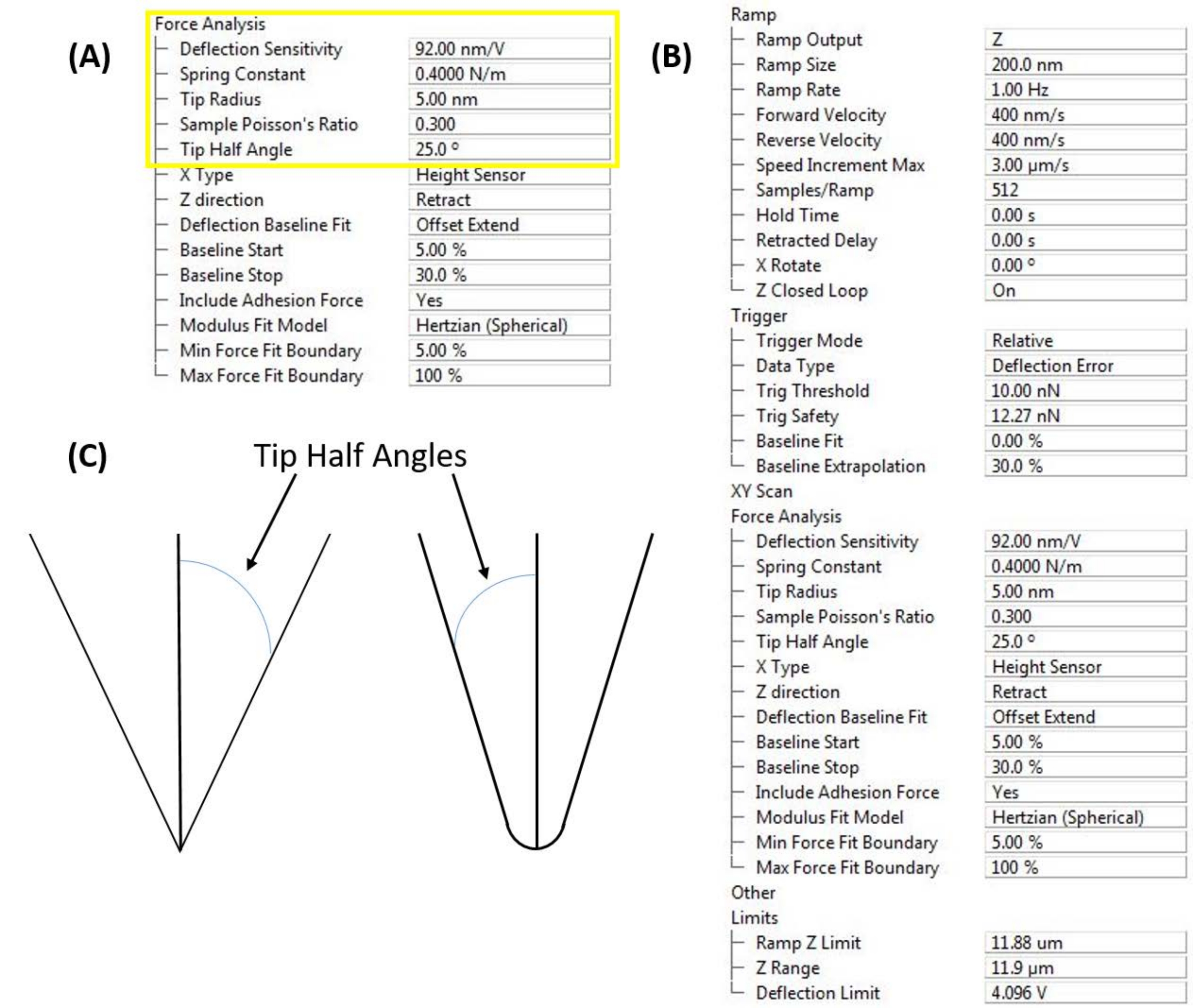
- После завершения калибровки датчика введите значения DS, k и R в программное обеспечение прибора, как показано на рисунке 4A.
- Введите оценку коэффициента Пуассона образца, ν, чтобы можно было преобразовать измеренный приведенный модуль в фактический модуль образца9. При использовании модели конической или конисферической контактной механики, основанной на форме наконечника и глубине вдавливания, также необходимо ввести полуугол наконечника (рис. 4C).
ПРИМЕЧАНИЕ: Модуль относительно нечувствителен к небольшим ошибкам или неопределенностям в расчетном коэффициенте Пуассона. Оценка ν = 0,2-0,3 является хорошей отправной точкой для многих материалов21.
- Введите оценку коэффициента Пуассона образца, ν, чтобы можно было преобразовать измеренный приведенный модуль в фактический модуль образца9. При использовании модели конической или конисферической контактной механики, основанной на форме наконечника и глубине вдавливания, также необходимо ввести полуугол наконечника (рис. 4C).

Рисунок 3: Калибровка зонда. А) Определение чувствительности к прогибу. Результат репрезентативного измерения чувствительности к прогибу, проведенного на сапфировой подложке (E = 345 ГПа) для стандартного датчика режима нарезания резьбы (номинальное k = 42 Н/м; см. Таблицу материалов) с отражающим алюминиевым покрытием с обратной стороны. Показаны измеренные кривые захода на посадку (синяя трасса) и втягивания или отвода (красная трасса). Измеренная чувствительность к отклонению 59,16 нм/В была определена путем подгонки кривой захода на посадку между точками защелкивания контакта и разворота, на что указывает область между вертикальными пунктирными красными линиями. Область отрицательного отклонения, видимая на кривой втягивания/отвода до отрыва от поверхности, указывает на адгезию наконечника к образцу. (В,В) Термотюнинг. Репрезентативные спектры кантилевера теплового шума (синие следы) с соответствующими соответствиями (красные следы) для двух разных зондов. (B) Настройка тепловой настройки и параметры подгонки для стандартного датчика АСМ на основе кривой силы (см. Таблицу материалов) с его номинальной постоянной пружины k = 0,4 Н/м, используемой в качестве начального предположения. Подгонка спектра консольного теплового шума дает фундаментальную резонансную частоту f 0 = 79,8 кГц, что достаточно хорошо согласуется с номинальным значением f0 = 70 кГц. Измеренный добротность равен 58,1. Доброта подгонки (R2 = 0,99) основана на совпадении соответствия с данными между двумя вертикальными пунктирными красными линиями. Обратите внимание, что для получения точных результатов важно знать и вводить как температуру окружающей среды, так и чувствительность к отклонению. (C) Консольный спектр теплового шума и соответствующая подгонка (т.е. тепловая настройка) с результирующей расчетной постоянной пружины k = 0,105 Н/м для чрезвычайно мягкого кантилевера, используемого для выполнения наномеханических измерений на живых клетках и изолированных ядрах. Обратите внимание на значительно меньшую частоту собственного резонанса ~2-3 кГц. (Д-Ж) Реконструкция глухого наконечника. Репрезентативный рабочий процесс реконструкции глухого наконечника для зонда с алмазным наконечником (номинальное значение R = 40 нм; см. Таблицу материалов). (D) Изображение образца для определения характеристик наконечника размером 5 мкм x 5 мкм, состоящего из ряда чрезвычайно острых (субнм) титановых шипов, которые служат для изображения наконечника зонда АСМ. е) результирующая реконструированная модель (изображение с перевернутой высотой) наконечника зонда. (F) Результаты подгонки слепого наконечника, включая расчетный радиус конца R = 29 нм и эффективный диаметр наконечника 40 нм при выбранной пользователем высоте 8 нм (т.е. глубина вдавливания << R) от вершины наконечника, рассчитанные путем преобразования площади контакта наконечника с образцом на этой высоте в эффективный диаметр при условии круглого профиля (т.е. A = πr 2 = π(d/2)2) для использования с моделями сферической контактной механики. Сокращения: АСМ = атомно-силовая микроскопия; ETD = эффективный диаметр наконечника. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 4: Входы программного интерфейса. (A) Калибровочные константы зонда. Пользовательский интерфейс программного обеспечения (см. Таблицу материалов) для ввода измеренной чувствительности к прогибу, постоянной пружины и радиуса наконечника для проведения количественных наномеханических измерений. Коэффициент Пуассона как зонда, так и образца необходим для расчета упругости или модуля Юнга образца по кривым силы наноиндентирования на основе консоли. (B) Окно управления рампой. Пользовательский интерфейс программного обеспечения (см. Таблицу материалов) для постановки экспериментов по наноиндентированию на основе консолей, организованных по параметрам, описывающим саму рампу (т. е. профиль вдавливания), запуск прибора (например, управление силой и смещением), последующий анализ силы и пределы движения (для повышения чувствительности измерений за счет сужения диапазона, в котором должен работать аналого-цифровой преобразователь при управлении Z-пьезо и считывании отклонения PSD). (C) Полуугол наконечника (основанный на геометрии зонда или прямом измерении) важен, если используется коническая, пирамидальная или конисферная модель контактной механики (например, Снеддона). Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
3. Сбор данных о силовом смещении (F-D)
ПРИМЕЧАНИЕ: Значения параметров, представленные здесь (см. рис. 4B), могут варьироваться в зависимости от силы и диапазона вдавливания для данного образца.
- Перемещайтесь по образцу под головкой AFM и занимайтесь нужной областью интереса.
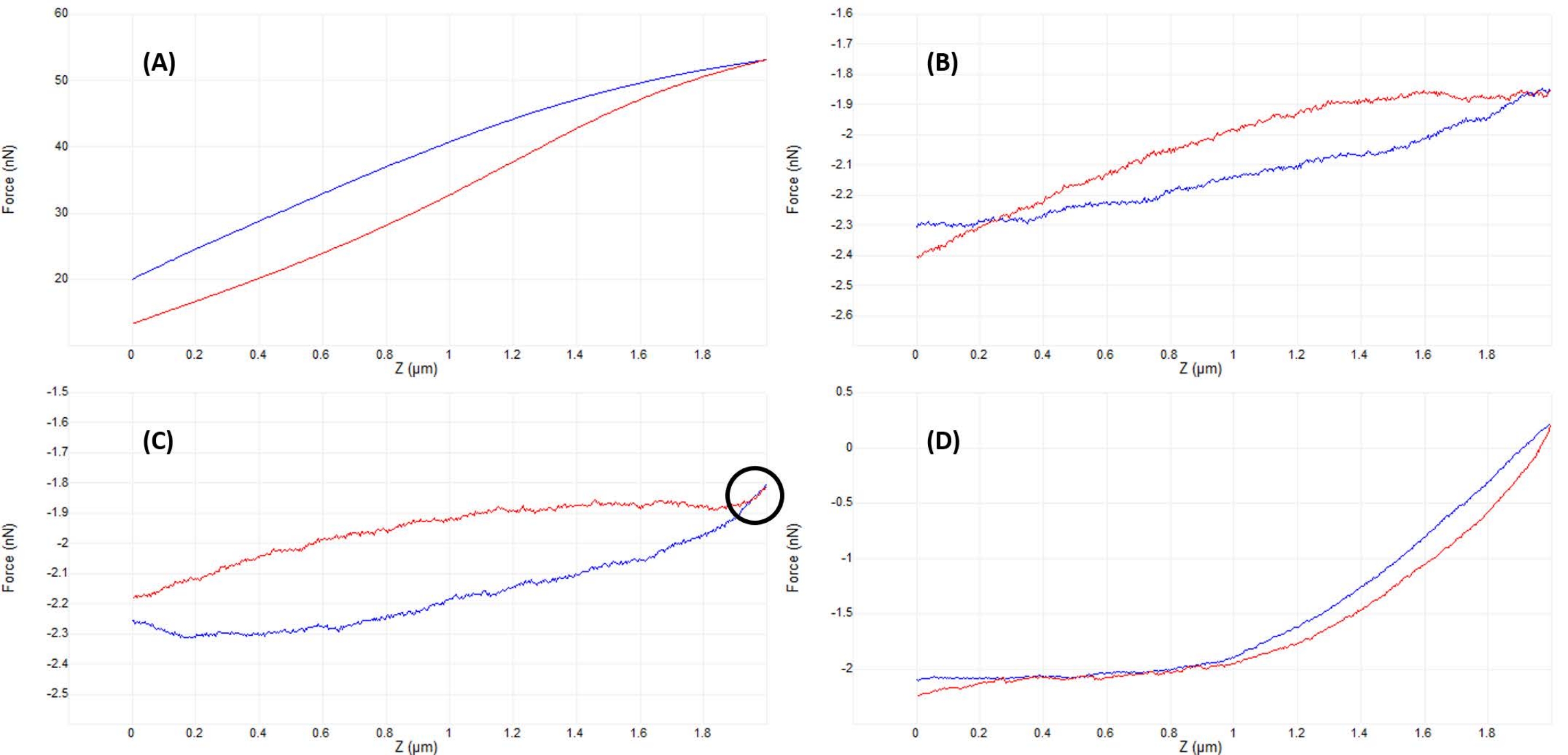
- Следите за сигналом вертикального отклонения (рис. 2B) или выполняйте небольшую (~50-200 нм) начальную рампу (рис. 4B), чтобы убедиться, что наконечник и образец находятся в контакте (см. рис. 5A).
- Отрегулируйте положение головки AFM немного вверх (шагами, соответствующими ~ 50% от полного размера рампы) и снова наклоняйтесь. Повторяйте до тех пор, пока наконечник и образец не выйдут из контакта, о чем свидетельствует почти плоская рампа (рис. 5B) и минимальное вертикальное отклонение консоли (рис. 2A).
- Если нет очевидного взаимодействия наконечника и образца (сравните рис. 2A и рис. 2B), уменьшите головку АСМ на величину, соответствующую ~ 50%-100% размера рампы, чтобы убедиться, что наконечник зонда не врежется в образец при ручном перемещении головки АСМ. Снова набирайте рампу, повторяя до тех пор, пока не будет наблюдаться либо хорошая кривая (рис. 5D), либо кривая, аналогичная рисунку 5C. В последнем случае выполните одну дополнительную небольшую регулировку опускания головки АСМ, равную ~20%-50% от размера рампы, чтобы добиться хорошего контакта и кривой силы, аналогичной показанной на рисунке 5D.
- Отрегулируйте параметры рампы (как описано ниже и показано в разделе Рисунок 4В) для оптимизации прибора, зонда и образца и получения пандусов, аналогичных показанным на рисунке Рисунок 5D.
- Выберите подходящий размер рампы (т. е. общее движение Z-пьезо за один цикл рампы) в зависимости от образца (например, толщины, ожидаемого модуля упругости, шероховатости поверхности) и желаемой глубины вдавливания.
ПРИМЕЧАНИЕ: Для более жестких образцов может произойти меньшая деформация образца (и, следовательно, большее отклонение зонда при данном Z-пьезодвижении), поэтому размер рампы обычно может быть меньше, чем для более мягких образцов. Типичные размеры рампы для жестких образцов и консолей могут составлять десятки нм, в то время как для мягких образцов и консолей рампы могут составлять от сотен нм до нескольких мкм; Конкретные избранные примеры применения представлены в разделе «Репрезентативные результаты». Обратите внимание, что минимальные и максимально возможные размеры рампы зависят от инструмента. - Выберите подходящую частоту нарастания (1 Гц является хорошей отправной точкой для большинства сэмплов).
ПРИМЕЧАНИЕ: Скорость нарастания может быть ограничена электронными скоростями/полосами пропускания управления и/или обнаружения. В сочетании с размером рампы скорость рампы определяет скорость наконечника. Скорость наконечника особенно важно учитывать при вдавливании мягких материалов, где вязкоупругие эффекты могут вызывать артефактыгистерезиса 9,22. - Выберите, следует ли использовать триггерную (управляемую нагрузкой) или нетриггерную (управляемую смещением) рампу.
ПРИМЕЧАНИЕ: При срабатывании рампы система будет приближаться к образцу с заданными пользователем шагами (в зависимости от размера и разрешения рампы или количества точек данных) до тех пор, пока не будет обнаружен желаемый порог срабатывания (т.е. сила заданного значения или консольное отклонение), после чего система втянется в исходное положение и отобразит кривую F-D. На рампе без срабатывания система просто удлиняет Z-пьезо на расстояние, указанное пользователем заданным размером рампы, и отображает измеренную кривую F-D. Триггерные пандусы предпочтительны для большинства случаев использования, но нетриггерные пандусы могут быть полезны при исследовании мягких материалов, которые не имеют четкой, легко идентифицируемой точки контакта.- Если выбрана триггерная рампа , установите порог срабатывания (определяемое пользователем максимально допустимое усилие или отклонение рампы), чтобы привести к желаемому углублению в образец.
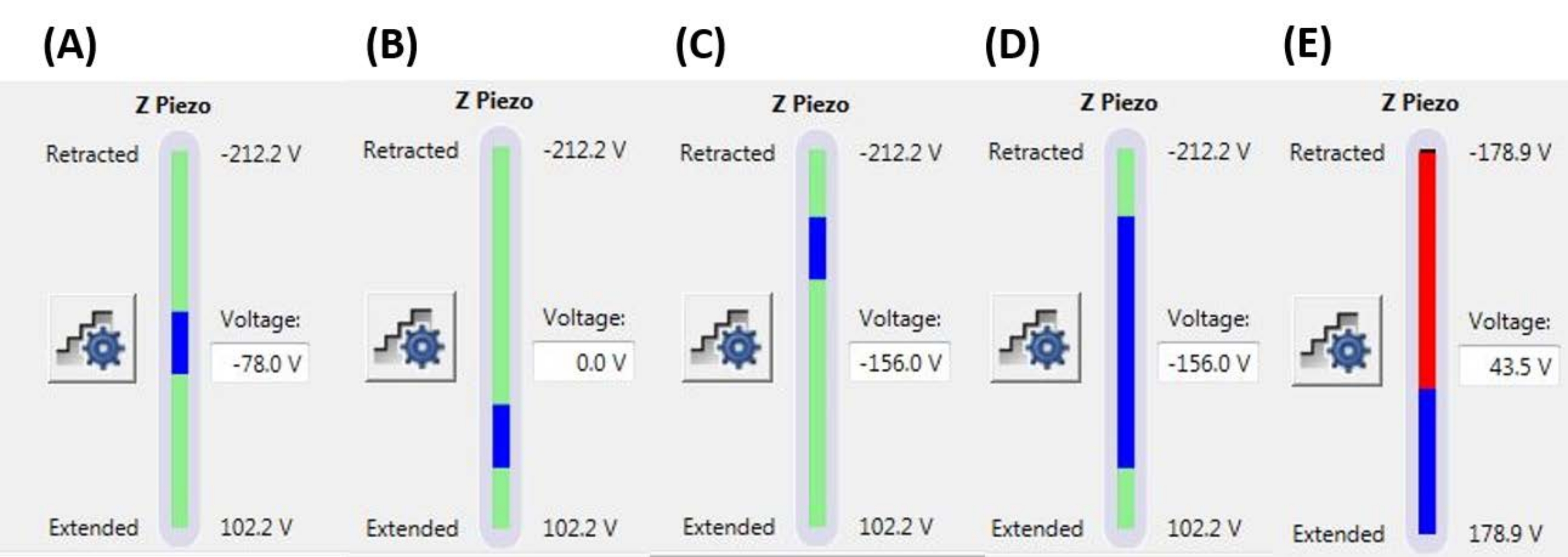
ПРИМЕЧАНИЕ: Использование порога срабатывания означает, что рампа может закончиться (т.е. зонд может начать втягиваться) до того, как будет достигнут указанный полный размер рампы (Z-пьезорасширение). Значения могут варьироваться от нескольких нН до нескольких мкН, в зависимости от системы наконечник-образец. - Установите положение рампы , чтобы определить часть максимального диапазона Z-пьезо, которая будет использоваться для выполнения рампы. Убедитесь, что общий диапазон размеров рампы не начинается и не заканчивается за пределами максимального Z-пьезодиапазона (см. репрезентативные примеры на рисунке 6), в противном случае часть кривой F-D не будет представлять никаких физических измерений (т. е. Z-пьезо будет полностью вытянуто или втянуто, а не двигаться).
- Если выбрана триггерная рампа , установите порог срабатывания (определяемое пользователем максимально допустимое усилие или отклонение рампы), чтобы привести к желаемому углублению в образец.
- Установите количество образцов на рампу (например, 512 образцов на рампу) для достижения желаемого разрешения измерения (т. е. плотности точек кривой F-D).
ПРИМЕЧАНИЕ: Максимальное количество выборок/рампа может быть ограничено программными (размер файла) или аппаратными ограничениями (например, скорость аналого-цифрового [аналого-цифрового] преобразования, в зависимости от скорости нарастания). Также можно ограничить допустимый Z-пьезо или диапазон отклонения (см. параметры пределов на рисунке 4B), чтобы увеличить эффективное разрешение аналого-цифрового преобразователя системы. - Установите X-вращение , чтобы уменьшить усилия сдвига на образце и наконечнике, одновременно слегка перемещая зонд в направлении X (параллельно консоли) и делая отступ в направлении Z (перпендикулярно консоли). Используйте значение для X-поворота, равное углу смещения держателя зонда относительно нормали поверхности (типичное значение 12°).
ПРИМЕЧАНИЕ: X-поворот необходим, потому что консоль установлена в держателе зонда под небольшим углом относительно поверхности, чтобы падающий лазерный луч отражался в PSD. Кроме того, передний и задний углы наконечника зонда могут отличаться друг от друга (т. е. наконечник зонда может быть асимметричным). Более конкретную информацию можно получить у отдельных производителей датчиков и АСМ.
- Выберите подходящий размер рампы (т. е. общее движение Z-пьезо за один цикл рампы) в зависимости от образца (например, толщины, ожидаемого модуля упругости, шероховатости поверхности) и желаемой глубины вдавливания.

Рисунок 5: Оптимизация разделения наконечника и образца после включения для получения хороших кривых силы. Последовательные примеры репрезентативных кривых силового смещения, полученных при вдавливании в жидкость (фосфатно-буферный физиологический раствор) на живое ядро мезенхимальных стволовых клеток с калиброванным мягким кантилевером из нитрида кремния (номинальное k = 0,04 Н/м), оканчивающимся полусферическим наконечником радиусом 5 мкм (см. Таблицу материалов). Кривые были получены в процессе вовлечения поверхности клетки и оптимизации параметров вдавливания, при этом зондовый подход показан синим цветом, а втягивание/отвод - красным. (A) Наконечник уже находится в зацеплении и контакте с образцом до начала рампы, что приводит к большому консольному прогибу и силам без плоской базовой линии предварительного контакта. (B) После ручного перемещения наконечника достаточно далеко от образца несрабатывающая рампа размером 2 мкм приводит к почти плоской кривой F-D (т.е. практически без изменения силы). В условиях окружающей среды кривая будет более плоской, но в жидкости вязкость среды может вызвать небольшие отклонения консольного зонда во время рампы, как показано здесь, даже без контакта с поверхностью. (C) После приближения немного ближе к поверхности до начала рампы кривые подхода и втягивания показывают некоторое увеличение силы (увеличение уклона) вблизи точки поворота рампы (т.е. переход от подхода к уходу). Контрольным признаком, на который следует обратить внимание, является то, что кривые подхода (синий) и отвод (красный) начинают перекрываться (область, обозначенная черным кругом), что указывает на физическое взаимодействие с поверхностью. (D) Идеальная кривая F-D, полученная после оптимизации параметров рампы и приближения немного (~ 1 мкм) ближе к поверхности ячейки, чем в ячейке C, так что зонд проводит примерно половину рампы в контакте с ячейкой , обеспечивая достаточную деформацию для соответствия контактной части кривой приближения и определения модуля упругости. Относительно длинная, плоская базовая линия с низким уровнем шума облегчает алгоритму подгонки определение точки контакта. Аббревиатура: F-D = сила-смещение. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 6: Размер и положение рампы. Z-пьезомонитор, показывающий протяженность рампы (синяя полоса) относительно общего доступного диапазона движения Z-пьезо (зеленая полоса). (A) Z-пьезоположение находится примерно в середине диапазона его движения, на что указывает как синяя полоса, расположенная примерно посередине зеленой полосы, так и текущее Z-пьезонапряжение (-78,0 В), находящееся примерно между его полностью втянутыми (-212,2 В) и расширенными (+102,2 В) значениями. (B) Z-пьезо удлиняется относительно A без приложения напряжения смещения. (C) Z-пьезо втягивается относительно A и B. (D) Z-пьезоположение такое же, как и в C при -156,0 В, но размер рампы был увеличен по сравнению с A-C, чтобы использовать большую часть полного диапазона движения Z-пьезо. € Размер рампы слишком велик для текущего положения рампы, в результате чего Z-пьезо расширяется до конца своего диапазона. Это приведет к тому, что кривая F-D станет плоской, поскольку система не может расширить Z-пьезо дальше. Аббревиатура: F-D = сила-смещение. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
4. Анализ кривой F-D
- Выберите подходящий пакет программного обеспечения для анализа данных. Выберите и загрузите данные для анализа.
ПРИМЕЧАНИЕ: Многие производители АСМ и программы обработки изображений АСМ имеют встроенную поддержку анализа кривой F-D. С другой стороны, повышенная гибкость и возможности специального пакета анализа кривых F-D, такого как программный пакет AtomicJ с открытым исходным кодом, могут быть полезны23, особенно для пакетной обработки и статистического анализа больших наборов данных или реализации сложных моделей контактной механики. - Входные калиброванные значения для постоянной пружины, DS и радиуса наконечника зонда, а также оценки модуля Юнга и коэффициента Пуассона для наконечника зонда (на основе его состава материала) и коэффициента Пуассона образца.
ПРИМЕЧАНИЕ: При использовании индентора с алмазным наконечником можно использовать значения наконечника E = 1140 ГПа и наконечника ν = 0,0721,24,25,26. Для стандартного кремниевого зонда обычно можно использовать наконечник E = 170 ГПа и наконечник ν = 0,27, хотя модуль кремния по модулю Юнга изменяется в зависимости от кристаллографической ориентации27. - Выберите модель механики контакта наноиндентирования, подходящую для наконечника и образца.
ПРИМЕЧАНИЕ: Для многих распространенных моделей сферических наконечников (например, Hertz, Maugis, DMT, JKR) крайне важно, чтобы глубина вдавливания в образец была меньше радиуса наконечника; в противном случае сферическая геометрия наконечника зонда уступает место конической или пирамидальной форме (рис. 4C). Для конических (например, Снеддон28) и пирамидальных моделей угол полунаконечника (т.е. угол между боковой стенкой наконечника и линией, делящей пополам перпендикулярно концу наконечника; Рисунок 4В) должен быть известен и обычно доступен у производителя датчика. Для получения дополнительной информации о моделях контактной механики, пожалуйста, обратитесь к разделу «Анализ данных » на сайте thedDiscussion. - Запустите алгоритм подгонки. Проверьте правильность подгонки кривых F-D; низкая остаточная погрешность, соответствующая среднему значению R 2, близкому к единице (например, R2 > 0,9), обычно указывает на хорошее соответствие выбранной модели29,30. При необходимости проведите выборочную проверку отдельных кривых, чтобы визуально проверить кривую, подгонку модели и вычислить точки контакта (например, см. рисунок 7 и раздел «Анализ данных»).
Результаты
Кривые сила-смещение
На рисунке 7 показаны репрезентативные, почти идеальные кривые F-D, полученные в результате экспериментов по наноиндентированию, проведенных на воздухе на образцах сосны, покрытых смолой (рис. 7A) и в жидкости (фосфатно-буферный физиологиче?...
Обсуждение
Пробоподготовка
Для наноиндентирования на воздухе распространенные методы подготовки включают криосекцию (например, образцов тканей), шлифовку и/или полировку с последующей ультрамикротомией (например, биологические образцы, залитые смолой), ионное измельчение или подгот?...
Раскрытие информации
У авторов нет конфликтов интересов, которые необходимо раскрывать.
Благодарности
Все эксперименты с АСМ проводились в Лаборатории поверхностных наук (SSL) Университета штата Бойсе. Характеристика SEM проводилась в Государственном центре характеристик материалов штата Бойсе (BSCMC). Исследования, представленные в этой публикации в отношении сырья для биотоплива, были частично поддержаны Министерством энергетики США, Управлением по энергоэффективности и возобновляемым источникам энергии, Управлением биоэнергетических технологий в рамках Консорциума интерфейса преобразования сырья (FCIC) и в соответствии с контрактом Операционного офиса Министерства энергетики Айдахо DE-AC07-051ID14517. Исследования клеточной механики были поддержаны Национальными институтами здравоохранения (США) в рамках грантов AG059923, AR075803 и P20GM109095, а также грантами Национального научного фонда (США) 1929188 и 2025505. Работа над модельными липидными бислойными системами была поддержана Национальными институтами здравоохранения (США) в рамках гранта R01 EY030067. Авторы благодарят доктора Элтона Грауннарда за создание составного изображения, показанного на рисунке 11.
Материалы
| Name | Company | Catalog Number | Comments |
| Atomic force microscope | Bruker | Dimension Icon | Uses Nanoscope control software, including PeakForce Quantitative Nanomechanical Mapping (PF-QNM), FastForce Volume (FFV), and Point-and-Shoot Ramping experimental workspaces |
| AtomicJ | American Institute of Physics | https://doi.org/10.1063/1.4881683 | Flexible, powerful, free open source Java-based force curve analysis software package. Supports numerous contact mechanic models, such as Hertz, Sneddon DMT, JKR, Maugis, and cone or pyramid (including blunt and truncated). Also includes a variety of initial contact point estimation methods to choose from. Supports batch processing of data and subsequent statistical analysis (e.g., averages, standard deviations, histograms, goodness of fit, etc.). Literature citation is: P. Hermanowicz, M. Sarna, K. Burda, and H. Gabry , “AtomicJ: An open source software for analysis of force curves” Rev. Sci. Instrum. 85: 063703 (2014), https://doi.org/10.1063/1.4881683 , “AtomicJ: An open source software for analysis of force curves” Rev. Sci. Instrum. 85: 063703 (2014), https://doi.org/10.1063/1.4881683 |
| Buffer solution (PBS) | Fisher Chemical (NaCl), Sigma Aldrich (KCl), Fisher BioReagents (Na2HPO4 and KH2PO4) | S271 (>99% purity NaCl), P9541 (>99% purity KCl), BP332(>99% purity Na2HPO4), BP362 (>99% purity KH2PO4) | Phosphate buffered saline (PBS) was prepared in the laboratory as an aqueous solution consisting of 137 mM NaCl, 2.7 mM KCl, 10 mM Na2HPO4, and 1.8 mM KH2PO4 dissolved in ultrapure water. Reagents were measured out using an analytical balance, and glassware was cleaned with soap and water followed by autoclaving immediately prior to use. |
| Chloroform | |||
| Diamond tip AFM probe | Bruker | PDNISP | Pre-mounted factory-calibrated cube corner diamond (E = 1140 GPa) tip AFM probe (nominal R = 40 nm) with a stainless steel cantilever (nominal k = 225 N/m, f0 = 50 kHz). Spring constant is measured at the factory (k = 256 N/m for the probe, Serial #13435414, used here) and calibration data (including AFM images of indents showing probe geometry) is provided with the probe. |
| Diamond ultramicrotome blade | Diatome | Ultra 35° | 2.1 mm width. Also used a standard glass blade for intial rough cut of sample surface before transitioning to diamond blade for final surface preparation |
| Epoxy | Gorilla Glue | 26853-31-6 | Epoxy resin and hardner were mixed in a 1:1 ratio, a small drop was placed on a stainless steel sample puck (Ted Pella), and V1 grade muscovite mica (Ted Pella) was attached to create an atomically flat surface for preparation of phospholipid membranes. |
| Ethanol | |||
| LR white resin, medium grade (catalyzed) | Electron Microscopy Sciences | 14381 | 500 mL bottle, Lot #150629 |
| Mesenchymal stem cells (MSCs) | N/A | N/A | MSCs for nanomechanical studies were primary cells harvested from 8-10 week old male C57BL/6 mice as described in Goelzer, M. et al. "Lamin A/C Is Dispensable to Mechanical Repression of Adipogenesis" Int J Mol Sci 22: 6580 (2021) doi:10.3390/ijms22126580 and Peister, A. et al. "Adult stem cells from bone marrow (MSCs) isolated from different strains of inbred mice vary in surface epitopes, rates of proliferation, and differentiation potential" Blood 103: 1662-1668 (2004), doi:10.1182/blood-2003-09-3070. |
| Modulus standards | Bruker | PFQNM-SMPKIT-12M | Used HOPG (E = 18 GPa) and PS (E = 2.7 GPa). Also contains 2x PDMS (Tack 0, E = 2.5 MPa; Tack 4, E = 3.5 MPa), PS-LDPE (E = 2.0/0.2 GPa), fused silica (E = 72.9 GPa), sapphire (E - 345 GPa), and tip characterization (titanium roughness) sample. All samples come pre-mounted on a 12 mm diameter steel disc (sample puck). |
| Muscovite mica | Ted Pella | 50-12 | 12 mm diameter, V1 grade muscovite mica |
| Nanscope Analysis | Bruker | Version 2.0 | Free AFM image processing and analysis software package, but designed for, and proprietary/limited to Bruker AFMs; similar functionality is available from free, platform-independent AFM image processing and analysis software packages such as Gwyddion, WSxM, and others. Has built-in capabilities for force curve analysis, but AtomicJ is more flexible/full featured (e.g., more built-in contact mechanics models to choose from, statistical analysis of force curve fitting results, etc.) for force curve analysis and handles batch processing of force curves. |
| Phospholipids: POPC, Cholesterol (ovine) | Avanti Polar Lipids | POPC: CAS # 26853-31-6, Cholesterol: CAS # 57-88-5 | POPC lipid dissolved in chloroform (25 mg/mL) was obtained from vendor and used without further purification. Cholesterol powder from the same vendor was dissolved in chloroform (20 mg/mL). |
| Probe holder (fluid, lipid bilayers) | Bruker | MTFML-V2 | Specific to the particular AFM used; MTFML-V2 is a glass probe holder for scanning in fluid on a MultiMode AFM. |
| Probe holder (fluid, MSCs) | Bruker | FastScan Bio Z-scanner | Used with Dimension FastScan head (XY flexure scanners). Serial number MXYPOM5-1B154. |
| Probe holder (standard, ambient) | Bruker | DAFMCH | Specific to the particular AFM used; DAFMCH is the standard contact and tapping mode probe holder for the Dimension Icon AFM, suitable for nanoindentation (PF-QNM, FFV, and point-and-shoot ramping) |
| Sample Puck | Ted Pella | 16218 | Product number is for 15 mm diameter stainless steel sample puck. Also available in 6 mm, 10 mm, 12 mm, and 20 mm diameters at https://www.tedpella.com/AFM_html/AFM.aspx#anchor842459 |
| Sapphire substrate | Bruker | PFQNM-SMPKIT-12M | Extremely hard surface (E = 345 GPa) for measuring deflection sensitivity of probes (want all of the deflection to come from the probe, not the substrate). Part of the PF-QNM/modulus standards kit. |
| Scanning electron microscope | Hitachi | S-3400N-II | Located at Boise State. Used to perform co-localized SEM/EDS on all samples except additively manufactured (AM) Ti-6Al-4V. |
| Silicon AFM probes (standard) | NuNano | Scout 350 | Standard tapping mode silicon probe with reflective aluminum backside coating; k = 42 N/m (nominal), f0 = 350 kHz. Nominal R = 5 nm. Also available uncoated or with reflective gold backside coating. Probes with similar specifications are available from other manufacturers (e.g., Bruker TESPA-V2). |
| Silicon AFM probes (stiff) | Bruker | RTESPA-525, RTESPA-525-30 | Rotated tip etched silicon probes with reflective aluminum backside coating; k = 200 N/m (nominal), f0 = 525 kHz. Nominal R = 8 nm for RTESPA-525, R = 30 nm for RTESPA-525-30. Spring constant of each RTESPA-525-30 is measured individually at the factory via laser Doppler vibrometry and supplied with the probe. |
| Silicon carbide grit paper (abrasive discs) | Allied | 50-10005 | 120 grit |
| Silicon nitride AFM probes (soft, large radius hemispherical tip) | Bruker | MLCT-SPH-5UM, MLCT-SPH-5UM-DC | Also MLCT-SPH-1UM-DC. New product line of factory-calibrated (probe radius and spring constants of all cantilevers) large radius (R = 1 or 5 mm) hemispherical tip (at the end of a 23 mm long cylindrical shaft) probes. DC = drift compensation coating. 6 cantilevers/probe (A-F). Nominal spring constants: A, k = 0.07 N/m; B, k = 0.02 N/m; C, k = 0.01 N/m; D, k = 0.03 N/m; E, k = 0.1 N/m; F, k = 0.6 N/m. |
| Silicon nitride AFM probes (soft, medium sharp tip) | Bruker | DNP | 4 cantilevers/probe (A-d). Nominal spring constants: A, k = 0.35 N/m; B, k = 0.12 N/m; C, k = 0.24 N/m; D, k = 0.06 N/m. Nominal radii of curvature, R = 10 nm. |
| Silicon nitride AFM probes (soft, sharp tip) | Bruker | ScanAsyst-Air | Nominal values: resonance frequency, f0 = 70 kHz; spring constant, k = 0.4 N/m; radius of curvature, R = 2 nm. Designed for force curve based AFM imaging. |
| Superglue | Henkel | Loctite 495 | Cyanoacrylate based instant adhesive. Lots of roughly equivalent products are readily available. |
| Syringe pump | New Era Pump Systems | NE1000US | One channel syringe pump system with infusion and withdrawal capacity |
| Tip characterization standard | Bruker | PFQNM-SMPKIT-12M | Titanium (Ti) roughness standard. Part of the PF-QNM/modulus standards kit. |
| Ultrahigh purity nitrogen (UHP N2), 99.999% | Norco | SPG TUHPNI - T | T size compressed gas cylinder of ultrahigh purity (99.999%) nitrogen for drying samples |
| Ultramicrotome | Leica | EM UC6 | Equipped with a glass blade (standard, for intial sample preparation) and a diamond blade (for final preparation) |
| Ultrapure water | Thermo Fisher | Barnstead Nanopure Model 7146 | Model has been discontinued, but equivalent products are available. Produces ≥18.2 MΩ*cm ultrapure water with 1-5 ppb TOC (total organic content), per inline UV monitoring. Includes 0.2 µm particulate filter, ion exchange columns, and UV oxidation chamber. |
| Variable Speed Grinder | Buehler | EcoMet 3000 | Used with silicon carbide grit papers during hand polishing. |
| Vibration isolation table (active) | Herzan | TS-140 | Used with Bruker MultiMode AFM. Sits on a TMC 65-531 vibration isolation table. Bruker Dimension Icon AFM utilizes strictly passive vibration isolation (comes from manufacturer with custom acoustic hood, air table, and granite slab). |
| Vibration isolation table (passive) | TMC | 65-531 | 35" x 30" vibration isolation table with optional air damping (disabled). Used with Bruker MultiMode AFM. Herzan TS-140 "Table Stable" active vibration control table is located on top. |
Ссылки
- Hart, E. W. Theory of the tensile test. Acta Metallurgica. 15 (2), 351-355 (1967).
- Fell, J. T., Newton, J. M. Determination of tablet strength by the diametral-compression test. Journal of Pharmaceutical Sciences. 59 (5), 688-691 (1970).
- Babiak, M., Gaff, M., Sikora, A., Hysek, &. #. 3. 5. 2. ;. Modulus of elasticity in three- and four-point bending of wood. Composite Structures. 204, 454-465 (2018).
- Song, S., Yovanovich, M. M. Relative contact pressure-Dependence on surface roughness and Vickers microhardness. Journal of Thermophysics and Heat Transfer. 2 (1), 43-47 (1988).
- Hays, C., Kendall, E. G. An analysis of Knoop microhardness. Metallography. 6 (4), 275-282 (1973).
- Hill, R., Storåkers, B., Zdunek, A. B. A theoretical study of the Brinell hardness test. Proceedings of the Royal Society of London. A. Mathematical and Physical Sciences. 423 (1865), 301-330 (1989).
- Oliver, W. C., Pharr, G. M. An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. Journal of Materials Research. 7 (6), 1564-1583 (1992).
- Sakharova, N. A., Fernandes, J. V., Antunes, J. M., Oliveira, M. C. Comparison between Berkovich, Vickers and conical indentation tests: A three-dimensional numerical simulation study. International Journal of Solids and Structures. 46 (5), 1095-1104 (2009).
- Cohen, S. R., Kalfon-Cohen, E. Dynamic nanoindentation by instrumented nanoindentation and force microscopy: a comparative review. Beilstein Journal of Nanotechnology. 4 (1), 815-833 (2013).
- Saha, R., Nix, W. D. Effects of the substrate on the determination of thin film mechanical properties by nanoindentation. Acta Materialia. 50 (1), 23-38 (2002).
- Tsui, T. Y., Pharr, G. M. Substrate effects on nanoindentation mechanical property measurement of soft films on hard substrates. Journal of Materials Research. 14 (1), 292-301 (1999).
- Cao, G., Gao, H. Mechanical properties characterization of two-dimensional materials via nanoindentation experiments. Progress in Materials Science. 103, 558-595 (2019).
- Castellanos-Gomez, A., Singh, V., vander Zant, H. S. J., Steele, G. A. Mechanics of freely-suspended ultrathin layered materials. Annalen der Physik. 527 (1-2), 27-44 (2015).
- Cao, C., Sun, Y., Filleter, T. Characterizing mechanical behavior of atomically thin films: A review. Journal of Materials Research. 29 (3), 338-347 (2014).
- Lee, C., Wei, X., Kysar, J. W., Hone, J. Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science. 321 (5887), 385-388 (2008).
- Elibol, K., et al. Visualising the strain distribution in suspended two-dimensional materials under local deformation. Scientific Reports. 6 (1), 28485 (2016).
- Castellanos-Gomez, A., et al. Mechanical properties of freely suspended atomically thin dielectric layers of mica. Nano Research. 5 (8), 550-557 (2012).
- Song, L., et al. Large scale growth and characterization of atomic hexagonal boron nitride layers. Nano Letters. 10 (8), 3209-3215 (2010).
- Castellanos-Gomez, A., et al. Elastic properties of freely suspended MoS2 nanosheets. Advanced Materials. 24 (6), 772-775 (2012).
- D'Costa, N. P., Hoh, J. H. Calibration of optical lever sensitivity for atomic force microscopy. Review of Scientific Instruments. 66 (10), 5096-5097 (1995).
- Wu, Y., et al. Evaluation of elastic modulus and hardness of crop stalks cell walls by nano-indentation. Bioresource Technology. 101 (8), 2867-2871 (2010).
- Barns, S., et al. Investigation of red blood cell mechanical properties using AFM indentation and coarse-grained particle method. BioMedical Engineering OnLine. 16 (1), 140 (2017).
- Hermanowicz, P., Sarna, M., Burda, K., Gabryś, H. AtomicJ: An open source software for analysis of force curves. Review of Scientific Instruments. 85 (6), 063703 (2014).
- Broitman, E. Indentation hardness measurements at macro-, micro-, and nanoscale: a critical overview. Tribology Letters. 65 (1), 23 (2016).
- Tiwari, A. . Nanomechanical Analysis of High Performance Materials. , (2015).
- Aggarwal, R. L., Ramdas, A. K. . Physical Properties of Diamond and Sapphire. , (2019).
- Boyd, E. J., Uttamchandani, D. Measurement of the anisotropy of Young's modulus in single-crystal silicon. Journal of Microelectromechanical Systems. 21 (1), 243-249 (2012).
- Harding, J. W., Sneddon, I. N. The elastic stresses produced by the indentation of the plane surface of a semi-infinite elastic solid by a rigid punch. Mathematical Proceedings of the Cambridge Philosophical Society. 41 (1), 16-26 (2008).
- Lin, D. C., Dimitriadis, E. K., Horkay, F. Robust strategies for automated AFM force curve analysis-I. Non-adhesive indentation of soft, inhomogeneous materials. Journal of Biomechanical Engineering. 129 (3), 430-440 (2006).
- Lin, D. C., Dimitriadis, E. K., Horkay, F. Robust strategies for automated AFM force curve analysis-II: Adhesion-influenced indentation of soft, elastic materials. Journal of Biomechanical Engineering. 129 (6), 904-912 (2007).
- Haile, S., Palmer, M., Otey, A. Potential of loblolly pine: switchgrass alley cropping for provision of biofuel feedstock. Agroforestry Systems. 90 (5), 763-771 (2016).
- Lu, X., et al. Biomass logistics analysis for large scale biofuel production: Case study of loblolly pine and switchgrass. Bioresource Technology. 183, 1-9 (2015).
- Susaeta, A., Lal, P., Alavalapati, J., Mercer, E., Carter, D. Economics of intercropping loblolly pine and switchgrass for bioenergy markets in the southeastern United States. Agroforestry Systems. 86 (2), 287-298 (2012).
- Garcia, R. Nanomechanical mapping of soft materials with the atomic force microscope: methods, theory and applications. Chemical Society Reviews. 49 (16), 5850-5884 (2020).
- Derjaguin, B. V., Muller, V. M., Toporov, Y. P. Effect of contact deformations on the adhesion of particles. Journal of Colloid and Interface Science. 53 (2), 314-326 (1975).
- Ciesielski, P. N., et al. Engineering plant cell walls: tuning lignin monomer composition for deconstructable biofuel feedstocks or resilient biomaterials. Green Chemistry. 16 (5), 2627-2635 (2014).
- Liu, K., Ostadhassan, M., Zhou, J., Gentzis, T., Rezaee, R. Nanoscale pore structure characterization of the Bakken shale in the USA. Fuel. 209, 567-578 (2017).
- Maryon, O. O., et al. Co-localizing Kelvin probe force microscopy with other microscopies and spectroscopies: selected applications in corrosion characterization of alloys. JoVE. (184), e64102 (2022).
- Eliyahu, M., Emmanuel, S., Day-Stirrat, R. J., Macaulay, C. I. Mechanical properties of organic matter in shales mapped at the nanometer scale. Marine and Petroleum Geology. 59, 294-304 (2015).
- Li, C., et al. Nanomechanical characterization of organic matter in the Bakken formation by microscopy-based method. Marine and Petroleum Geology. 96, 128-138 (2018).
- Bouzid, T., et al. The LINC complex, mechanotransduction, and mesenchymal stem cell function and fate. Journal of Biological Engineering. 13 (1), 68 (2019).
- Dupont, S., et al. Role of YAP/TAZ in mechanotransduction. Nature. 474 (7350), 179-183 (2011).
- Wang, S., et al. CCM3 is a gatekeeper in focal adhesions regulating mechanotransduction and YAP/TAZ signalling. Nature Cell Biology. 23 (7), 758-770 (2021).
- Sen, B., et al. Mechanical strain inhibits adipogenesis in mesenchymal stem cells by stimulating a durable β-catenin signal. Endocrinology. 149 (12), 6065-6075 (2008).
- Sen, B., et al. mTORC2 regulates mechanically induced cytoskeletal reorganization and lineage selection in marrow-derived mesenchymal stem cells. Journal of Bone and Mineral Research. 29 (1), 78-89 (2014).
- Sen, B., et al. Mechanically induced nuclear shuttling of β-catenin requires co-transfer of actin. Stem Cells. 40 (4), 423-434 (2022).
- Newberg, J., et al. Isolated nuclei stiffen in response to low intensity vibration. Journal of Biomechanics. 111, 110012 (2020).
- Ding, Y., Xu, G. -. K., Wang, G. -. F. On the determination of elastic moduli of cells by AFM based indentation. Scientific Reports. 7 (1), 45575 (2017).
- Khadka, N. K., Timsina, R., Rowe, E., O'Dell, M., Mainali, L. Mechanical properties of the high cholesterol-containing membrane: An AFM study. Biochimica et Biophysica Acta. Biomembranes. 1863 (8), 183625 (2021).
- Castellana, E. T., Cremer, P. S. Solid supported lipid bilayers: From biophysical studies to sensor design. Surface Science Reports. 61 (10), 429-444 (2006).
- Qian, L., Zhao, H. Nanoindentation of soft biological materials. Micromachines. 9 (12), 654 (2018).
- Pittenger, B., Yablon, D. Improving the accuracy of nanomechanical measurements with force-curve-based AFM techniques. Bruker Application Notes. 149, (2017).
- Vorselen, D., Kooreman, E. S., Wuite, G. J. L., Roos, W. H. Controlled tip wear on high roughness surfaces yields gradual broadening and rounding of cantilever tips. Scientific Reports. 6 (1), 36972 (2016).
- Bhaskaran, H., et al. Ultralow nanoscale wear through atom-by-atom attrition in silicon-containing diamond-like carbon. Nature Nanotechnology. 5 (3), 181-185 (2010).
- Giannazzo, F., Schilirò, E., Greco, G., Roccaforte, F. Conductive atomic force microscopy of semiconducting transition metal dichalcogenides and heterostructures. Nanomaterials. 10 (4), 803 (2020).
- Melitz, W., Shen, J., Kummel, A. C., Lee, S. Kelvin probe force microscopy and its application. Surface Science Reports. 66 (1), 1-27 (2011).
- Kazakova, O., et al. Frontiers of magnetic force microscopy. Journal of Applied Physics. 125 (6), 060901 (2019).
- Kim, H. -. J., Yoo, S. -. S., Kim, D. -. E. Nano-scale wear: A review. International Journal of Precision Engineering and Manufacturing. 13 (9), 1709-1718 (2012).
- Heath, G. R., et al. Localization atomic force microscopy. Nature. 594 (7863), 385-390 (2021).
- Strahlendorff, T., Dai, G., Bergmann, D., Tutsch, R. Tip wear and tip breakage in high-speed atomic force microscopes. Ultramicroscopy. 201, 28-37 (2019).
- Lantz, M. A., et al. Wear-resistant nanoscale silicon carbide tips for scanning probe applications. Advanced Functional Materials. 22 (8), 1639-1645 (2012).
- Khurshudov, A. G., Kato, K., Koide, H. Wear of the AFM diamond tip sliding against silicon. Wear. 203, 22-27 (1997).
- Villarrubia, J. S. Algorithms for scanned probe microscope image simulation, surface reconstruction, and tip estimation. Journal of Research of the National Institute of Standards and Technology. 102 (4), 425 (1997).
- Kain, L., et al. Calibration of colloidal probes with atomic force microscopy for micromechanical assessment. Journal of the Mechanical Behavior of Biomedical Materials. 85, 225-236 (2018).
- Slattery, A. D., Blanch, A. J., Quinton, J. S., Gibson, C. T. Accurate measurement of Atomic Force Microscope cantilever deflection excluding tip-surface contact with application to force calibration. Ultramicroscopy. 131, 46-55 (2013).
- Dobrovinskaya, E. R., Lytvynov, L. A., Pishchik, V. . Sapphire: Material, Manufacturing, Applications. , (2009).
- te Riet, J., et al. Interlaboratory round robin on cantilever calibration for AFM force spectroscopy. Ultramicroscopy. 111 (12), 1659-1669 (2011).
- Pratt, J. R., Shaw, G. A., Kumanchik, L., Burnham, N. A. Quantitative assessment of sample stiffness and sliding friction from force curves in atomic force microscopy. Journal of Applied Physics. 107 (4), 044305 (2010).
- Slattery, A. D., Blanch, A. J., Quinton, J. S., Gibson, C. T. Calibration of atomic force microscope cantilevers using standard and inverted static methods assisted by FIB-milled spatial markers. Nanotechnology. 24 (1), 015710 (2012).
- Higgins, M. J., et al. Noninvasive determination of optical lever sensitivity in atomic force microscopy. Review of Scientific Instruments. 77 (1), 013701 (2006).
- Lévy, R., Maaloum, M. Measuring the spring constant of atomic force microscope cantilevers: thermal fluctuations and other methods. Nanotechnology. 13 (1), 33-37 (2001).
- Sikora, A. Quantitative normal force measurements by means of atomic force microscopy towards the accurate and easy spring constant determination. Nanoscience and Nanometrology. 2 (1), 8-29 (2016).
- Ohler, B. Cantilever spring constant calibration using laser Doppler vibrometry. Review of Scientific Instruments. 78 (6), 063701 (2007).
- Gates, R. S., Pratt, J. R. Accurate and precise calibration of AFM cantilever spring constants using laser Doppler vibrometry. Nanotechnology. 23 (37), 375702 (2012).
- Cleveland, J. P., Manne, S., Bocek, D., Hansma, P. K. A nondestructive method for determining the spring constant of cantilevers for scanning force microscopy. Review of Scientific Instruments. 64 (2), 403-405 (1993).
- Sader, J. E., Chon, J. W. M., Mulvaney, P. Calibration of rectangular atomic force microscope cantilevers. Review of Scientific Instruments. 70 (10), 3967-3969 (1999).
- Sader, J. E., et al. Spring constant calibration of atomic force microscope cantilevers of arbitrary shape. Review of Scientific Instruments. 83 (10), 103705 (2012).
- Sader, J. E. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. Journal of Applied Physics. 84 (1), 64-76 (1998).
- Sader, J. E., Pacifico, J., Green, C. P., Mulvaney, P. General scaling law for stiffness measurement of small bodies with applications to the atomic force microscope. Journal of Applied Physics. 97 (12), 124903 (2005).
- Mendels, D. -. A., et al. Dynamic properties of AFM cantilevers and the calibration of their spring constants. Journal of Micromechanics and Microengineering. 16 (8), 1720-1733 (2006).
- Gao, S., Brand, U. In-situ nondestructive characterization of the normal spring constant of AFM cantilevers. Measurement Science and Technology. 25 (4), 044014 (2014).
- Gibson, C. T., Watson, G. S., Myhra, S. Determination of the spring constants of probes for force microscopy/spectroscopy. Nanotechnology. 7 (3), 259-262 (1996).
- Gates, R. S., Pratt, J. R. Prototype cantilevers for SI-traceable nanonewton force calibration. Measurement Science and Technology. 17 (10), 2852-2860 (2006).
- Neumeister, J. M., Ducker, W. A. Lateral, normal, and longitudinal spring constants of atomic force microscopy cantilevers. Review of Scientific Instruments. 65 (8), 2527-2531 (1994).
- Kim, M. S., Choi, I. M., Park, Y. K., Kang, D. I. Atomic force microscope probe calibration by use of a commercial precision balance. Measurement. 40 (7), 741-745 (2007).
- Kim, M. -. S., Choi, J. -. H., Park, Y. -. K., Kim, J. -. H. Atomic force microscope cantilever calibration device for quantified force metrology at micro- or nano-scale regime: the nano force calibrator (NFC). Metrologia. 43 (5), 389-395 (2006).
- Tian, Y., et al. A novel method and system for calibrating the spring constant of atomic force microscope cantilever based on electromagnetic actuation. Review of Scientific Instruments. 89 (12), 125119 (2018).
- Clifford, C. A., Seah, M. P. The determination of atomic force microscope cantilever spring constants via dimensional methods for nanomechanical analysis. Nanotechnology. 16 (9), 1666-1680 (2005).
- Chen, B. -. Y., Yeh, M. -. K., Tai, N. -. H. Accuracy of the spring constant of atomic force microscopy cantilevers by finite element method. Analytical Chemistry. 79 (4), 1333-1338 (2007).
- Mick, U., Eichhorn, V., Wortmann, T., Diederichs, C., Fatikow, S. Combined nanorobotic AFM/SEM system as novel toolbox for automated hybrid analysis and manipulation of nanoscale objects. 2010 IEEE International Conference on Robotics and Automation. , 4088-4093 (2010).
- Kim, M. -. S., Choi, J. -. H., Kim, J. -. H., Park, Y. -. K. Accurate determination of spring constant of atomic force microscope cantilevers and comparison with other methods. Measurement. 43 (4), 520 (2010).
- Zhang, G., Wei, Z., Ferrell, R. E. Elastic modulus and hardness of muscovite and rectorite determined by nanoindentation. Applied Clay Science. 43 (2), 271-281 (2009).
- Bobko, C. P., Ortega, J. A., Ulm, F. -. J. Comment on "Elastic modulus and hardness of muscovite and rectorite determined by nanoindentation by G. Zhang, Z. Wei and R.E. Ferrell. Applied Clay Science. 46 (4), 425-428 (2009).
- Zhang, G., Wei, Z., Ferrell, R. E. Reply to the Comment on "Elastic modulus and hardness of muscovite and rectorite determined by nanoindentation" by G. Zhang, Z. Wei and R. E. Ferrell. Applied Clay Science. 46 (4), 429-432 (2009).
- Jin, D. W., et al. Thermal stability and Young's modulus of mechanically exfoliated flexible mica. Current Applied Physics. 18 (12), 1486-1491 (2018).
- Xiao, J., et al. Anisotropic friction behaviour of highly oriented pyrolytic graphite. Carbon. 65, 53-62 (2013).
- Hertz, H. Ueber die Berührung fester elastischer Körper. Journal für die reine und angewandte Mathematik. 1882 (92), 156-171 (1882).
- Johnson, K. L., Kendall, K., Roberts, A. D., Tabor, D. Surface energy and the contact of elastic solids. Proceedings of the Royal Society of London. A. Mathematical and Physical Sciences. 324 (1558), 301-313 (1971).
- Muller, V. M., Derjaguin, B. V., Toporov, Y. P. On two methods of calculation of the force of sticking of an elastic sphere to a rigid plane. Colloids and Surfaces. 7 (3), 251-259 (1983).
- Maugis, D. Adhesion of spheres: The JKR-DMT transition using a dugdale model. Journal of Colloid and Interface Science. 150 (1), 243-269 (1992).
- Muller, V. M., Yushchenko, V. S., Derjaguin, B. V. On the influence of molecular forces on the deformation of an elastic sphere and its sticking to a rigid plane. Journal of Colloid and Interface Science. 77 (1), 91-101 (1980).
- Muller, V. M., Yushchenko, V. S., Derjaguin, B. V. General theoretical consideration of the influence of surface forces on contact deformations and the reciprocal adhesion of elastic spherical particles. Journal of Colloid and Interface Science. 92 (1), 92-101 (1983).
- Johnson, K. L., Greenwood, J. A. An adhesion map for the contact of elastic spheres. Journal of Colloid and Interface Science. 192 (2), 326-333 (1997).
- Shi, X., Zhao, Y. -. P. Comparison of various adhesion contact theories and the influence of dimensionless load parameter. Journal of Adhesion Science and Technology. 18 (1), 55-68 (2004).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены